2.1. Reflectance at the Water Surface
The radiative transfer model Ecolight [
8] was used to synthetically generate remote sensing reflectances (R
rs) at the water surface. Ecolight is a fast version of Hydrolight [
9,
10]. It generates radiometric quantities by solving the azimuthally averaged radiative transfer equation, which is suitable for the purpose of this study as we are interested only in the water-leaving R
rs in the nadir-viewing direction, whereas Hydrolight solves the complete radiative transfer equation and generates radiance distribution as a function of depth below water and polar and azimuthal angles, which is computationally intensive. R
rs spectra were generated for a wide range of concentrations of chl-
a, CDOM, and SPM, typically encountered in coastal waters. Only low-to-moderate concentrations of SPM were considered because the atmospheric correction program used in this study assumes zero water-leaving radiance in the near-infrared (NIR) wavelengths used for retrieving aerosol parameters. Fourteen different levels of chl-
a concentration, seven levels of CDOM concentration, and five levels of SPM concentration were used (
Table 1), leading to 490 combinations of constituent concentrations, for each of which an R
rs spectrum was generated using Ecolight. The absorption coefficient of CDOM at 440 nm (
aCDOM(440)) was used as a measure of the CDOM concentration. The water was assumed to be optically deep to avoid interferences from a reflective bottom, which could affect the retrievals. All other relevant parameters, such as the sediment type, phase function of chl-
a and sediment particles,
etc., were kept the same for all 490 R
rs spectra generated through Ecolight simulations. The R
rs spectra were generated at the wavelength locations and spectral resolution of HICO, which collects data in the 350–1080 nm range at a 5.7 nm spectral resolution [
11]. Only data within the 400–725 nm range were used for retrieving water quality parameters.
Table 1.
Concentrations of chl-a and SPM, and absorption coefficient of CDOM at 440 nm, for which reflectance spectra were generated using Ecolight.
Table 1.
Concentrations of chl-a and SPM, and absorption coefficient of CDOM at 440 nm, for which reflectance spectra were generated using Ecolight.
| Chl-a (mg m−3) | SPM (g m−3) | aCDOM(440) (m−1) |
|---|
| 1, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80 | 1, 2, 4, 6, 8 | 0.1, 0.5, 1, 1.5, 2, 5, 10 |
2.2. Propagation to Top-of-Atmosphere (TOA) Radiance
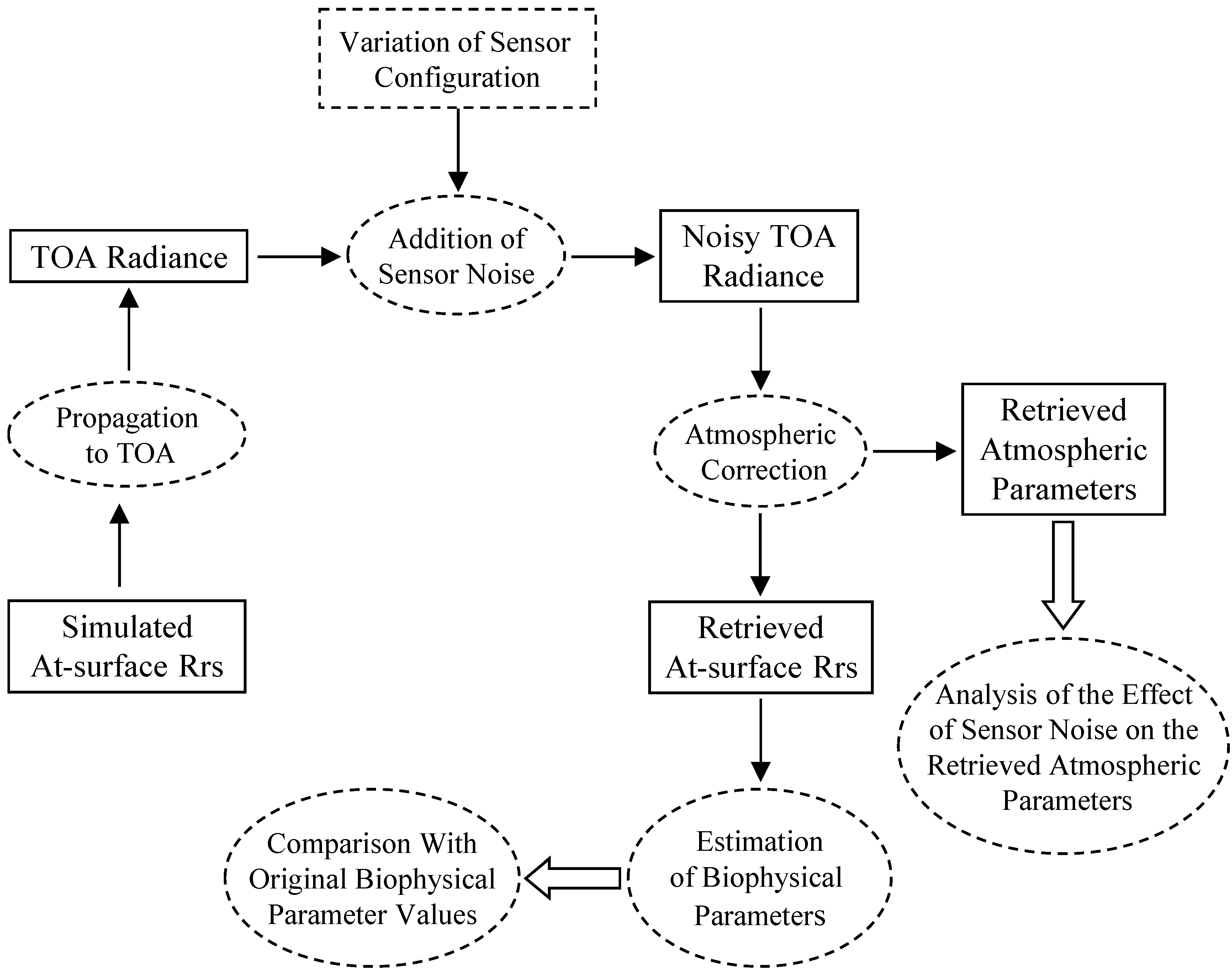
The at-surface reflectance data were processed in the sequence shown in
Figure 1. The at-surface reflectances were propagated through the atmosphere using the radiative transfer model Tafkaa [
12,
13] to estimate the TOA (Top Of Atmosphere) radiance at the sensor. Solar illumination and viewing conditions at the sensor, as specified by the date and time of data acquisition, the geographic location of the target, the ground elevation, the sensor altitude, and the viewing angles of the sensor in the zenith and azimuth directions, were kept the same for all 490 at-surface R
