A Gaussian Mixture Model-Based Continuous Boundary Detection for 3D Sensor Networks

Abstract
:
1. Introduction
2. Enhancement to BN Array
3. Problem
4. Boundary Detection for a 3D Sensor Network (BD3D)
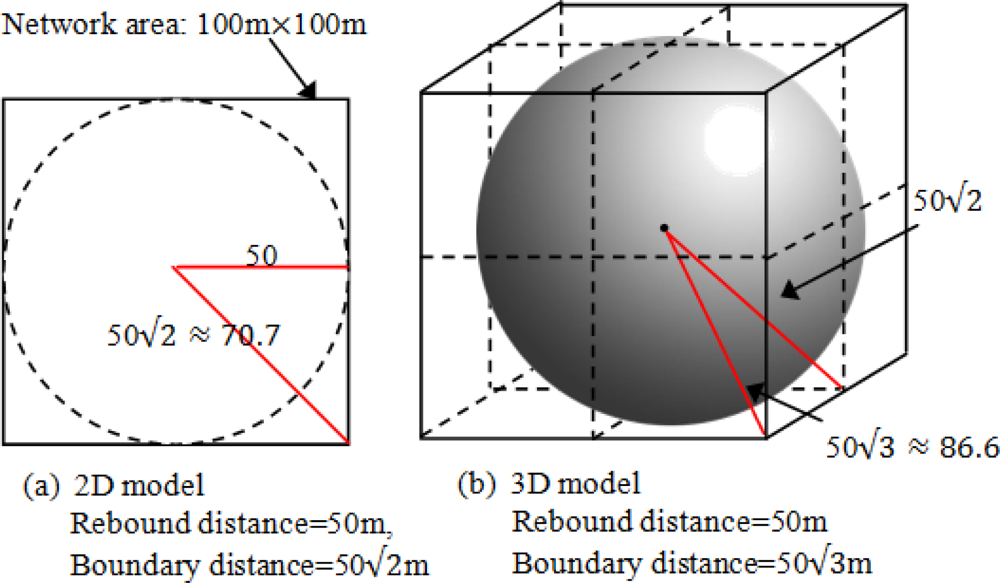
4.1. BD3D scheme in 2D model [D = 2 in (5)]
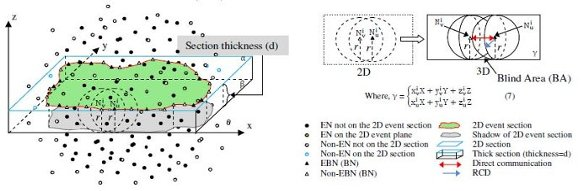
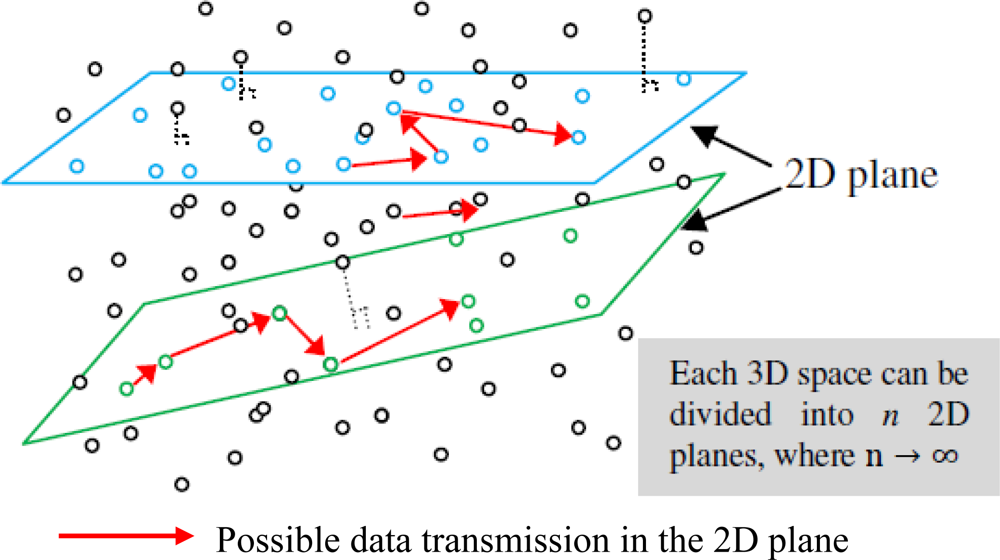
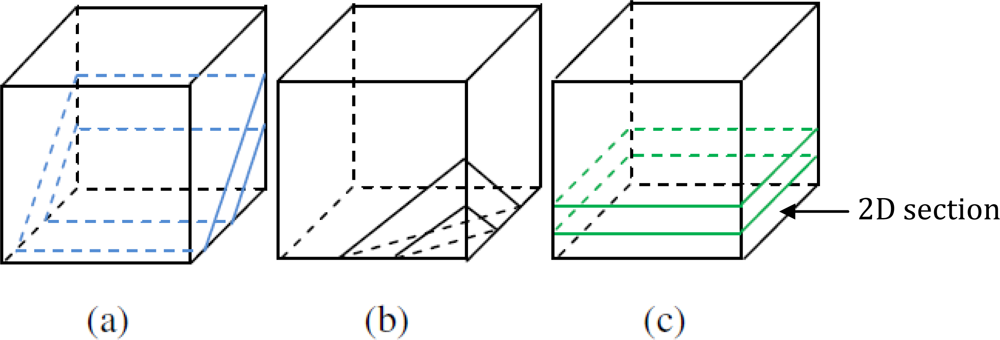
4.2. BD3D 3D model [D = 3 in (5)]
- Suppose and are arbitrary points (sensor nodes) on the formed 2D plane called “ρ”, the plane representation is (see Figure 7).
5. Simulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Network Area (2D,3D) | (100 m)2(100 m)3 |
