Stability Analysis for Memristor-Based Complex-Valued Neural Networks with Time Delays

1
School of Management, Nanjing University of Posts and Telecommunications, Nanjing 210023, China
2
School of Management Science and Engineering, Central University of Finance and Economics, Beijing 100080, China
3
School of Sciences, Southwest Petroleum University, Chengdu 610500, China
4
School of Computer Science, Northwestern Polytechnical University, Xi’an 710072, China
*
Author to whom correspondence should be addressed.
Entropy 2019, 21(2), 120; https://doi.org/10.3390/e21020120
Submission received: 6 December 2018
/
Revised: 19 January 2019
/
Accepted: 21 January 2019
/
Published: 28 January 2019
(This article belongs to the Special Issue Statistical Mechanics of Neural Networks)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this paper, the problem of stability analysis for memristor-based complex-valued neural networks (MCVNNs) with time-varying delays is investigated extensively. This paper focuses on the exponential stability of the MCVNNs with time-varying delays. By means of the Brouwer’s fixed-point theorem and M-matrix, the existence, uniqueness, and exponential stability of the equilibrium point for MCVNNs are studied, and several sufficient conditions are obtained. In particular, these results can be applied to general MCVNNs whether the activation functions could be explicitly described by dividing into two parts of the real parts and imaginary parts or not. Two numerical simulation examples are provided to illustrate the effectiveness of the theoretical results.
1. Introduction
In the past few decades, complex-valued neural networks (CVNNs) which extend the real-valued neural network (RVNNs) have aroused widespread concern because of their extensive application in various fields, such as engineering optimization, electromagnetic wave imaging, pattern recognition, and so forth [1,2]. Some conclusions about CVNNs have been obtained in [3,4]. Since the physical implementation of the nanoscale memristor in 2008 [5], memristor-based neural networks (MNNs) have attracted a remarkable amount of attention [6,7,8,9,10,11], owing to their memory characteristics and nanometer dimensions. Therefore, it is important to research the properties of MNNs which play a significant role in the system design. There exist many research results concerning the existence, uniqueness, and stability for the equilibrium of MNNs [12,13,14,15].
Figure Compared with real-valued neural networks, the complex-valued neural network (CVNN) is a frame that processes information in the complex plane—namely, their input and output signals, state variables, connection weights, and activation functions are all complex-valued [16]. In recent years, the MCVNNs which replace the real-valued MNNs (RVMNNs) in the VLSI circuits have attracted numerous researchers to study the properties of MCVNNs [17,18]. Nevertheless, it is complicated to investigate the stability of MCVNNs, since the states and the connected weights are complex-valued. In [17,18], the n-dimensional MCVNNs were converted into -dimensional RVMNNs, and some sufficient conditions have been derived aiming to guarantee the existence, uniqueness, and exponential stability of the equilibrium. Nevertheless, not every activation functions could be explicitly described by dividing into two parts, i.e., the real part and the imaginary one. There are a few results to be applied to general MCVNNs where activation functions cannot explicitly separate the real parts and imaginary parts.
Figure Undoubtedly, due to the limited switching speed of the amplifier and the transmission delay during communication between neurons, time delays are inevitably encountered in the neural network, and the presence of time delays may cause instability or oscillation to the neural network. Therefore, it is meaningful to discuss the dynamics of neural networks with time delays [11,19,20].
Motivated by the above analysis, the exponential stability problem of MCVNNs with time-varying delays is investigated in this paper. Novel MCVNNs with time-varying delays is first presented. with the adoption of Brouwer’s fixed-point theorem, some sufficient conditions of the existence and uniqueness of the equilibrium point are achieved. Then, based on the properties of the M-matrix, a sufficient condition is obtained to guarantee the exponential stability for the MCVNNs with time delays. Among these sufficient conditions, the condition of the activation functions is relaxed, not to be divided into real parts and imaginary parts, but only to meet the Lipschitz condition. Therefore, the obtained method in this paper is more general than that in [17,18].
The rest of the paper is outlined as follows: in Section 2, the preliminaries, including some lemmas and necessary definitions, are stated, and the model of the MCVNNs is described; in Section 3, some sufficient conditions are achieved about the existence and the uniqueness of the equilibrium point, and several criteria are obtained to guarantee the exponential stability for the MCVNNs with time delays, while two examples are presented in Section 4.
Notation: The solutions of all the systems are considered in the sense of Filippov [21]. Let and be the sets of complex numbers and real numbers, respectively. , and denote the n-dimensional complex, and the real and positive real vector space. indicates a complex number, and denotes the conjugate number of z, where , , . If , then .