rs spectra. The location of the target and the date/time used in the simulation resulted in a solar zenith angle of 37 degrees. Atmospheric parameters, such as the atmospheric model, the types of atmospheric gases, the ozone amount, the column water vapor amount, the relative humidity, the aerosol model, the aerosol optical depth at 550 nm, and the wind speed, were also kept the same (
Table 2).
Figure 1.
Flow chart of the data processing steps (TOA: top of atmosphere).
Figure 1.
Flow chart of the data processing steps (TOA: top of atmosphere).
Table 2.
Geographic, illumination, and atmospheric parameter values used for the upward propagation of the at-surface reflectances.
Table 2.
Geographic, illumination, and atmospheric parameter values used for the upward propagation of the at-surface reflectances.
| Parameter | Value |
|---|
| Date | 9 April 2011 |
| Time | 15:30:00 (GMT) |
| Latitude | 37°30′ |
| Longitude | −76°10′ |
| Ground Elevation | 0 km |
| Sensor Altitude | 400 km |
| Sensor Zenith Angle | 0° |
| Sensor Azimuth Angle | 0° |
| Atmospheric Model | Mid-Latitude Summer |
| Atmospheric Gases | H2O, CO2, O2, N2O, CO, CH4, O3 |
| Ozone Amount | 0.34 atm-cm |
| Column Water Vapor | 2.50 cm |
| Relative Humidity | 50% |
| Aerosol Model | Maritime |
| Aerosol Optical Depth at 550 nm | 0.225581 |
| Wind Speed | 2 m s−1 |
2.3. Addition of Sensor Noise
Each of the 490 TOA radiance spectra was replicated to generate a 1000-pixel image to which noise was added (see also [
7]), resulting in 490 noisy images.
2.3.1. Considerations for the Sensor Configuration
Damm
et al. [
14] studied the effects of SNR, spectral resolution, spectral sampling interval, and spectral shift on the accuracy of the retrieved chl-
a fluorescence in plants, and concluded that among these four factors the SNR had the greatest effect on the accuracy of the retrieved chl-
a fluorescence. The configuration of a sensor determines the maximum achievable SNR. While it is desirable to design sensors that yield the highest possible SNR, the final design of a spaceborne sensor is a trade-off amongst various factors, such as the instrument cost, performance requirements (including spectral and spatial resolutions, spectral sampling interval, and dynamic range), and payload constraints.
HICO currently acquires data at a 96-m spatial resolution [
11]. Considering the continual push for sensors with higher spatial resolution for detailed coastal studies, it was decided to simulate HICO data at a 30-m spatial resolution for this study. Several hyperspectral sensors scheduled to be launched in the near future, such as HISUI (Hyperspectral Imager Suite), EnMAP (Environmental Mapping and Analysis Program), and PRISMA (PRecursore IperSpettrale della Missione Applicativa—
i.e., Hyperspectral Precursor of the Application Mission), are designed to have a spatial resolution of 30 m. For the data simulation purposes in this study, the change in spatial resolution was implemented by keeping the detector pixel size at its current value of 16 μm and increasing the focal length of the lens from 67 to 213.3 mm. HICO has an Offner spectrometer with an F-number of 3.5 [11]. The aperture diameter
was therefore set at 0.061 m.
