A Thermodynamical Selection-Based Discrete Differential Evolution for the 0-1 Knapsack Problem

Abstract
:1. Introduction
2. Differential Evolution
2.1. Mutation Operator
2.2. Crossover Operator
2.3. Selection Operator
2.4. Discrete Mutation Operator
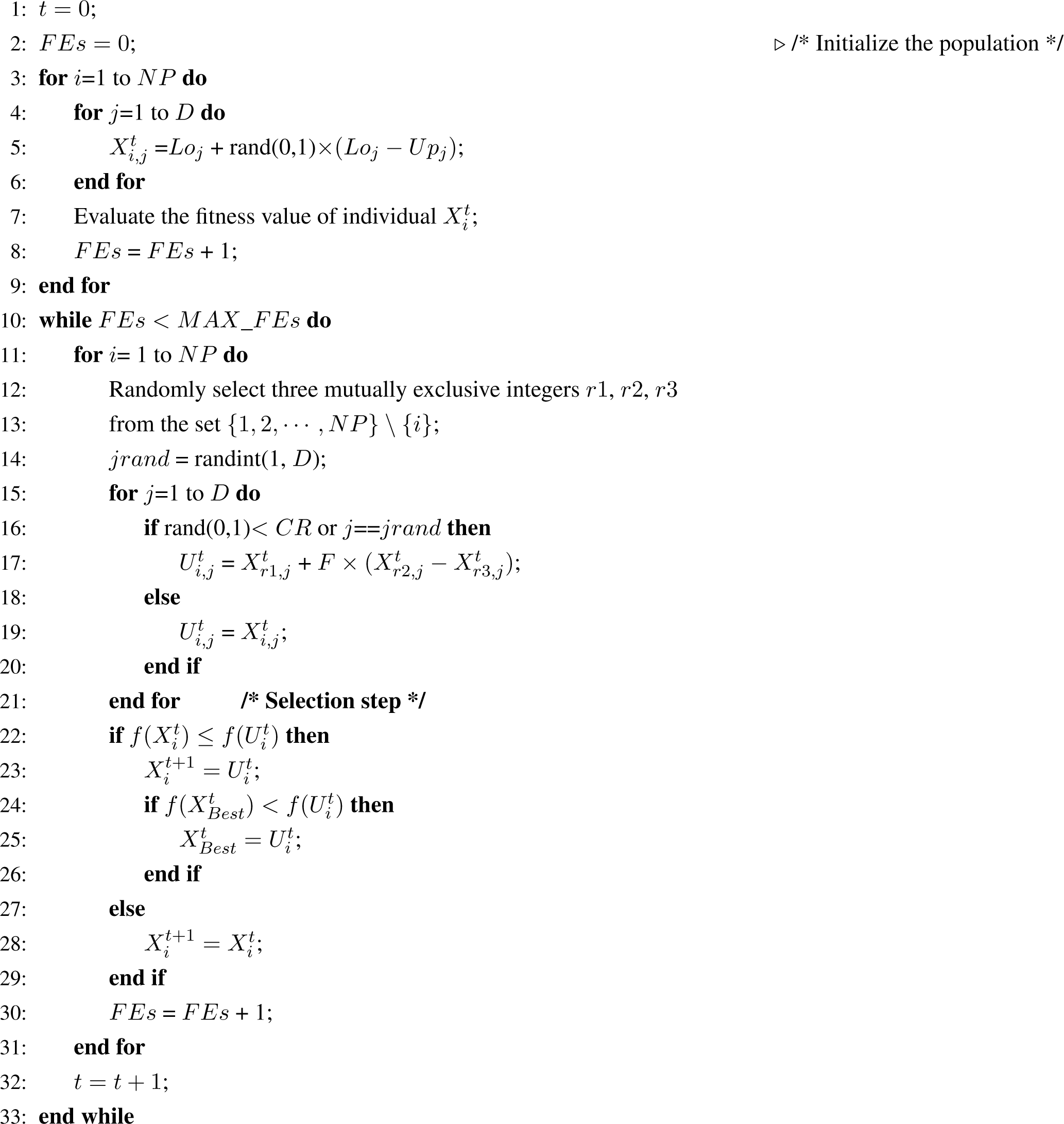
2.5. Algorithmic Description of DE

{kind=link}
{kind=link}
{kind=link}
 |
3. Proposed Selection Operator for DE
3.1. Motivations
3.2. Energy
3.3. Entropy
3.4. Description of Thermodynamical Selection Operator for DE
| Input: Temperature T, the parent population Pt and the offspring population Ot; |
| Output: The next generation population Pt+1; |
| 1: Combine the parent population Pt with the offspring population Ot to constitute a temporary population ; |
| 2: Calculate the free energy of each individual in the temporary population according to Equation (15); |
| 3: Choose the top M individuals with maximal free energy; |
| 4: Remove the chosen M individuals from ; |
| 5: Create the next generation population Pt+1 by the remaining individuals in . |
4. Proposed TDDE
4.1. Population Initialization
4.2. Discrete Mutation Operator
4.3. Crossover Operator
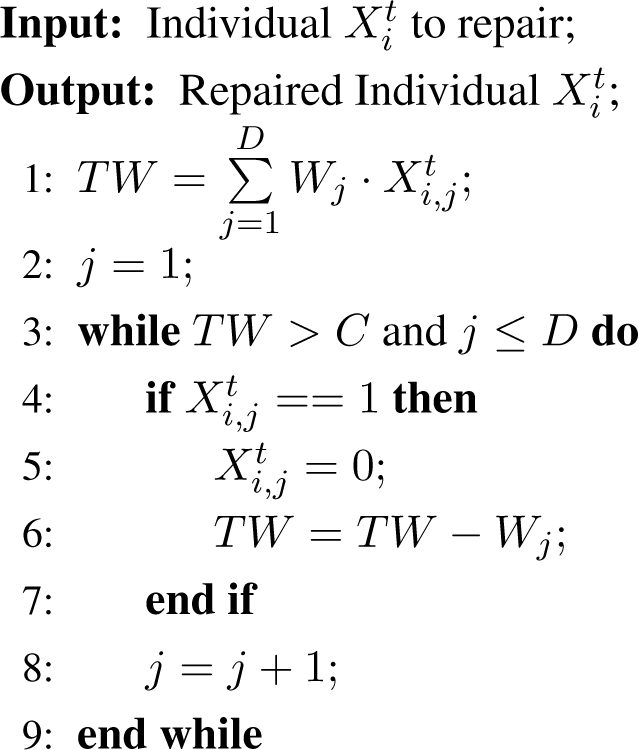
4.4. Repair Operator
 |
4.5. Procedure of TDDE
4.6. Runtime Complexity of TDDE
 |
5. Numerical Experiments
5.1. Experimental Setup
5.2. Adjusting Parameter Settings
5.3. Comparison with Existing Algorithms
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kosuch, S.; Lisser, A. Upper bounds for the 0-1 stochastic knapsack problem and a B&B algorithm. Ann. Oper. Res 2010, 176, 77–93. [Google Scholar]
- Bandyopadhyay, S.; Maulik, U.; Chakraborty, R. Incorporating ϵ-dominance in AMOSA: Application to multiobjective 0/1 knapsack problem and clustering gene expression data. Appl. Soft Comput 2013, 13, 2405–2411. [Google Scholar]
