
Mechanical Fault Diagnosis of High Voltage Circuit Breakers with Unknown Fault Type Using Hybrid Classifier Based on LMD and Time Segmentation Energy Entropy


Abstract
:1. Introduction
2. Vibration Signal Processing through LMD Method
2.1. Local Mean Decomposition (LMD) Analysis Method
- (1)
- Determine all local extreme of the signal , then calculate the mean value of two successive extreme and . Therefore, the mean value can be obtained by:
- (2)
- The envelope estimate can be calculated by:
- (3)
- The first envelope function can be obtained by the same smoothing method as the local means. The local mean function is separated from original signal , and the resulting signal denoted as can be derived by:
- (4)
- In order to achieve the demodulation of , is divided by the envelope function .
- (5)
- The envelope signal of the first product function is obtained by Equation (8).
- (6)
- Then, is separated from the original signal and a new signal is obtained. Take as a signal to be decomposed and repeat the procedure times until is a constant or a monotonic function.
2.2. Analysis of the Results Obtained by the LMD Method
3. Feature Extraction Based on Time Segmentation Energy Entropy
4. Hybrid Classifier with Support Vector Data Description (SVDD) and Fuzzy C-Means (FCM)
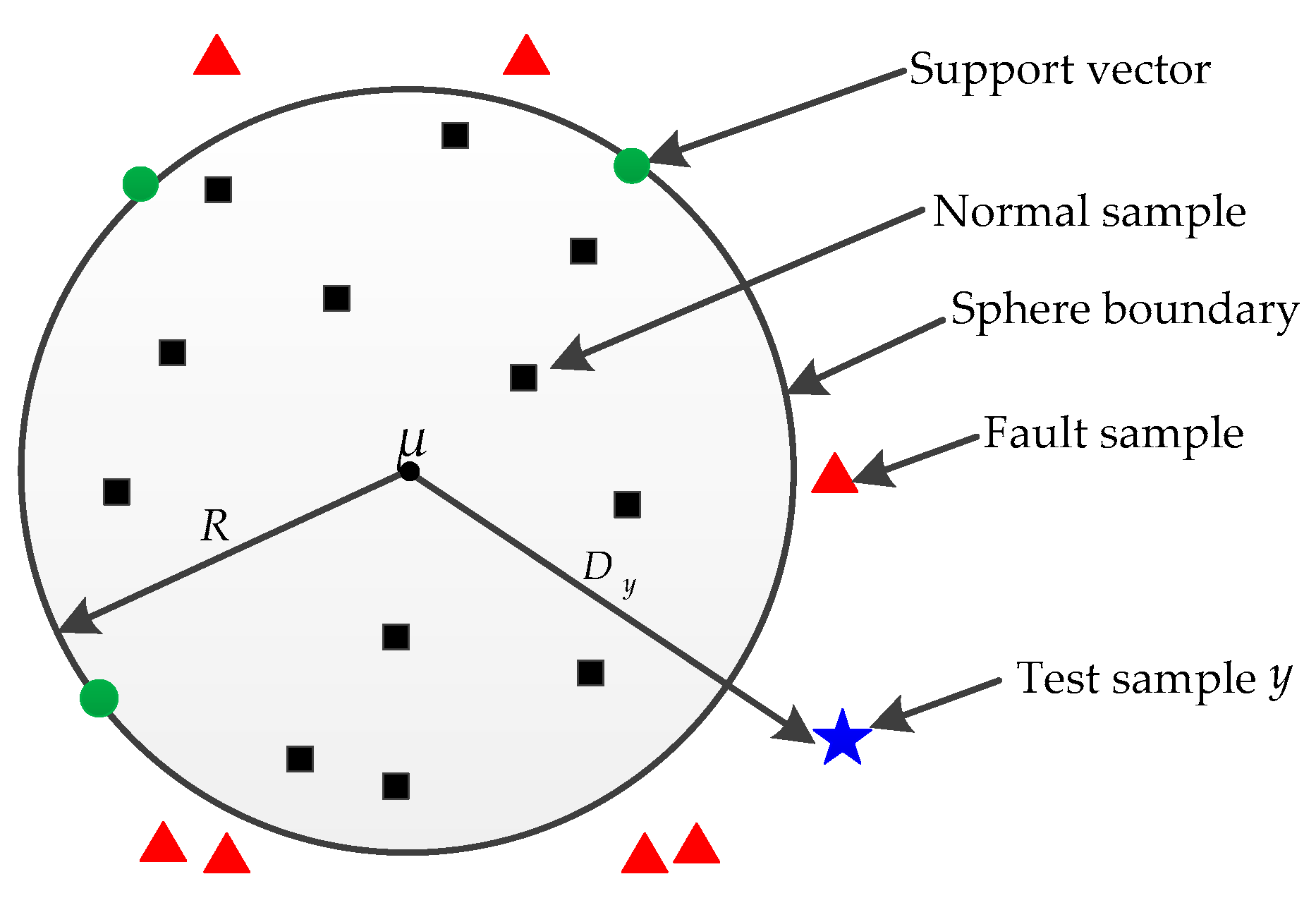
4.1. Support Vector Data Description
4.2. Fuzzy C-Means Algorithm
- FCM Algorithm
- Step 1. Determine c and t, initialize and let , ().