While there are various ways to modify the sensor configuration and get the desired improvement in SNR, one of the most obvious and straightforward ways is by enlarging the diameter of the aperture, which increases the number of photons incident on the focal plane and improves the SNR across all spectral channels. In this study, we have investigated the improvement in the water quality parameter retrieval as the aperture size is increased to achieve an F-number of 1.0, which is currently the approximate limit of optical spectrometer design and fabrication capability. The Dyson spectrometer [
15,
16] design allows for an optically fast system with an F-number as small as 1.0. The Portable Remote Imaging Spectrometer (PRISM), built by the Jet Propulsion Laboratory [
17], has a Dyson spectrometer with an F-number of 1.8, operating in the 350–1050 nm range, and has been successfully deployed to collect high quality airborne data [
18]. In spite of the engineering challenges involved, it is not unreasonable to anticipate the fabrication of a high-fidelity f/1.0 system in the near future.
We do not suggest that using a high-throughput, optically fast spectrometer is the only or the most preferred way of obtaining a high SNR. As alluded to earlier, there are other ways of achieving a higher SNR for the same spatial and spectral resolutions, each of which place different requirements on the sensor design. For e.g., the SNR can be increased through increasing the exposure time by nodding the sensor over the target of interest (through forward motion compensation) as the satellite moves along its orbit. The SNR can also be increased by using larger detector pixels, which would result in an increase in the number of photons captured. This approach would require a longer focal length and, therefore, a larger aperture to maintain the F-number. Nevertheless, there are tradeoffs involved in each of these options. Nodding the sensor reduces the spatial extent of the area that can be captured by the sensor in one orbit. It is not suited for sensors designed to acquire data continuously but for sensors designed to acquire data in an on-demand basis in which high-priority targets are pre-selected and the sensor is programmed to nod when passing over those targets. Moreover, when the sensor nods over a target, the atmospheric path of light from the target to the sensor changes as the satellite moves along. This can cause significant uncertainties in the atmospheric correction, especially in coastal regions adjoining urban areas where the atmospheric aerosol composition may vary significantly over short spatial scales. Using large detector pixels will increase the size and weight of the payload, which can make the mission too expensive and/or difficult to launch. Factors such as the allocated budget for the mission, the allocated payload space in the launch vehicle, the type of orbit, and the intended application of the data drive the decision on the particular option or a combination of options for obtaining optimal SNR.
In this study, we have opted to model the increase in SNR by decreasing the F-number. Keeping the focal length at 213.3 mm, the aperture diameter was increased to 0.2133 m to get an F-number of 1.0. We simulated data for a system with an F-number of 1.0 and compared the results to the results obtained from a HICO-like system with an F-number of 3.5. As there are a number of factors besides the F-number that affect SNR and an increase in SNR can be achieved by adjusting any of these factors, we prefer to cast this study as a comparison between a high-SNR and a low-SNR system rather than strictly as f/3.5 vs. f/1.0, while underscoring that in this study the modeled high-SNR was achieved by decreasing the F-number. Henceforth, the low-SNR system refers to a HICO-like f/3.5 system, whereas the high-SNR system refers to an f/1.0 system.
2.3.2. Sensor Noise Model
The noise was added to the signal as a normally distributed random variable with a mean of zero and a standard deviation equal to the expected noise level. The total sensor noise was calculated by adding in quadrature the shot noise, dark noise, readout noise, and digitization noise.
The shot noise is the square root of the total signal (electrons) generated by the photons incident on the detector. The total signal generated at the detector is given by [
19,
20],
where, λ is the wavelength of the incident radiation (in units of μm)
h is the Planck’s constant
c is the velocity of electromagnetic radiation (in units of m s−1)
is the incoming radiance at the sensor in the waveband Δλ (in units of Wm−2 Sr−1)
D is the diameter of the aperture (in units of m)
f is the focal length of the imaging system (in units of m)
p is the spatial width of the detector pixel (in units of m)
T is the exposure time (in units of s)
is the overall system efficiency, which is given by,
, where,
is the optical transmittance of the system
is the quantum efficiency of the detector
is the grating efficiency, which is given by,
, where,
is the grating efficiency at the blaze wavelength, ,
is the fraction of a grating groove that is at the blaze angle.
h (= 6.63 × 10
−34 Js) and
c (= 3 × 10
8 ms
−1) are constants. Nominal values for the relevant instrument-related quantities in Equation (3) were taken from the corresponding values for HICO. Lucke
et al. [
11] have provided a detailed description of the HICO instrument. For the high-SNR (
i.e., F-number = 1.0) system, the quantum efficiency of the commercially available FBX-2K256 CMOS array from Brandywine Photonics (Exton, PA, USA), which has the required electron well depth to remain unsaturated when used in an f/1.0 system over shallow coastal waters, was used in the noise calculation. The quantum efficiency of this detector was slightly higher than that of the HICO detector at wavelengths below 450 nm and above 750 nm and lower than that of the HICO detector at wavelengths between 450 nm and 750 nm.
