Noise Reduction Method of Underwater Acoustic Signals Based on Uniform Phase Empirical Mode Decomposition, Amplitude-Aware Permutation Entropy, and Pearson Correlation Coefficient


Abstract
:1. Introduction
2. Basic Theory
2.1. Uniform Phase Empirical Mode Decomposition (UPEMD)
- Step 1.
- Connect the local maxima/minima of to obtain the upper/lower envelope using the cubic spline.
- Step 2.
- Derive the local mean of envelope, , by averaging the upper and lower envelopes.
- Step 3.
- Extract the temporary local oscillation .
- Step 4.
- If satisfies some predefined stoppage criteria [8], is assigned as an IMF noted as where is the IMF index. Otherwise set and repeat Step 1 to Step 3.
- Step 5.
- Compute the residue .
- Step 6.
- Set and repeat Step 1 to Step 5 to extract the next IMF.
2.1.1. The Masking Signal EMD (MS-EMD)
- Step 1.
- A masking signal is constructed according to the frequency information of the original signal :
- Step 2.
- Compute ; Similarly, compute .
- Step 3.
- Obtain IMF1 by , and IMF2 by .
2.1.2. The Two-Level EMD (2L-UPEMD)
- Step 1.
- Assign , and .
- Step 2.
- Based on Equations (2) and (3), calculate the perturbed signal:
- Step 3.
- Perform EMD to obtain two IMFs, .
