Use of a Terrestrial LIDAR Sensor for Drift Detection in Vineyard Spraying



Abstract
:
1. Introduction
2. Material and Methods
2.1. Sprayers Adjustment
2.2. Spray Liquid and Tracer Concentration
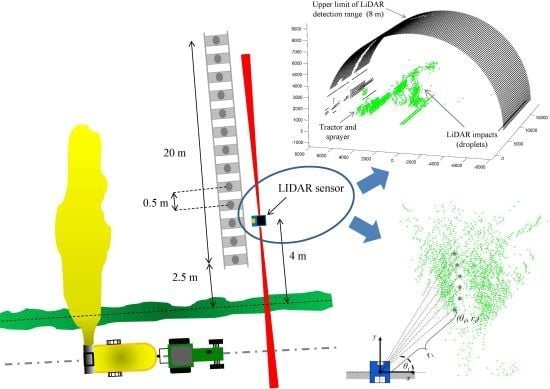
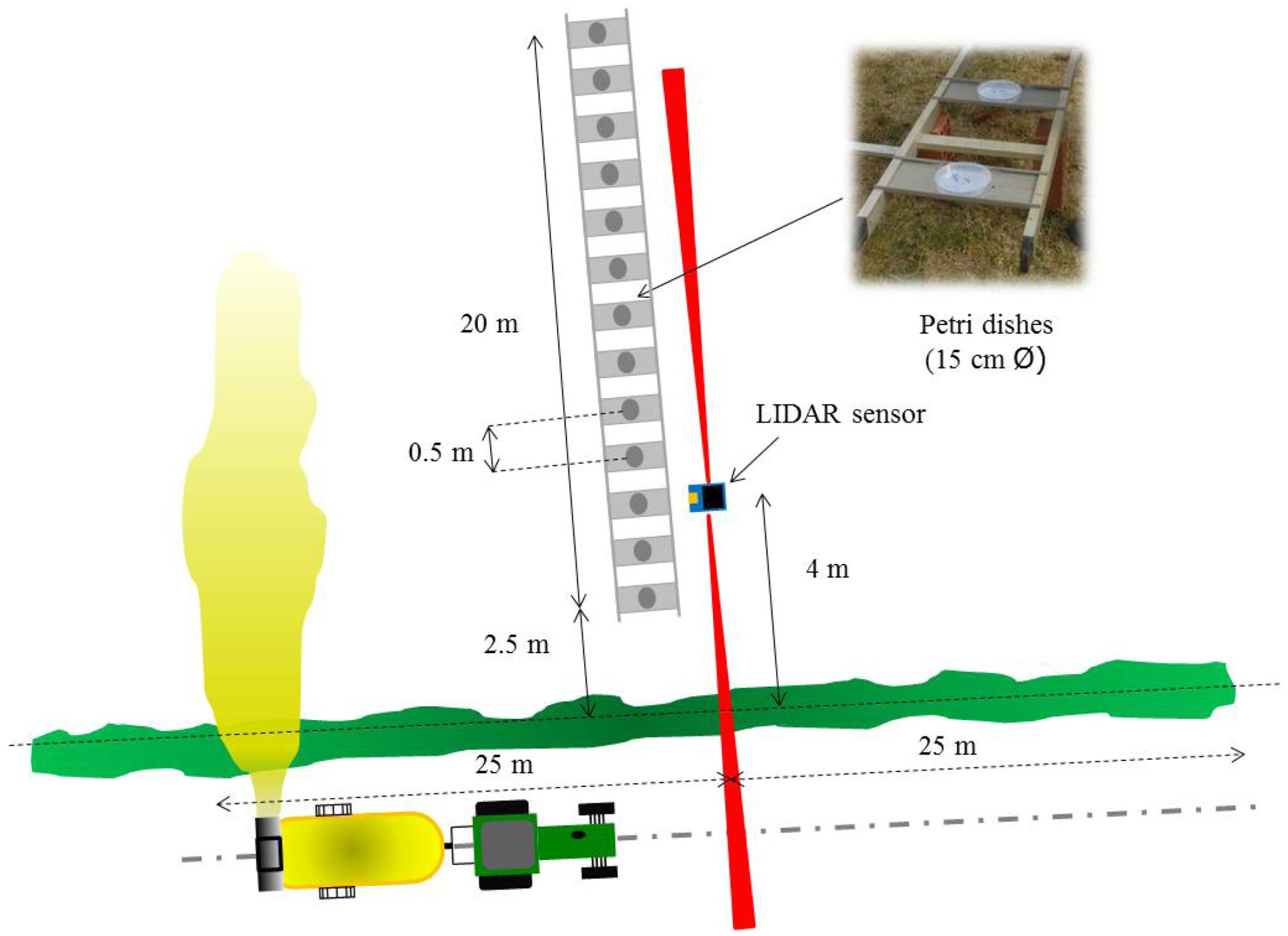
2.3. Drift Detection Measurements
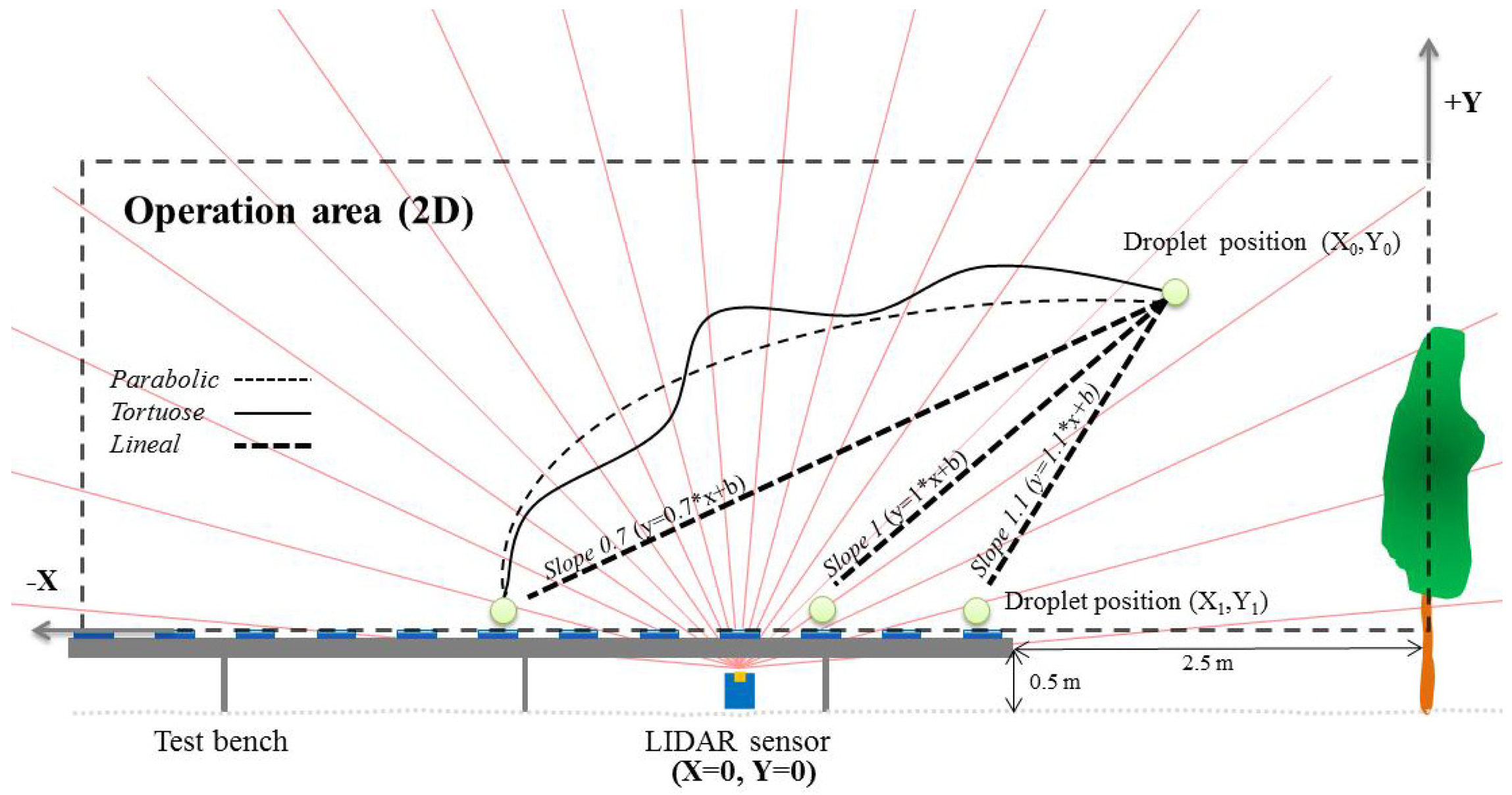
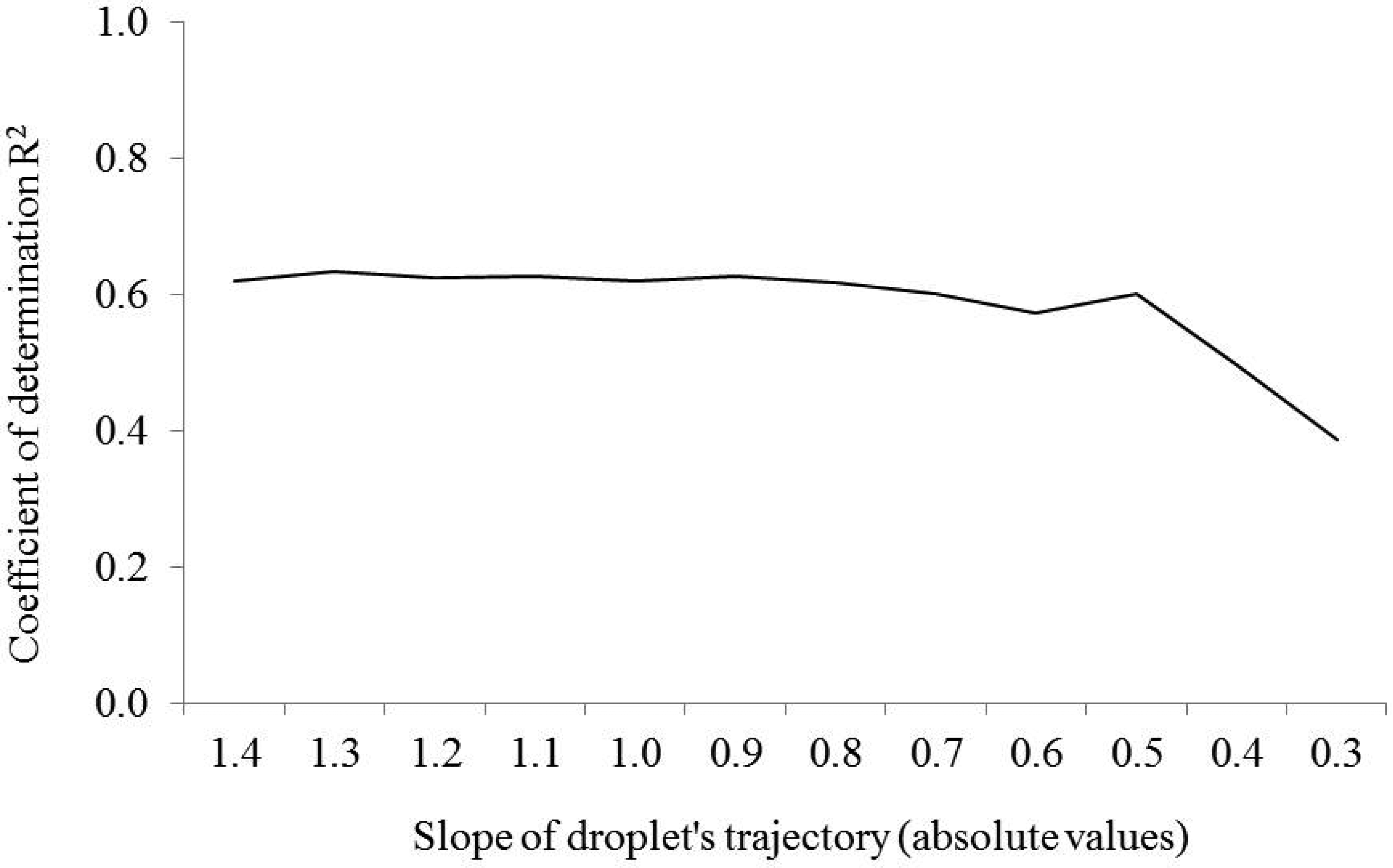
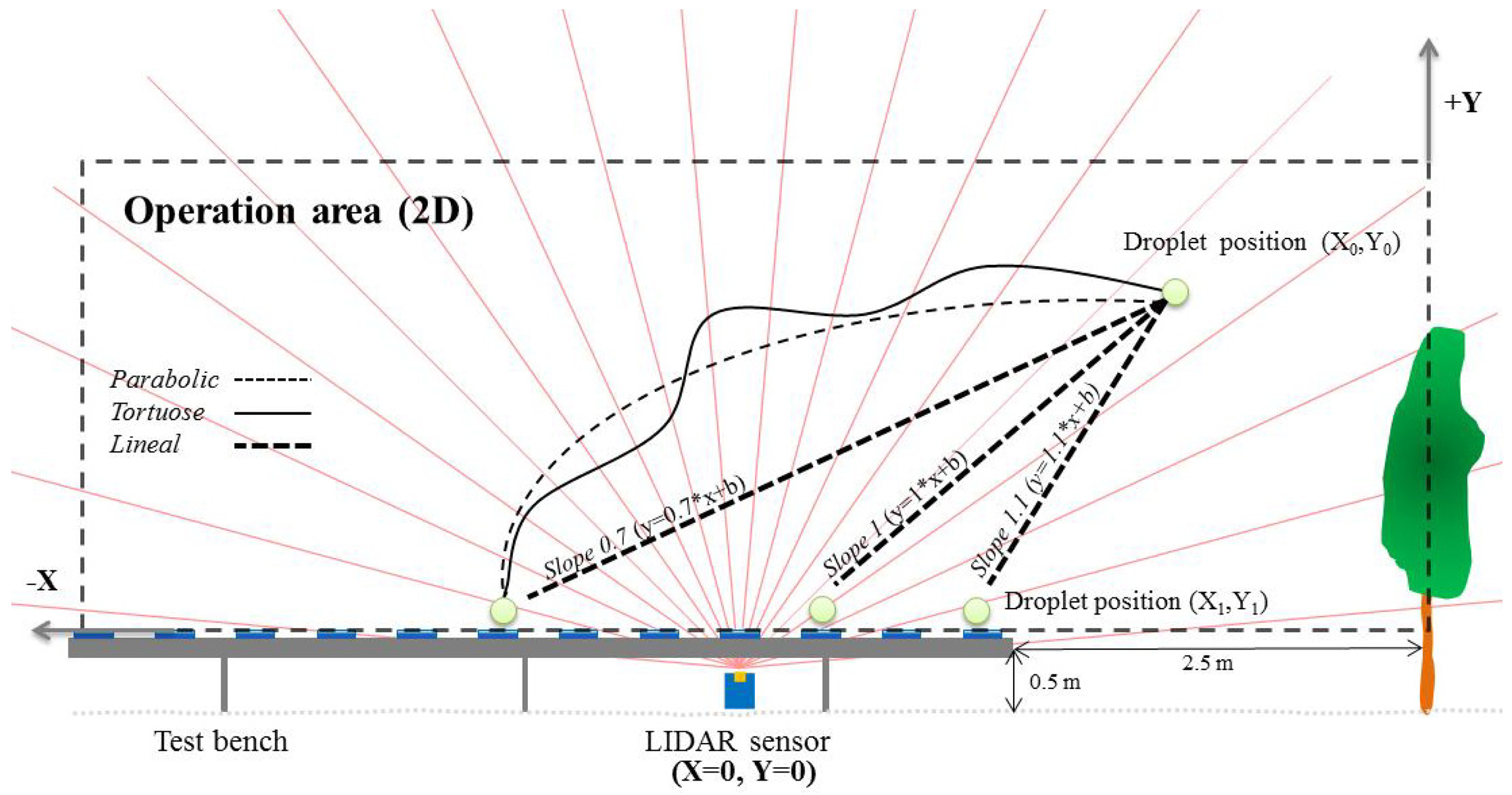
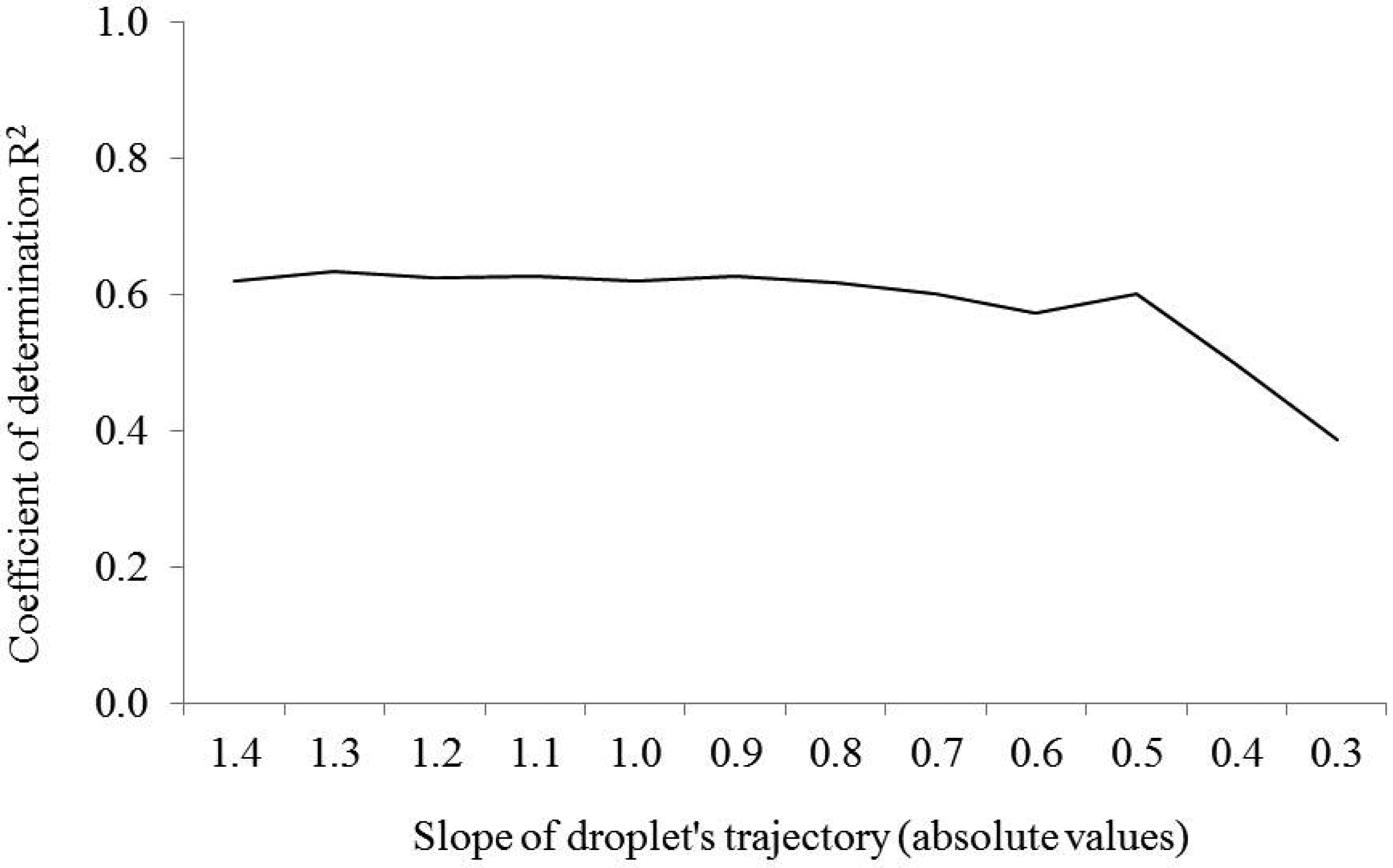
2.4. Relationship between LIDAR Data and Deposition on Test Bench
3. Results and Discussion
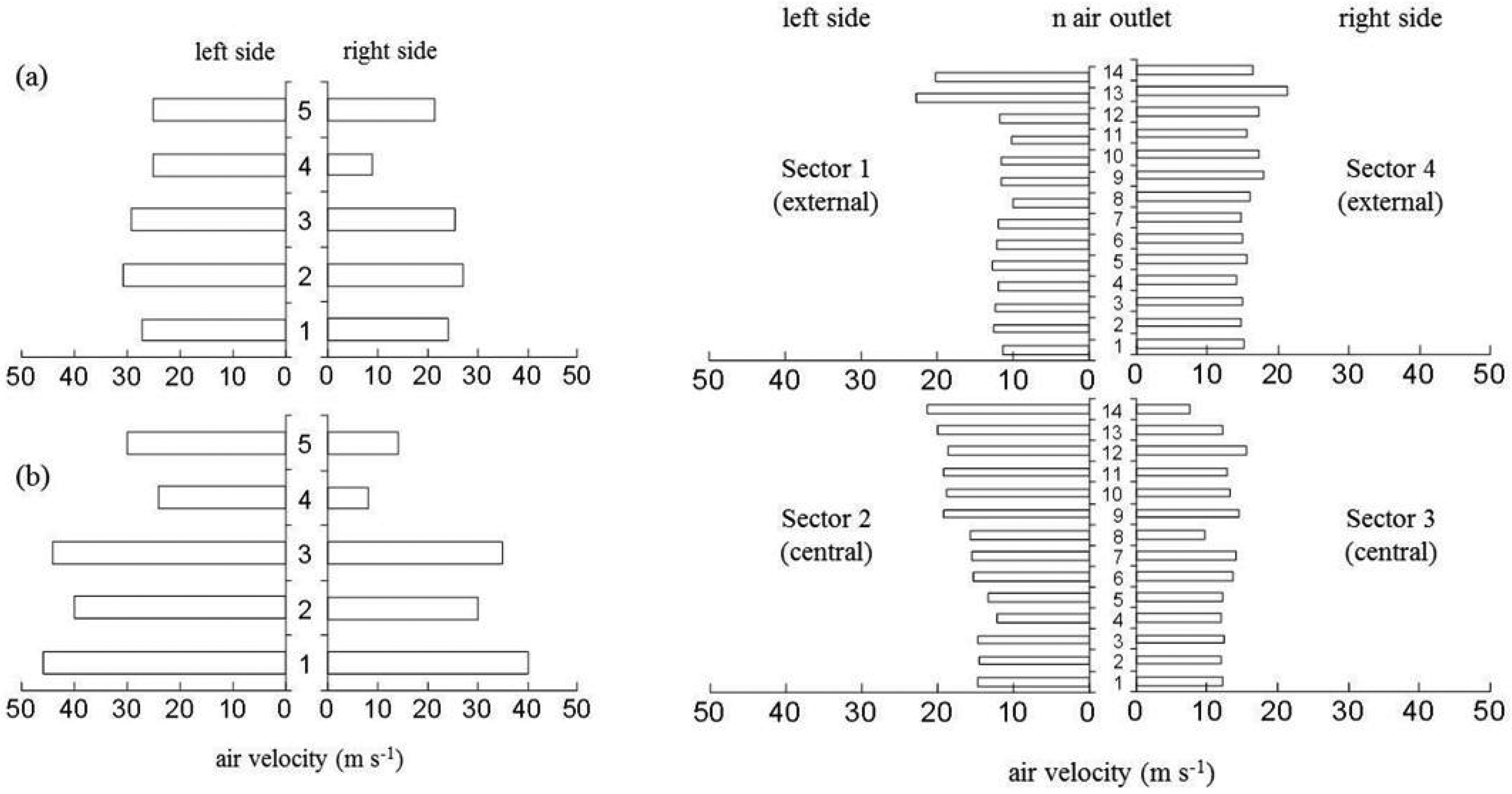
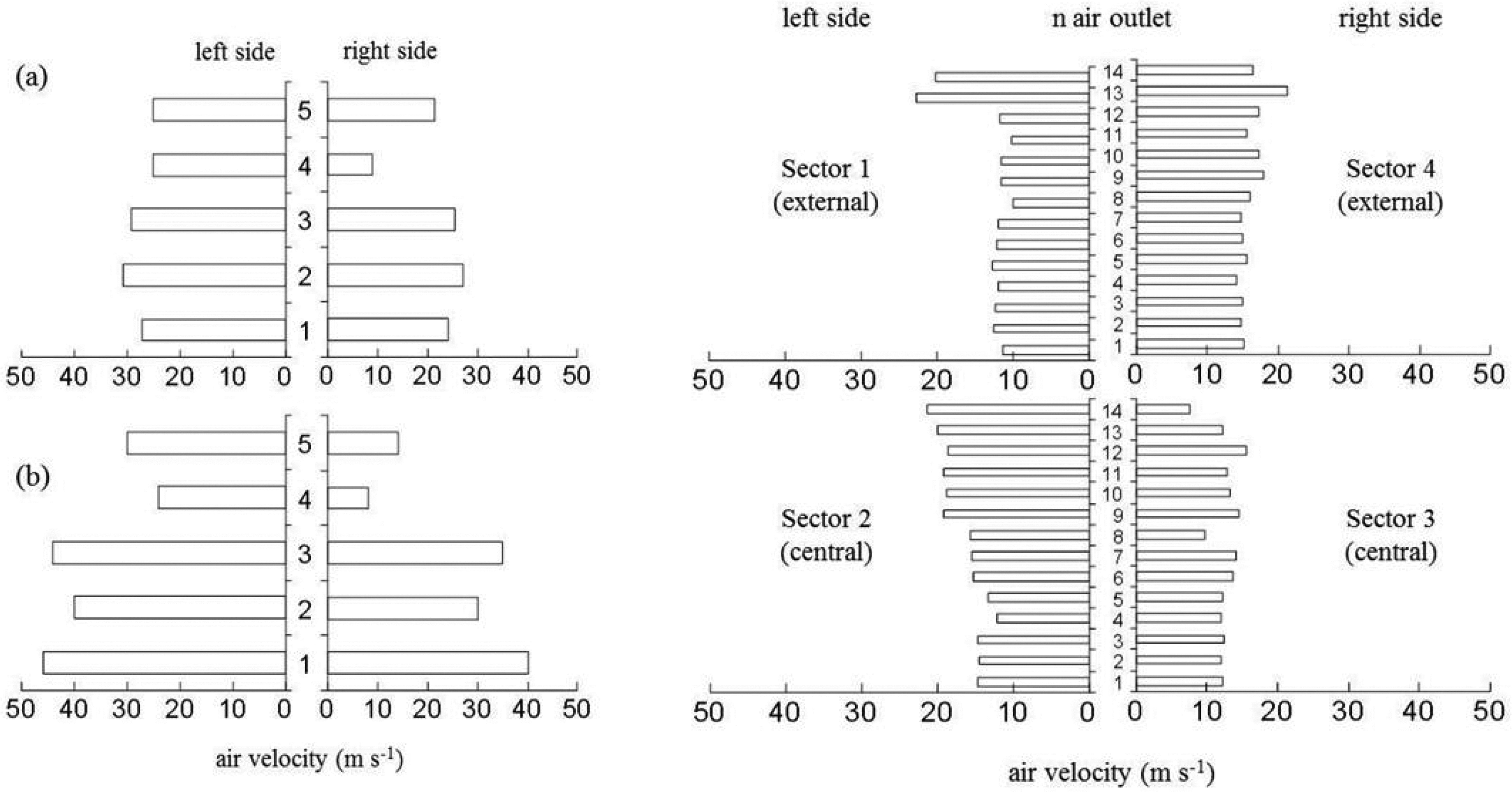