- Step 2. Compute clustering centers () by Equation (24):
- Step 3. Update by Equation (25):
- Step 4. Compute ,
- IF , STOP
- ELSE , return to Step 2.
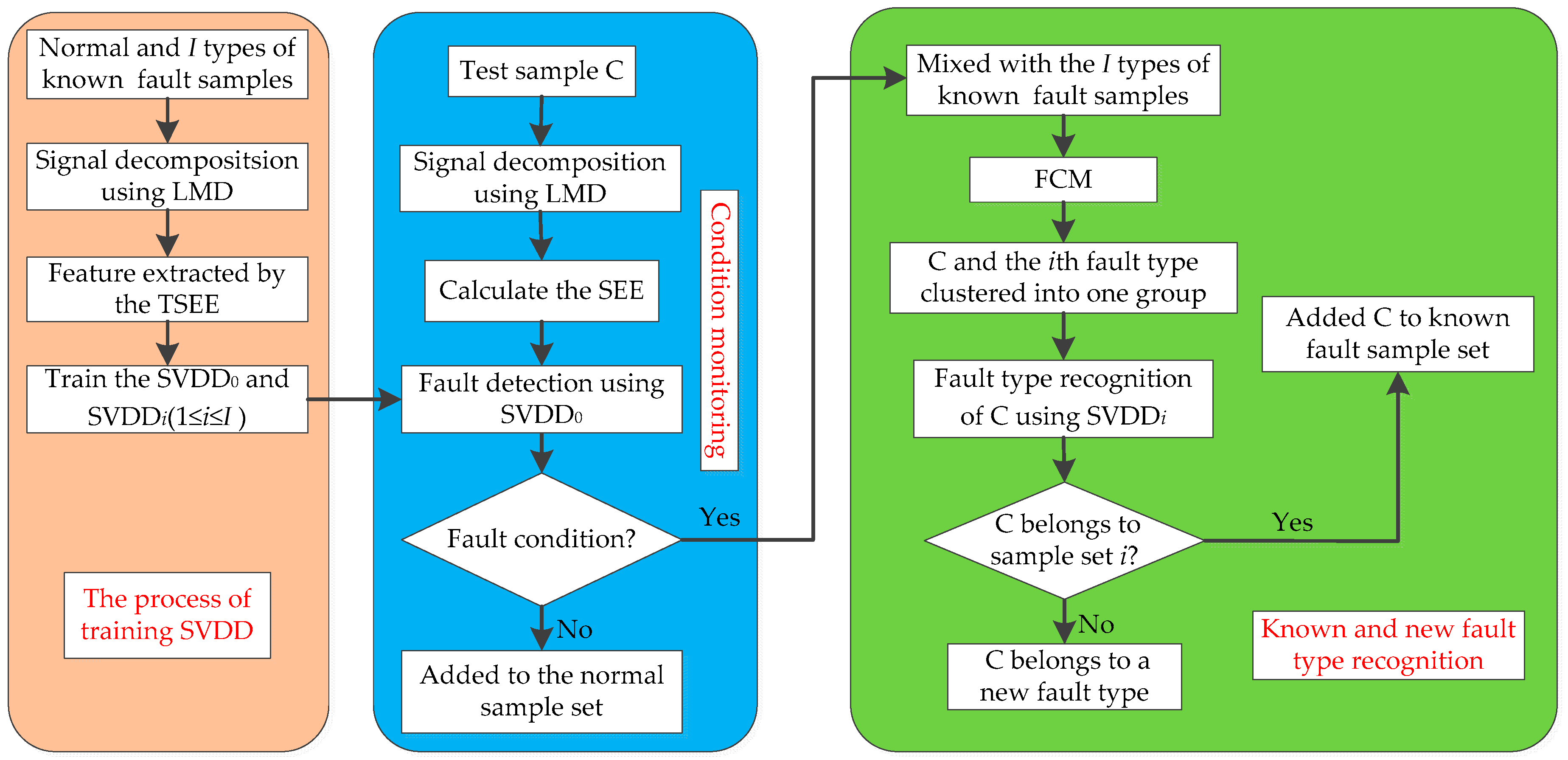
4.3. Fault Diagnosis Process of the New Method
- (1)
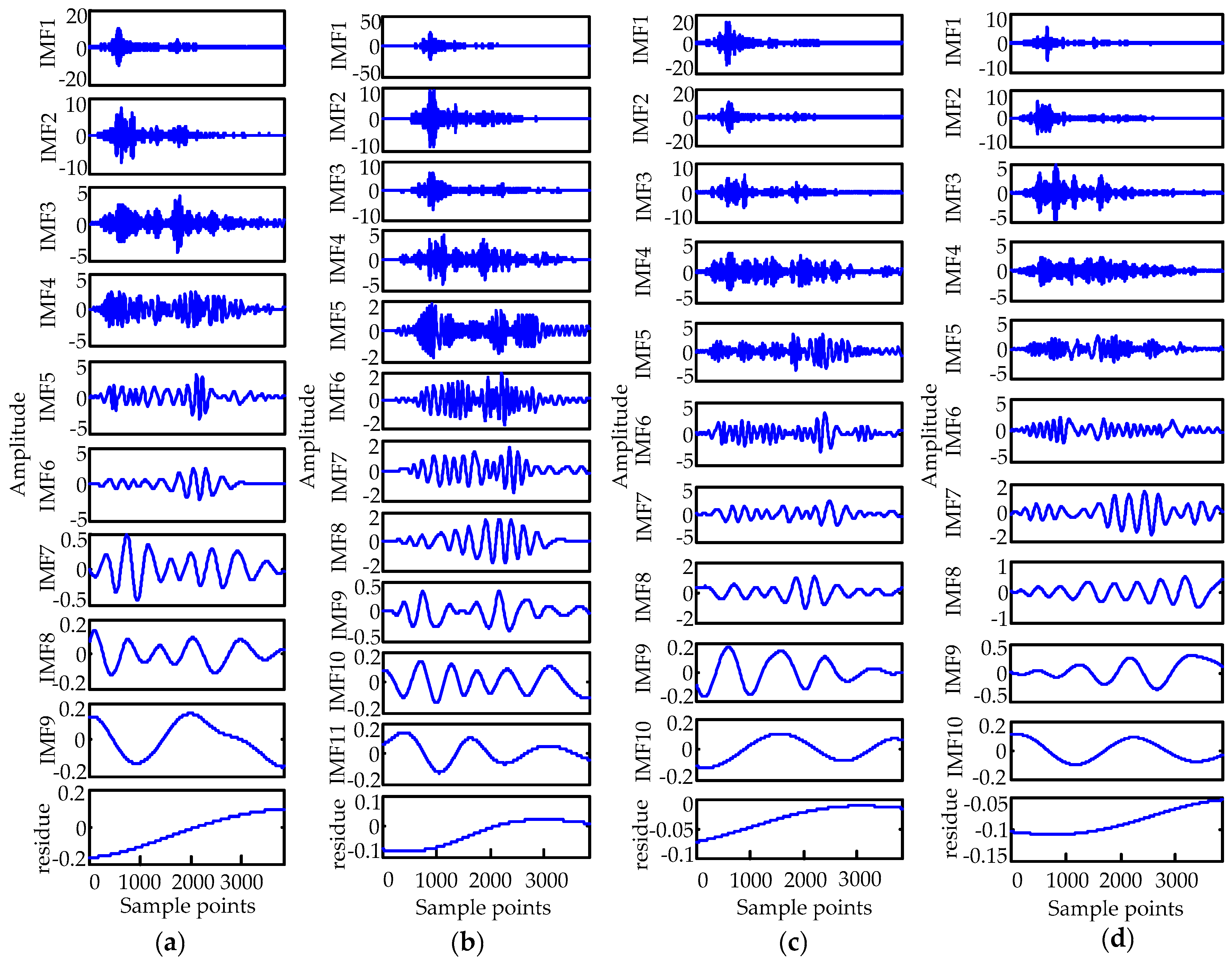
- LMD is used to decompose vibration signals of HVCBs into a series of PFs.
- (2)
- The first five PF components are chosen according to energy ratio to form a component matrix; the whole component matrix is then segmented into 30 equal time-domain sub-matrixes along the time axis. Each sub-matrix contains five time-frequency blocks. Then energy entropies of these sub-matrixes are extracted to compose the TSEE feature vector.
- (3)
- The normal samples are used to train the SVDD denoted as . Through , fault samples are determined. Subsequently, fault sample and I types of known fault samples are clustered using the FCM method with cluster number I, before the corresponding is chosen to judge whether the fault sample belongs to a new type or not. is trained with the type of known fault samples.