The standard deviation of a dark image acquired by HICO was taken to represent the combination of dark noise, readout noise, and digitization noise for the low-SNR system. For the high-SNR system, the dark noise, readout noise, and digitization noise were obtained from the information sheet for the FBX-2K256 CMOS detector.
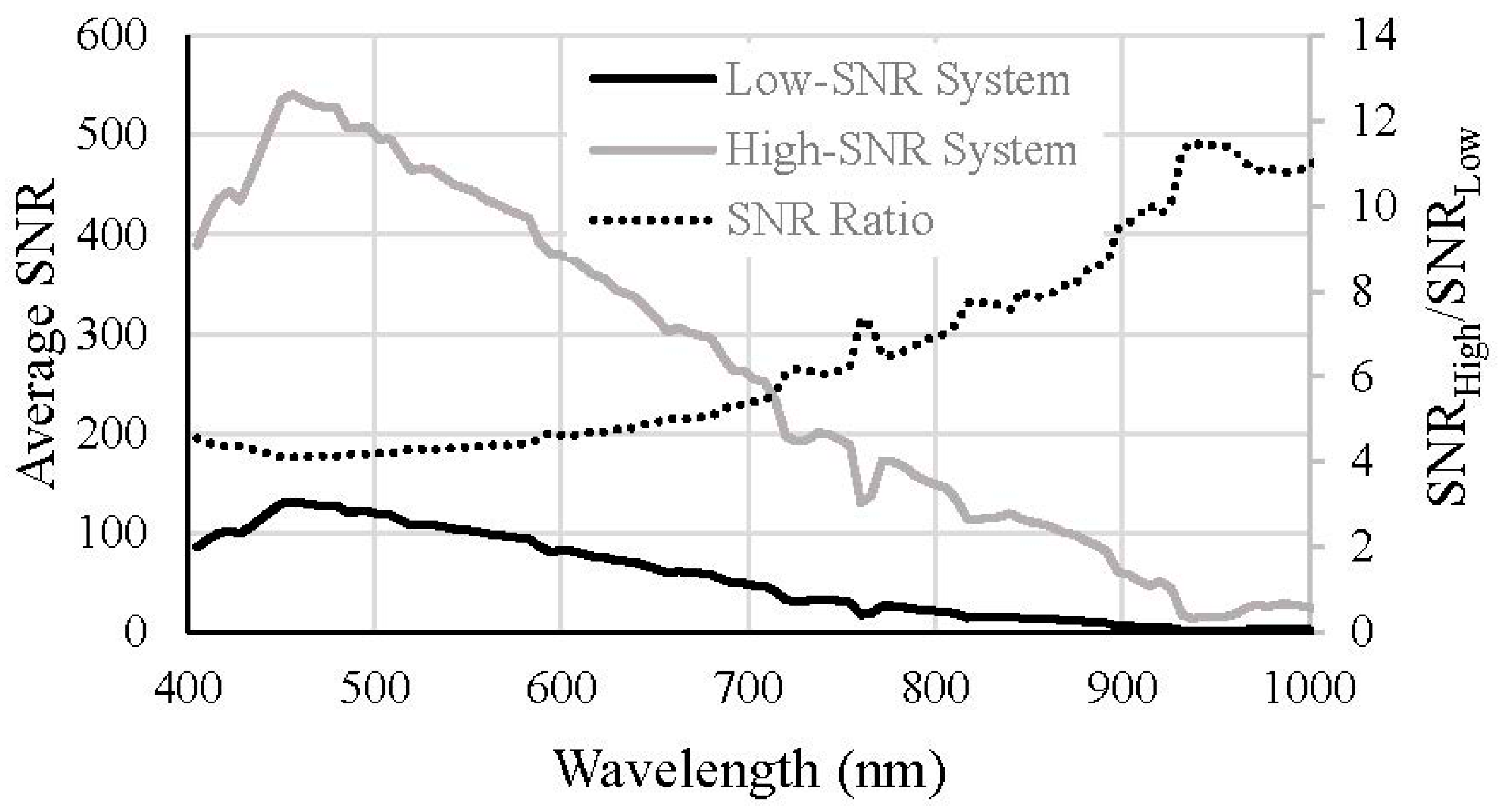
In changing the F-number from 3.5 to 1.0 while maintaining the focal length, the diameter of the aperture was increased by 3.5 times, resulting in a 12.25-fold increase in the area of the aperture. Thus, a system with F-number = 1.0 receives 12.25 times more photons than a system with F-number = 3.5, leading to a significant improvement in the SNR. This is illustrated in
Figure 2, which contains plots of the average SNR calculated from the at-sensor radiances for all 490 images for both systems. The average SNR for the high-SNR system (F-number = 1.0) is more than four times higher than the average SNR for the low-SNR system (F-number = 3.5) throughout the visible spectral range, where shot noise dominates, and up to 10–12 times higher in the NIR region, where the dark noise and read noise play a dominant role.