3.1. Air Velocity and Air Profile of the Two Tested Sprayers
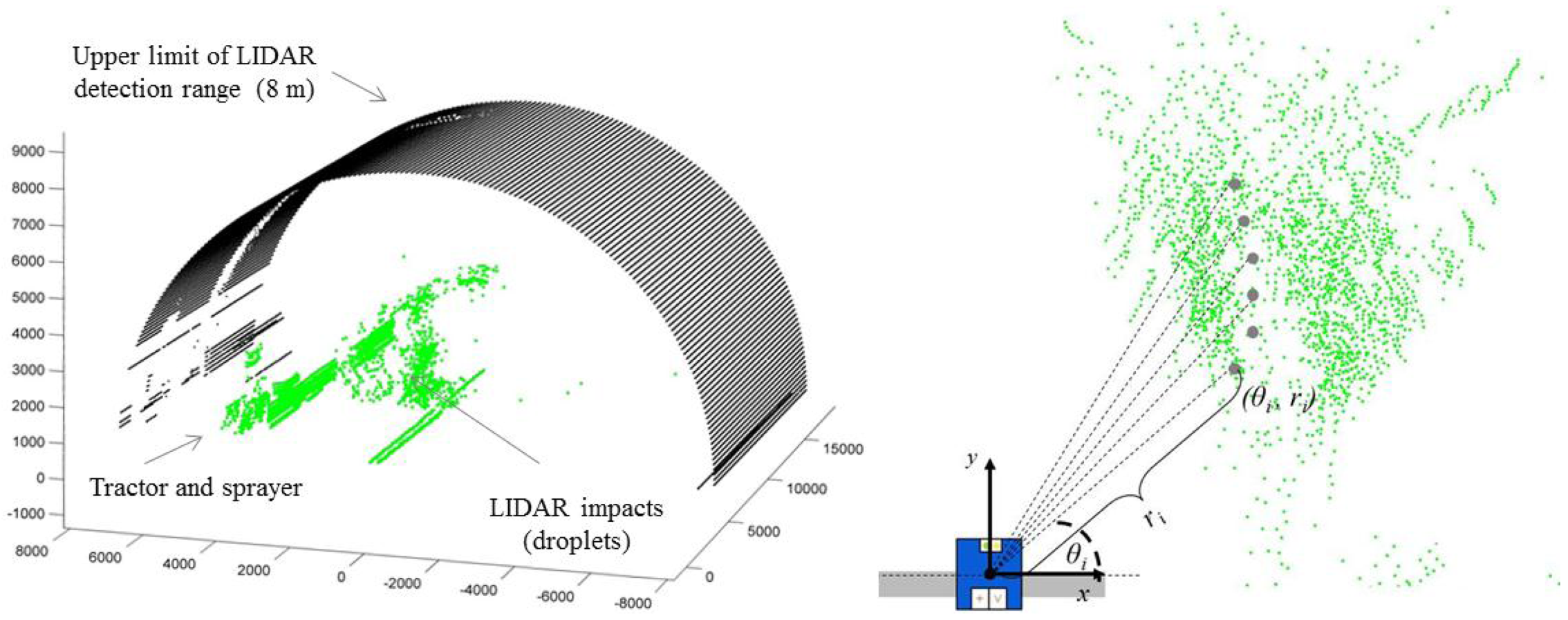
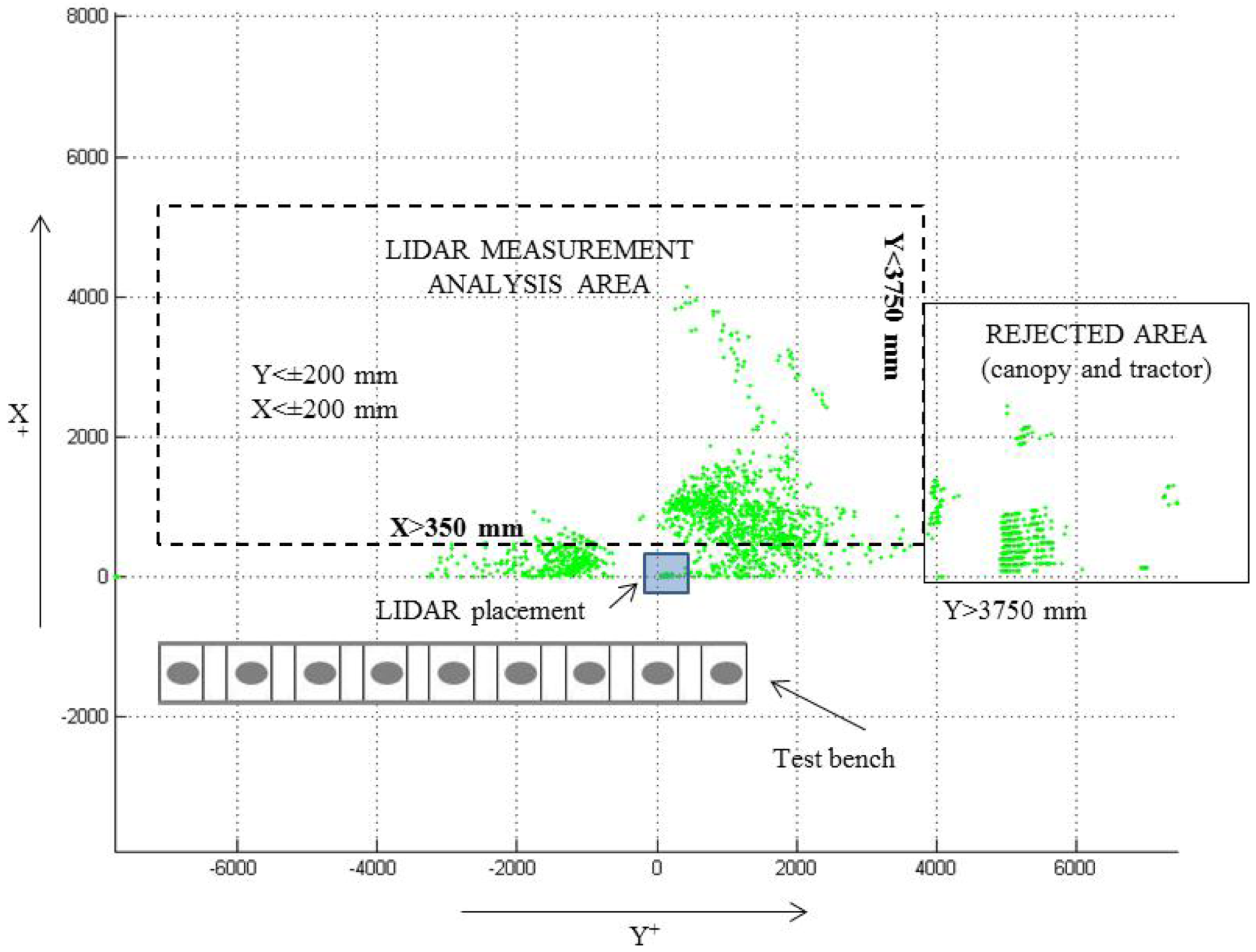
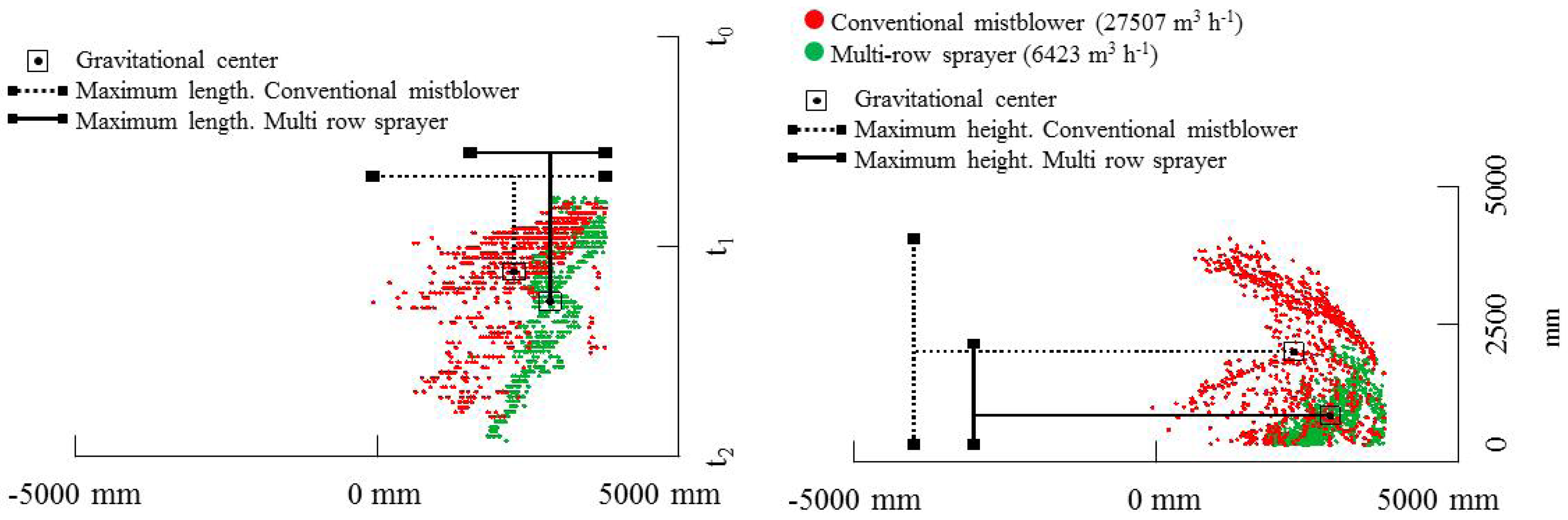
3.2. Determination of Drift Potential through LIDAR Impacts Evaluation
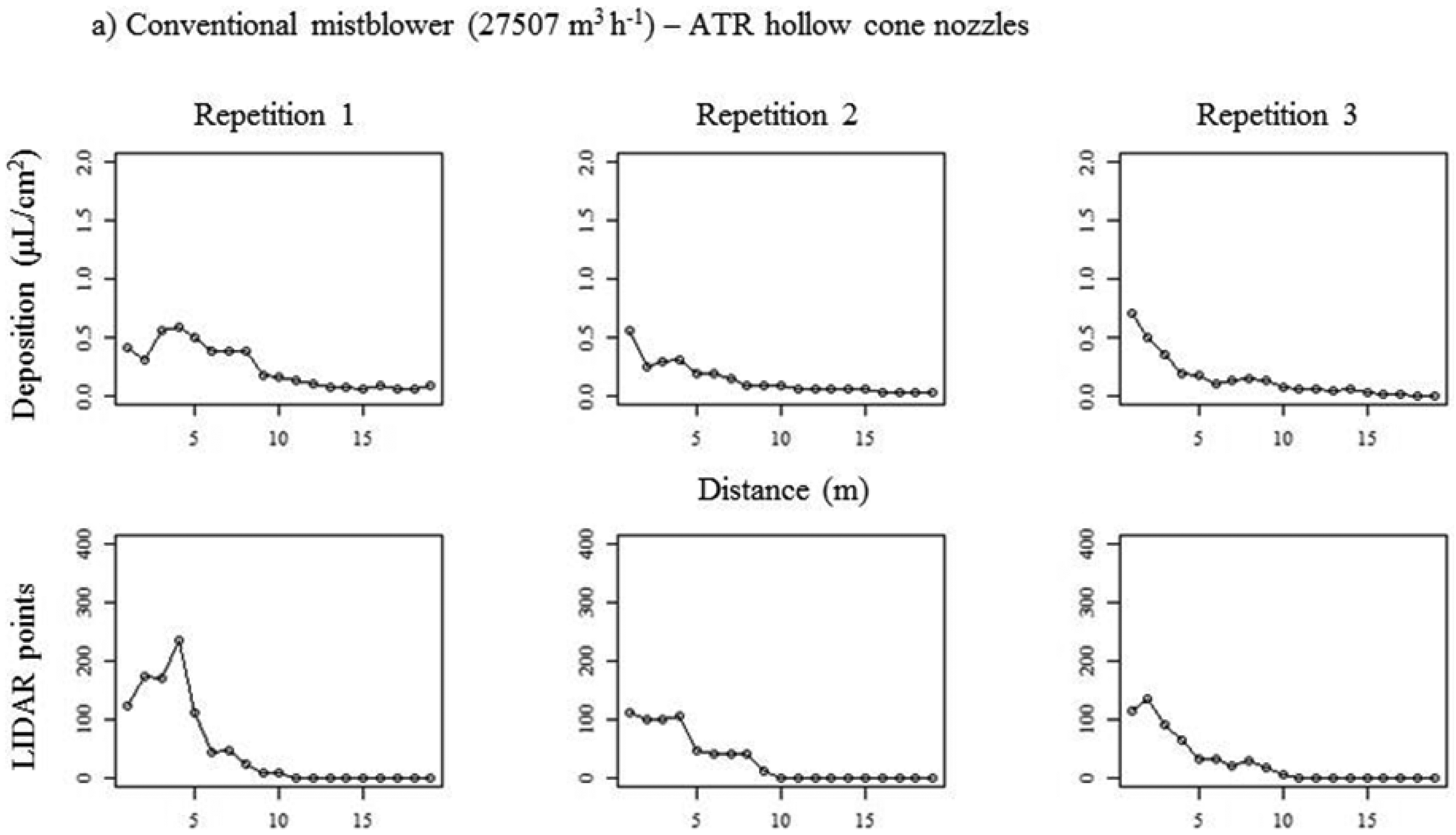
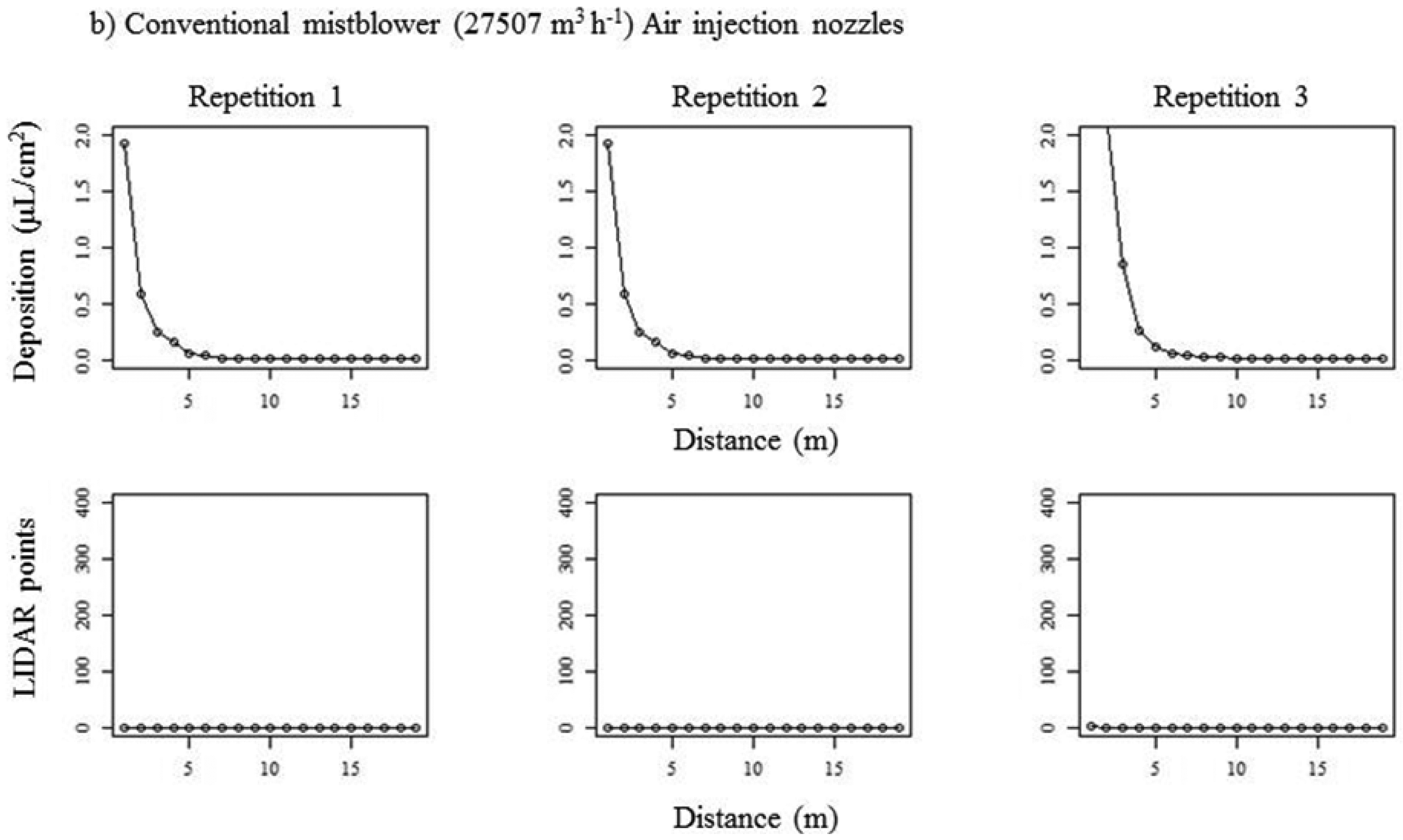
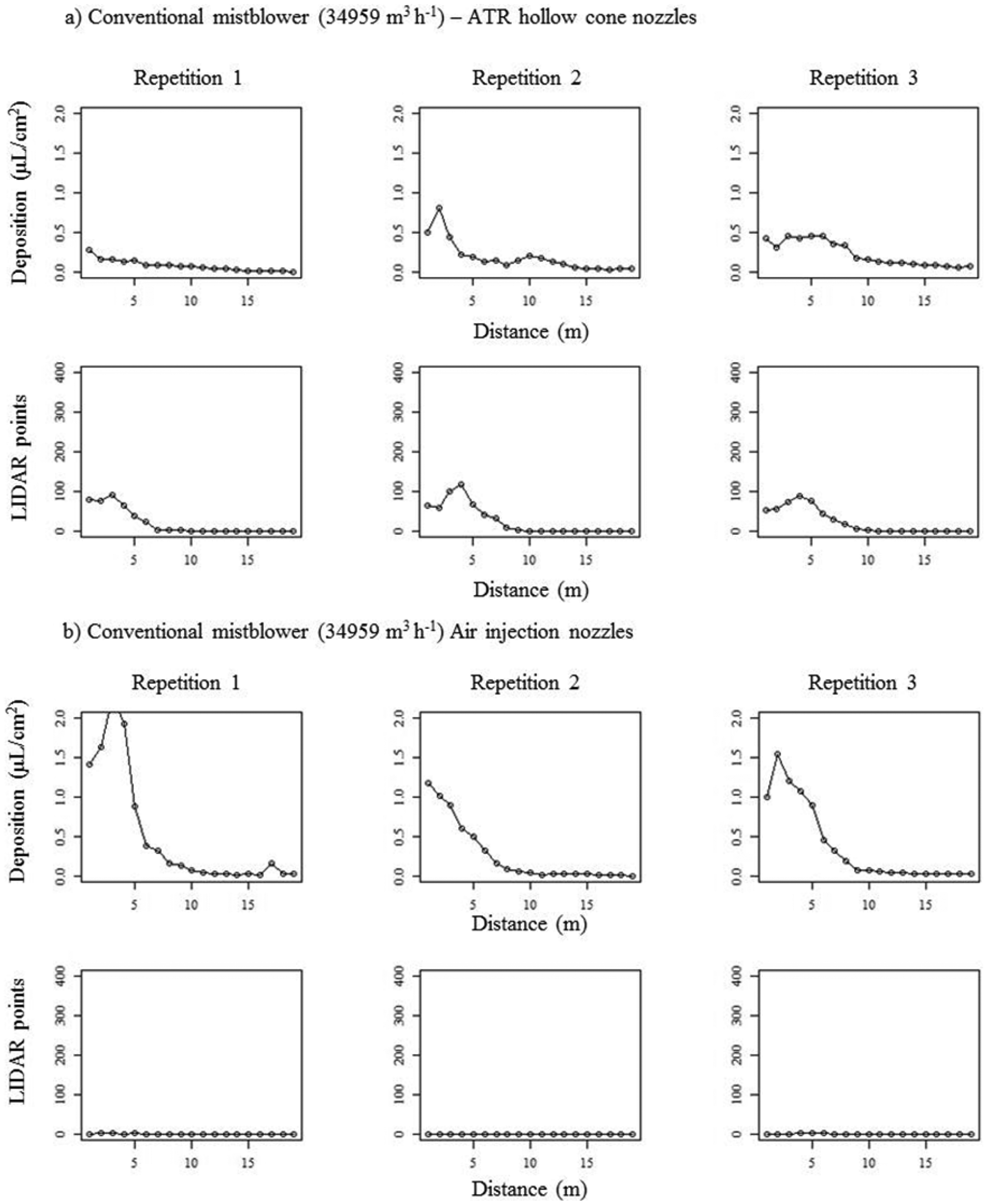
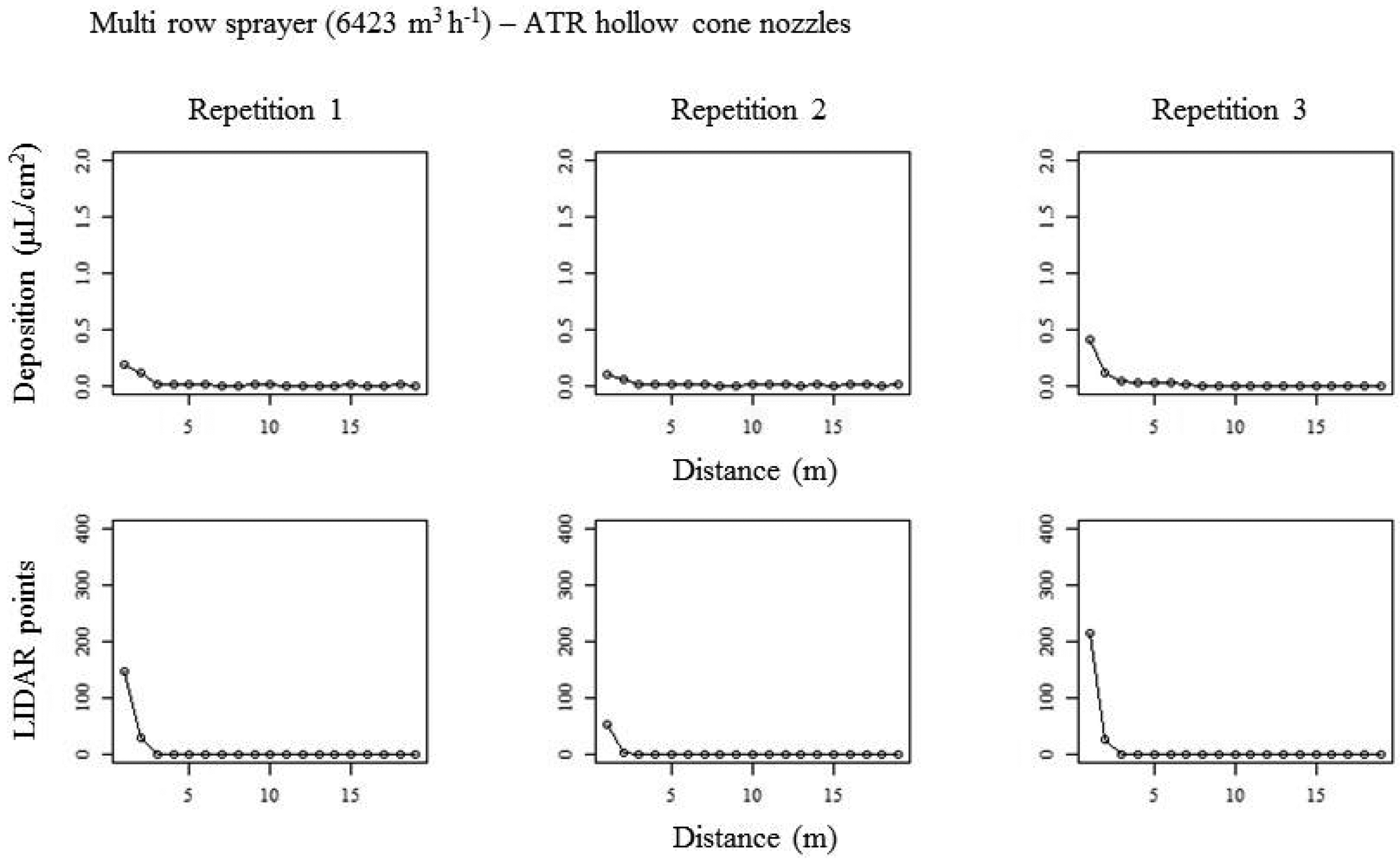
3.3. Deposition Curves with LIDAR and Test Bench
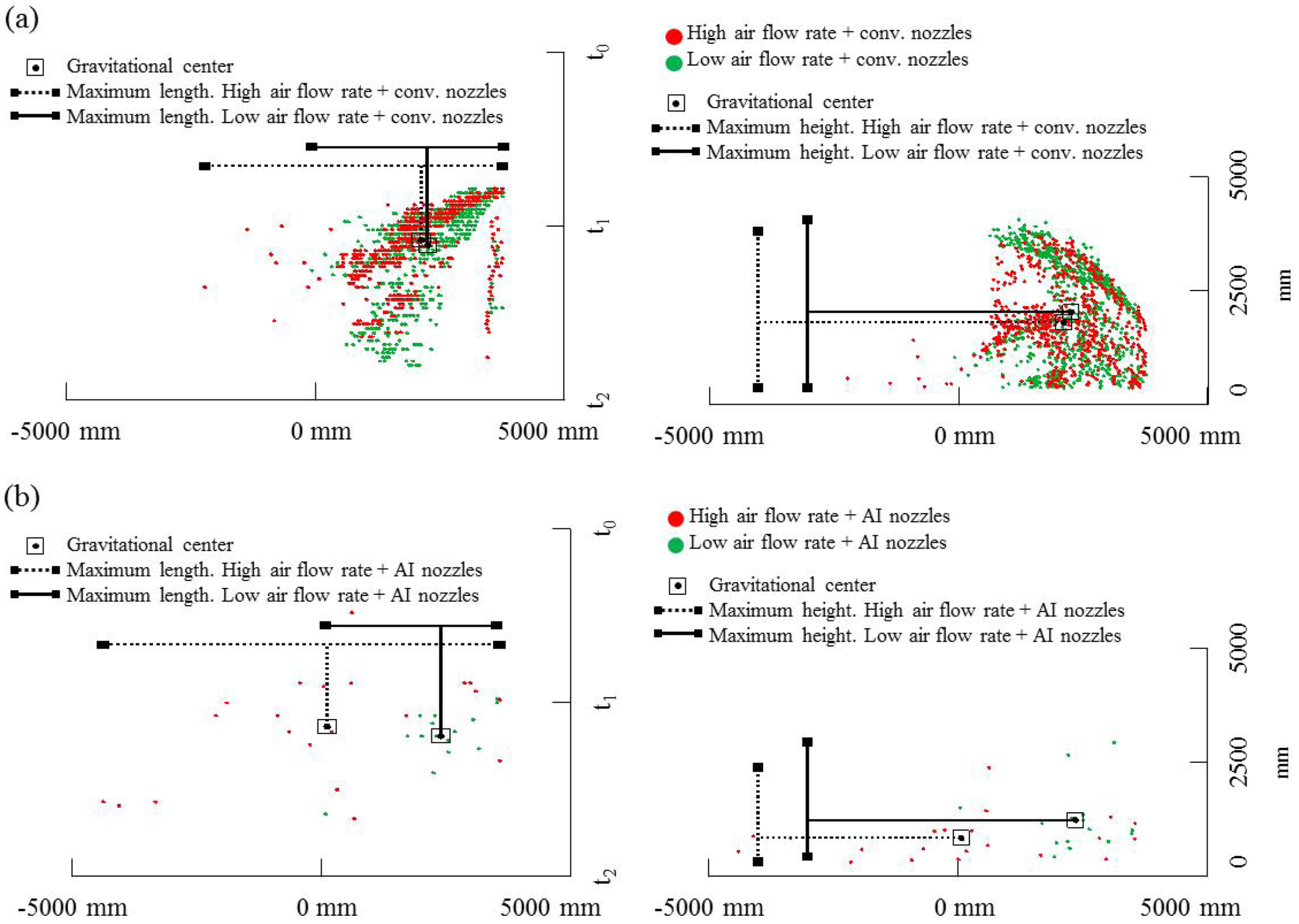
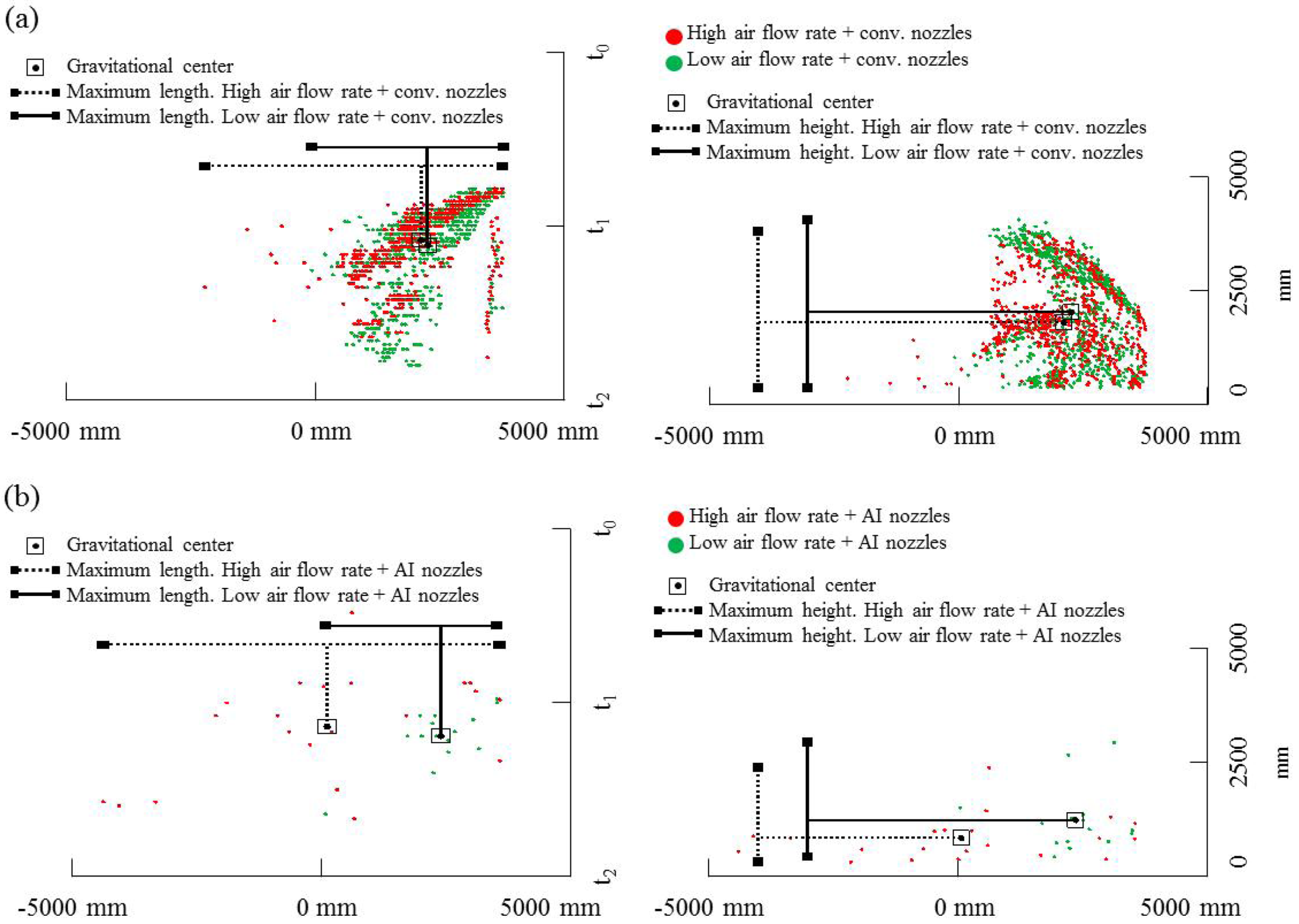
Moreover, it is worth noting in this case the good correlation calculated between the two proposed methods, with values of correlation