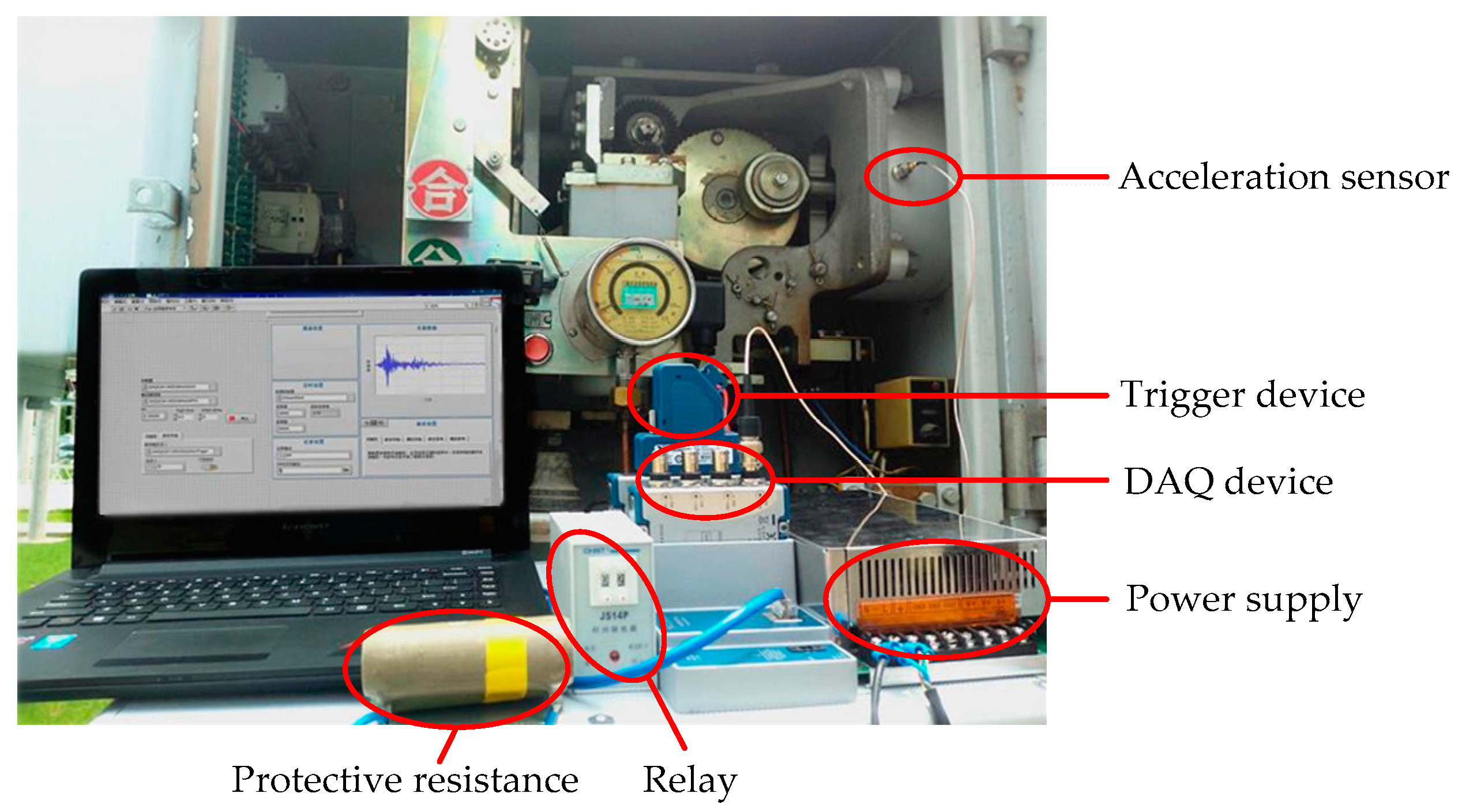
5. Experimental Results and Analysis
5.1. Performance Comparison between LMD and Empirical Mode Decomposition (EMD)
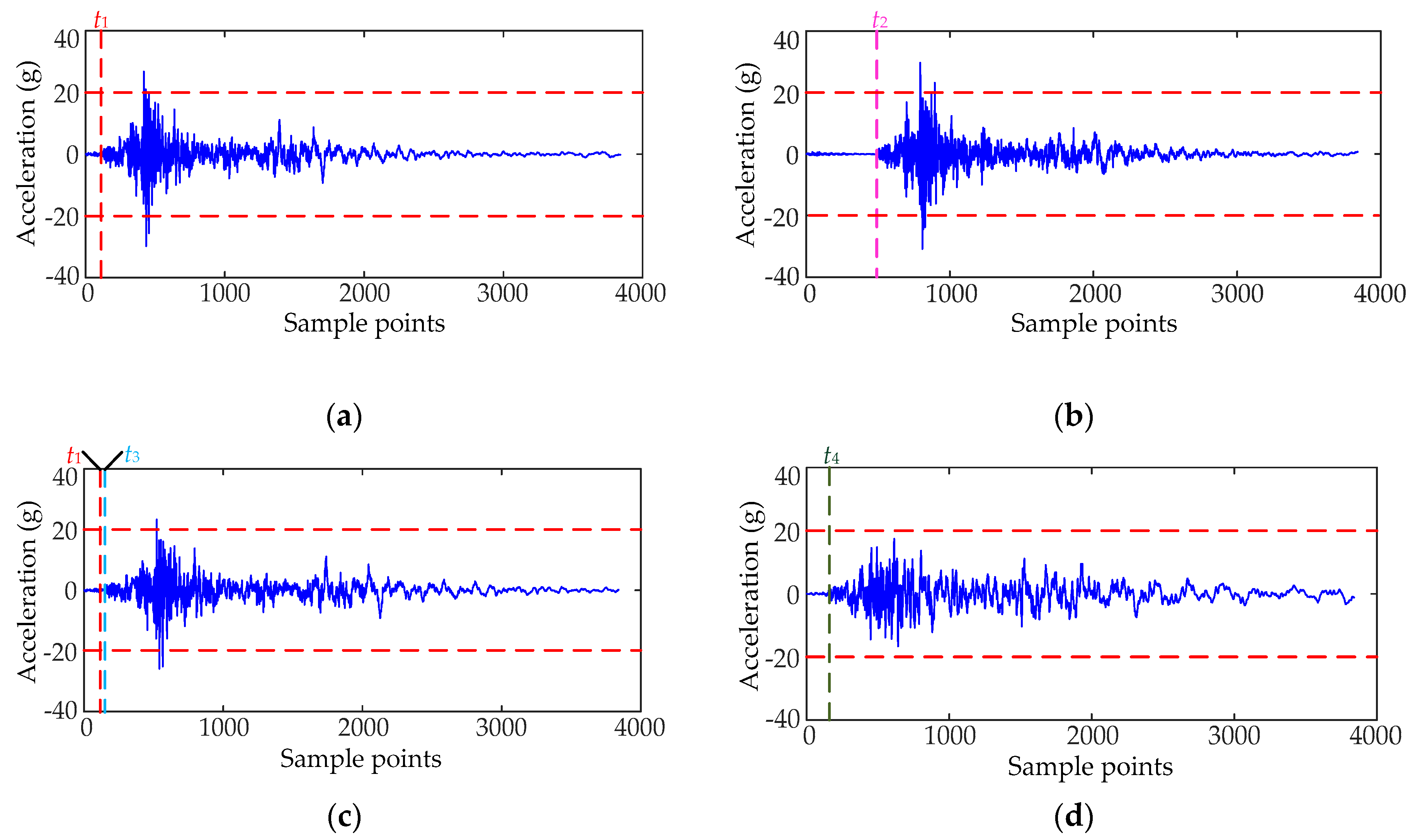
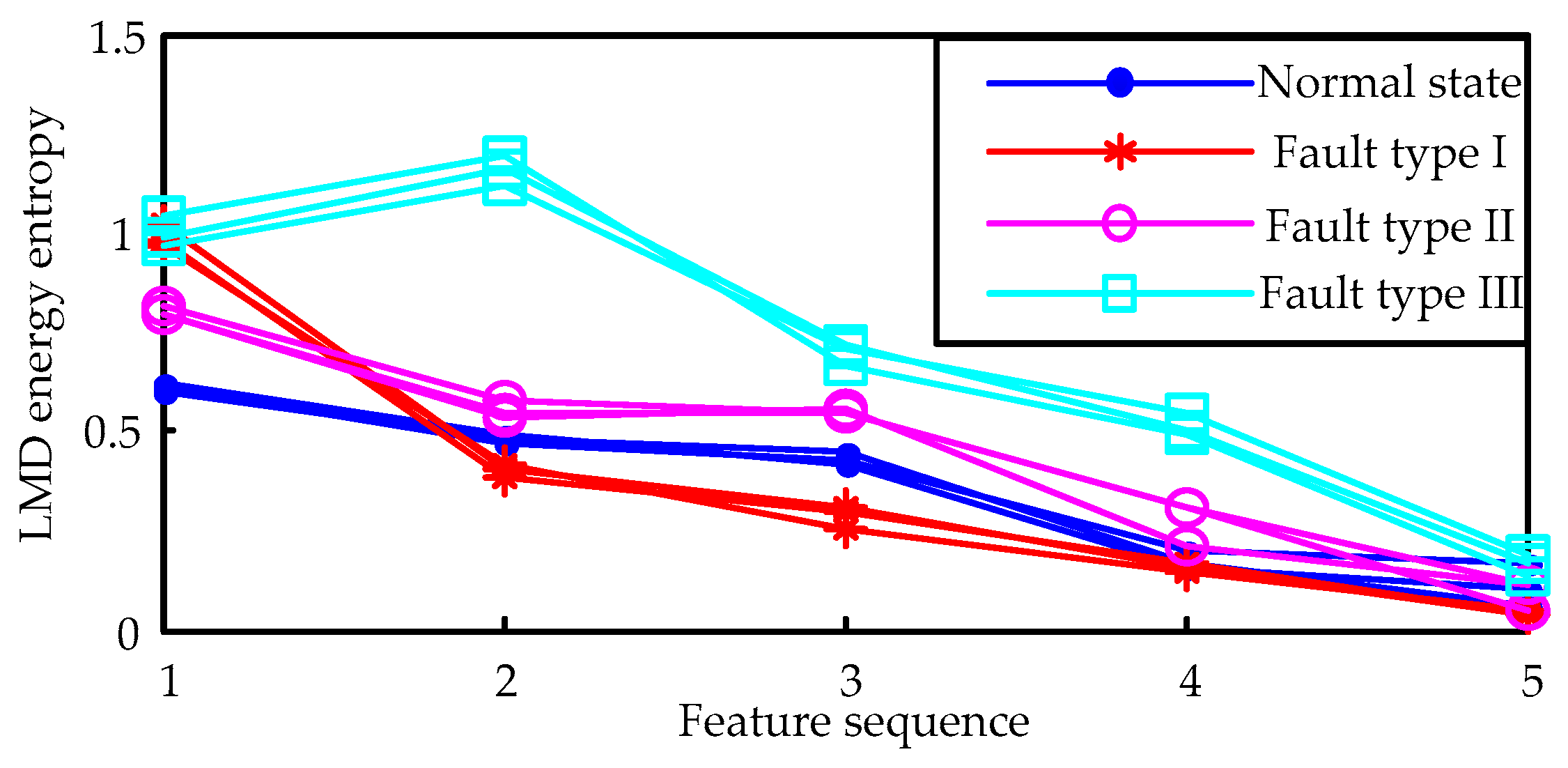
5.2. Feature Extraction of Measured Signals and Analysis
5.3. Fault Diagnosis Using Hybrid Classifier Based on SVDD and FCM
6. Conclusions
- (1)
- LMD is successfully used to process and analyze vibration signals of high-voltage circuit breakers (HVCBs) with great feature presentation ability and avoids the limitation of empirical mode decomposition (EMD) such as end effect, mode confusion and high time consumption.
- (2)
- The TSEE is extracted as the feature vectors. Compared to LMD energy entropy, it has high resolution time-frequency energy distribution character presentation ability especially, for time-delay fault diagnosis.
- (3)
- The hybrid classifier based on Support Vector Data Description (SVDD) and fuzzy c-means (FCM) not only detects the fault state accurately, but also determines whether fault samples belong to new fault types or not. Therefore, the new hybrid classifier can satisfy the high reliability requirements of the power system.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Landry, M.; Léonard, F.; Landry, C.; Beauchemin, R.; Turcotte, O.; Brikci, F. An improved vibration analysis algorithm as a diagnostic tool for detecting mechanical anomalies on power circuit breakers. IEEE Trans. Power Deliv. 2008, 23, 1986–1994. [Google Scholar] [CrossRef]
- Meng, Y.P.; Jia, S.L.; Shi, Z.Q.; Rong, M.Z. The detection of the closing moments of a vacuum circuit breaker by vibration analysis. IEEE Trans. Power Deliv. 2006, 21, 652–658. [Google Scholar] [CrossRef]
- Razi-Kazemi, A.A.; Vakilian, M.; Niayesh, K.; Lehtonen, M. Circuit-breaker automated failure tracking based on coil current signature. IEEE Trans. Power Deliv. 2014, 29, 283–290. [Google Scholar] [CrossRef]
- Hussain, A.; Lee, S.J.; Choi, M.S.; Brikci, F. An expert system for acoustic diagnosis of power circuit breakers and on-load tap changers. Expert Syst. Appl. 2015, 42, 9426–9433. [Google Scholar] [CrossRef]