- Kumar, R.; Singh, P.K. Assessing solution quality of biobjective 0-1 knapsack problem using evolutionary and heuristic algorithms. Appl. Soft Comput 2010, 10, 711–718. [Google Scholar]
- Zou, D.; Gao, L.; Li, S.; Wu, J. Solving 0-1 knapsack problem by a novel global harmony search algorithm. Appl. Soft Comput 2011, 11, 1556–1564. [Google Scholar]
- Bansal, J.C.; Deep, K. A modified binary particle swarm optimization for knapsack problems. Appl. Math. Comput 2012, 218, 11042–11061. [Google Scholar]
- Truong, T.K.; Li, K.; Xu, Y. Chemical reaction optimization with greedy strategy for the 0-1 knapsack problem. Appl. Soft Comput 2013, 13, 1774–1780. [Google Scholar]
- Lee, J.H. Determination of optimal water quality monitoring points in sewer systems using entropy theory. Entropy 2013, 15, 3419–3434. [Google Scholar]
- Zhan, Z.H.; Li, J.; Cao, J.; Zhang, J.; Chung, H.H.; Shi, Y.H. Multiple populations for multiple objectives: A coevolutionary technique for solving multiobjective optimization problems. IEEE Trans. Cybern 2013, 43, 445–463. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multiobjective optimization. Eng. Optim 2014, 46, 1222–1237. [Google Scholar]
- Yang, X.S.; Deb, S.; Fong, S. Bat algorithm is better than intermittent search strategy. J. Mult.-Valued Log. Soft Comput 2014, 22, 223–237. [Google Scholar]
- Guillén, A.; García Arenas, M.I.; van Heeswijk, M.; Sovilj, D.; Lendasse, A.; Herrera, L.J.; Pomares, H.; Rojas, I. Fast feature selection in a GPU cluster using the Delta Test. Entropy 2014, 16, 854–869. [Google Scholar]
- Shi, H. Solution to 0/1 knapsack problem based on improved ant colony algorithm. Proceedings of 2006 International Conference on Information Acquisition, Weihai, China, 20–23 August 2006; pp. 1062–1066.