2. Preliminaries
In this section, we will construct a class of memristor-based complex-valued neural networks, which is described as follows:
where , , denotes the neuron self-inhibitions, () are the transmission delays that satisfy , where indicates the upper bound of the delays.
Then, (1) could be rewritten equivalently in the matrix form being illustrated as follows:
where represents the state vector; ; and indicate the complex-valued activation functions respectively; and ; and ; denotes an external input vector.
Remark 1.
When both the activation functions, and , are real functions which can be defined by , MCVNN (1) becomes the one studied in [22]; if , MCVNN (1) is degenerated, the model is investigated in [18]; when the connection weight matrices and are independent of the feedback states, MCVNN (1) is reduced to CVNNs with delays investigated in [23,24]. Therefore, the model in this paper is more general than than those proposed in previous literature, and all the results in the following are applicable to those special cases.
According to the properties of the memristor, the complex-valued connection weights and could be described as follows:
where and represent the memductances of memristors and , respectively, stands for the memristor between the activation function and , denotes the memristor between and , represents the capacitor, and represents the sign function, which is provided as
where the complex-valued constants are the switching jumps.
Next, we will introduce some useful definitions and assumptions.
Definition 1.
Let , be a set-valued map from , if there exists a nonempty set for any point . A nonempty set-valued map F is upper-semi-continuous at , if, for any open set N containing , there exists a neighborhood M of such that . is called a closed (convex, compact) image if for all .
Definition 2.
For , , where is discontinuous in x and the set-valued map of is defined as:
where is the ball with a center x and radius δ; and the intersection is applied to all sets N of measure zero and all ; while denotes the Lebesgue measure of set N. A Filippov solution of the Cauchy problem with initial condition is absolutely continuous on any subinterval of , which satisfies and the differential inclusion:
In this paper, and are dependent on the states, and they are discontinuous. Therefore, the solutions of all systems are intended in Filippov’s sense.
Under Definition 1, (1) could be rewritten as follows:
or equivalently, for all , there exit measurable functions and such that
Then, (9) could be transformed into the matrix format, which is provided as follows
where and .
Before giving our main results, an assumption should be given.
Assumption 1.
For , the Lipschitz continuity condition of the activation functions and should be satisfied in the complex field—that is, there exist constants and , such that, for any , we have
where and denote Lipschitz constants, respectively.
Remark 2.
In [18,25,26], it is necessary to ensure that the activation functions can be explicitly expressed by separating into real and imaginary parts, which is provided as
where and denote the real and imaginary parts of , respectively. In addition, it is always required that are existent, continuous, and bounded, aiming to guarantee the stability of the system considered in [27]. In fact, these necessary conditions are conservative, since not every activation function could be explicitly separated into real parts and imaginary parts. In this paper, and are only necessary in order to satisfy Assumption 1. Moreover, if the conditions in [18,25,26], the activation functions and could satisfy the Assumption 1. Hence, the obtained results seem to be more general and less conservative than those which appeared in [17,18,25,26,27].
Definition 3.
Lemma 1.
[24]: Let with for and . Suppose be an M-matrix. For any time , let satisfies the following delay differential inequality for any initial condition :
where , , for . Then, , as long as , where is a positive real vector, and is decided by the inequality: .
Definition 4.
[24] The equilibrium point of (8) is said to be exponentially stable when there are constants and , such that for all the inequality is satisfied.
3. Main Results
In the following, we will firstly propose several sufficient conditions to ensure that (1) has a unique equilibrium point, and then corresponding proof is provided, aiming to ensure that the unique equilibrium point is global exponentially stable.
Theorem 1.
Suppose Assumption 1 is satisfied and is an M-matrix, there is a unique equilibrium point for (1), where with and with , and .
Proof.
Firstly, we will try to illustrate that (10) has an equilibrium point —that is, we should prove is a solution of the following equation
Consider the following operator according to the differential Equation (9)
Then, (16) could be transformed into the following matrix format:
where , , and .
with the adoption of Assumption 1, one has
where . Then, one can get
where , and . Since is an M-matrix, there is a positive vector such that
yielding
or
Consider . Therefore, for any , one has . That is, the continuous operator maps convex and compact set into . According to Brouwer’s fixed-point theorem, H has a fixed point , and is also the equilibrium point of (10).
Next, we will prove the equilibrium point of (10) is unique. By means of apagoge, if it is not true, there exists another equilibrium point with . Then,
As a result, one has . When , we have . Then, one has . On the other hand, is an M-matrix, which implies that . This contradiction indicates that —that is, there exists a unique equilibrium point for (10). □
Theorem 2.