- Step 4.
- Repeat Step 2 to Step 3 for to .
- Step 5.
- Obtain the resultant IMF1 and IMF2 as .
2.1.3. The Multi-Level UPEMD
- Step 1.
- Assign , set and initial residue: .
- Step 2.
- Set , where stands for the standard deviation; and .
- Step 3.
- Perform the 2L-UPEMD to obtain the IMF , that is .
- Step 4.
- Calculate residue .
- Step 5.
- Repeat Step 2 to Step 5 for to to extract all IMFs.
2.2. Amplitude-Aware Permutation Entropy (AAPE)
2.3. Pearson Correlation Coefficient (PCC)
3. The Proposed Noise Reduction Method
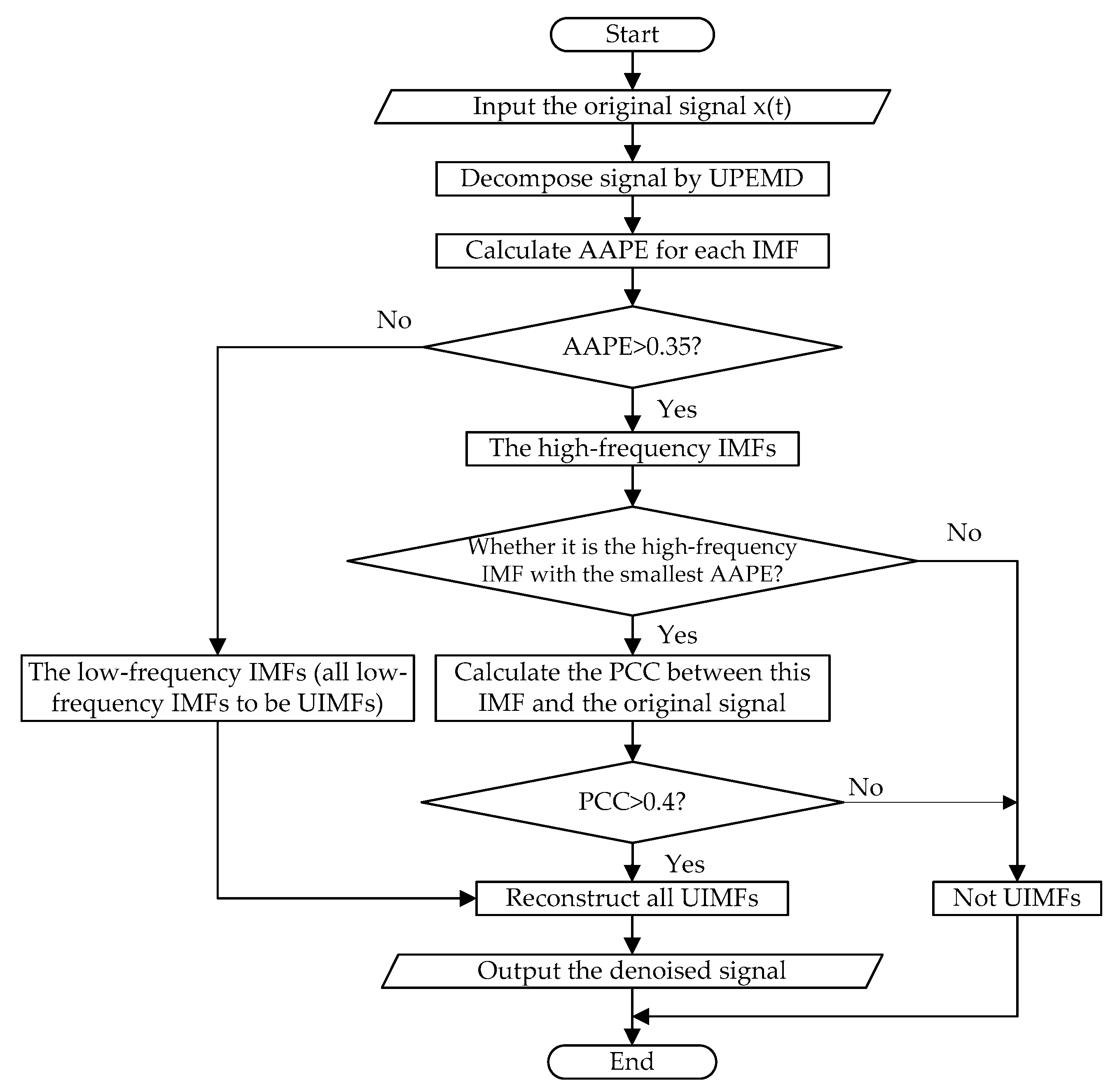
3.1. The Proposed Noise Reduction Method
- Step 1.
- Decompose the original signal using UPEMD.
- Step 2.
- Calculate the AAPE of each IMF.
- Step 3.
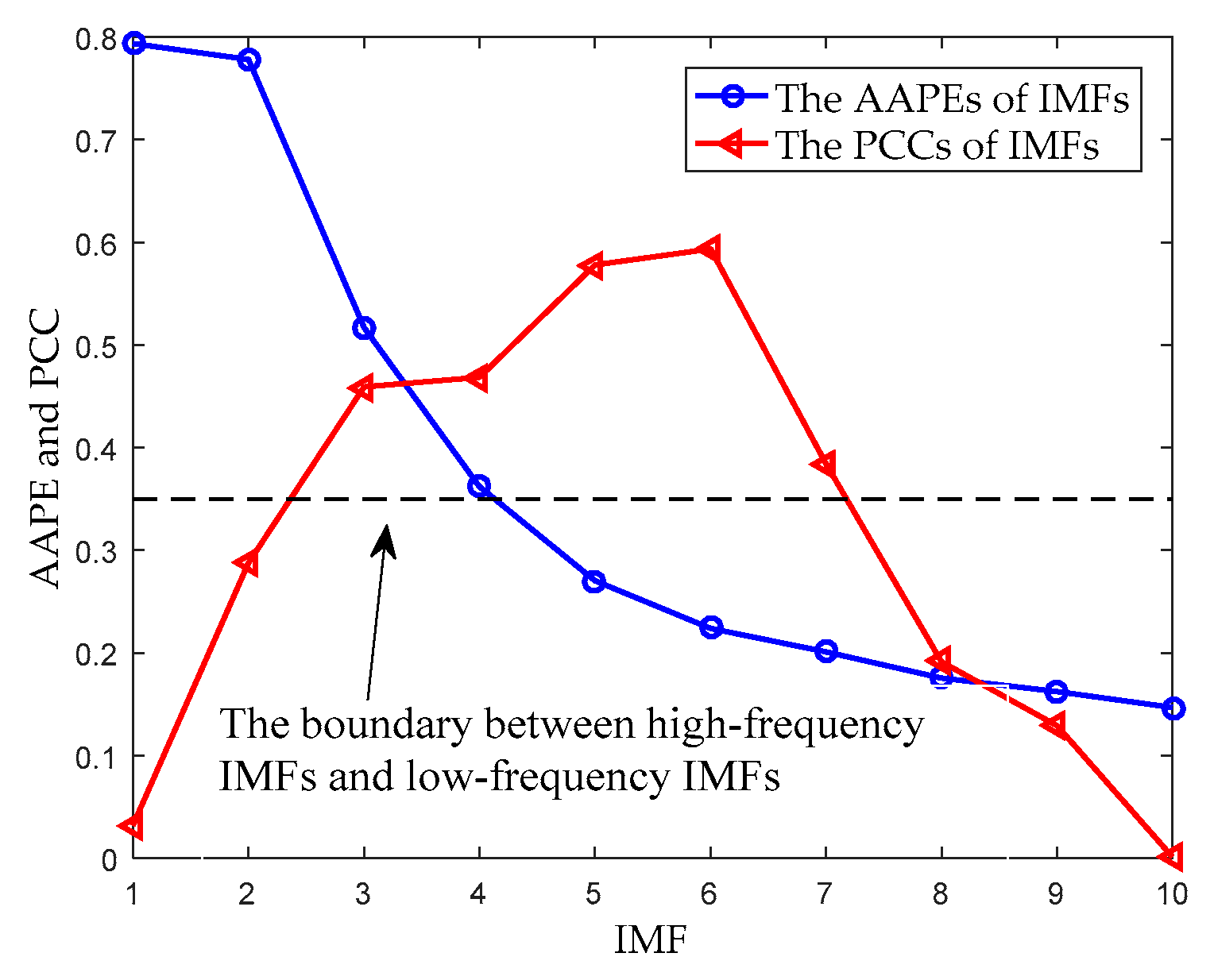
- Determine the threshold of AAPE. These IMFs, where AAPE is less than a given threshold, are determined as low-frequency IMF (all low-frequency IMFs to be UIMFs). The remaining IMFs are determined as high-frequency IMFs. When the embedded dimension of AAPE is 5, it is appropriate to set the threshold to 0.35, which will be proved in Section 4.1.
- Step 4.
- Calculate PCC between the high-frequency IMF with the smallest AAPE and the original signal. If PCC is greater than 0.4, the IMF is also determined as a UIMF.
- Step 5.
- Reconstruct all UIMFs. After the reconstruction, the process of noise reduction is completed.
3.2. Evaluation Criteria for Chaotic Signal Noise Reduction
3.3. Evaluation Criteria for Underwater Acoustic Signals Noise Reduction
3.3.1. Noise Intensity
3.3.2. Correlation Dimension
3.3.3. Spatial-Dependence Recurrence Sample Entropy (SdrSampEn)
4. The Chaotic Signal Denoising Experiment
4.1. Choice the Threshold of AAPE
4.2. Denoising for Noisy Chaotic Signal
5. The Underwater Acoustic Signals Denoising Experiment
5.1. Data Collection
5.2. Denoising for Underwater Acoustic Signals
6. Conclusions
- (1)
- UPEMD, as a new adaptive decomposition algorithm, is first used in the noise reduction of underwater acoustic signals.
- (2)
- A simulation experiment shows that AAPE can reflect the amplitude information of the signal compared with PE. Consequently, AAPE is used to measure the complexity of IMF in this paper.
- (3)
- Quantitative comparisons based on the noisy chaotic signals demonstrate that the proposed method performs better than the EMD-AAPE-PCC and the ESMD-AAPE-PCC method by providing lower RMSE and higher SNR value.
