A Novel Fault Diagnosis Method of Rolling Bearings Based on AFEWT-KDEMI


Abstract
:1. Introduction
2. Adaptive Filtering Empirical Wavelet Transform
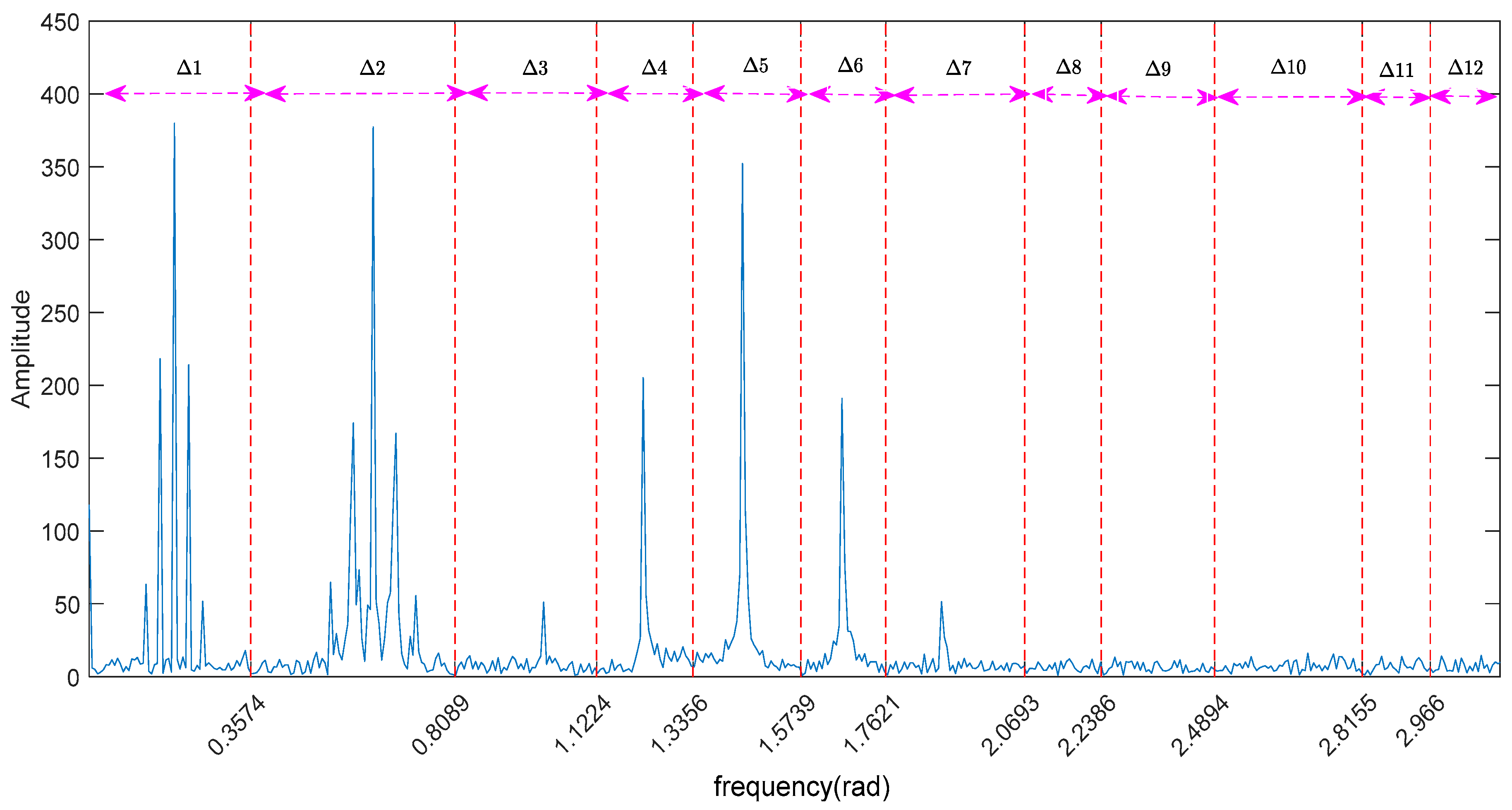
2.1. EWT Principle
2.2. The Basic Steps of AFEWT
- (1)
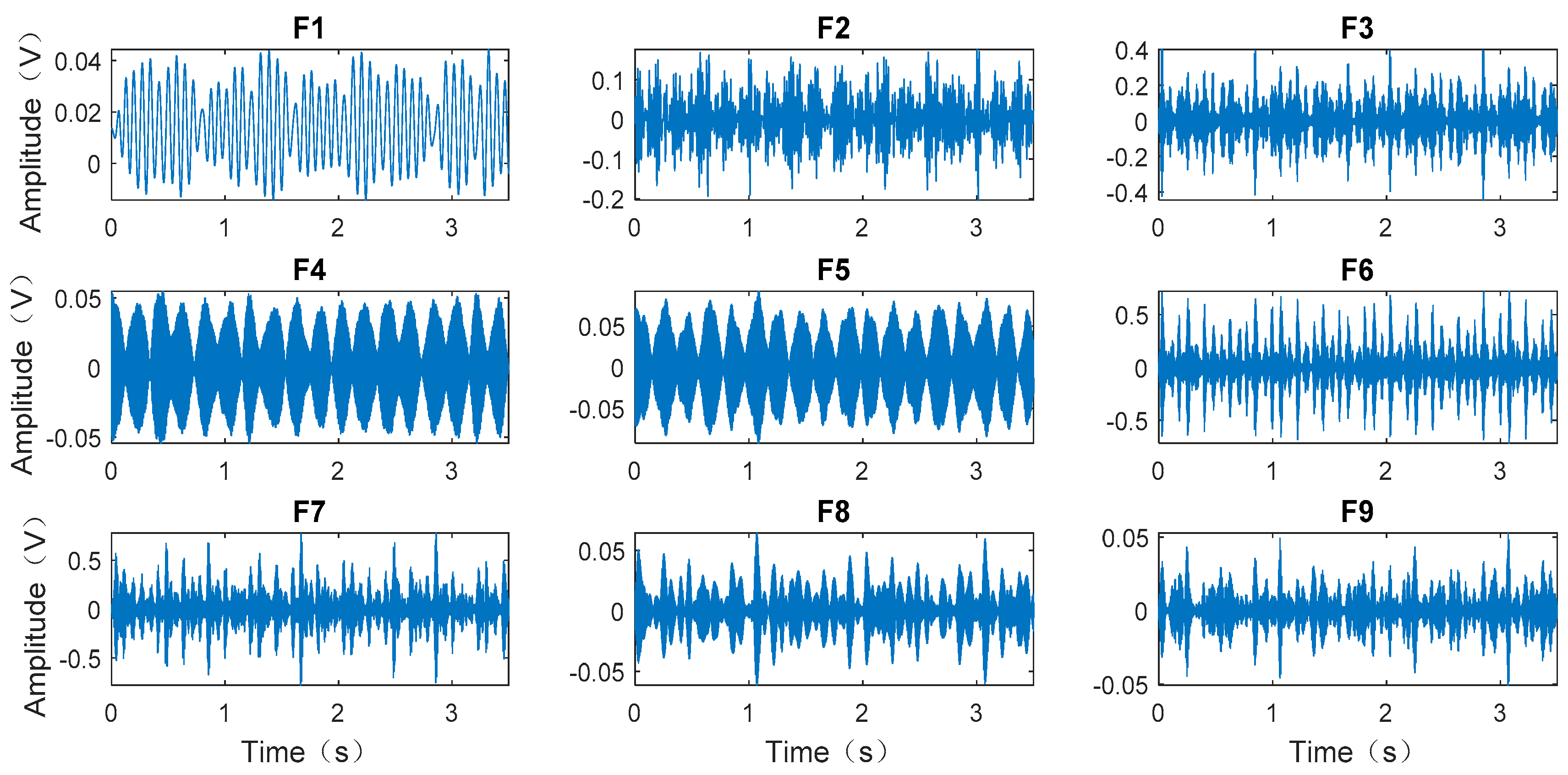
- EWT decomposition of the signal is performed to obtain mode components;
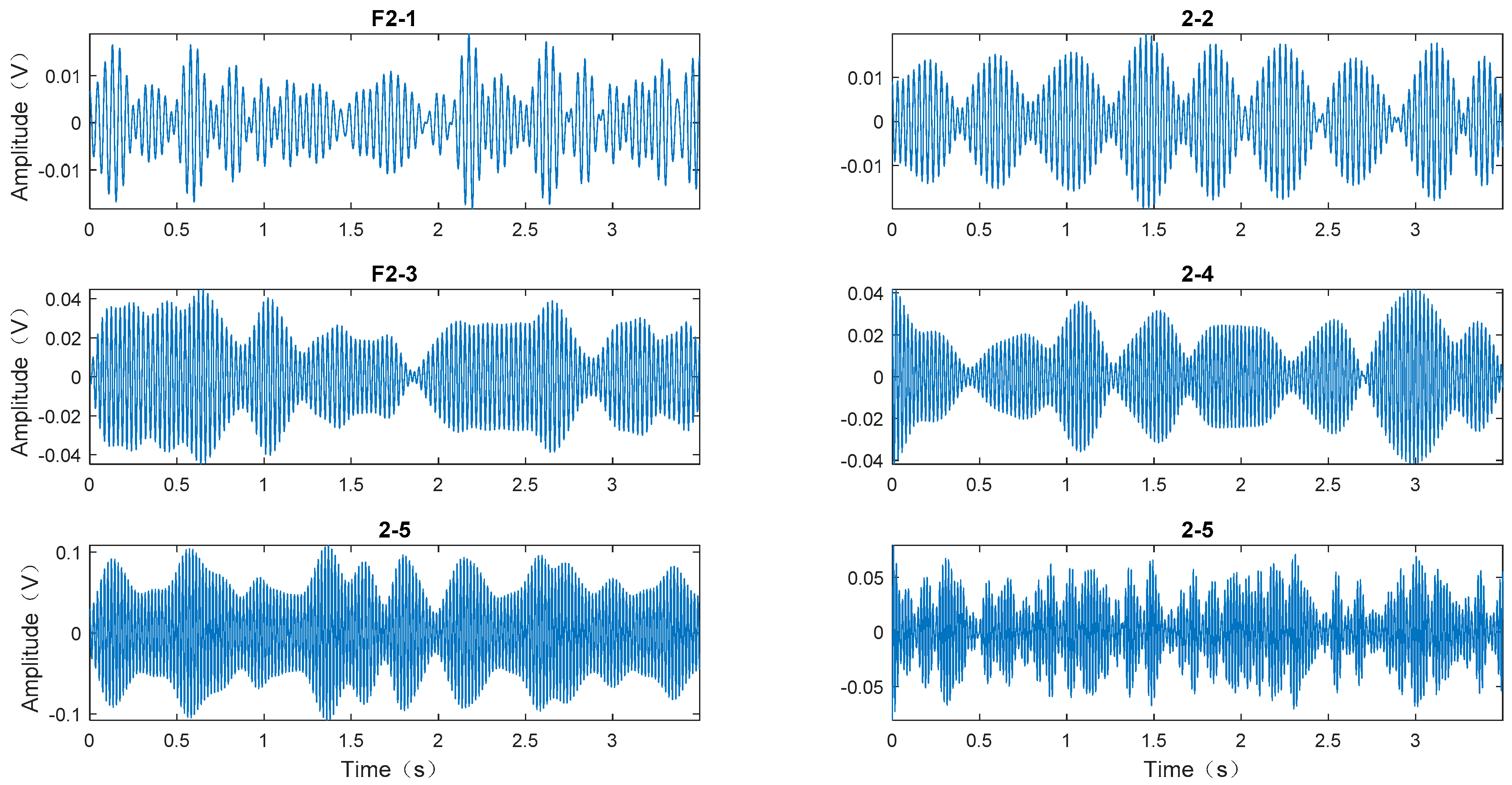
- (2)
- The second EWT decomposition is conducted for each mode to obtain sub-modes;