- Neoh, S.C.; Morad, N.; Lim, C.P.; Aziz, Z.A. A GA-PSO layered encoding evolutionary approach to 0/1 knapsack optimization. Int. J. Innov. Comput. Inf. Control 2010, 6, 3489–3505. [Google Scholar]
- Shang, R.; Jiao, L.; Li, Y.; Wu, J. Quantum immune clonal selection algorithm for multi-objective 0/1 knapsack problems. Chin. Phys. Lett 2010, 27, 010308. [Google Scholar]
- Layeb, A. A novel quantum inspired cuckoo search for knapsack problems. Int. J. Bio-Inspired Comput 2011, 3, 297–305. [Google Scholar]
- Chiu, C.H.; Yang, Y.J.; Chou, Y.H. Quantum-inspired tabu search algorithm for solving 0/1 knapsack problems. Proceedings of the 13th Annual Conference Companion on Genetic and Evolutionary Computation, Dublin, Ireland, 12–16 July 2011; pp. 55–56.
- Sabet, S.; Farokhi, F.; Shokouhifar, M. A novel artificial bee colony algorithm for the knapsack problem. Proceedings of 2012 International Symposium on Innovations in Intelligent Systems and Applications (INISTA), Trabzon, Turkey, 2–4 July 2012; pp. 1–5.
- Gherboudj, A.; Layeb, A.; Chikhi, S. Solving 0-1 knapsack problems by a discrete binary version of cuckoo search algorithm. Int. J. Bio-Inspired Comput 2012, 4, 229–236. [Google Scholar]
- Layeb, A. A hybrid quantum inspired harmony search algorithm for 0-1 optimization problems. J. Comput. Appl. Math 2013, 253, 14–25. [Google Scholar]
- Lu, T.; Yu, G. An adaptive population multi-objective quantum-inspired evolutionary algorithm for multi-objective 0/1 knapsack problems. Inf. Sci 2013, 243, 39–56. [Google Scholar]
- Deng, C.; Zhao, B.; Yang, Y.; Zhang, H. Binary encoding differential evolution with application to combinatorial optimization problem. Proceedings of 2013 Chinese Intelligent Automation Conference, Yangzhou, China, 23–25 August 2013; pp. 77–84.