| Number of sensor nodes(2D,3D) | 2,500,10,000 |
| The sink (2D,3D) | (50,175), (50,175,50) |
| Transmission range(2D) | 10 m |
| Time slots | 100 seconds |
| Initial Energy | 2J/battery |
| Message size | 100 Bytes |
| Eelec | 50 nJ/bit |
| Efs | 10 pJ/bit/m2 |
| δamp | 0.0013 pJ/bit/m4 |
| EDA | 5 nJ/bit/signal |
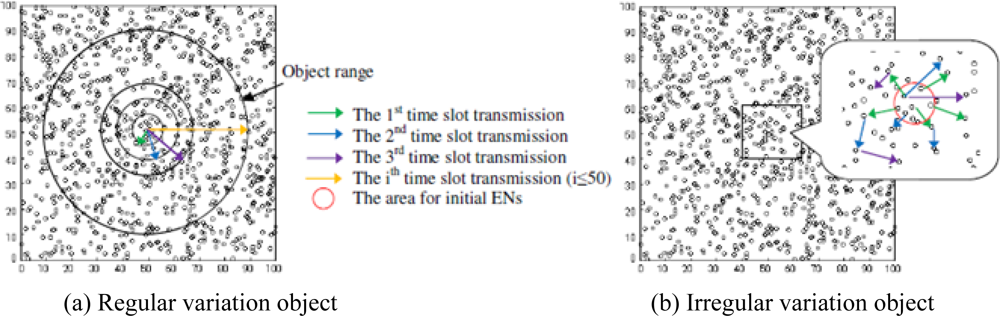
5.1. Simulation model
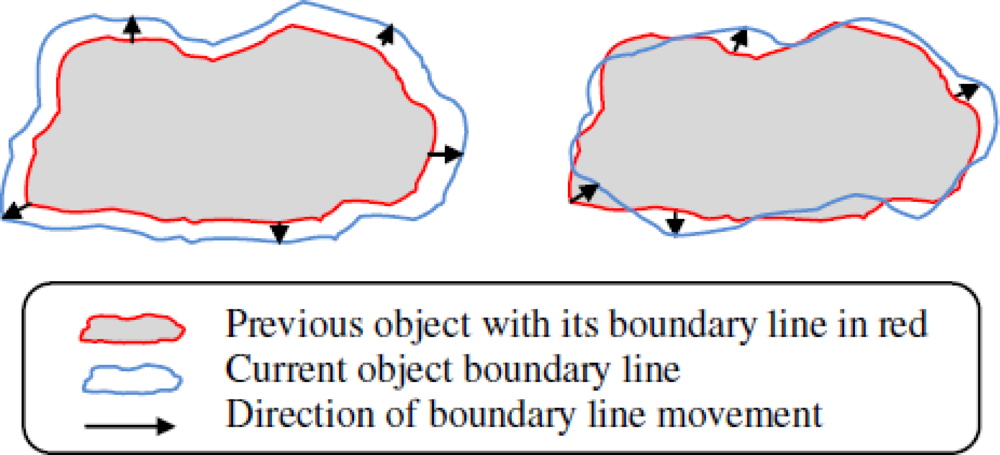
- Design a regular variation object: a circle initially centered at (50, 50) and continually expand it by increasing its radius by 10 meters every 10 time slots. (see Figure 9.)
