
An Approach to Biometric Verification Based on Human Body Communication in Wearable Devices



Abstract
:1. Introduction
2. Modeling Biometric Verification Based on HBC
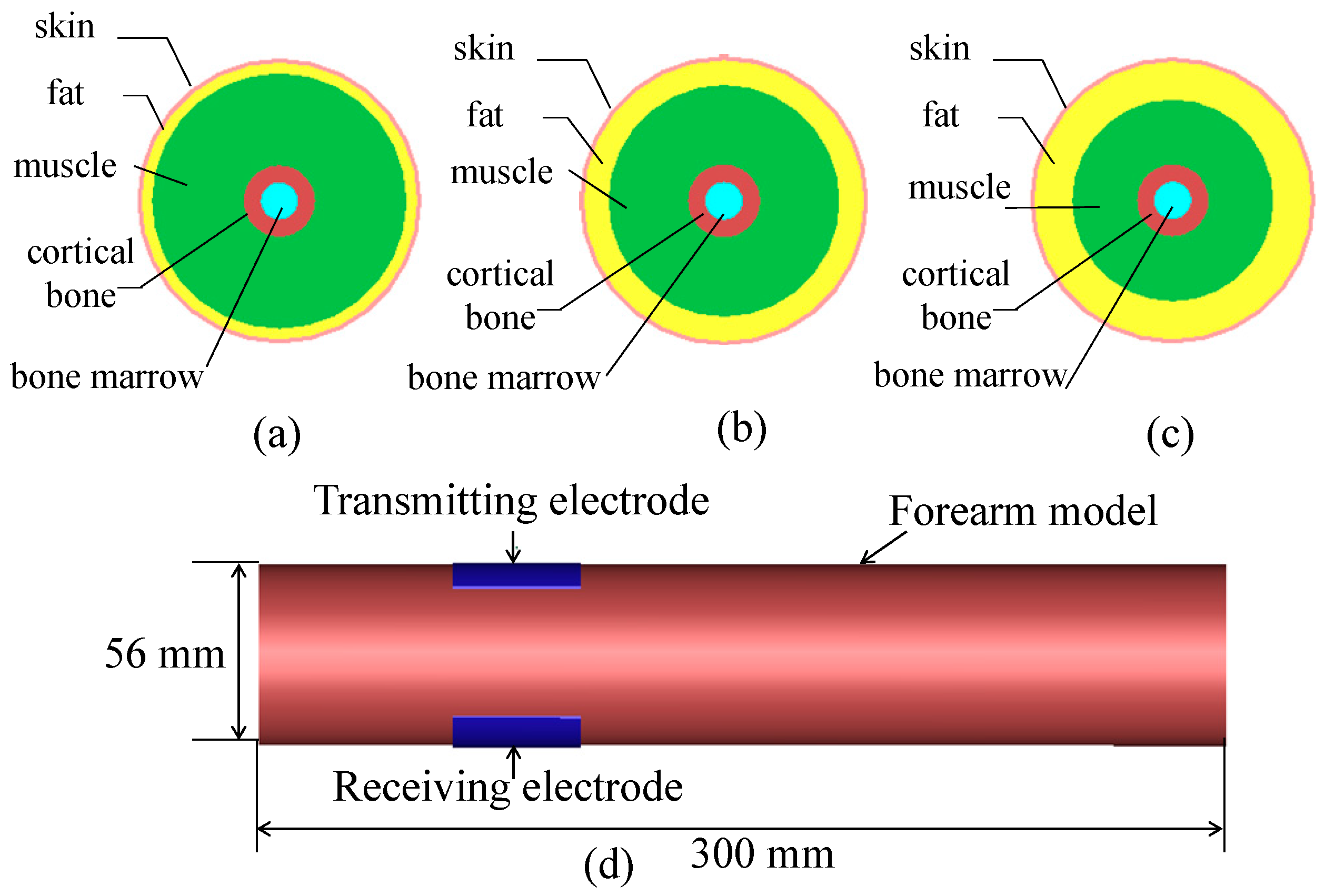
2.1. Forearm Modeling