- Zhang, X.; Huang, S.; Hu, Y.; Zhang, Y.; Mahadevan, S.; Deng, Y. Solving 0-1 knapsack problems based on amoeboid organism algorithm. Appl. Math. Comput 2013, 219, 9959–9970. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim 1997, 11, 341–359. [Google Scholar]
- Brest, J.; Greiner, S.; Boskovic, B.; Mernik, M.; Zumer, V. Self-adapting control parameters in differential evolution: A comparative study on numerical benchmark problems. IEEE Trans. Evol. Comput 2006, 10, 646–657. [Google Scholar]
- Neri, F.; Tirronen, V. Recent advances in differential evolution: A survey and experimental analysis. Artif. Intell. Rev 2010, 33, 61–106. [Google Scholar]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput 2011, 15, 4–31. [Google Scholar]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential evolution algorithm with strategy adaptation for global numerical optimization. IEEE Trans. Evol. Comput 2009, 13, 398–417. [Google Scholar]
- Zhang, J.; Sanderson, A.C. JADE: Adaptive differential evolution with optional external archive. IEEE Trans. Evol. Comput 2009, 13, 945–958. [Google Scholar]
- Pan, Q.K.; Suganthan, P.N.; Wang, L.; Gao, L.; Mallipeddi, R. A differential evolution algorithm with self-adapting strategy and control parameters. Comput. Oper. Res 2011, 38, 394–408. [Google Scholar]
- Wang, Y.; Cai, Z.; Zhang, Q. Differential evolution with composite trial vector generation strategies and control parameters. IEEE Trans. Evol. Comput 2011, 15, 55–66. [Google Scholar]
- Mallipeddi, R.; Suganthan, P.N.; Pan, Q.K.; Tasgetiren, M.F. Differential evolution algorithm with ensemble of parameters and mutation strategies. Appl. Soft Comput 2011, 11, 1679–1696. [Google Scholar]
- Wang, H.; Rahnamayan, S.; Sun, H.; Omran, M.G. Gaussian bare-bones differential evolution. IEEE Trans. Cybern 2013, 43, 634–647. [Google Scholar]
- Gong, W.; Cai, Z.; Ling, C.X.; Li, C. Enhanced differential evolution with adaptive strategies for numerical optimization. IEEE Trans. Syst. Man. Cybern. B 2011, 41, 397–413. [Google Scholar]
- Wang, L.; Pan, Q.K.; Suganthan, P.N.; Wang, W.H.; Wang, Y.M. A novel hybrid discrete differential evolution algorithm for blocking flow shop scheduling problems. Comput. Oper. Res 2010, 37, 509–520. [Google Scholar]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Shi, Y.H. Orthogonal learning particle swarm optimization. IEEE Trans. Evol. Comput 2011, 15, 832–847. [Google Scholar]
- Cui, Z.; Fan, S.; Shi, Z. Social emotional optimization algorithm with Gaussian distribution for optimal coverage problem. Sens. Lett 2013, 11, 259–263. [Google Scholar]
- Pires, E.J.S.; Machado, J.A.T.; de Moura Oliveira, P.B. Entropy diversity in multi-objective particle swarm optimization. Entropy 2013, 15, 5475–5491. [Google Scholar]
- Yang, X.; Deb, S. Multiobjective cuckoo search for design optimization. Comput. Oper. Res 2013, 40, 1616–1624. [Google Scholar]
- Guo, Z.; Wu, Z.; Dong, X.; Zhang, K.; Wang, S.; Li, Y. Component thermodynamical selection based gene expression programming for function finding. Math. Probl. Eng 2014, 2014. [Google Scholar] [CrossRef]
- Mori, N.; Yoshida, J.; Tamaki, H.; Nishikawa, H. A thermodynamical selection rule for the genetic algorithm. Proceedings of IEEE Congress on Evolutionary Computation (CEC1995), Perth, Australia, 29 November–1 December 1995; pp. 188–192.