- Design an irregular variation object: the initial ENs that adequately covers a circle area {(x − 50)2+(y−50)2 = Rcircle2} to initiate the event. At every time slot, EN propagates by picking up a random number of neighbors to join the event (non-EN→EN). In this way, the network is guaranteed to be fully connected. (see Figure 9.)
- Design a regular variation 3D object: the object center is (50, 50, 50) and continually expand its radius by 10 meters every 10 time slots.
- Design an irregular variation 3D object: the initial ENs are within a spherical area {(x − 50)2+(y − 50)2+(z − 50)2 = Rsphere2. EN propagates in a similar way as that used for the irregular variation object in 2D model.
5.2. BD3D 2D model
5.3. BD3D 3D model
6. Conclusions
Acknowledgments
References
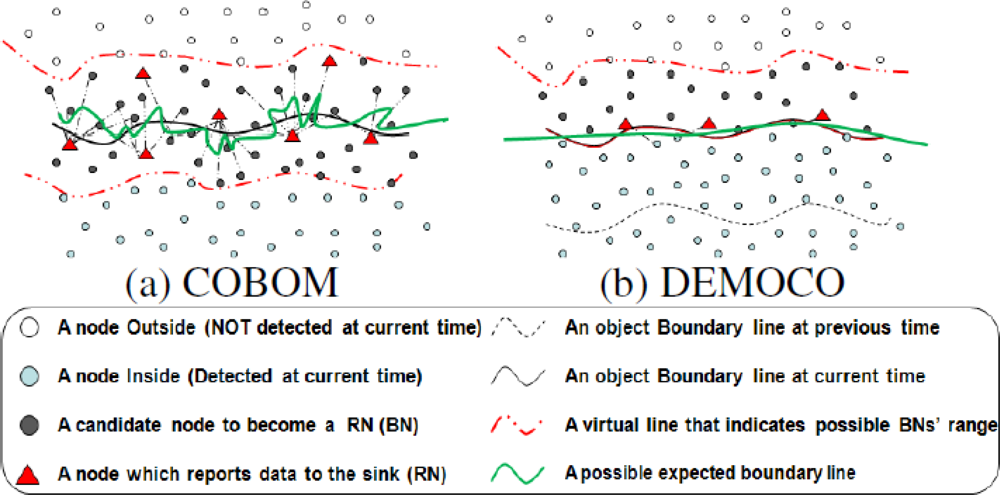
- Kim, JH; Kim, KB; Sajjad, HC; Yang, WC; Park, MS. DEMOCO: Energy-Efficient Detection and Monitoring for Continuous Objects in Wireless Sensor Networks. IEICE Trans Com 2008, E91–B, 3648–3656. [Google Scholar]
- Zhong, C; Worboys, M. Energy-efficient continuous boundary monitoring in sensor networks. Technical Report. 2007. Available online: http://ilab1.korea.ac.kr/papers/ref2.pdf/ (accessed on 31 July 2010).
- Basu, A; Jie, G; Joseph, SBM; Girishkumar, S. Distributed Localization by Noisy Distance and Angle Information. Proceedings of ACM MOBIHOC’06, Los Angeles, CA, USA; 2006; pp. 262–273. [Google Scholar]
- Eren, T; Goldenberg, DK; Whiteley, W; Yang, YR. Rigidity, Computation, and Randomization in Network Localization. Proceedings of IEEE INFOCOM’04, Hongkong, China, March 2004.
- He, T; Huang, CD; Blum, BM; John, AS; Tarek, A. Range-Free Localization Schemes for Large Scale Sensor Networks. Proceedings of ACM MOBICOM’03, Annapolis, MD, USA, June 2003; pp. 81–95.