coefficient higher than 0.90 in all cases (Table 3). The interpretation of Figures 10, 11 and 12 must be done taking into account that LIDAR measurements allows to obtain values of impact's density, being those values linked to the amount of liquid exceeding the canopy target. Nevertheless, LIDAR measurements cannot be linked to droplet size [34].
4. Conclusions
Acknowledgments
References
- Nuyttens, D.; Schampheleire, M.D.; Baetens, K.; Sonck, B. The influence of operator-controlled variables on spray drift from field crop sprayers. Trans. ASABE 2007, 50, 1129–1140. [Google Scholar]
- European Parliament. Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 Establishing a Framework for Community Action to Achieve the Sustainable Use of Pesticides, 2009/128/EC, 2009.
- ISO TC 23/SC 06 N 22866. Equipment for Crop Protection—Methods for the Field Measurement of Spray Drift.
- Miller, D.R.; Salyani, M.; Hiscox, A.L. Remote Measurement of Spray Drift from Orchard Sprayers Using LIDAR. Proceedings of the American Society of Agricultural and Biological Engineers, Las Vegas, NV, USA, 27– 30 July 2003. Annual Meeting Paper No. 031093.
- Wang, M.; Rautmann, D. A simple probabilistic estimation of spray drift-factors determining spray drift and development of a model. Environ. Toxicol. Chem. 2008, 27, 2617–2626. [Google Scholar]