- Ying, W.; Li, Y.; Peng, S.; Wang, W. A steep thermodynamical selection rule for evolutionary algorithms. Proceedings of the 7th International Conference on Computational Science—ICCS 2007, Beijing, China, 27–30 May 2007; pp. 997–1004.
- Ying, W.Q.; Li, Y.X.; Sheu, P.C.Y. Improving the computational efficiency of thermodynamical genetic algorithms. Chin. J. Softw 2008, 19, 1613–1622. [Google Scholar]
- Yu, F.; Li, Y.; Ying, W. An improved thermodynamics evolutionary algorithm based on the minimal free energy. Proceedings of the First International Conference on Advances in Swarm Intelligence (ICSI’10), Beijing, China, 12–15 June 2010; pp. 541–548.
- Das, S.; Abraham, A.; Chakraborty, U.K.; Konar, A. Differential evolution using a neighborhood-based mutation operator. IEEE Trans. Evol. Comput 2009, 13, 526–553. [Google Scholar]
- Garcıa, S.; Fernández, A.; Luengo, J.; Herrera, F. Advanced nonparametric tests for multiple comparisons in the design of experiments in computational intelligence and data mining: Experimental analysis of power. Inf. Sci 2010, 180, 2044–2064. [Google Scholar]
- Garcıa, S.; Herrera, F. An extension on Statistical comparisons of classifiers over multiple data sets for all pairwise comparisons. J. Mach. Learn. Res 2008, 9, 2677–2694. [Google Scholar]
- Wang, H.; Sun, H.; Li, C.; Rahnamayan, S.; Pan, J.-S. Diversity enhanced particle swarm optimization with neighborhood search. Inf. Sci 2013, 223, 119–135. [Google Scholar]
- Wang, H.; Wu, Z.; Rahnamayan, S.; Liu, Y.; Ventresca, M. Enhancing particle swarm optimization using generalized opposition-based learning. Inf. Sci 2011, 181, 4699–4714. [Google Scholar]
- Wang, Y.; Cai, Z.; Zhang, Q. Enhancing the search ability of differential evolution through orthogonal crossover. Inf. Sci 2012, 185, 153–177. [Google Scholar]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput 1999, 3, 82–102. [Google Scholar]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput 1997, 1, 67–82. [Google Scholar]
- Demšar, J. Statistical comparisons of classifiers over multiple data sets. J. Mach. Learn. Res 2006, 7, 1–30. [Google Scholar]
- Garcıa, S.; Molina, D.; Lozano, M.; Herrera, F. A study on the use of non-parametric tests for analyzing the evolutionary algorithms behaviour: A case study on the CEC2005 special session on real parameter optimization. J. Heuristics 2009, 15, 617–644. [Google Scholar]
- Wang, H.; Wu, Z.; Rahnamayan, S.; Sun, H.; Liu, Y.; Pan, J.-S. Multi-strategy ensemble artificial bee colony algorithm. Inf. Sci 2014, 279, 587–603. [Google Scholar]
| Instance | D |
|---|---|
| B1 | 500 |
| B2 | 500 |