- (3)
- Hypothesis test of Gaussian distribution with 95% confidence interval is conducted for each sub-mode. The sub-modes do not satisfy Gaussian distribution, which means that useful signals are dominant and need to be preserved. Otherwise, the sub-modes are regarded as Gaussian noise and should be filtered out;
- (4)
- The mode is constructed based on the result of step (3), and then the signal can be reconstructed.
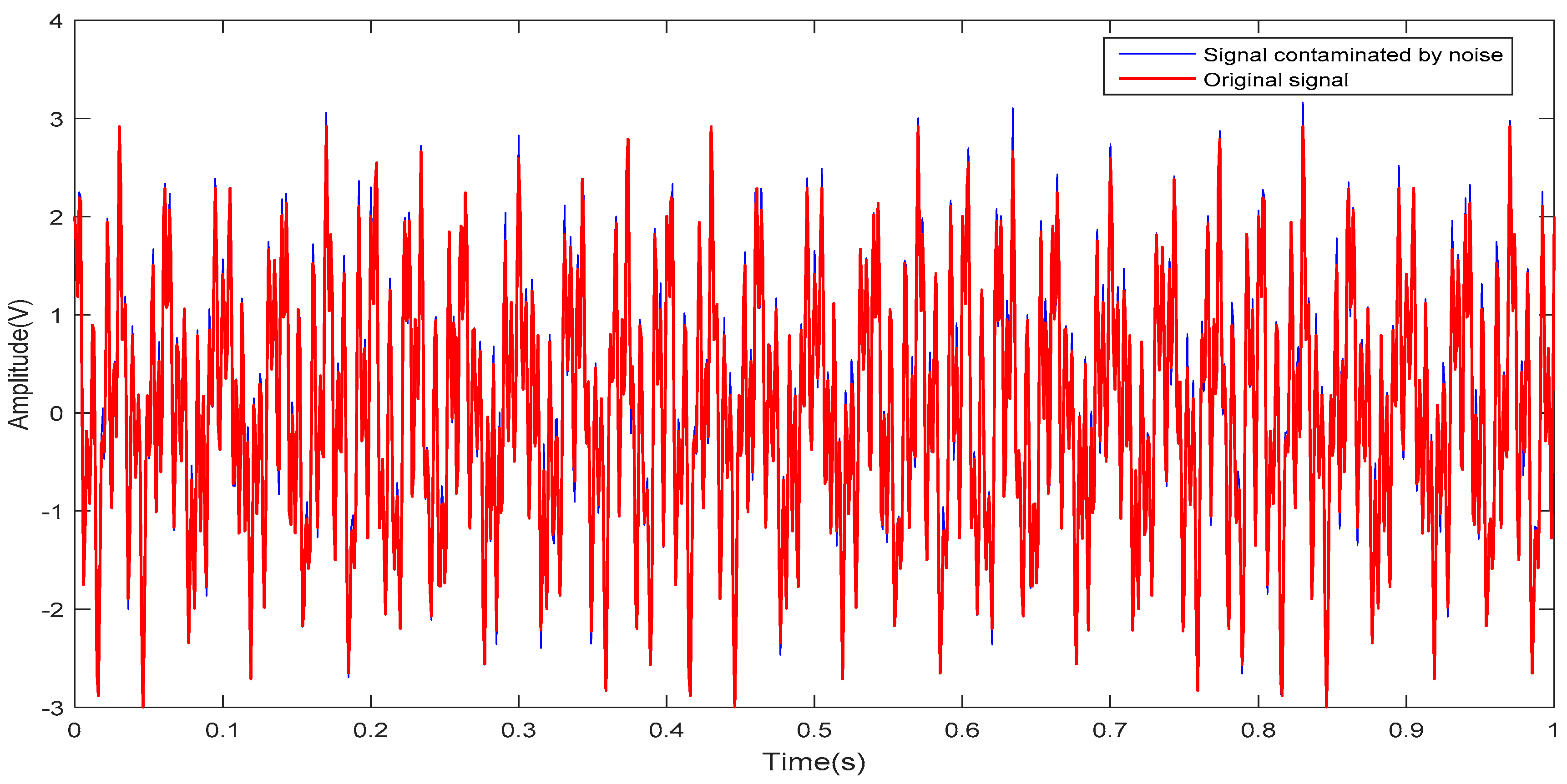
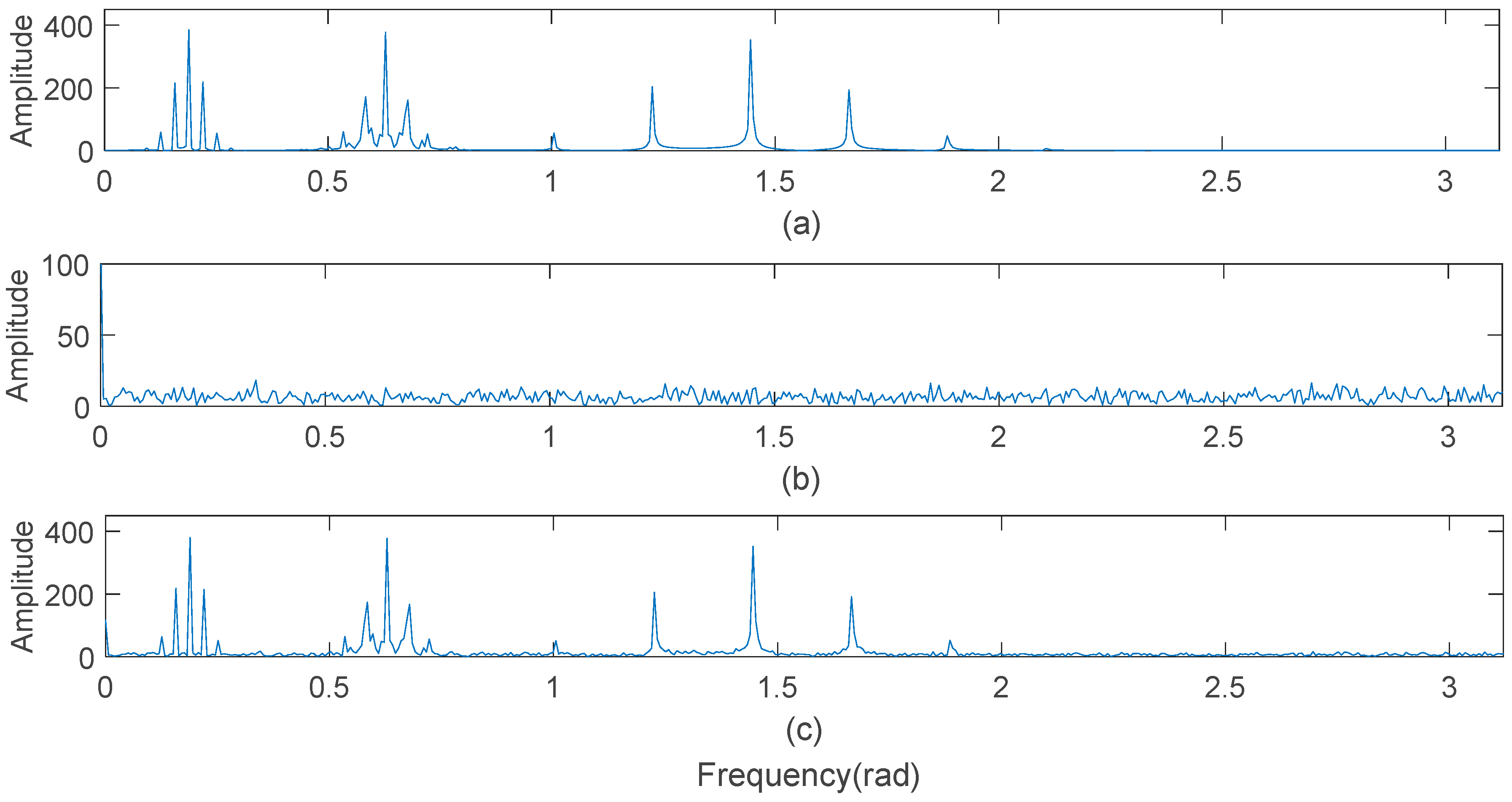
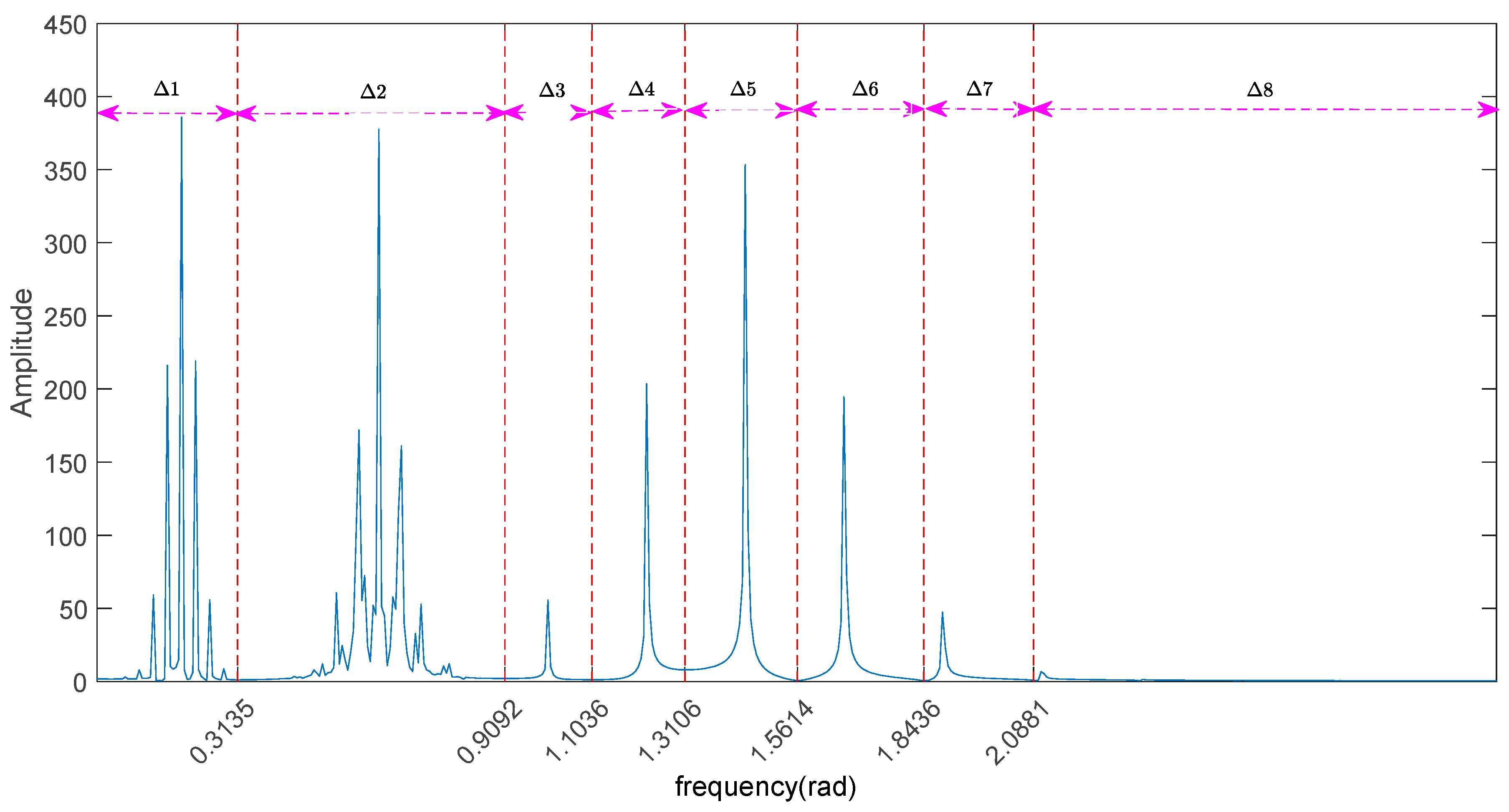
2.3. Simulation of AFEWT
3. KDEMI Classifier
3.1. Basic Principles of Kernel Density Estimation and Mutual Information
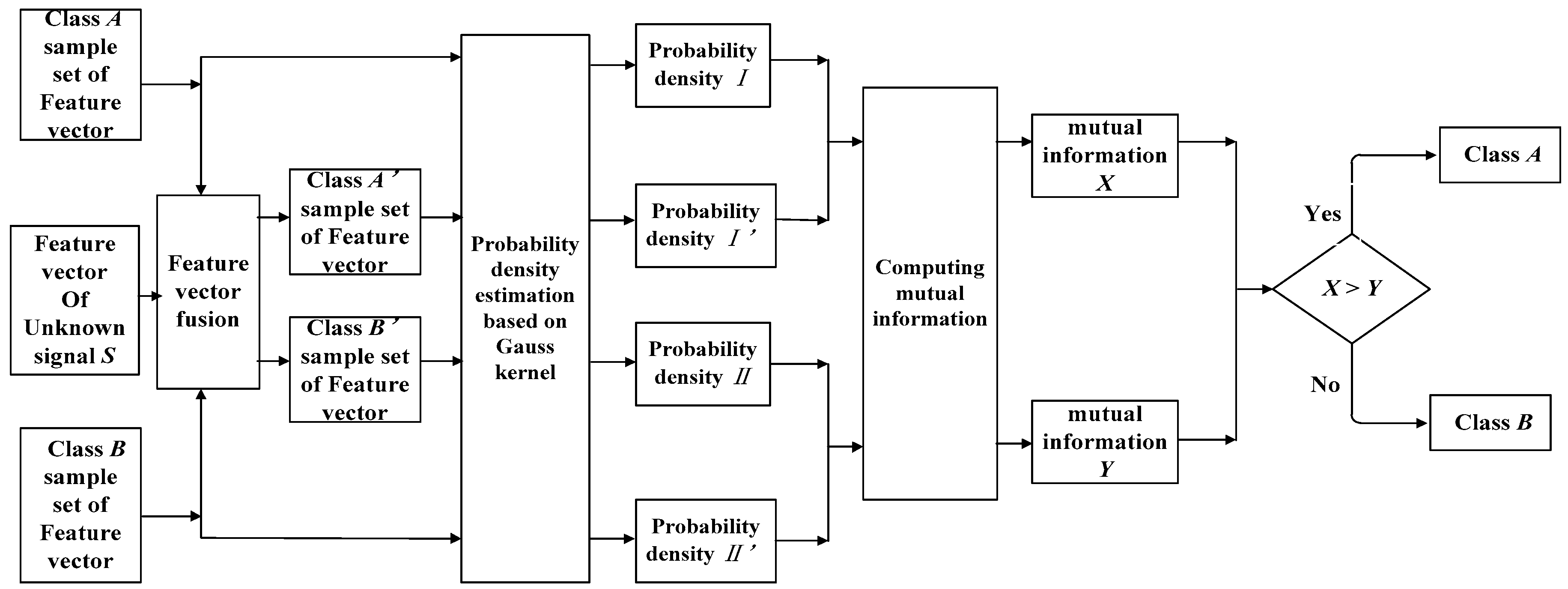
3.2. Basic Principle of Classifier
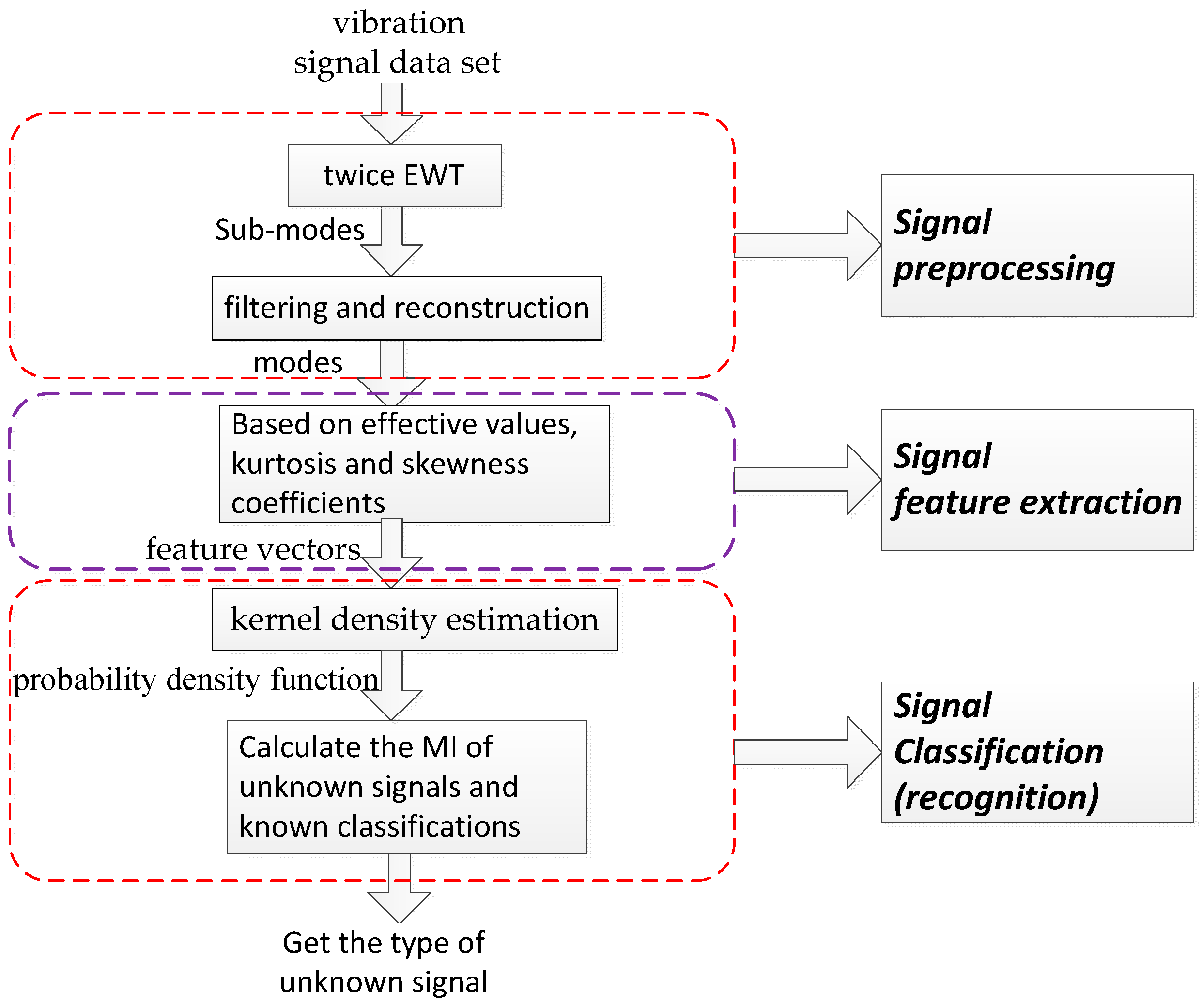
4. Fault Diagnosis of Rolling Bearing Based on AFEWT-KEDMI
- (1)
- The vibration signal is decomposed twice with EWT to obtain the sub-modes. Filtering is conducted using AFEWT, and the modes are constructed with the filtered sub-modes;
- (2)
- The effective values, kurtosis and skewness coefficients of each mode are extracted and then integrated into feature vectors;
- (3)
- Multiple groups of the same kind of signals are adopted. The feature vectors are extracted according to step (2), and the feature vector sample set is obtained based on extracted feature vectors.