- Huang, N.T.; Chen, H.J.; Zhang, S.X.; Cai, G.W.; Li, W.G.; Xu, D.G.; Fang, L.H. Mechanical faults diagnosis of high voltage circuit breakers based on wavelet time-frequency entropy and one-class support vector machine. Entropy 2016, 18, 7. [Google Scholar] [CrossRef]
- Runde, M.; Aurud, T.; Lundgaard, L.E.; Ottesen, G.E.; Faugstad, K. Acoustic diagnosis of high voltage circuit-breakers. IEEE Trans. Power Deliv. 1992, 7, 1306–1315. [Google Scholar] [CrossRef]
- Runde, M.; Ottesen, G.E.; Skyberg, B.; Ohlen, M. Vibration analysis for diagnostic testing of circuit-breakers. IEEE Trans. Power Deliv. 1996, 11, 1816–1823. [Google Scholar] [CrossRef]
- Liu, R.N.; Yang, B.Y.; Wang, S.B.; Chen, X.F. Time-frequency atoms-driven support vector machine method for bearings incipient fault diagnosis. Mech. Syst. Signal Process. 2016, 75, 345–370. [Google Scholar] [CrossRef]
- Ben, A.J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Liu, H.H.; Han, M.H. A fault diagnosis method based on local mean decomposition and multi-scale entropy for roller bearings. Mech. Mach. Theor. 2014, 75, 67–78. [Google Scholar] [CrossRef]
- Huang, J.; Hu, X.G.; Geng, X. An intelligent fault diagnosis method of high voltage circuit breaker based on improved EMD energy entropy and multi-class support vector machine. Electr. Power Syst. Res. 2011, 81, 400–407. [Google Scholar] [CrossRef]
- Han, M.H.; Pan, J.L. A fault diagnosis method combined with LMD, sample entropy and energy ratio for roller bearings. Measurement 2015, 76, 7–19. [Google Scholar] [CrossRef]
- Tian, Y.; Ma, J.; Lu, C.; Wang, Z.L. Rolling bearing fault diagnosis under variable conditions using LMD-SVD and extreme learning machine. Mech. Mach. Theor. 2015, 90, 175–186. [Google Scholar] [CrossRef]
- Huang, J.; Hu, X.G.; Yang, F. Support vector machine with genetic algorithm for machinery fault diagnosis of high voltage circuit breaker. Measurement 2011, 44, 1018–1027. [Google Scholar] [CrossRef]