Figure 2.
The average SNR calculated from the at-sensor radiances (of all 490 images) for the low- and high-SNR systems. The ratio of the average SNR for the high-SNR system to that for the low-SNR system is plotted on the secondary axis.
Figure 2.
The average SNR calculated from the at-sensor radiances (of all 490 images) for the low- and high-SNR systems. The ratio of the average SNR for the high-SNR system to that for the low-SNR system is plotted on the secondary axis.
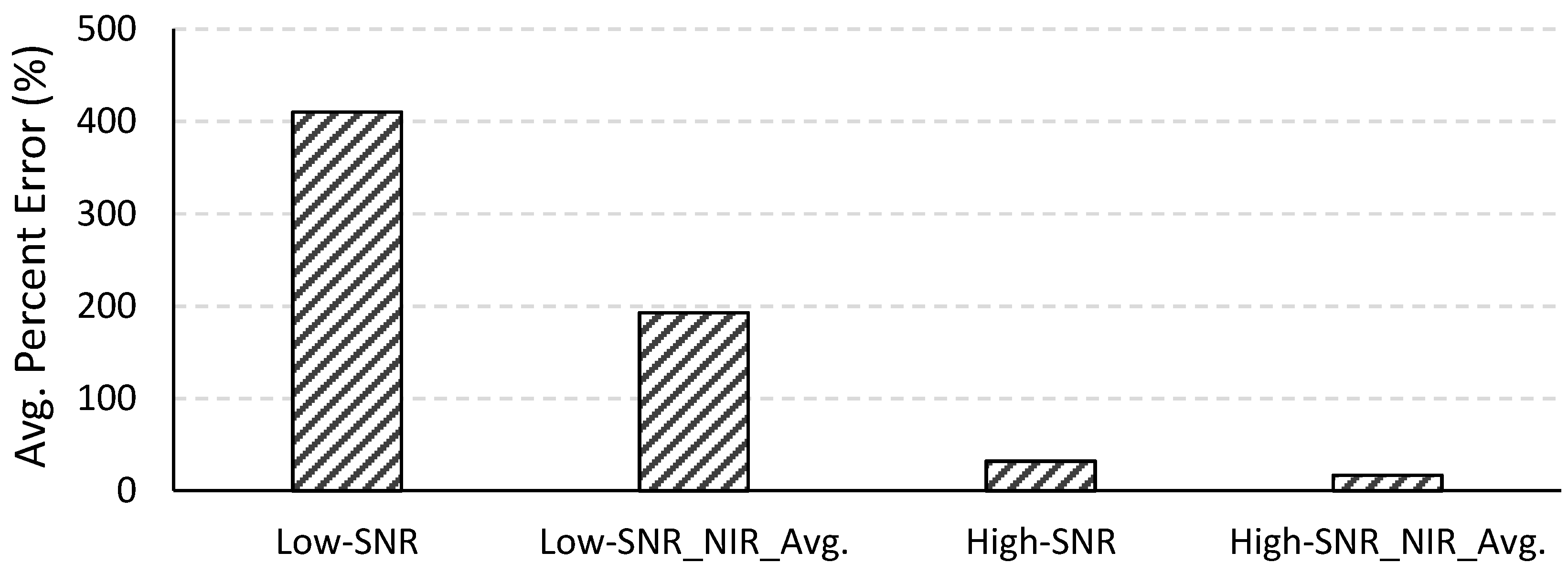
2.3.3. Improving Effective SNR through Post-Processing
In addition to making changes to the sensor configuration, the uncertainty in the atmospherically corrected data can be further reduced by post-processing methods. For instance, the noise in the NIR spectral bands used for atmospheric correction can be reduced by averaging the pixels in the spatial or spectral domains. Such averaging, when performed at reasonably moderate scales, will have negligible impact on data analysis because the reflectances at these spectral bands (beyond 750 nm) are often used primarily for atmospheric correction only and not for retrieving water quality parameters. However, spatial averaging is preferred over spectral averaging because spectral averaging, while increasing the SNR, will coarsen the spectral resolution at spectral bands that are used for the retrieval for atmospheric parameters; spatial averaging will not have a detrimental effect on the retrieval of atmospheric parameters if the atmosphere can be safely assumed to be constant over the area represented by the pixels that are averaged. For sensors with high spatial resolution, on the order of a few tens of meters, this is usually a safe assumption, except, perhaps, for waters very close to the coastline. In this study, spatial averaging in the NIR spectral bands was performed by replacing the at-sensor NIR radiance at each pixel with the average of the at-sensor NIR radiances in a 3 × 3 pixel area containing and surrounding the pixel. Considering the cost and complicated engineering effort involved in fabricating an f/1.0 system, it is pertinent to consider whether spatially averaging the data at the NIR spectral bands from an f/3.5 system would yield a comparable reduction in retrieval uncertainty to what would be obtained from an f/1.0 system.