- (4)
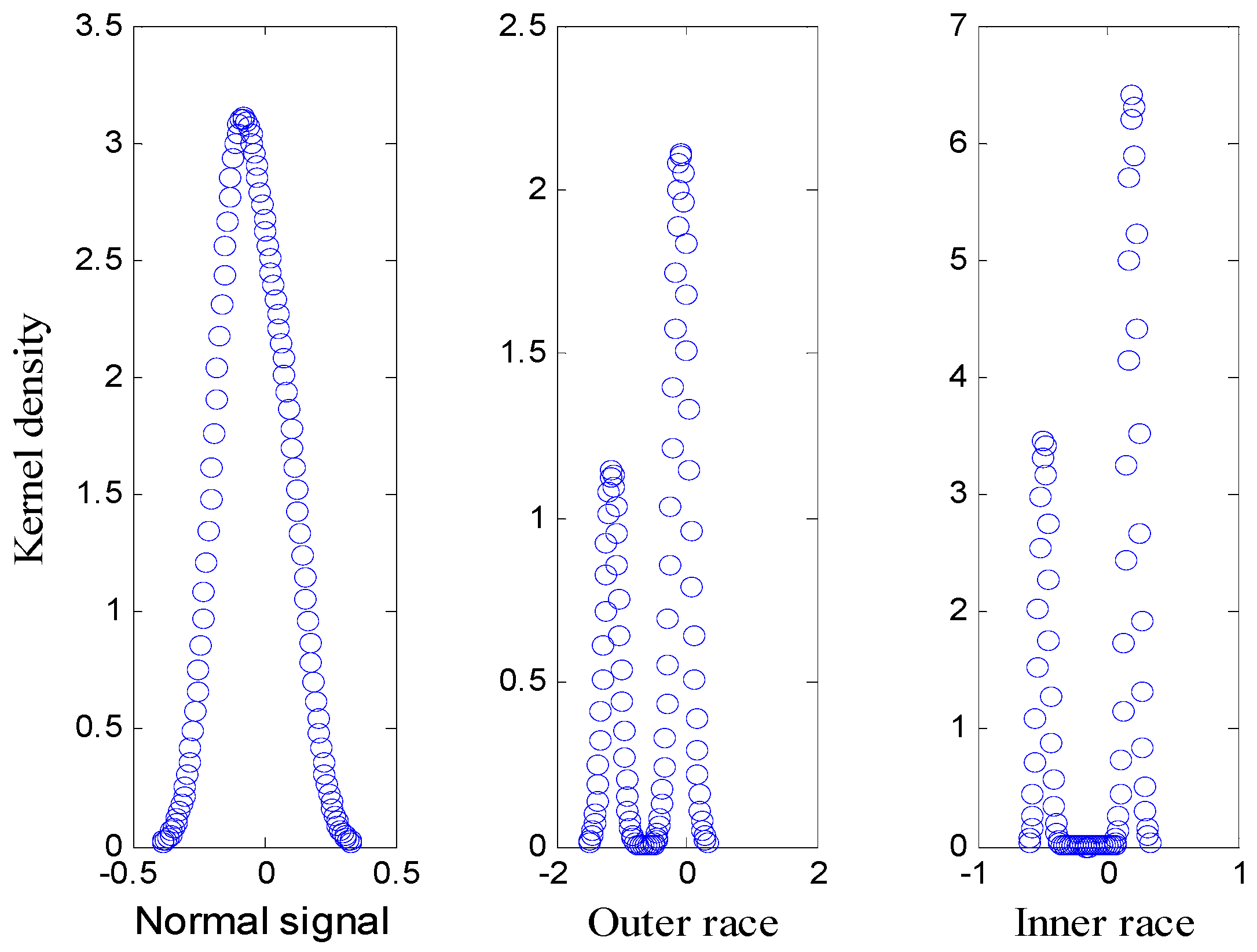
- The Gaussian kernel is used to estimate the probability density of the sample set;
- (5)
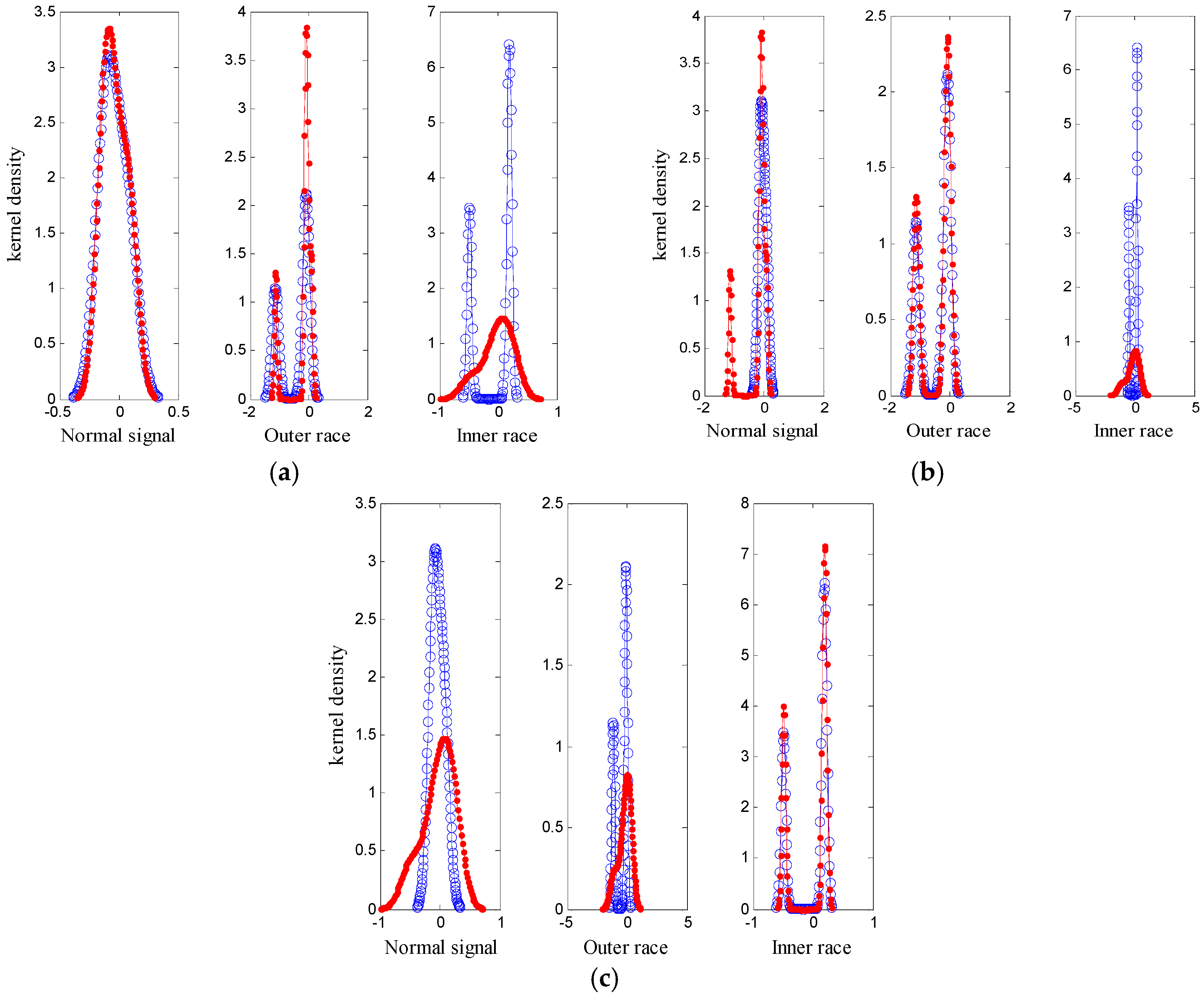
- The unknown feature vectors are integrated into the feature vector sample set. The probability density of the new feature vector sample set is recalculated;
- (6)
- After calculating the mutual information of probability density, the purpose of identifying the fault state of the rolling bearing can be achieved according to the category to which the mutual information belongs.