- (4)
- Through the noise reduction experiments of three types of underwater acoustic signals, it is proved that the proposed method can further eliminate the noise and recover the true dynamic characteristics of the chaotic signal more clearly, which lays a foundation for the study of the detection, feature extraction and classification of underwater acoustic signals.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, H.; Li, Y.A.; Li, G.H. Noise reduction method of ship radiated noise with ensemble empirical mode decomposition of adaptive noise. Noise Control Eng. J. 2016, 64, 230–242. [Google Scholar]
- Wang, X.F.; Qu, J.L.; Gao, F.G.; Zhou, Y.P.; Zhang, X.Y. A chaotic signal denoising method developed on the basis of noise-assisted nonuniformly sampled bivariate empirical mode decomposition. Acta Phys. Sin. 2014, 63, 170203. [Google Scholar]
- Li, Y.X.; Li, Y.A.; Chen, X.; Yu, J. Research on ship-radiated noise denoising using secondary variational mode decomposition and correlation coefficient. Sensors 2018, 18, 48. [Google Scholar]
- Chen, Z.; Li, Y.A.; Liang, H.T.; Yu, J. Hierarchical cosine similarity entropy for feature extraction of ship-radiated noise. Entropy 2018, 20, 425. [Google Scholar] [CrossRef]
- Shashidhar, S.; Li, Y.A.; Guo, X.J.; Chen, X.; Zhang, Q.F.; Yang, K.D.; Yang, Y.X. A complexity-based approach for the detection of weak signals in ocean ambient noise. Entropy 2016, 18, 101. [Google Scholar]
- Li, Y.X.; Li, Y.A.; Chen, Z.; Chen, X. Feature extraction of ship-radiated noise based on permutation entropy of the intrinsic mode function with the highest energy. Entropy 2016, 18, 393. [Google Scholar] [CrossRef]
- Yang, H.; Li, G.H. Noise reduction of chaotic signal based on empirical mode decomposition. Telkomnika Indones. J. Electr. Eng. 2014, 12, 1881–1886. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.A.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Deering, R.; Kaiser, J.F. The use of a masking signal to improve empirical mode decomposition. In Proceedings of the 2005 IEEE International Conference on Acoustics, Speech and Signal (ICASSP), Philadelphia, PA, USA, 23 March 2005; pp. 485–488. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, J.L.; Li, Z.J. Extreme-point symmetric mode decomposition method for data analysis. Adv. Adapt. Data Anal. 2013, 5, 1350015. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Iatsenko, D.; Mcclintock, P.V.; Stefanovska, A. Nonlinear mode decomposition: A noise-robust, adaptive decomposition method. Phys. Rev. E 2012, 92, 032916. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wei, Q.; Zhao, L.; Yu, T.; Han, R. An improved empirical mode decomposition method using second generation wavelets interpolation. Digit. Signal Process. 2018, 79, 164–167. [Google Scholar] [CrossRef]
- Wang, Y.H.; Hu, K.; Lo, M.T. Uniform phase empirical mode decomposition: An optimal hybridization of masking signal and ensemble approaches. IEEE Access 2018, 6, 34819–34833. [Google Scholar] [CrossRef]
- Pincus, S.M. Approximate entropy (ApEn) as a complexity measure. Chaos 1995, 5, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Kosko, B. Fuzzy entropy and conditioning. Inf. Sci. 1986, 40, 165–174. [Google Scholar] [CrossRef]
- Lake, D.E.; Richman, J.S.; Griffin, M.P.; Moorman, J.R. Sample entropy analysis of neonatal heart rate variability. Am. J. Physiol. Regul. Integr. Comp. Physiol. 2002, 283, 789. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Fadlallah, B.; Chen, B.; Keil, A.; Príncipe, J. Weighted-permutation entropy: A complexity measure for time series incorporating amplitude information. Phys. Rev. E 2013, 87, 022911. [Google Scholar] [CrossRef]