2.4. Atmospheric Correction of Noisy TOA Radiance Images
Atmospheric correction is a necessary part of the processing of remotely sensed data, especially if quantitative information (used in conjunction with physical models) is to be retrieved. The simulated noisy at-sensor radiances were atmospherically corrected using Tafkaa to remove the atmospheric effects and retrieve the at-surface reflectances. Tafkaa was set to atmospherically correct the noisy at-sensor radiance images by automatically retrieving the atmospheric parameters from the noisy radiances. Tafkaa uses a look-up-table approach to estimate the atmospheric contribution to the at-sensor radiances. The radiance observed at the sensor is expressed as,
where
Lobs is the observed radiance at the sensor,
Latm+sfc is the combination of atmospheric path radiance, the radiance specularly reflected from the water surface, and the radiance from whitecaps that is transmitted through the atmosphere to the sensor,
Lw is the water-leaving radiance, and
tu is the upward transmittance of
Lw to the sensor. Converting the radiance quantities into reflectance quantities and taking into account the absorption and scattering processes in the ocean-atmosphere system along the sun-surface-sensor path, Equation (4) can be rewritten as (see [
13] for details),
where
is the observed at-sensor reflectance,
is the at-sensor reflectance due to the combination of atmospheric path radiance, specular reflection from the water surface, and reflection from whitecaps,
is the apparent water-leaving reflectance,
is the downward atmospheric transmittance of the solar irradiance,
s is the average reflectivity of the atmosphere for isotropic radiation upwardly incident at its base, and
Tg is total atmospheric gaseous transmittance in the sun-surface-sensor path. The term
accounts for the loss of photons due to the downward reflection of a part of the water-leaving radiance by the atmosphere back to the water surface. The effects of subsequent multiple reflections of photons between the water surface and the atmosphere are neglected. Rearranging terms,
Thus,
(from which R
rs is calculated by division by π) can be determined if the quantities on the right-hand-side (RHS) of Equation (6) are determined through measurements or theoretical modeling. Tafkaa uses pre-computed values (stored in a look-up-table) of the quantities on the RHS of Equation (6), calculated using a slightly modified version of the vector radiative transfer model developed by Ahmad and Fraser [
21] for a variety of solar illumination and sensor viewing geometries and five aerosol models (each at five levels of relative humidity and 10 levels of optical thickness). For illumination/viewing geometries and atmospheric conditions not explicitly contained in the look-up-table, Tafkaa interpolates using adjacent values to determine the radiometric quantities.
One of the goals of this study was to analyze the effect of sensor noise on atmospheric correction by comparing two retrieved atmospheric parameters, namely, the column water vapor amount and the aerosol optical thickness, with the original atmospheric parameters that were used to propagate the at-surface reflectances to TOA radiances. To that end, atmospheric correction was performed by setting the column water vapor amount, aerosol optical thickness, relative humidity, and aerosol model as variable parameters and fixing the rest of the parameters at the same values (
Table 2) that were used to propagate the original at-surface reflectances to TOA radiances. Radiances in the NIR spectral channels closest to 750 nm, 865 nm, and 1040 nm were used to retrieve the aerosol properties.
2.5. Estimation of Water Quality Parameters
Two approaches were used to estimate the water quality parameters from the atmospherically corrected data: (i) a non-linear least squares error minimization approach to estimate the concentrations of chl-a and SPM and aCDOM(440) simultaneously and (ii) a semi-analytical NIR-red algorithm to estimate chl-a concentration.