| B3 | 500 |
| B4 | 500 |
| B5 | 500 |
| B6 | 1000 |
| B7 | 1000 |
| B8 | 1000 |
| B9 | 1000 |
| B10 | 1000 |
| B11 | 1500 |
| B12 | 1500 |
| B13 | 1500 |
| B14 | 1500 |
| B15 | 1500 |
| B16 | 2000 |
| B17 | 2000 |
| B18 | 2000 |
| B19 | 2000 |
| B20 | 2000 |
| Instance | K = 0.1 × NP Mean ± SD | K = 0.2 × NP Mean ± SD | K = 0.3 × NP Mean ± SD | K = 0.4 × NP Mean ± SD | K = 0.5 × NP Mean ± SD |
|---|---|---|---|---|---|
| B1 | 31,462.00±000.00 | 31,462.00±000.00 | 31,462.00±000.00 | 31,454.33±010.84 | 31,460.67±001.89 |
| B2 | 31,548.00±001.41 | 31,546.67±003.30 | 31,549.00±000.00 | 31,547.00±001.63 | 31,549.00±000.00 |
| B3 | 31,551.00±007.07 | 31,556.00±000.00 | 31,556.00±000.00 | 31,555.67±000.47 | 31,555.67±000.47 |
| B4 | 32,065.00±000.00 | 32,065.00±000.00 | 32,065.00±000.00 | 32,064.33±000.94 | 32,065.00±000.00 |
| B5 | 31,826.33±024.98 | 31,842.67±000.94 | 31,843.67±000.47 | 31,844.00±000.82 | 31,843.00±000.82 |
| B6 | 63,352.67±035.26 | 63,396.00±004.32 | 63,365.67±024.85 | 63,352.33±031.90 | 63,394.33±017.93 |
| B7 | 64,832.33±047.44 | 64,855.00±020.83 | 64,854.67±010.21 | 64,836.00±035.19 | 64,847.67±024.50 |
| B8 | 64,288.67±036.54 | 64,258.00±025.57 | 64,257.00±041.09 | 64,267.33±009.98 | 64,240.67±051.88 |
| B9 | 63,105.67±033.16 | 63,041.00±063.89 | 63,089.33±021.67 | 63,058.67±044.78 | 63,084.67±016.44 |
| B10 | 62,792.67±004.64 | 62,827.00±058.90 | 62,874.67±008.58 | 62,815.00±058.09 | 62,804.67±072.67 |
| B11 | 95,047.00±121.99 | 95,141.33±070.28 | 95,069.67±098.85 | 95,121.00±086.56 | 95,004.67±068.56 |
| B12 | 95,198.00±078.69 | 95,262.00±058.38 | 95,119.67±054.38 | 95,172.00±125.32 | 95,067.67±202.71 |
| B13 | 95,204.00±074.57 | 95,090.00±109.24 | 95,104.33±055.80 | 95,079.00±121.69 | 95,205.00±031.97 |
| B14 | 95,406.00±102.60 | 95,225.33±100.69 | 95,351.33±065.73 | 95,293.67±069.28 | 95,207.00±091.88 |
| B15 | 95,206.33±056.25 | 95,186.67±031.14 | 95,178.33±117.24 | 95,266.33±018.26 | 95,023.33±091.27 |
| B16 | 126,582.00±182.78 | 126,898.33±045.47 | 126,528.67±213.34 | 126,629.67±155.39 | 126,502.67±264.36 |
| B17 | 127,524.33±125.49 | 127,548.33±141.44 | 127,467.67±158.69 | 127,619.67±041.25 | 127,574.67±133.35 |
| B18 | 126,411.33±292.01 | 126,885.33±039.16 | 126,232.67±246.37 | 126,450.00±102.54 | 126,360.00±167.51 |
| B19 | 126,659.67±098.80 | 126,532.33±105.85 | 126,457.33±198.15 | 126,519.33±155.84 | 126,476.00±234.06 |
| B20 | 127,236.33±170.00 | 127,501.67±012.97 | 127,264.33±058.22 | 127,248.00±075.98 | 127,119.33±106.58 |
| Values of K | Ranking |
|---|---|
| K = 0.2 × NP | 3.60 |
| K = 0.3 × NP | 3.08 |
| K = 0.1 × NP | 3.03 |
