Investigation on Reliability and Scalability of an FBG-Based Hierarchical AOFSN

Abstract
:
1. Introduction
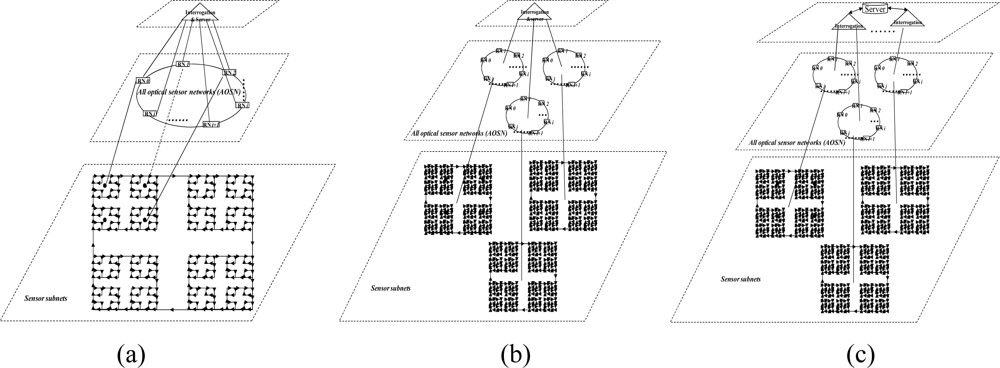
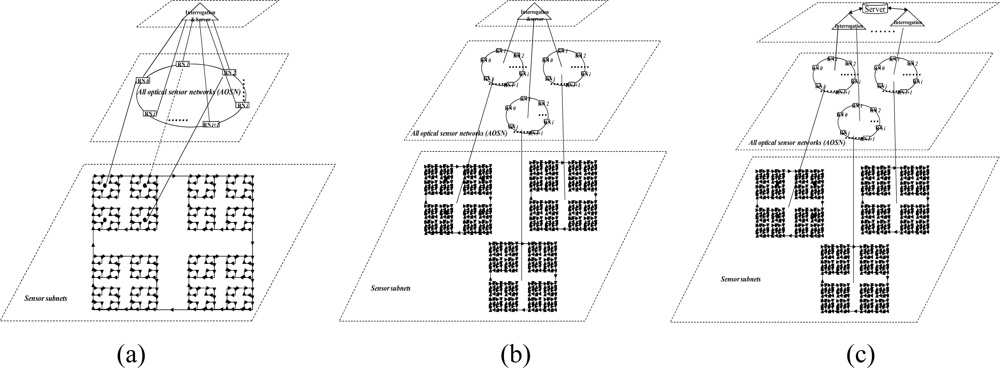
2. Hierarchical AOFSN Architectures
3. Sensor Subnet Construction
3.1. Two Unicursal and Regular SC-Based AFOSN
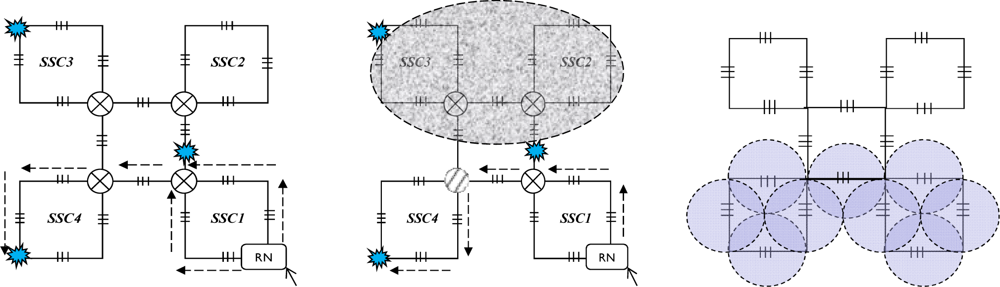
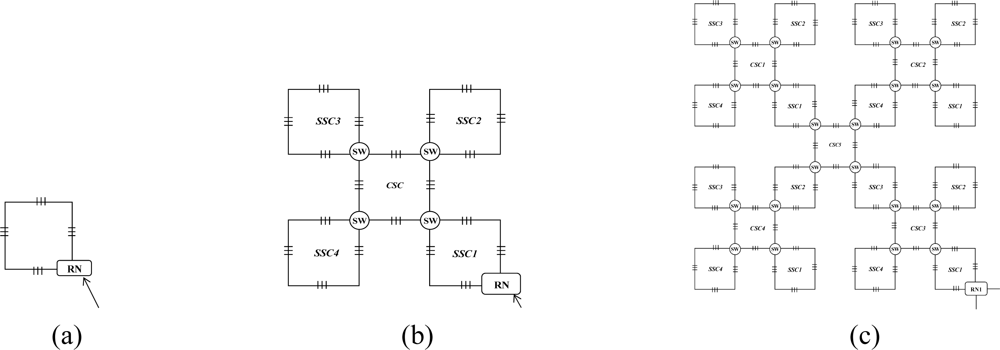
3.1.1. Square SC (SSC)-Based AFOSN
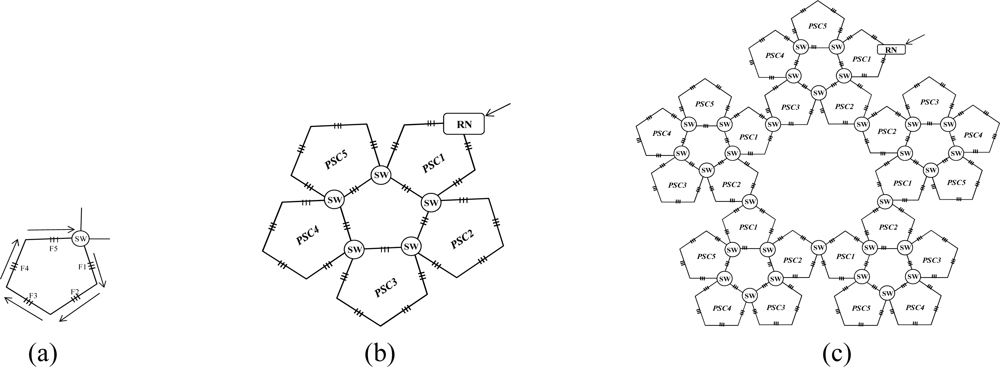
3.1.2. Pentagon SC (PSC)-Based AFOSN
4. Consideration of Reliability
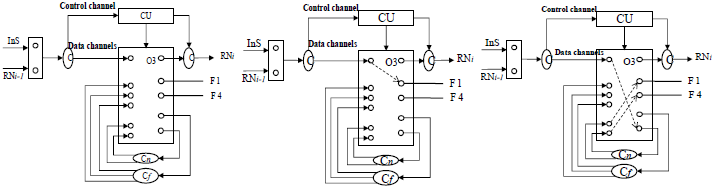
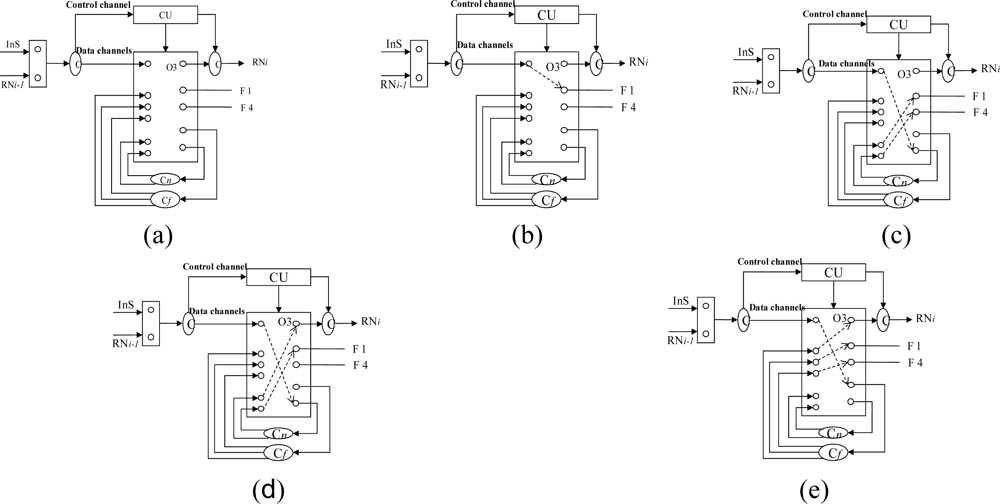
4.1. Switch Architecture for Higher-Level Reliability
4.2. Reliability in SSN Level
5. Consideration of Scalability
6. Numerical Results
6.1. Reliability Analysis
(1). One link failure
(2). Two link failures