(i) Non-Linear Least Squares Error Minimization Approach:
The concentrations of chl-
a and SPM and
aCDOM(440) were estimated from the atmospherically corrected noisy at-surface reflectances by using the Levenberg-Marquardt method [
22,
23], which is a non-linear least squares curve fitting procedure that estimates parameters by minimizing the squared difference between measured data and modeled data. In this case, the estimated parameters were the concentrations of chl-
a and SPM and
aCDOM(440); the atmospherically corrected noisy at-surface reflectances were treated as the measured data; and the modeled data were obtained from fresh runs of the radiative transfer model Ecolight for a given set of parameters. The parameter estimation was done through MPFIT [
24], which is an enhancement of the FORTRAN-based software MINPACK [
25,
26], and is written for use with IDL (Interactive Data Language). For a given noisy spectrum, MPFIT takes in an initial set of parameter values, which were set equal to the corresponding original constituent concentrations (
Table 1), and through an iterative process estimates the optimal concentrations of chl-
a and SPM and
aCDOM(440) by minimizing the squared difference between the noisy R
rs spectrum and the R
rs spectrum generated by Ecolight for a given set of parameters.
The numerical approach for estimating the water quality parameters was computationally intensive and time consuming, and was therefore not applied to all 490 images. Instead, 20 images encompassing ranges of constituent concentrations (
Table 3) typically encountered in coastal waters were selected and used for this analysis. These 20 images constitute a representative sample that spans the entire range of chl-
a and SPM concentrations encompassed by the 490 images. Very high
aCDOM(440) values were omitted from this subset because the spectral overlap of the absorption features of chl-
a and CDOM in the blue spectral region introduces additional retrieval errors in algorithms that use reflectances in the blue region. The omission of very high
aCDOM(440) values was considered acceptable because this study is not a test of the robustness of the algorithm but rather its sensitivity to uncertainties caused by sensor noise, which meant that the uncertainties due to inherent errors in the bio-optical algorithm had to be kept at a minimum so that the uncertainties observed in the retrievals can be confidently attributed largely to the effects of sensor noise.
Table 3.
Constituent concentrations considered for the analysis of the effect of sensor noise on the water quality parameters retrieved through the non-linear least squares error minimization approach.
Table 3.
Constituent concentrations considered for the analysis of the effect of sensor noise on the water quality parameters retrieved through the non-linear least squares error minimization approach.
| S. No. | Chl-a (mg m−3) | aCDOM(440) (m−1) | SPM (g m−3) |
|---|
| 1 | 1 | 0.1 | 1 |
| 2 | 5 | 0.1 | 2 |
| 3 | 5 | 0.5 | 1 |
| 4 | 10 | 0.1 | 4 |
| 5 | 10 | 1 | 6 |
| 6 | 15 | 0.5 | 4 |
| 7 | 20 | 0.1 | 2 |
| 8 | 20 | 0.5 | 4 |
| 9 | 25 | 2 | 8 |
| 10 | 30 | 0.1 | 2 |
| 11 | 30 | 1 | 6 |
| 12 | 35 | 1.5 | 8 |
| 13 | 40 | 1 | 2 |
| 14 | 45 | 1.5 | 4 |
| 15 | 50 | 1 | 8 |
| 16 | 50 | 2 | 4 |
| 17 | 60 | 1.5 | 8 |
| 18 | 70 | 1.5 | 4 |
| 19 | 70 | 0.5 | 6 |
| 20 | 80 | 2 | 8 |
(ii) Semi-Analytical NIR-red Algorithm:
The chl-
a concentration was also estimated using the semi-analytical two-band NIR-red model [
27].
where R
NIR and R
red are reflectances in the NIR and red regions, respectively. The two-band NIR-red model has been previously shown to yield accurate estimates of chl-
a concentration (e.g., [
28]) when applied to data from MERIS, which has spectral channels centered at 665 nm (red) and 708 nm (NIR). Because HICO does not have a spectral channel centered at 665 nm, the average of the reflectances at 662 nm and 668 nm were used instead.
The simulated dataset contained a wide range of
aCDOM(440) values at seven discrete levels for each combination of chl-
a and SPM concentrations. This meant that for a given pair of chl-
a and SPM concentrations, there were seven different reflectance spectra, each varying based on the
aCDOM(440) value, resulting in seven different values for the two-band NIR-red algorithm, which made it not possible to derive a single robust regression relationship between the two-band NIR-red ratio and chl-
a concentration for the whole dataset. Therefore, the two-band model was parameterized separately (
Table 4) at each level of
aCDOM(440) instead of using a single regression model for the entire dataset. This is acceptable because the goal here is not to develop a universally applicable chl-
a algorithm but to simply test the sensitivity of the two-band NIR-red model to uncertainties arising from the sensor noise. The regression equations (
Table 4) were applied to the original, noiseless R
rs spectra at each
aCDOM(440) level to estimate the noiseless, “true” chl-
a concentration according to the two-band NIR-red algorithm. The same equations were also applied to atmospherically corrected, noisy reflectance data, to estimate the “noisy” chl-
a concentrations, which were compared with the “true” chl-
a concentrations to assess the impact of sensor noise on the estimated chl-
a concentration.
Table 4.
Coefficients of the second order polynomial regression , where , at various levels of aCDOM(440).