| K = 0.4 × NP | 2.93 |
| K = 0.5 × NP | 2.38 |
| Instance | M = 0.1 × NP Mean ± SD | M = 0.2 × NP Mean ± SD | M = 0.3 × NP Mean ± SD | M = 0.4 × NP Mean ± SD | M = 0.5 × NP Mean ± SD |
|---|---|---|---|---|---|
| B1 | 31,462.00±000.00 | 31,462.00±000.00 | 31,462.00±000.00 | 31,462.00±000.00 | 31,451.67±014.61 |
| B2 | 31,549.00±000.00 | 31,546.67±003.30 | 31,549.00±000.00 | 31,549.00±000.00 | 31,549.00±000.00 |
| B3 | 31,556.00±000.00 | 31,556.00±000.00 | 31,556.00±000.00 | 31,547.00±012.73 | 31,555.00±001.41 |
| B4 | 32,055.67±013.20 | 32,065.00±000.00 | 32,065.00±000.00 | 32,065.00±000.00 | 32,065.00±000.00 |
| B5 | 31,834.33±000.94 | 31,842.67±000.94 | 31,844.00±000.00 | 31,835.67±011.09 | 31,842.33±002.05 |
| B6 | 63,380.67±032.05 | 63,396.00±004.32 | 63,366.67±029.33 | 63,381.00±033.95 | 63,360.33±033.72 |
| B7 | 64,812.00±025.02 | 64,855.00±020.83 | 64,819.00±051.66 | 64,678.33±097.82 | 64,789.67±039.33 |
| B8 | 64,257.33±046.29 | 64,258.00±025.57 | 64,287.67±019.60 | 64,237.00±055.16 | 64,257.33±008.58 |
| B9 | 63,106.00±039.60 | 63,041.00±063.89 | 63,084.00±057.04 | 63,100.33±022.37 | 63,102.67±019.60 |
| B10 | 62,817.33±040.71 | 62,827.00±058.90 | 62,812.67±108.64 | 62,823.00±036.85 | 62,815.33±015.69 |
| B11 | 95,095.00±102.10 | 95,141.33±070.28 | 95,083.00±085.64 | 94,994.67±104.21 | 95,065.67±086.77 |
| B12 | 95,194.67±077.71 | 95,262.00±058.38 | 95,287.67±079.33 | 95,112.00±143.97 | 95,291.67±065.60 |
| B13 | 95,202.67±054.90 | 95,090.00±109.24 | 95,196.33±019.57 | 95,166.67±094.41 | 95,109.33±009.88 |
| B14 | 95,295.67±092.67 | 95,225.33±100.69 | 95,305.33±079.48 | 95,300.00±041.86 | 95,400.00±046.73 |
| B15 | 95,188.67±059.23 | 95,186.67±031.14 | 95,191.67±095.16 | 95,115.33±118.52 | 95,150.67±069.00 |
| B16 | 126,661.33±139.66 | 126,898.33±045.47 | 126,605.33±149.14 | 126,609.00±092.22 | 126,747.67±107.25 |
| B17 | 127,552.00±153.08 | 127,548.33±141.44 | 127,471.33±180.70 | 127,643.33±063.88 | 127,597.33±087.01 |
| B18 | 126,620.00±198.44 | 126,885.33±039.16 | 126,464.00±281.26 | 126,378.33±133.23 | 126,437.67±128.61 |
| B19 | 126,659.00±084.58 | 126,532.33±105.85 | 126,644.33±098.15 | 126,645.00±249.43 | 126,642.00±105.11 |
| B20 | 127,323.33±142.60 | 127,501.67±012.97 | 127,243.33±107.85 | 127,075.00±177.79 | 127,342.33±152.07 |
| Values of M | Ranking |
|---|---|
| M = 0.2 × NP | 3.35 |
| M = 0.1 × NP | 3.23 |
| M = 0.3 × NP | 3.18 |
| M = 0.5 × NP | 2.83 |
| M = 0.4 × NP | 2.43 |
| Instance | Mean ± SD
| |||
|---|---|---|---|---|
| TDGA | NGHS | W_DDE | TDDE | |
| B1 | 31,356.00±023.28+ | 31,315.00±015.90+ | 31,462.00±000.00≈ | 31,462.00±000.00 |