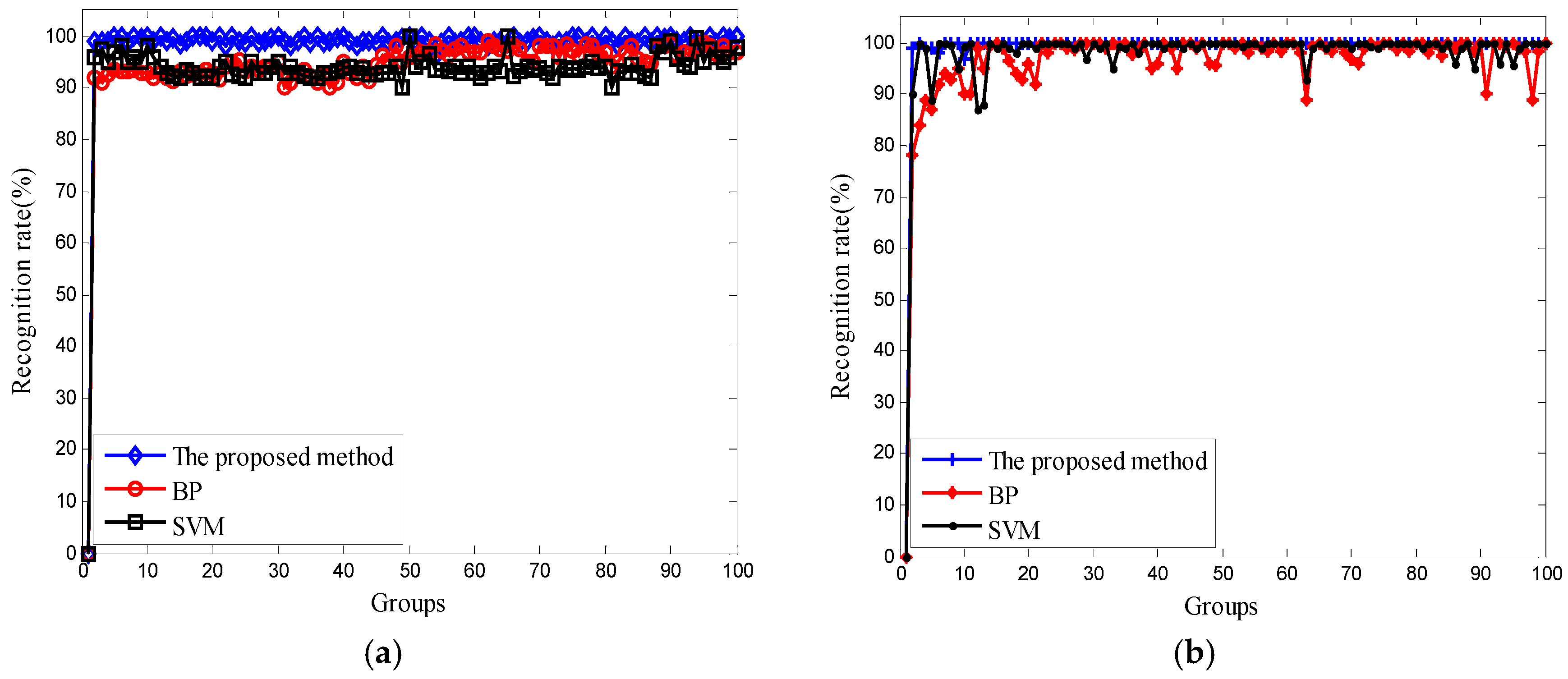
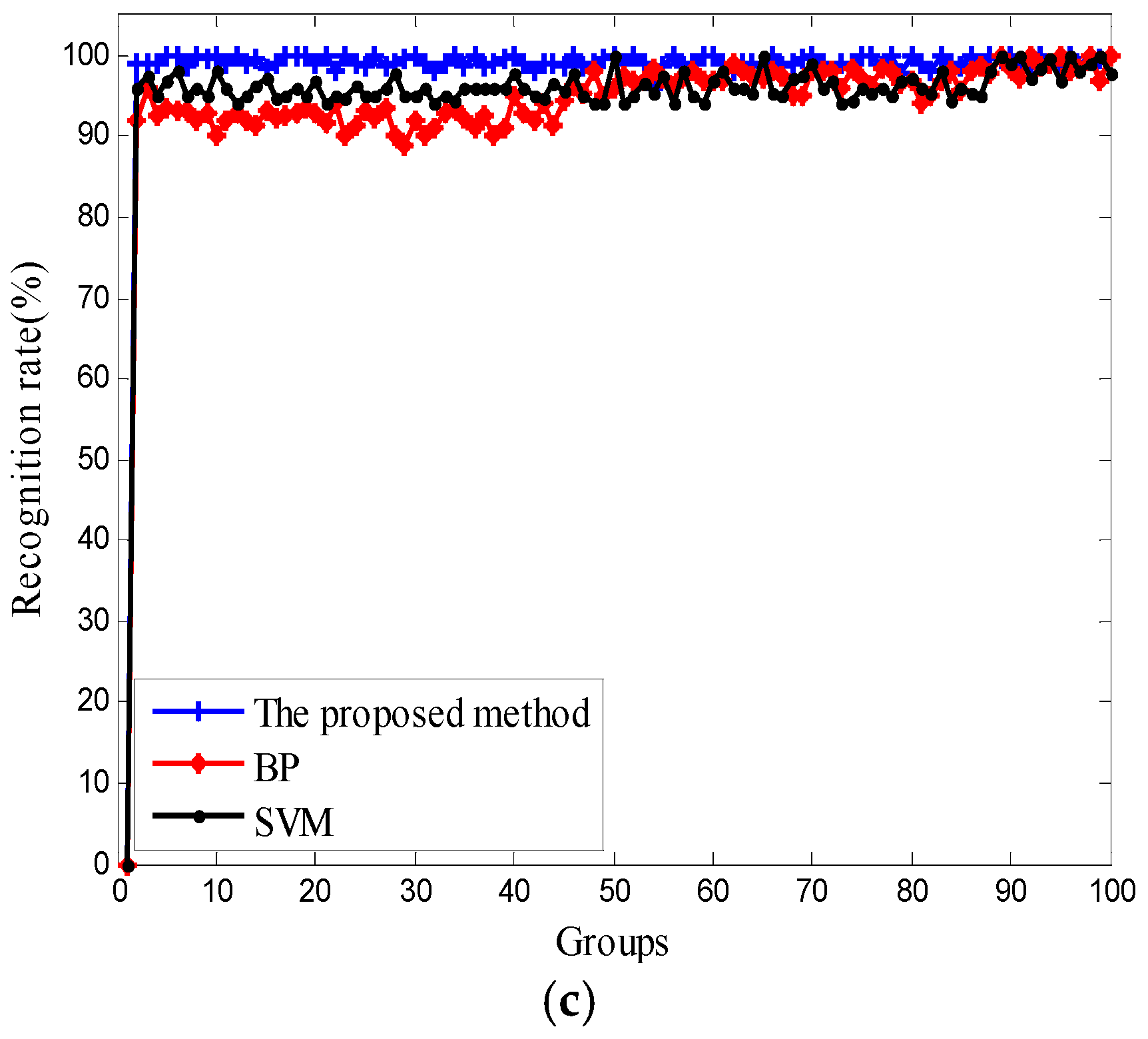
5. Experimental Results and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Camarena-Martinez, D.; Valtierra-Rodriguez, M.; Amezquita-Sanchez, J.P.; Romero-Troncoso, R.J.; Lozano-Garcia, J.M. Shannon Entropy and K -Means Method for Automatic Diagnosis of Broken Rotor Bars in Induction Motors Using Vibration Signals. Shock Vib. 2016, 2, 1–10. [Google Scholar] [CrossRef]
- Cao, C.F.; Song, J.W.; Wang, Q.H. Dynamic characteristics for the part fault of outer race in a ball hearing and computer simulation. J. East. China Jiaotong Univ. 2005, 4, 123–126. [Google Scholar]
- Li, Z.; Jiang, Y.; Hu, C.; Peng, Z. Recent progress on decoupling diagnosis of hybrid failures in gear transmission systems using vibration sensor signal: A review. Measurement 2016, 90, 4–19. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- He, Z.J.; Zi, Y.Y.; Meng, Q.F. Fault Diagnosis Principles of Non-Stationary Signal and Applications to Mechanical Equipment; Higher Education Press: Beijing, China, 2001; pp. 1–9. ISBN 7040102846. [Google Scholar]
- Xiao, Q.; Li, J.; Zeng, Z. A denoising scheme for DSPI phase based on improved variational mode decomposition. Mech. Syst. Signal Process. 2018, 110, 28–41. [Google Scholar] [CrossRef]
- Li, C.H.; Zhang, X.G.; Zhou, D.J. Fault diagnosis of rolling bearing based on bispectrum fuzzy clustering. J. Nantong Univ. 2014, 13, 32–36. [Google Scholar]
- Cai, J.H.; Hu, W.W.; Wang, X.H. Based on higher-order statistics, rolling bearing fault diagnosis method. J. Vib. Meas. Diagn. 2013, 33, 298–301. [Google Scholar]
- Azzalini, A.; Farge, M.; Kai, S. Nonlinear wavelet thresholding: A recursive method to determine the optimal denoising threshold. Appl. Comput. Harmon. A 2005, 18, 177–185. [Google Scholar] [CrossRef]
- Luisier, F.; Blu, T. SURE-LET multichannel image denoising: Interscale orthonormal wavelet thresholding. IEEE Trans. Image Process. 2008, 17, 482–492. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A. DC Motor Fault Analysis with the Use of Acoustic Signals, Coiflet Wavelet Transform, and K-Nearest Neighbor Classifier. Arch. Acoust. 2015, 40, 321–327. [Google Scholar] [CrossRef] [Green Version]
- Barri, A.; Dooms, A.; Schelkens, P. The near shift-invariance of the dual-tree complex wavelet transform revisited. J. Math. Anal. Appl. 2012, 389, 1303–1314. [Google Scholar] [CrossRef]
- Dong, W.; Ding, H. Full frequency de-noising method based on wavelet decomposition and noise-type detection. Neurocomputing 2016, 214, 902–909. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Bustos, A.; Rubio, H.; Castejón, C.; García-Prada, J.C. EMD-Based Methodology for the Identification of a High-Speed Train Running in a Gear Operating State. Sensors 2018, 18, 793. [Google Scholar] [CrossRef] [PubMed]