Suppose Assumption 1 holds. If the condition in Theorem 1 is satisfied, the unique equilibrium point is global exponentially stable.
Proof.
Under Assumption 1, there exists a unique equilibrium point for (10) if the condition in Theorem 1 is satisfied. Suppose is the unique equilibrium point of (10). Then, using the translation , we can transfer the equilibrium point to the origin. Hence, we obtain
where , and .
By using (19), we can have
where and .
Because is a real diagonal matrix , one has
where is the conjugator of .
According to Assumption 1, we could get
Similar with (23), we have
Since is an M-matrix, there exists a vector such that .
For any given initial condition , , by Lemma 1, we could obtain
where , is decided by the inequality . This leads to the result
The proof completes. □
Figure In this section, some sufficient conditions are achieved about the existence and uniqueness of the equilibrium point, and several criteria are obtained to guarantee the exponential stability for the MCVNNs with time delays. These results obtained can be applied to more general MCVNNs whether the activation functions are explicitly described by either dividing the real parts and imaginary parts, or not.
4. Examples
In this section, two examples are given to demonstrate the validity of the obtained results.
Example 1.
Consider a two-order MCVNN, as follows:
where , , and the time delays ,
Therefore, one can get
Assume the activation functions of (29) as follows:
Then, through simple calculation, one can get the activation functions which satisfy Assumption 1. That is, for any , one can have
Then, one has .
We have that
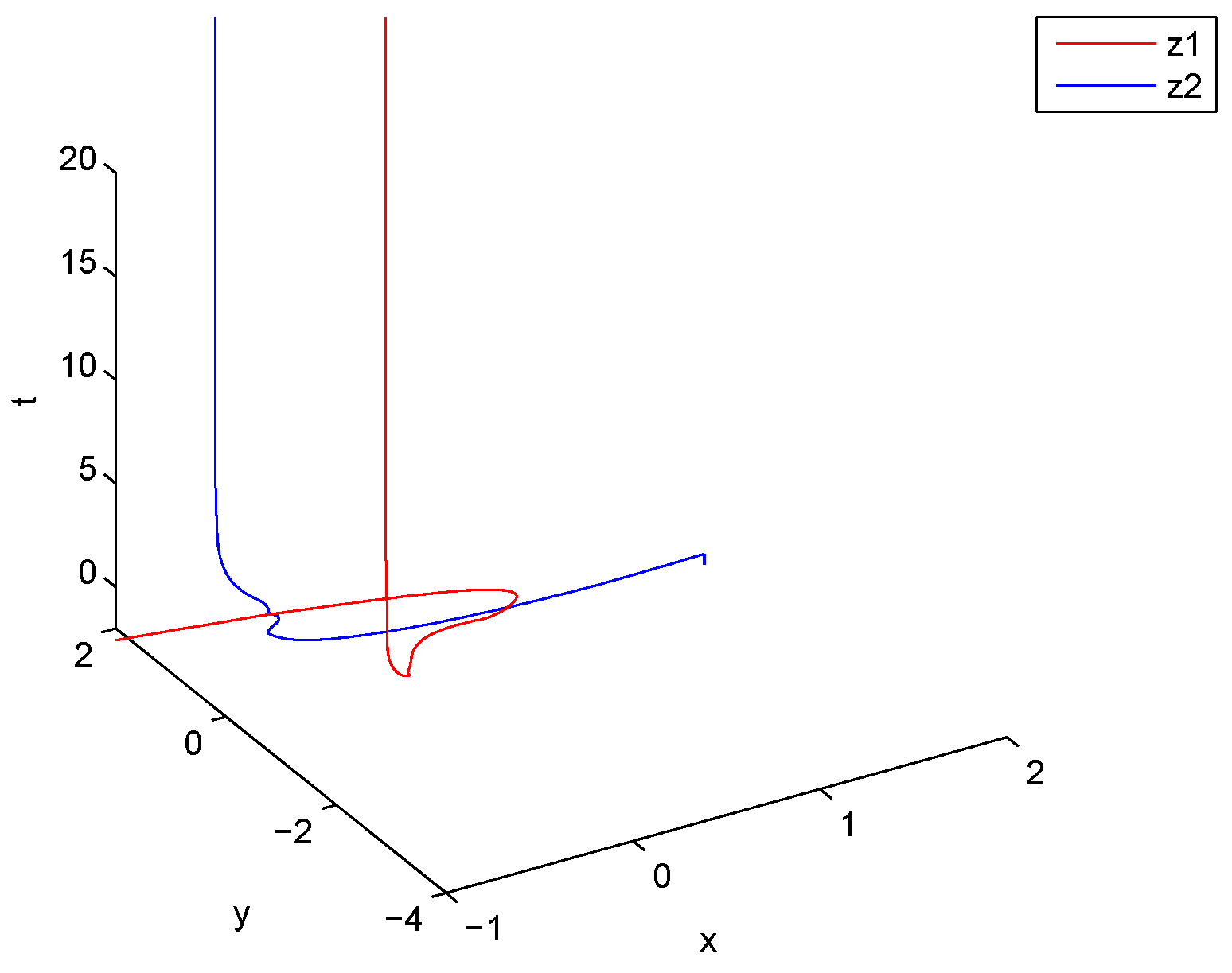
is an M matrix, then the conditions of Theorem 1 are satisfied. Let the initial values of (29) be for . Figure 1 and Figure 2 show that the equilibrium point of (29) is existent, unique, and exponentially stable.