- Nissanka, B; Priyantha Hari, B; Erik, D; Seth, T. Anchor-Free Distributed Localization in Sensor Networks. In LCS Technical Report #892; MIT: Cambridge, MA, USA, April 2003. [Google Scholar]
- Guo, Z; Zhou, M; Jiang, G. Adaptive optimal sensor placement and boundary estimation for dynamic mass objects. IEEE Trans. Syst. Man Cybern B. Cybern 2008, 38, 222–32. [Google Scholar]
- Olfati-Saber, R. Distributed tracking for mobile sensor networks with information driven mobility. Proceedings of Amer Control Conference, New York, NY, USA; July 2007; pp. 4606–4612. [Google Scholar]
- Funke, S; Klein, C. Hole Detection or: How Much Geometry Hides in Connectivity? Proceedings of the Twenty-Second Annual Symposium on Computational Geometry, SCG ’06; ACM Press: New York, NY, USA, 2006; pp. 377–385. [Google Scholar]
- Funke, S; Milosavljevic, N. Network sketching or: how much geometry hides in connectivity?–part ii. Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms (SODA2007), New Orleans, LA, USA; 2007; pp. 958–967. [Google Scholar]
- Peng, R; Sichitiu, ML. Angle of Arrival Localization for Wireless Sensor Networks. Proceedings of Third Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (Secon06), Reston, VA, USA, September 2006; pp. 25–28.
- Lance, D; Kristofer, SJP; Laurent, ELG. Convex Position Estimation in Wireless Sensor Networks. Proceedings of IEEE INFOCOM’01, Anchorage, AK, USA, April 2001.
- Hu, LX; David, E. Localization for Mobile Sensor Networks. Proceedings of ACM MOBICOM’04, Philadelphia, PA, USA, September 2004; pp. 45–57.
- Ji, X; Zha, H. Sensor Positioning in Wireless Ad-hoc Sensor Networks Using Multidimensional Scaling. Proceedings of INFOCOM’04, Hongkong, China, March 2004.
- Yi, S; Wheeler, R; Zhang, Y; Markus, PJF. Localization From Mere Connectivity. Proceedings of ACM MOBIHOC’03, Annapolis, MD, USA, June 2003; pp. 201–212.
- Yi, S; Wheeler, R. Improved MDS-Based Localization. Proceedings of IEEE INFOCOM’04, Hongkong, China, March 2004; pp. 2640–2651.
- Andreas, S; Park, H; Mani, BS. The Bits and Flops of the N-hop Multilateration Primitive for Node Localization Problems. Proceedings of ACM WSNA02, Atlanta, GA, USA, September 28, 2002; pp. 112–121.
- Zhang, LQ; Zhou, XB; Cheng, Q. Landscape-3D: A Robust Localization Scheme for Sensor Networks over Complex 3D Terrains. Proceedings of 31st Annual IEEE Conference on Local Computer Networks (LCN); IEEE Computer Society Press: Tampa, FL, USA, November 2006; pp. 239–246. [Google Scholar]
- Samitha, E; Pubudu, P. RSS Based Technologies in Wireless Sensor Networks, Mobile and Wireless Communications Network Layer and Circuit Level Design. Fares, SA, Fumiyuki Adachi, F, Eds.; INTECH Book: Vienna, Austria, 2010. [Google Scholar]
- Bulusu, N; Hohn, H; Deborah, E. Density Adaptive Algorithms for Beacon Placement in Wireless Sensor Networks. Proceedings of IEEE ICDCS’01, Phoenix, AZ, USA, April 2001.
- Liu, L; Wang, Z; Zhou, M. An Innovative Beacon-Assisted Bi-Mode Positioning Method in Wireless Sensor Networks. Proceedings of IEEE International Conference on Networking Sensing and Control (ICNSC09), Okayama, Japan, March 2009; pp. 570–575.
- Liu, L; Manli, E; Wang, ZG; Zhou, MC. A 3D Self-positioning Method for Wireless Sensor Nodes Based on Linear FMCW and TFDA. Proceedings of IEEE International Conference on Systems, Man, and Cybernetics, San Antonio, TX, USA, October 2009; pp. 3069–3074.