- Zunino, L.; Olivares, F.; Rosso, O.A. Permutation min-entropy: An improved quantifier for unveiling subtle temporal correlations. EPL 2015, 109, 10005. [Google Scholar] [CrossRef] [Green Version]
- Azami, H.; Escudero, J. Amplitude-aware permutation entropy: Illustration in spike detection and signal segmentation. Comput. Meth. Programs Biomed. 2016, 128, 40–51. [Google Scholar] [CrossRef] [Green Version]
- Figlus, T.; Gnap, J.; Skrúcaný, T.; Šarkan, B.; Stoklosa, J. The use of denoising and analysis of the acoustic signal entropy in diagnosing engine valve clearance. Entropy 2016, 18, 253. [Google Scholar] [CrossRef]
- Figlus, T.; Štefan, L.; Wilk, A.; Łazarz, B. Condition monitoring of engine timing system by using wavelet packet decomposition of a acoustic signal. J. Mech. Sci. Technol. 2014, 28, 1663–1671. [Google Scholar] [CrossRef]
- An, X.; Yang, J. Denoising of hydropower unit vibration signal based on variational mode decomposition and approximate entropy. Trans. Inst. Meas. Control 2016, 38, 282–292. [Google Scholar] [CrossRef]
- Jiang, F.; Zhu, Z.C.; Li, W.; Ren, Y.; Zhou, G.B.; Chang, Y.G. A fusion feature extraction method using EEMD and correlation coefficient analysis for bearing fault diagnosis. Appl. Sci. 2018, 8, 1621. [Google Scholar] [CrossRef]
- Tian, X.; Li, Y.; Zhou, H.; Li, X.; Chen, L.; Zhang, X. Electrocardiogram signal denoising using extreme-point symmetric mode decomposition and nonlocal means. Sensors 2016, 16, 1584. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.X.; Liu, S.Z.; Heng, J.N.; Gao, Y.Y. A new hybrid approach for wind speed forecasting applying uupport vector machine with ensemble empirical mode decomposition and cuckoo search algorithm. Appl. Sci. 2018, 8, 1754. [Google Scholar] [CrossRef]
- Xiao, M.; Wen, K.; Zhang, C.; Zhao, X.; Wu, D. Research on fault feature extraction method of rolling bearing based on NMD and wavelet threshold denoising. Shock Vib. 2018, 3, 1–11. [Google Scholar] [CrossRef]
- Zhan, L.; Li, C. A comparative study of empirical mode decomposition-based filtering for impact signal. Entropy 2016, 19, 13. [Google Scholar] [CrossRef]
- Li, Y.X.; Li, Y.A.; Chen, X.; Yu, J.; Yang, H.; Wang, L. A new underwater acoustic signal denoising technique based on CEEMDAN, mutual information, permutation entropy, and wavelet threshold denoising. Entropy 2018, 20, 563. [Google Scholar] [CrossRef]
- Ma, Z.; Guo, S.; Li, Y. A noise suppression scheme with EEMD based on angle cosine and fuzzy threshold. Chin. J. Sens. Actuators 2016, 29, 872–879. [Google Scholar]
- Bi, F.; Li, L.; Zhang, J.; Ma, T. Source identification of gasoline engine noise based on continuous wavelet transform and EEMD-RobustICA. Appl. Acoust. 2015, 100, 34–42. [Google Scholar] [CrossRef]
- García-Martínez, B.; Martínez-Rodrigo, A.; Zangróniz, R.; Pastor, J.M.; Alcaraz, R. Symbolic analysis of brain dynamics detects negative stress. Entropy 2017, 19, 196. [Google Scholar] [CrossRef]
- Murari, A.; Lungaroni, M.; Peluso, E.; Gaudio, P.; Lerche, E.; Garzotti, L.; Gelfusa, M. On the use of transfer entropy to investigate the time horizon of causal influences between signals. Entropy 2018, 20, 627. [Google Scholar] [CrossRef]
- Wang, W.B.; Zhang, X.D.; Wang, X.L. Chaotic signal denoising method based on independent component analysis and empirical mode decomposition. Acta Phys. Sin. 2013, 62, 050201. [Google Scholar]