- Rule 1: If one of the two link failures lies in SSC1 which is directly connected to the RN node, the combination is classified into case 1. There are three combinations as follows:
- Case 1: {SSC1 & SSC2, SSC1 & SSC3, SSC1 & SSC4}
- Rule 2: If the two link failures lie in the two SSCs which are parallel in position besides SSC5, the combination is classified into case 1. There are two combinations as follows:
- Case 1: {SSC2 & SSC3, SSC3 & SSC4}
- Rule 3: If the two link failures lie in the two SSCs which are diagonal in position, the combination is classified into case 2. There is one combination as follows:
- Case 2: {SSC2 & SSC4}
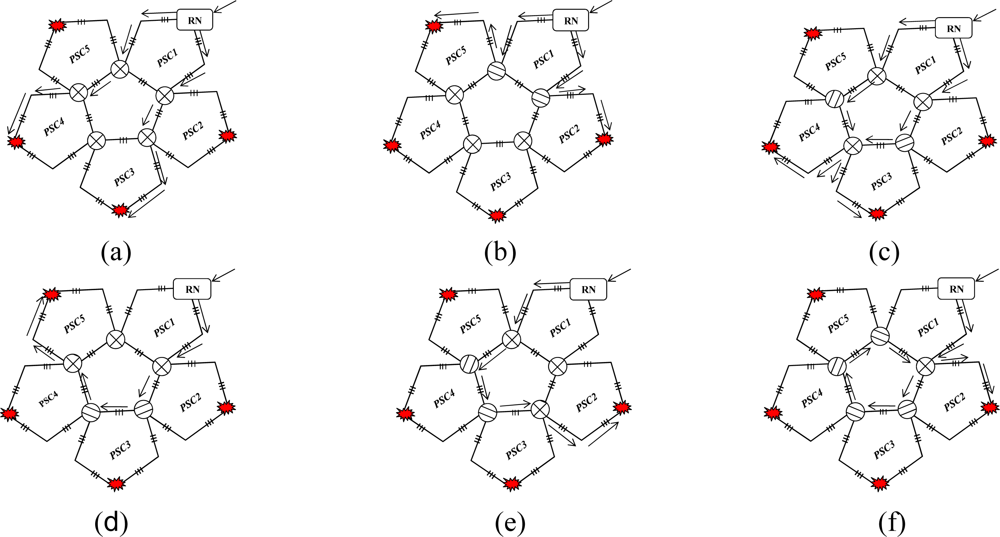
- Rule 4: In view of the fact that one link failure lies in SSC5, the combinations cannot be directly classified into case 1 or case 2. If the position of another link failure is separated by two 2 × 2 switches from the one in SSC5, the combination should be classified into case 2, except for the cases when the other link failure lies in SSC1. While if the two positions are only separated by one 2 × 2 switch, the combination should be classified into case 2. There are 10 sub-combinations that can be classified into case 1, and six sub-combinations that can be classified into case 2, as follows (referring to Figure 14):
- Case 1: {FBG1 & SSC1, FBG1 & SSC2, FBG2 & SSC3, FBG2 & SSC4, FBG3 & SSC3, FBG 3 & SSC4, FBG4 & SSC1, FBG 4 & SSC4, FBG2 & SSC1, FBG3 & SSC1}
- Case 2: {FBG1 & SSC3, FBG1&SSC4, FBG2 & SSC4, FBG3 & SSC2, FBG4 & SSC2, FBG4 & SSC3}
(1) Three link failures
(2) Reliability calculation
6.2. Scalability Analysis
- Number of total sensors and switches for SSC-based AOFSN: and .