- Niu, D.; Liang, Y.; Hong, W.C. Wind Speed Forecasting Based on EMD and GRNN Optimized by FOA. Energies 2017, 10, 2001. [Google Scholar] [CrossRef]
- Li, Z.; Jiang, Y.; Hu, C.; Peng, Z. Difference equation based empirical mode decomposition with application to separation enhancement of multi-fault vibration signals. J. Differ. Equ. Appl. 2016, 23, 457–467. [Google Scholar] [CrossRef]
- Rehman, N.U.; Ehsan, S.; Abdullah, S.M.U.; Mandic, D.P.; McDonald-Maier, K.D. Multi-Scale Pixel-Based Image Fusion Using Multivariate Empirical Mode Decomposition. Sensors 2015, 15, 10923–10947. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, Y.; Di, H.; Malekian, R.; Qi, X.; Li, Z. Noncontact Measurement and Detection of Instantaneous Seismic Attributes Based on Complementary Ensemble Empirical Mode Decomposition. Energies 2017, 10, 1655. [Google Scholar] [CrossRef]
- Gilles, J. Empirical wavelet transforms. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Gao, Z.; Lin, J.; Wang, X.; Xu, X. Bearing Fault Detection Based on Empirical Wavelet Transform and Correlated Kurtosis by Acoustic Emission. Materials 2017, 10, 571. [Google Scholar] [CrossRef] [PubMed]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Ge, M.; Wang, J.; Ren, X. Fault Diagnosis of Rolling Bearings Based on EWT and KDEC. Entropy 2017, 19, 633. [Google Scholar] [CrossRef]
- Wang, Q.; Garrity, G.M.; Tiedje, J.M.; Cole, J.R. Naive Bayesian classifier for rapid assignment of rRNA sequences into the new bacterial taxonomy. Appl. Environ. Microbiol. 2007, 73, 5261–5267. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A. Recognition of Acoustic Signals of Loaded Synchronous Motor Using FFT, MSAF-5 and LSVM. Arch. Acoust. 2015, 40, 197–203. [Google Scholar] [CrossRef] [Green Version]
- Elasha, F.; Greaves, M.; Mba, D.; Fang, D. A comparative study of the effectiveness of vibration and acoustic emission in diagnosing a defective bearing in a planetry gearbox. Appl. Acoust. 2017, 115, 181–195. [Google Scholar] [CrossRef] [Green Version]
- Cherkassky, V.; Ma, Y. Practical selection of SVM parameters and noise estimation for SVM regression. Neural Netw. 2004, 17, 113–126. [Google Scholar] [CrossRef] [Green Version]
- Sheikhpour, R.; Sarram, M.A.; Sheikhpour, R. Particle swarm optimization for bandwidth determination and feature selection of kernel density estimation based classifiers in diagnosis of breast cancer. Appl. Soft Comput. 2016, 40, 113–131. [Google Scholar] [CrossRef]