- Sanchez, H.; Escobet, T.; Puig, V. Fault diagnosis of advanced wind turbine benchmark using interval-based ARRs and observers. IEEE Trans. Ind. Electron. 2015, 62, 3783–3793. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer. Automatica 2007, 43, 1605–1614. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Adaptive Sliding-Mode-Observer-Based fault reconstruction for nonlinear systems with parametric uncertainties. IEEE Trans. Ind. Electron. 2008, 55, 4029–4036. [Google Scholar]
- Gao, Z.W.; Cecati, S.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques-Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Lee, D.S.; Lithgow, B.J.; Morrison, R.E. New fault diagnosis of circuit breakers. IEEE Trans. Power Deliv. 2003, 18, 454–459. [Google Scholar] [CrossRef]
- Chen, J.L.; Li, Z.P.; Pan, J.; Chen, G.G.; Zi, Y.Y.; Yuan, J.; Chen, B.Q.; He, Z.J. Wavelet transform based on inner product in fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2016, 70–71, 1–35. [Google Scholar] [CrossRef]
- Eren, L.; Ünal, M.; Devaney, M.J. Harmonic analysis via wavelet packet decomposition using special elliptic half-band filters. IEEE Trans. Instrum. Meas. 2008, 56, 2289–2293. [Google Scholar] [CrossRef]
- Aktaibi, A.; Rahman, M.A.; Razali, A.M. An experimental implementation of the dq-Axis wavelet packet transform hybrid technique for three-phase power transformer protection. IEEE Trans. Appl. 2014, 50, 2919–2927. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 434–454. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.S.; Yang, Y. A rotating machinery fault diagnosis method based on local mean decomposition. Digit. Signal Process. 2012, 22, 356–366. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Zhou, J.Z. Multi-fault diagnosis for rolling element bearings based on ensemble empirical mode decomposition and optimized support vector machines. Mech. Syst. Signal Process. 2013, 41, 127–140. [Google Scholar] [CrossRef]
- Ge, M.; Xu, Y.S.; Du, R.X. An intelligent online monitoring and diagnostic system for manufacturing automation. IEEE Trans. Autom. Sci. Eng. 2008, 5, 127–138. [Google Scholar]