- Number of total sensors and switches for PSC-based AOFSN: 5i+1 and .
7. Conclusions
Acknowledgments
References
- Peng, P.C.; Tseng, H.Y.; Chi, S. A Novel Fiber-Laser-Based Sensor Network with Self-Healing Function. IEEE Photonic. Technol. Lett 2003, 15, 275–277. [Google Scholar]
- Eduardo, L.I.; Paul, U.; Manuel, L.A. Protection Architectures for WDM Optical Fiber Bus Sensor Arrays. J. Eng. Comput. Arch 2007, 1, 1–18. [Google Scholar]
- Gillooly, A.M.; Zhang, L.; Bennion, I. High Survivability Fiber Sensor Network for Smart Structures. Proc. SPIE 2004, 5579, 99–106. [Google Scholar]
- Peng, P.C.; Tseng, H.Y.; Chi, S. Star-Bus-Ring Architecture for Fiber Bragg Grating Sensors. Jap. J. Appl. Phys 2004, 43, 7072–7076. [Google Scholar]
- Wei, P.; Sun, X.H. Smart Sensor Network is Enhanced by New Models. Proc. SPIE 2007. 10.1117/2.1200707.0523.. [Google Scholar]
- Peng, L.M.; Yang, W.H.; Li, X.W.; Kim, Y.C. The Construction of a FBG-Based Hierarchical AOFSN with High Reliability and Scalability. Proc. SPIE 2008, 7136, 71362J1–71362J12. [Google Scholar]
- Grobnic, D.; Smelser, C.W.; Mihailov, S.J.; Walker, R.B. “Long Term Thermal Stability Tests at 1000 °C of Silica fibre Bragg Gratings Made with Ultrafast Laser Radiation”. Meas. Sci. Technol 2006, 17, 1009–1013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | 0.1% | 0.05% | 0.01% |
|---|---|---|---|
| Pi | |||
| P1 | 0.019624 | 0.009905 | 0.001996 |
| P2 | 0.000157 | 3.96E-05 | 1.6E-06 |
| P3 | 6.29E-07 | 7.93E-08 | 6.39E-10 |
| P | 0.1% | 0.05% | 0.01% |
|---|---|---|---|
| Ai | |||
| A1 | 1 | 1 | 1 |
| A2 | 0.99996 | 0.999996 | 1 |
| A3 | 0.999999 | 1 | 1 |
| Scaling Degree | i = 1 | i = 2 | i = 3 |
|---|---|---|---|
| SSC | |||
| # of sensors | 20 | 84 | 340 |
| # of switches | 4 | 20 | 84 |
| Sensing Coverage | 10.28r2 | 46.84r2 | 193.08r2 |
| Scaling Degree | i = 1 | i = 2 | i = 3 |
|---|---|---|---|
| PSC | |||
| # of sensors | 25 | 75 | 625 |
| # of switches | 5 | 30 | 155 |
| Sensing Coverage | 14.43r2 | 61.33r2 | 311.00r2 |
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Peng, L.-M.; Li, X.-W.; Yang, W.-H.; Kim, Y.-C. Investigation on Reliability and Scalability of an FBG-Based Hierarchical AOFSN. Sensors 2010, 10, 2901-2918. https://doi.org/10.3390/s100402901
Peng L-M, Li X-W, Yang W-H, Kim Y-C. Investigation on Reliability and Scalability of an FBG-Based Hierarchical AOFSN. Sensors. 2010; 10(4):2901-2918. https://doi.org/10.3390/s100402901
Chicago/Turabian StylePeng, Li-Mei, Xin-Wan Li, Won-Hyuk Yang, and Young-Chon Kim. 2010. "Investigation on Reliability and Scalability of an FBG-Based Hierarchical AOFSN" Sensors 10, no. 4: 2901-2918. https://doi.org/10.3390/s100402901