- Ganzelmeier, H.; Rautmann, D.; Spangenberg, R.; Streloke, M.; Herrmann, M.; Wenzelburger, H.J.; Walter, H.F. Studies on spray drift of plant protection products. Mitt. Biol. Bundesanst. Land. Forstwirtsch. Berl. Dahl. 1995, 305, 1–111. [Google Scholar]
- Rautmann, D.; Streloke, M.; Winkler, R. New basic drift values in the authorization procedure for plant protection products. Mitt. Biol. Bundesanst. Land.-Forstwirtsch. Berl.-Dahl. 2001, 383, 133–141. [Google Scholar]
- Arvidsson, T.; Bergström, L.; Kreuger, J. Spray drift as influenced by meteorological and technical factors. Pest. Manag. Sci. 2011, 67, 586–598. [Google Scholar]
- Van De Zande, J.C.; Michielsen, J.M.P.G.; Stallinga, H.; Porskamp, H.A.J.; Holterman, H.J.; Huijsman, J F M. Spray Distribution When Spraying Potatoes with a Conventional or an AirAssisted Field Boom Sprayer. ASAE 2002. Paper No. 021003. [Google Scholar]
- Ozkan, H.E. Effects of major variables on drift distances of spray droplets. Food Agric. Biol. Eng. 1998, AEX, 525–598. [Google Scholar]
- Balsari, P.; Marucco, P.; Tamagnone, M. Technical note: A system to assess the mass balance of spray applied to tree crops. Trans. ASAE 2005, 48, 1689–1694. [Google Scholar]
- Van De Zande, J.C.; Porskamp, H.A.J.; Michielsen, P.J.M.G.; Holterman, H.J.; Huijsmans, J.F.M. Classification of spray applications for driftability, to protect surface water. Aspect. Appl. Biol. 2000, 57, 57–65. [Google Scholar]
- Arvidsson, T.; Bergström, L.; Kreuger, J. Comparison of collectors of airborne spray drift. Experiments in a wind tunnel and field measurements. Pest Manag. Sci. 2011, 67, 725–733. [Google Scholar]
- Solanelles, F.; Gregorio, E.; Sanz, R.; Rosell, J.R.; Arnó, J.; Planas, S.; Escolà, A.; Masip, J.; Ribes-Dasi, M.; Gracia, F.; Camp, F. Spray Drift Measurements in Tree Crops Using a Lidar System. Proceedings of 10th Workshop on Spray Application Techniques in Fruit Growing, Wageningen, The Netherlands, 30 September– 2 October 2009; pp. 40–41.