- Huang, S.; Yin, J.; Sun., Z.; Li, S.; Zhou, T. Characterization of gas–liquid two-phase flow by correlation dimension of vortex-induced pressure fluctuation. IEEE Access 2017, 5, 10307–10314. [Google Scholar] [CrossRef]
- Pham, T.D.; Yan, H. Spatial-dependence recurrence sample entropy. Physica A 2017, 494, 581–590. [Google Scholar] [CrossRef]
- Dori, G.; Fishman, S.; Ben-Haim, S.A. The correlation dimension of rat hearts in an experimentally controlled environment. Chaos 2000, 10, 257–267. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | |||
|---|---|---|---|
| PE | 0.6513 | 0.6513 | 0.6513 |
| AAPE | 0.6879 | 0.7214 | 0.6403 |
| Parameter | No Correlation | Weak Correlation | Moderate Correlation | Strong Correlation |
|---|---|---|---|---|
| PCC | 0~0.1 | 0.1~0.3 | 0.3~0.5 | 0.5~1 |
| Method | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 |
|---|---|---|---|---|---|---|---|---|---|---|
| EMD | 0.8990 | 0.7361 | 0.5074 | 0.2929 | 0.2236 | 0.1896 | 0.1642 | 0.1621 | 0.1512 | / |
| ESMD | 0.9230 | 0.7038 | 0.4938 | 0.2810 | 0.2185 | 0.1932 | 0.1742 | 0.1600 | 0.1533 | / |
| UPEMD | 0.8681 | 0.7870 | 0.5886 | 0.3978 | 0.2704 | 0.2188 | 0.1895 | 0.1737 | 0.1614 | 0.1506 |
| Chaotic Signal | SNR/dB | EMD-AAPE-PCC | ESMD-AAPE-PCC | UPEMD-AAPE-PCC | |||
|---|---|---|---|---|---|---|---|
| SNR/dB | RMSE | SNR/dB | RMSE | SNR/dB | RMSE | ||
| Lorenz signal | 5 | 13.7972 | 1.5807 | 13.3847 | 1.6575 | 15.6321 | 1.2797 |
| 10 | 19.5190 | 0.8180 | 19.2559 | 0.8431 | 21.0471 | 0.6860 | |
| 15 | 23.3469 | 0.5264 | 21.8157 | 0.6279 | 25.5440 | 0.4088 | |
| 20 | 26.2986 | 0.3748 | 26.1920 | 0.3794 | 29.1438 | 0.2701 | |
| Rossler signal | 5 | 13.8541 | 0.9662 | 14.4716 | 0.8999 | 17.3298 | 0.6475 |
| 10 | 18.5442 | 0.5630 | 18.4306 | 0.5705 | 20.7218 | 0.4382 | |
| 15 | 23.9379 | 0.3026 | 22.9977 | 0.3372 | 26.1470 | 0.2346 | |
| 20 | 28.6691 | 0.1755 | 28.8895 | 0.1711 | 30.4150 | 0.1435 | |
| Duffing signal | 5 | 13.6513 | 0.4619 | 13.9917 | 0.4442 | 17.0769 | 0.3114 |
| 10 | 18.6499 | 0.2598 | 18.6051 | 0.2611 | 20.4668 | 0.2108 | |
| 15 | 22.5043 | 0.1667 | 21.6795 | 0.1833 | 24.1256 | 0.1383 | |
| 20 | 18.6596 | 0.2595 | 26.5844 | 0.1042 | 26.9542 | 0.0999 | |
| Underwater Acoustic Signals | Status | Noise Intensity | Correlation Dimension | SdrSampEn |
|---|---|---|---|---|
| The Ship-I | Before noise reduction | 0.2318 | 2.1261 | 1.7626 |
| After noise reduction | 0.2034 | 1.5841 | 0.5991 | |
| The Ship-II | Before noise reduction | 0.2105 | 2.5325 | 2.9703 |
| After noise reduction | 0.1799 | 1.8446 | 1.1416 | |
| The Ship-III | Before noise reduction | 0.2561 | 1.9459 | 0.9726 |
| After noise reduction | 0.2388 | 1.2441 | 0.3647 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Yang, Z.; Yang, H. Noise Reduction Method of Underwater Acoustic Signals Based on Uniform Phase Empirical Mode Decomposition, Amplitude-Aware Permutation Entropy, and Pearson Correlation Coefficient. Entropy 2018, 20, 918. https://doi.org/10.3390/e20120918
Li G, Yang Z, Yang H. Noise Reduction Method of Underwater Acoustic Signals Based on Uniform Phase Empirical Mode Decomposition, Amplitude-Aware Permutation Entropy, and Pearson Correlation Coefficient. Entropy. 2018; 20(12):918. https://doi.org/10.3390/e20120918
Chicago/Turabian StyleLi, Guohui, Zhichao Yang, and Hong Yang. 2018. "Noise Reduction Method of Underwater Acoustic Signals Based on Uniform Phase Empirical Mode Decomposition, Amplitude-Aware Permutation Entropy, and Pearson Correlation Coefficient" Entropy 20, no. 12: 918. https://doi.org/10.3390/e20120918