Example 2.
Consider the MCVNNs with , and the time-varying delays ,
Therefore, one can get
Assume the activation functions of (29) are as follows:
Similarly, one has .
Remark 3.
Examples 1 and 2 show that the constraints on the activation functions are more relaxed. In Example 1, and only need to satisfy the Lipschitz condition, and the partial derivative of and need not be existent, bounded, and continuous, unlike in [3,27]—that is, need not be existent, bounded, and continuous. In Example 2, and need not be explicitly described by dividing their real and imaginary parts, unlike in [3,17,18,25,26,27,28,29,30].
5. Conclusions
In this paper, the existence, uniqueness, and exponential stability of the equilibrium point for a class of MCVNNs with time delays were investigated. Several sufficient conditions were obtained by means of the M-matrix theorem and Brouwer’s fixed-point theorem. These results obtained can be applied to general MCVNNs where the activation functions are explicitly described by either dividing the real parts and imaginary parts or not. Two numerical examples were provided, while our corresponding analysis demonstrates that the theoretic results obtained are viable for the design and application of MCVNNs with time delays.
Author Contributions
Conceptualization, P.H.; Methodology, J.G.; Software, J.H.; Validation, P.Z.; Formal Analysis, J.G.
Funding
This work is supported by the National Key R&D Program of China under Grant 2017YFD0401005, and the Natural Science Foundation of the Jiangsu Higher Education Institutions of China under Grant 18KJB520038.
Acknowledgments
We gratefully acknowledge the kind cooperation of Peican Zhu in the preparation of this Application note.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hirose, A. Complex-Valued Neural Networks; Springer Science and Business Media: Berlin, Germany, 2006. [Google Scholar]
- Valle, M.E. Complex-Valued Recurrent Correlation Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1600–1612. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wang, J. Global Stability of Complex-Valued Recurrent Neural Networks with Time-Delays. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 853–865. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Song, Q. Boundedness and Complete Stability of Complex-Valued Neural Networks with Time Delay. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1227–1238. [Google Scholar] [CrossRef] [PubMed]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wang, J. Global uniform asymptotic stability of memristor-based recurrent neural networks with time delays. In Proceedings of the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Li, H.-J.; Wang, L. Multi-scale asynchronous belief percolation model on multiplex networks. New J. Phys. 2019, 21, 015005. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, S.; Huang, Z.; Zhang, H. Exponential Stability and Stabilization of Delayed Memristive Neural Networks Based on Quadratic Convex Combination Method. IEEE Trans. Neural Netw. Learn. Syst. 2015, 129, 2029–2035. [Google Scholar] [CrossRef] [PubMed]
- Bu, Z.; Li, H.J.; Cao, J.; Wang, Z.; Gao, G. Dynamic Cluster Formation Game for Attributed Graph Clustering. IEEE Trans. Cybern. 2017, 49, 328–341. [Google Scholar] [CrossRef]
- Li, H.-J.; Bu, Z.; Li, Y.; Zhang, Z.; Chu, Y.; Li, G.; Cao, J. Evolving the attribute flow for dynamical clustering in signed networks. Chaos Sol. Fractals 2018, 110, 20–27. [Google Scholar] [CrossRef]
- Gao, J.; Zhu, P.; Alsaedi, A.; Alsaadi, F.E.; Hayat, T. A new switching control for finite-time synchronization of memristor-based recurrent neural networks. Neural Netw. 2017, 86, 1–9. [Google Scholar] [CrossRef]
- Li, H.; Jiang, H.; Hu, C. Existence and global exponential stability of periodic solution of memristor-based BAM neural networks with time-varying delays. Neural Netw. 2016, 75, 97–109. [Google Scholar] [CrossRef]
- Li, H.J.; Bu, Z.; Wang, Z.; Cao, J.; Shi, Y. Enhance the Performance of Network Computation by a Tunable Weighting Strategy. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 2, 214–223. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Huang, T.; Huang, J. Stability and synchronization of memristor-based coupling neural networks with time-varying delays via intermittent control. Neurocomputing 2016, 173, 1066–1072. [Google Scholar] [CrossRef]