- Zin, A.A.M.; Saini, M.; Mustafa, M.W.; Sultan, A.R. Rahimuddin. New algorithm for detection and fault classification on parallel transmission line using DWT and BPNN based on Clarke’s transformation. Neurocomputing 2015, 168, 983–993. [Google Scholar]
- Cao, L.H.; Yu, J.W.; Li, Y. Study on the determination method of the normal value of relative internal efficiency of the last stage group of steam turbine. Energy 2016, 98, 101–107. [Google Scholar] [CrossRef]
- Tax, D.M.J.; Duin, R.P.W. Support vector domain description. Pattern Recognit. Lett. 1999, 20, 1191–1199. [Google Scholar] [CrossRef]
- Ban, O.I.; Ban, A.I.; Tuse, D.A. Importance-performance analysis by fuzzy c-means algorithm. Expert Syst. Appl. 2016, 50, 9–16. [Google Scholar] [CrossRef]
- Orhan, K.; Özge, T.; Eda, Ö. Fuzzy c-means clustering algorithm for directional data (FCM4DD). Expert Syst. Appl. 2016, 58, 76–82. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Li, G.N.; Hu, Y.P.; Chen, H.X.; Shen, L.M.; Li, H.R.; Hu, M.; Liu, J.Y.; Sun, K.Z. An improved fault detection method for incipient centrifugal chiller faults using the PCA-R-SVDD algorithm. Energy Build. 2016, 116, 104–113. [Google Scholar] [CrossRef]
- Huang, J.; Yan, X.F. Related and independent variable fault detection based on KPCA and SVDD. J. Process Control. 2016, 39, 88–99. [Google Scholar] [CrossRef]
- Du, W.L.; Tian, Y.; Qian, F. Monitoring for nonlinear multiple modes process based on LL-SVDD-MRDA. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1133–1148. [Google Scholar] [CrossRef]
- Lazzaretti, A.E.; Tax, D.M.J.; Neto, H.V.; Ferreira, V.H. Novelty detection and multi-class classification in power distribution voltage waveforms. Expert Syst. Appl. 2016, 45, 322–330. [Google Scholar] [CrossRef]
- Ren, D.Q.; Yang, S.X.; Wu, Z.T.; Yan, G.B. Evaluation of the EMD end effect and a window based method to improve EMD. In Proceedings of the Chinese Mechanical Engineering Society Annual Meeting and the First Annual Conference of the Chinese Academy of Engineering Machinery and Vehicle Engineering Department, Hangzhou, China, 6–7 November 2006; pp. 1568–1572.