- Vuollo, V.; Holmström, L.; Aarnivala, H.; Harila, V.; Heikkinen, T.; Pirttiniemi, P.; Valkama, A.M. Analyzing infant head flatness and asymmetry using kernel density estimation of directional surface data from a craniofacial 3D model. Stat. Med. 2016, 35, 4891–4904. [Google Scholar] [CrossRef] [PubMed]
- Kutyniok, G. Ambiguity functions, Wigner distributions and Cohen’s class for LCA groups. J. Math. Anal. Appl. 2003, 277, 589–608. [Google Scholar] [CrossRef]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Sub-Mode | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| F1 | 1 | 1 | 1 | 0 | ||||
| F2 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | |
| F3 | 0 | 0 | 1 | 0 | ||||
| F4 | 1 | 0 | 0 | 1 | 0 | 1 | ||
| F5 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | |
| F6 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 0 |
| F7 | 0 | 0 | 1 | 0 | ||||
| F8 | 1 | 0 | 1 | 0 | 1 | |||
| F9 | 0 | 1 | 0 | 0 | ||||
| F10 | 0 | 0 | 0 | 1 | 0 | |||
| F11 | 0 | 0 | 0 | 0 | ||||
| F12 | 0 | 1 | 0 | 0 | 1 | 0 | ||
| Original SNR | SNR after Filtering | |||
|---|---|---|---|---|
| Median Filter | Moving Average Filter | Wavelet Filter | AFEWT | |
| 13.5392 | 9.3115 | 13.5392 | 5.9103 | 14.0713 |
| 1.4980 | 2.6651 | 3.5997 | 3.3790 | 7.7808 |
| −6.4608 | −3.4384 | −3.2688 | −2.5217 | −2.4956 |
| Position on Rig | Model Number | Fault Frequencies (Multiple of Shaft Speed, KHz) | ||
|---|---|---|---|---|
| Outer Race | Inner Race | Rolling Element Ball | ||
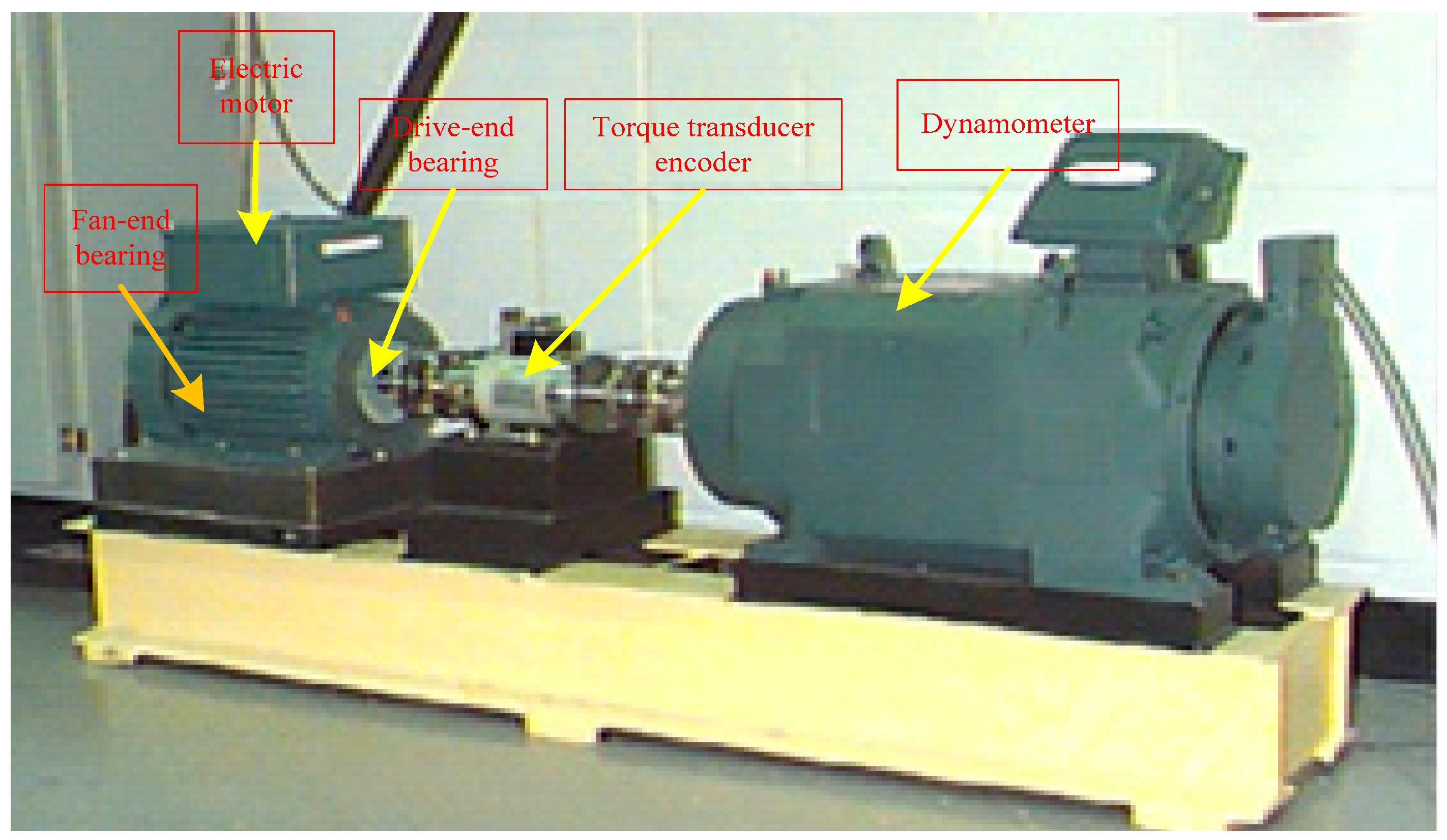
| Drive end | SKF6205-2RSJEM | 23.585 | 15.415 | 22.357 |
| Fan end | SKF6203-2RSJEM | 21.053 | 14.947 | 21.994 |
| Condition | Mutual Information | ||
|---|---|---|---|
| Normal Signal | Inner Race | Outer Race | |
| Normal signal | 0.9117 | 0.1267 | 0.1471 |
| Inner ring fault | 0.26017 | 0.9042 | 0.1815 |
| Outer ring fault | 0.1892 | 0.2741 | 0.8330 |
| Different Diagnosis Methods | Training Data | Testing Data | Accuracy (100%) | ||
|---|---|---|---|---|---|
| Normal Signal | Outer Race | Inner Race | |||
| AFEWT-KDEMI | 100 | 30 | 96.7 | 100 | 96.7 |
| EWT-KDEMI | 100 | 30 | 93.2 | 96.7 | 93.2 |
| EMD-KDEMI | 100 | 30 | 86.7 | 90.1 | 86.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, M.; Wang, J.; Zhang, F.; Bai, K.; Ren, X. A Novel Fault Diagnosis Method of Rolling Bearings Based on AFEWT-KDEMI. Entropy 2018, 20, 455. https://doi.org/10.3390/e20060455
Ge M, Wang J, Zhang F, Bai K, Ren X. A Novel Fault Diagnosis Method of Rolling Bearings Based on AFEWT-KDEMI. Entropy. 2018; 20(6):455. https://doi.org/10.3390/e20060455
Chicago/Turabian StyleGe, Mingtao, Jie Wang, Fangfang Zhang, Ke Bai, and Xiangyang Ren. 2018. "A Novel Fault Diagnosis Method of Rolling Bearings Based on AFEWT-KDEMI" Entropy 20, no. 6: 455. https://doi.org/10.3390/e20060455