- Xu, C.; Li, P.; Pang, Y. Exponential stability of almost periodic solutions for memristor-based neural networks with distributed leakage delays. Neural Comput. 2016, 28, 2726–2756. [Google Scholar] [CrossRef]
- Gao, J.; Cao, J. Aperiodically intermittent synchronization for switching complex networks dependent on topology structure. Adv. Differ. Equ. 2017, 2017, 244. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J. Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with time delays. Nonlinear Dyn. 2014, 78, 2823–2836. [Google Scholar] [CrossRef]
- Wang, H.; Duan, S.; Huang, T.; Wang, L.; Li, C. Exponential stability of complex-valued memristive recurrent neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 99, 1–6. [Google Scholar] [CrossRef]
- Gao, J.; Zhu, P.; Xiong, W.; Gao, J.; Zhang, L. Asymptotic synchronization for stochastic memristor-based neural networks with noise disturbance. J. Frankl. Inst. 2016, 353, 3271–3289. [Google Scholar] [CrossRef]
- Gao, J.; Zhu, P. Global exponential synchronization of networked dynamical systems under event-triggered control schemes. Adv. Differ. Equ. 2016, 2016, 286. [Google Scholar] [CrossRef]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988; pp. 377–390. [Google Scholar]
- Guo, Z.; Wang, J.; Yan, Z. Attractivity analysis of memristor-based cellular neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 704–717. [Google Scholar] [CrossRef]
- Liu, X.; Chen, T. Global exponential stability for complex-valued recurrent neural networks with asynchronous time delays. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 593–606. [Google Scholar] [CrossRef]
- Pan, J.; Liu, X.; Xie, W. Exponential stability of a class of complex-valued neural networks with time-varying delays. Neurocomputing 2015, 164, 293–299. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, S.; Chang, W. Input-to-state stability of memristor-based complex-valued neural networks with time delays. Neurocomputing 2017, 221, 159–167. [Google Scholar] [CrossRef]
- Chen, X.; Song, Q. Global stability of complex-valued neural networks with both leakage time delay and discrete time delay on time scales. Neurocomputing 2013, 121, 254–264. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, J.; Shi, J. Exponential stability of complex-valued neural networks with mixed delays. Neurocomputing 2014, 128, 483–490. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Anbuvithya, R.; Sakthivel, R.; Park, J.H.; Prakash, P. Non-fragile H-infinity synchronization of memristor-based neural networks using passivity theory. Neural Netw. 2016, 74, 85–100. [Google Scholar] [CrossRef]
- Zhang, R.; Park, J.H.; Zeng, D.; Liu, Y.; Zhong, S. A new method for exponential synchronization of memristive recurrent neural networks. Inf. Sci. 2018, 466, 152–169. [Google Scholar] [CrossRef]
- Zhang, R.; Zeng, D.; Ju, H.P.; Zhong, S.; Yu, Y. Novel discontinuous control for exponential synchronization of memristive recurrent neural networks with heterogeneous time-varying delays. J. Frankl. Inst. 2018, 355, 2826–2848. [Google Scholar] [CrossRef]
Figure 1.
Curves of and .

Figure 2.
Curves of the real and imaginary parts of and .

Figure 3.
Curves of and .

Figure 4.
Curves of the real and imaginary parts of and .

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hou, P.; Hu, J.; Gao, J.; Zhu, P. Stability Analysis for Memristor-Based Complex-Valued Neural Networks with Time Delays. Entropy 2019, 21, 120. https://doi.org/10.3390/e21020120
AMA Style
Hou P, Hu J, Gao J, Zhu P. Stability Analysis for Memristor-Based Complex-Valued Neural Networks with Time Delays. Entropy. 2019; 21(2):120. https://doi.org/10.3390/e21020120
Chicago/Turabian StyleHou, Ping, Jun Hu, Jie Gao, and Peican Zhu. 2019. "Stability Analysis for Memristor-Based Complex-Valued Neural Networks with Time Delays" Entropy 21, no. 2: 120. https://doi.org/10.3390/e21020120
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.