Table 4.
Coefficients of the second order polynomial regression , where , at various levels of aCDOM(440).
| aCDOM(440) (m−1) | A | B | C |
|---|
| 0.1 | 264.16 | −200.21 | 34.499 |
| 0.5 | 271.61 | −215.54 | 39.562 |
| 1 | 279.74 | −232.86 | 45.419 |
| 1.5 | 286.88 | −248.64 | 50.882 |
| 2 | 294.82 | −265.68 | 56.956 |
| 5 | 341.05 | −367.56 | 96.38 |
| 10 | 429.34 | −567.56 | 186.18 |
2.6. Measures of Uncertainty
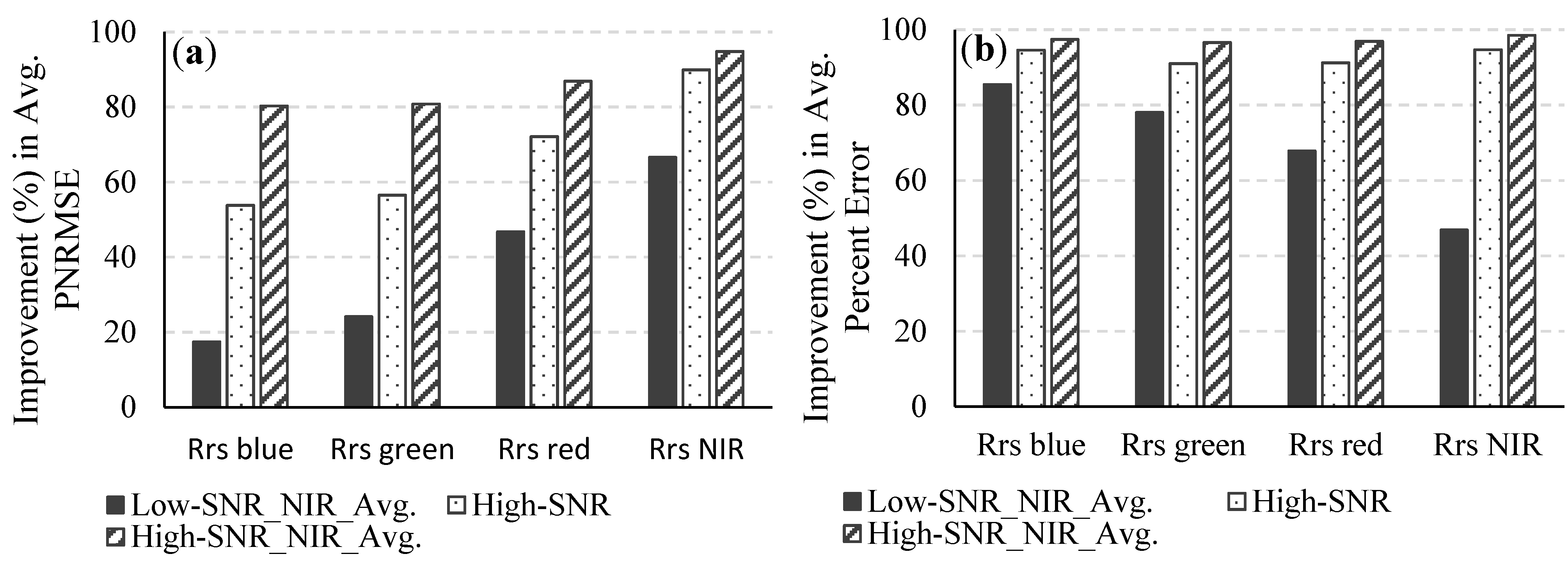
Uncertainty in the results due to the effects of sensor noise was estimated using two error estimates, namely, the average Percent Normalized Root Mean Square Error (PNRMSE) and the average percent error in each parameter retrieved. The average PNRMSE is an estimate of the average variation of the retrieved values from the true value within each image and is, therefore, a measure of the spread of the noise-induced uncertainties in the retrievals within each 1000-pixel noisy image. The average percent error is an estimate of the average departure of the mean retrieved value (the mean calculated from the 1000 pixels of each image) from the true value. The average percent error could reveal any systematic deviation of the mean retrievals from the true values.
The average PNRMSE for each parameter of interest was calculated from the 490 noisy images as follows:
where,
X is the parameter of interest,
is the parameter value for the
nth pixel in the
jth noisy atmospherically corrected 1000-pixel image, and
is the parameter value for the original reflectance spectrum used to generate the
jth image. The average percent error for each parameter of interest was calculated as follows:
where,
is the average parameter value retrieved from the 1000 pixels of the
ith atmospherically corrected noisy 1000-pixel image and
is the corresponding original parameter value that was used to produce the R
rs spectrum from which the noisy image was generated.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