- Donkersley, P.; Nuyttens, D. A meta analysis of spray drift sampling. Crop. Prot. 2011, 30, 931–936. [Google Scholar]
- Nuyttens, D.; de Schampheleire, M.; Baetens, K.; Brusselman, E.; Dekeyser, D.; Verboven, P. Drift from field crop sprayers using an integrated approach: Results of a five-year study. Trans. ASABE 2011, 54, 403–408. [Google Scholar]
- Holterman, H.; Van de Zande, J.C.; Porskamp, H.A.J.; Huijsmans, J.F.M. Modeling spray drift from boom sprayers. Comput. Electron. Agric. 1997, 19, 1–22. [Google Scholar]
- Hobson, P.A.; Miller, P.C.H.; Walklate, P.J.; Tuck, C.R.; Western, N.M. Spray drift from hydraulic spray nozzles: The use of a computer simulation model to examine factors influencing drift. J. Agric. Eng. Res. 1993, 54, 293–305. [Google Scholar]
- Nuyttens, D.; De Schampheleire, M.; Steurbaut, W.; Baetens, K.; Verboven, P.; Nicolai, B.; Ramon, H.; Sonck, B. Experimental study of factors influencing the risk of drift from field sprayers, Part 1: Meteorological conditions. Aspect. Appl. Biol. 2006, 77, 321–330. [Google Scholar]
- Balsari, P.; Marucco, P.; Tamagnone, M. A test bench for the classification of boom sprayers according to drift risk. Crop. Prot. 2007, 26, 1482–1489. [Google Scholar]
- Vanella, G.; Salyani, M.; Balsari, P.; Futch, S.H.; Sweeb, R.D. A method for assessing drift potential of a citrus herbicide applicator. HortTech. 2011, 21, 745–751. [Google Scholar]
- Hiscox, A.L.; Miller, D.R.; Nappo, C.J.; Ross, J. Dispersion of fine spray from aerial applications in stable atmospheric conditions. Trans. ASABE 2006, 49, 1513–1520. [Google Scholar]
- Hoff, R.M.; Mickle, R.E.; Froude, F.A. A rapid acquisition LIDAR system for aerial spray diagnostics. Trans. ASABE 1989, 51, 1523–1528. [Google Scholar]
- Stoughton, T.E.; Miller, D.E.; Yang, X.; Kirk, M.; Ducharme, K.M. A comparison of spray drift predictions to LIDAR data. Agric. For. Meteorol. 1997, 88, 15–26. [Google Scholar]
- Walklate, P.J. Modelling Canopy Interactions for Drift Mitigation. Proceedings of the International Conference on Pesticide Application for Drift Management, Waikoloa, HI, USA, 27–29 October 2004; pp. 370–377.
- Miller, D.R.; Stoughton, T.E. Response of spray drift from aerial applications at a forest edge to atmospheric stability. Agric. For. Meteorol. 2000, 100, 49–58. [Google Scholar]
- Lavrov, A.; Utkin, A.B.; Vilar, R.; Fernandes, A. Evaluation of smoke dispersion from forest fire plumes using lidar experiments and modeling. Int. J. Therm. Sci. 2006, 45, 848–859. [Google Scholar]
- Khot, L.R.; Miller, D.R.; Hiscox, A.L.; Salyani, M.; Walker, T.W.; Farooq, M. Lidar extrapolation of droplet catch measurements in aerosol application treatments. At. Sprays 2011, 21, 149–158. [Google Scholar]
- Meier, U. Growth Stages of Mono- and Dicotyledonous-Plants. BBCH Monograph; Meier, U., Ed.; Federal Biological Research Centre for Agriculture and Forestry: Berlin, Germany, 2001, 2nd ed. Available online: http://www.jki.bund.de/fileadmin/dam_uploads/_veroeff/bbch/BBCH-Skala_englisch.pdf (accessed on 15 December 2012).
- Doble, S.J.; Matthews, G.A.; Rutherford, I.; Southcombe, E.S.E. A system for classifying hydraulic nozzles and other atomizers into categories of spray quality. Proceedings of the British Crop Protection Conference—Weeds, Brighton, UK, 18–21 November 1985; Volume 9A.6. pp. 1125–1133.
- Van de Zande, J.C.; Holterman, H.J.; Wenneker, M. Nozzle classification for drift reduction in orchard spraying: Identification of drift reduction class threshold nozzles. Agric. Eng. Int.: CIGR J. 2008, X. Manuscript ALNARP 08 0013. [Google Scholar]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods. Sensors 2011, 11, 2177–2194. [Google Scholar]
- Llorens, J.; Gil, E.; Llop, J.; Queraltó, M. Georeferenced LIDAR 3D vine plantation map generation. Sensors 2011, 11, 6237–6256. [Google Scholar]
- Sanz-Cortiella, R.; Llorens-Calveras, J.; Rosell-Polo, J.R.; Gregorio-Lopez, E.; Palacin-Roca, J. Characterisation of the LMS200 laser beam under the influence of blockage surfaces. Influence on 3D scanning of tree orchards. Sensors 2011, 11, 2751–2772. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sprayer | Air flow | Nozzle type (n°) | Pressure (bar) | Droplet size (1) | Application rate | ||
|---|---|---|---|---|---|---|---|
| m·s−1 | m3·h−1 | L·min−1 (2) | L·ha−1 | ||||
| Master 2000 | 24.4 | 27,507 | ATR yellow (10) | 8.0 | VF | 0.92 | 369 |
| 27,507 | TVI 80015 (10) | 8.0 | C | 0.98 | 393 | ||
| Master 2000 | 31.1 | 34,959 | ATR yellow (10) | 8.0 | VF | 0.92 | 369 |
| 34,959 | TVI 80015 (10) | 8.0 | C | 0.98 | 393 | ||
| Iris-2 | 14.6 | 6,423 | ATR orange (16) | 8.0 | VF | 1.24 | 398 |
| Test | Nozzle Type | Air Flow | Rep | RH (%) | TM (*C) | WND (°) | WNG km·h−1 | WNS km·h−1 | DEW °C |
|---|---|---|---|---|---|---|---|---|---|
| Master 2000 | ATR | Low | 1 | 78.6 | 20.2 | 149 | 0 | 0 | 16.4 |
| 2 | 81.6 | 19.7 | 190 | 0 | 0 | 16.5 | |||
| 3 | 81.9 | 19.8 | 158 | 0 | 0 | 16.6 | |||
| TVI | Low | 1 | 78.6 | 20.8 | 158 | 0 | 0 | 17.0 | |
| 2 | 76.5 | 21.1 | 84 | 0 | 0 | 16.9 | |||
| 3 | 75.7 | 21.6 | 46 | 1 | 0 | 17.2 | |||
| ATR | High | 1 | 71.7 | 22.5 | 83 | 0 | 0 | 17.2 | |
| 2 | 69.1 | 23.1 | 83 | 0 | 0 | 17.2 | |||
| 3 | 68.0 | 23.8 | 66 | 0 | 0 | 17.7 | |||
| TVI | High | 1 | 64.5 | 24.5 | 74 | 0 | 0 | 17.5 | |
| 2 | 62.1 | 24.6 | 83 | 0 | 0 | 17.0 | |||
| 3 | 59.0 | 26.4 | 70 | 0 | 0 | 17.9 | |||
| Iris 2 | ATR | Low | 1 | 41.1 | 30.6 | 46 | 1 | 0 | 15.9 |
| 2 | 36.0 | 31.2 | 103 | 1 | 1 | 14.3 | |||
| 3 | 33.9 | 31.5 | 115 | 3 | 3 | 13.6 |
| Sprayer Type | Air Flow Rate (m3·h−1) | Nozzle Type | Correlation Coefficient (r) | ||
|---|---|---|---|---|---|
| Rep 1 | Rep 2 | Rep 3 | |||
| Conventional | 34,959 | Conventional | 0.87 | 0.60 | 0.91 |
| Air injection | 0.88 | 0.32 | 0.40 | ||
| Conventional | 27,507 | Conventional | 0.85 | 0.91 | 0.94 |
| Air injection | 0.07 | 0.73 | 0.88 | ||
| Multi row | 6,423 | Conventional | 0.93 | 0.91 | 0.98 |
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gil, E.; Llorens, J.; Llop, J.; Fàbregas, X.; Gallart, M. Use of a Terrestrial LIDAR Sensor for Drift Detection in Vineyard Spraying. Sensors 2013, 13, 516-534. https://doi.org/10.3390/s130100516
Gil E, Llorens J, Llop J, Fàbregas X, Gallart M. Use of a Terrestrial LIDAR Sensor for Drift Detection in Vineyard Spraying. Sensors. 2013; 13(1):516-534. https://doi.org/10.3390/s130100516
Chicago/Turabian StyleGil, Emilio, Jordi Llorens, Jordi Llop, Xavier Fàbregas, and Montserrat Gallart. 2013. "Use of a Terrestrial LIDAR Sensor for Drift Detection in Vineyard Spraying" Sensors 13, no. 1: 516-534. https://doi.org/10.3390/s130100516