- Fu, W.L.; Zhou, J.Z.; Li, C.S.; Xiao, H.; Xiao, J.; Zhu, W.L. Vibrate fault diagnosis for hydro-electric generating unit based on support vector data description improved with fuzzy K nearest neighbor. Proc. CSEE 2014, 34, 5788–5795. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decomposition Method | Average Number of Components | Average Decomposition Time/s | Average Evaluation Index θ |
|---|---|---|---|
| LMD | 8 | 0.076 | 0.235 |
| EMD | 11 | 0.242 | 0.389 |
| Classifier | Test Sample | Discriminant Result | State Discriminant Accuracy/% | |
|---|---|---|---|---|
| Normal State | Fault State | |||
| Normal state | 19 | 1 | 95 | |
| Fault type I | 0 | 20 | 100 | |
| Fault type III | 0 | 20 | 100 | |
| SVM | Normal state | 18 | 2 | 90 |
| Fault type I | 0 | 20 | 100 | |
| Fault type III | 3 | 17 | 85 | |
| BPNN | Normal state | 18 | 2 | 90 |
| Fault type I | 0 | 20 | 100 | |
| Fault type III | 4 | 16 | 80 | |
| Classifier | Test Sample | Discriminant Results | State Discriminant Accuracy/% | |
|---|---|---|---|---|
| Normal State | Fault State | |||
| Normal state | 16 | 4 | 80 | |
| Fault type I | 2 | 18 | 90 | |
| Fault type III | 1 | 19 | 95 | |
| SVM | Normal state | 14 | 6 | 70 |
| Fault type I | 7 | 13 | 65 | |
| Fault type III | 2 | 18 | 90 | |
| BPNN | Normal state | 15 | 5 | 75 |
| Fault type I | 9 | 11 | 55 | |
| Fault type III | 2 | 18 | 90 | |
| Classifier | Discriminant Results | State Discriminant Accuracy/% | |
|---|---|---|---|
| Normal State | Fault State | ||
| SVDD | 0 | 20 | 100 |
| SVM | 18 | 2 | 10 |
| BPNN | 19 | 1 | 5 |
| Classifier | Test | Diagnosis Results | Recognition | ||
|---|---|---|---|---|---|
| Sample | Fault Type I | Fault Type III | New Type | Accuracy/% | |
| Fault type I | 20 | 0 | 0 | 100 | |
| Hybrid Classifier | Fault type II | 0 | 0 | 20 | 100 |
| Fault type III | 0 | 20 | 0 | 100 | |
| Fault type I | 19 | 1 | 0 | 95 | |
| SVM | Fault type II | 0 | 20 | 0 | 0 |
| Fault type III | 2 | 18 | 0 | 90 | |
| Fault type I | 18 | 2 | 0 | 90 | |
| BPNN | Fault type II | 0 | 20 | 0 | 0 |
| Fault type III | 2 | 18 | 0 | 90 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, N.; Fang, L.; Cai, G.; Xu, D.; Chen, H.; Nie, Y. Mechanical Fault Diagnosis of High Voltage Circuit Breakers with Unknown Fault Type Using Hybrid Classifier Based on LMD and Time Segmentation Energy Entropy. Entropy 2016, 18, 322. https://doi.org/10.3390/e18090322
Huang N, Fang L, Cai G, Xu D, Chen H, Nie Y. Mechanical Fault Diagnosis of High Voltage Circuit Breakers with Unknown Fault Type Using Hybrid Classifier Based on LMD and Time Segmentation Energy Entropy. Entropy. 2016; 18(9):322. https://doi.org/10.3390/e18090322
Chicago/Turabian StyleHuang, Nantian, Lihua Fang, Guowei Cai, Dianguo Xu, Huaijin Chen, and Yonghui Nie. 2016. "Mechanical Fault Diagnosis of High Voltage Circuit Breakers with Unknown Fault Type Using Hybrid Classifier Based on LMD and Time Segmentation Energy Entropy" Entropy 18, no. 9: 322. https://doi.org/10.3390/e18090322