- Zhu, XJ; Rik, S; Gao, J. Segmenting a Sensor Field: Algorithm and Applications in Network Design. ACM Trans. Sensor Netw. (TOSN) 2009, 5, 1–31. [Google Scholar]
- McLachlan, G; Peel, D. Finite Mixture Models; John Wiley & Sons: New York: NY, USA, 2000. [Google Scholar]
- Figueiredo, M; Jain, AK. Unsupervised learning of finite mixture models. IEEE Trans. Patt. Anal. Mach. Int 2002, 24, 381–396. [Google Scholar]
- Akaike, H. Information Theory and an Extension of the Maximum Likelihood Principle. Proceedings of the Second International Symposium on Information Theory; Akadémiai Kiadó: Budapest, Hungary, 1973; pp. 267–281. [Google Scholar]
- Schwarz, G. Estimating the dimension of a model. Ann. Statist 1978, 6, 461–464. [Google Scholar]
- Solla, SA; Leen, TK; Muller, KR. The Infinite Gaussian Mixture Model. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2000; pp. 554–560. [Google Scholar]
- Chintalapudi, K; Govindan, R. Localized edge detection in sensor fields. IEEE Ad Hoc Netw J 2003, 59–70. [Google Scholar]
- Jin, G; Nittel, S. NED: An Efficient Noise-Tolerant Event and Event Boundary Detection Algorithm in Wireless Sensor Networks. Proceedings of the 7th International Conferences on Mobile Data Management, Nara, Japan, May, 2006; pp. 1551–6245.
- Min, D; Chen, D; Kai, X; Cheng, X. Localized Fault-Tolerant Event Boundary Detection in Sensor Networks. In IEEE Infocom. 2005; Miami, FL, USA, March 2005; pp. 902–913. [Google Scholar]
- Heinzelman, WR; Chandrakasan, A; Balakrishnan, H. Energy-Efficient Communication Protocol for Wireless Microsensor Networks. the Proceedings of the Hawaii International Conference on System Sciences, Maui, Hawaii, USA, January 4–7, 2000; pp. 3005–3014.
- Schwarz, G. Estimating the dimension of a model. Ann. Stat 1978, 6, 461–464. [Google Scholar]
- Zivkovic, Z; van der Heijden, F. Recursive Unsupervised Learning of Finite Mixture Models. Proceedings of IEEE Transactions on Pattern Analysis and Machine Intelligence, Washington, DC, USA, May 2004; pp. 651–656.
- Woo, A; Tong, T; Culler, D. Taming the underlying challenges of reliable multihop routing in sensor networks. Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA; 2003; pp. 14–27. [Google Scholar]
- Seada, AK; Zuniga, M; Helmy, A; Bhaskar, K. Energy-Efficient Forwarding Strategies for Geographic Routing in Lossy Wireless Sensor Networks. Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 2004; pp. 108–121.














| Sensor reading of Nv (head) | Sensor readings of ξ(Nv)(rear) |
| BD3D BN Array | ||||||
|---|---|---|---|---|---|---|
| EN | Non-EN | BN | Non-BN | |||
| EBN | Non-EBN | |||||
| Head | 1 | 0 | 1 | 1 | 0 | 1 |
| HR | random | random | All 0 & random | All 1 | All 0 | All 1 |
| 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chen, J.; Salim, M.B.; Matsumoto, M. A Gaussian Mixture Model-Based Continuous Boundary Detection for 3D Sensor Networks. Sensors 2010, 10, 7632-7650. https://doi.org/10.3390/s100807632
Chen J, Salim MB, Matsumoto M. A Gaussian Mixture Model-Based Continuous Boundary Detection for 3D Sensor Networks. Sensors. 2010; 10(8):7632-7650. https://doi.org/10.3390/s100807632
Chicago/Turabian StyleChen, Jiehui, Mariam B. Salim, and Mitsuji Matsumoto. 2010. "A Gaussian Mixture Model-Based Continuous Boundary Detection for 3D Sensor Networks" Sensors 10, no. 8: 7632-7650. https://doi.org/10.3390/s100807632
APA StyleChen, J., Salim, M. B., & Matsumoto, M. (2010). A Gaussian Mixture Model-Based Continuous Boundary Detection for 3D Sensor Networks. Sensors, 10(8), 7632-7650. https://doi.org/10.3390/s100807632