| B2 | 31,458.67±008.96+ | 31,399.33±009.43+ | 31,549.00±000.00− | 31,546.67±003.30 |
| B3 | 31,424.33±006.65+ | 31,399.00±027.60+ | 31,555.33±000.94+ | 31,556.00±000.00 |
| B4 | 31,975.00±025.35+ | 31,926.33±018.45+ | 32,065.00±000.00≈ | 32,065.00±000.00 |
| B5 | 31,740.00±007.48+ | 31,734.00±026.17+ | 31,843.00±000.82− | 31,842.67±000.94 |
| B6 | 61,893.00±115.52+ | 63,155.67±020.81+ | 63,282.33±067.24+ | 63,396.00±004.32 |
| B7 | 63,223.00±084.40+ | 64,504.67±052.36+ | 64,820.67±026.55+ | 64,855.00±020.83 |
| B8 | 62,772.00±036.85+ | 64,063.00±020.05+ | 64,224.00±029.44+ | 64,258.00±025.57 |
| B9 | 61,697.00±107.26+ | 62,810.00±023.93+ | 63,020.00±050.62≈ | 63,041.00±063.89 |
| B10 | 61,476.33±092.11+ | 62,661.33±029.78+ | 62,877.00±012.33− | 62,827.00±058.90 |
| B11 | 91,259.00±253.15+ | 95,071.33±071.97+ | 95,101.67±036.61+ | 95,141.33±070.28 |
| B12 | 91,537.00±246.98+ | 95,052.33±086.45+ | 95,208.00±076.46+ | 95,262.00±058.38 |
| B13 | 91,398.67±129.50+ | 95,120.33±105.00≈ | 95,266.67±070.52− | 95,090.00±109.24 |
| B14 | 91,352.33±136.79+ | 95,239.33±009.67≈ | 95,145.67±084.32+ | 95,225.33±100.69 |
| B15 | 91,488.00±086.73+ | 95,061.00±007.35+ | 94,961.67±145.06+ | 95,186.67±031.14 |
| B16 | 119,789.00±239.59+ | 126,804.33±047.26+ | 126,563.00±150.65+ | 126,898.33±045.47 |
| B17 | 120,460.67±051.69+ | 127,829.33±063.47− | 127,433.67±143.84+ | 127,548.33±141.44 |
| B18 | 119,701.67±130.91+ | 126,744.00±019.20+ | 126,518.33±054.36+ | 126,885.33±039.16 |
| B19 | 119,645.67±220.88+ | 126,937.00±016.87− | 126,580.67±049.94− | 126,532.33±105.85 |
| B20 | 120,389.33±186.34+ | 127,447.67±024.31+ | 127,038.00±071.16+ | 127,501.67±012.97 |
| − | 0 | 2 | 5 | |
| + | 20 | 16 | 12 | |
| ≈ | 0 | 2 | 3 | |
| Algorithm | Ranking |
|---|---|
| TDDE | 3.50 |
| W_DDE | 2.95 |
| NGHS | 2.30 |
| TDGA | 1.25 |
| TDDE vs. | p-values |
|---|---|
| TDGA | 8.86 × 10−5 |
| NGHS | 1.69 × 10−2 |
| W_DDE | 2.79 × 10−2 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Yue, X.; Zhang, K.; Wang, S.; Wu, Z. A Thermodynamical Selection-Based Discrete Differential Evolution for the 0-1 Knapsack Problem. Entropy 2014, 16, 6263-6285. https://doi.org/10.3390/e16126263
Guo Z, Yue X, Zhang K, Wang S, Wu Z. A Thermodynamical Selection-Based Discrete Differential Evolution for the 0-1 Knapsack Problem. Entropy. 2014; 16(12):6263-6285. https://doi.org/10.3390/e16126263
Chicago/Turabian StyleGuo, Zhaolu, Xuezhi Yue, Kejun Zhang, Shenwen Wang, and Zhijian Wu. 2014. "A Thermodynamical Selection-Based Discrete Differential Evolution for the 0-1 Knapsack Problem" Entropy 16, no. 12: 6263-6285. https://doi.org/10.3390/e16126263