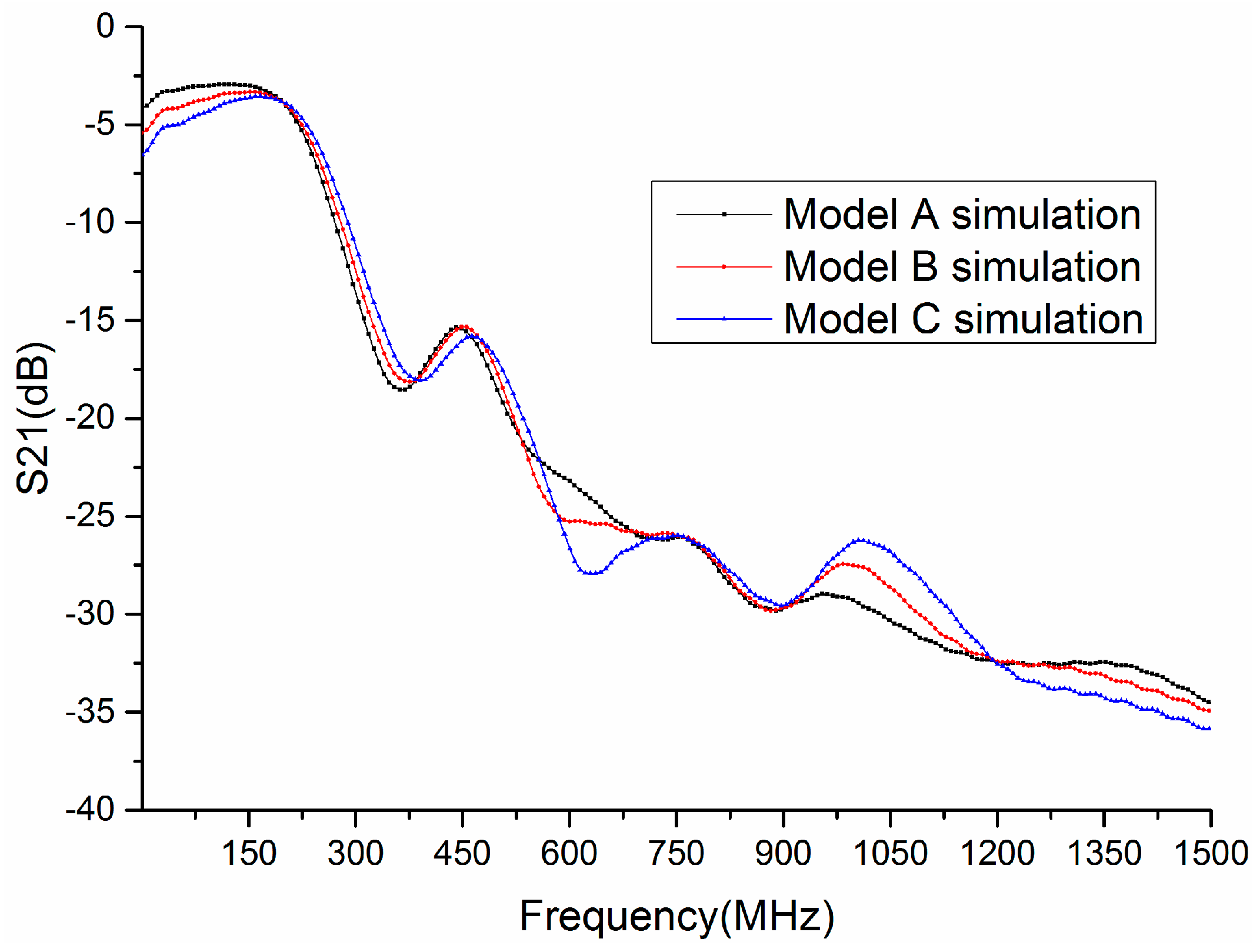
2.2. Simulation Result
3. Experimental Setup
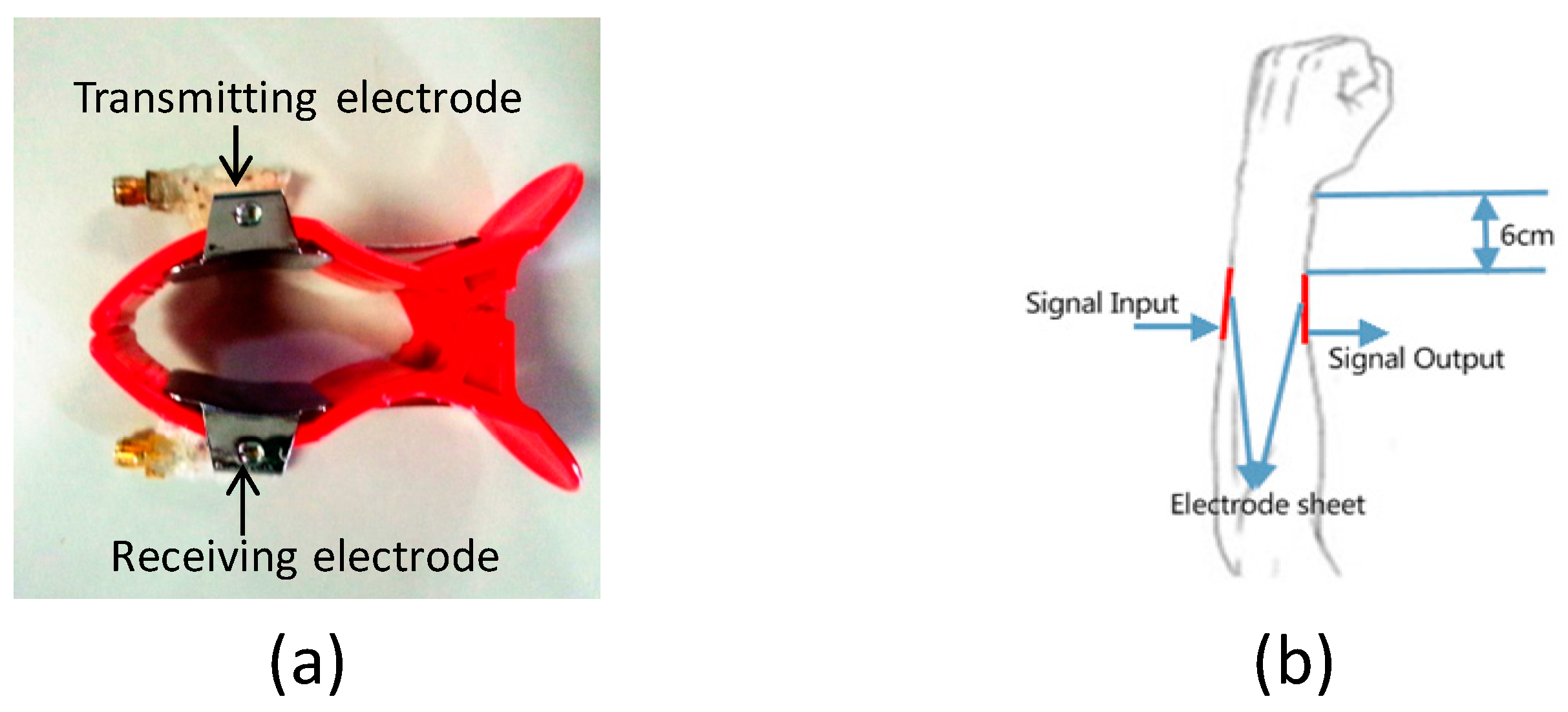
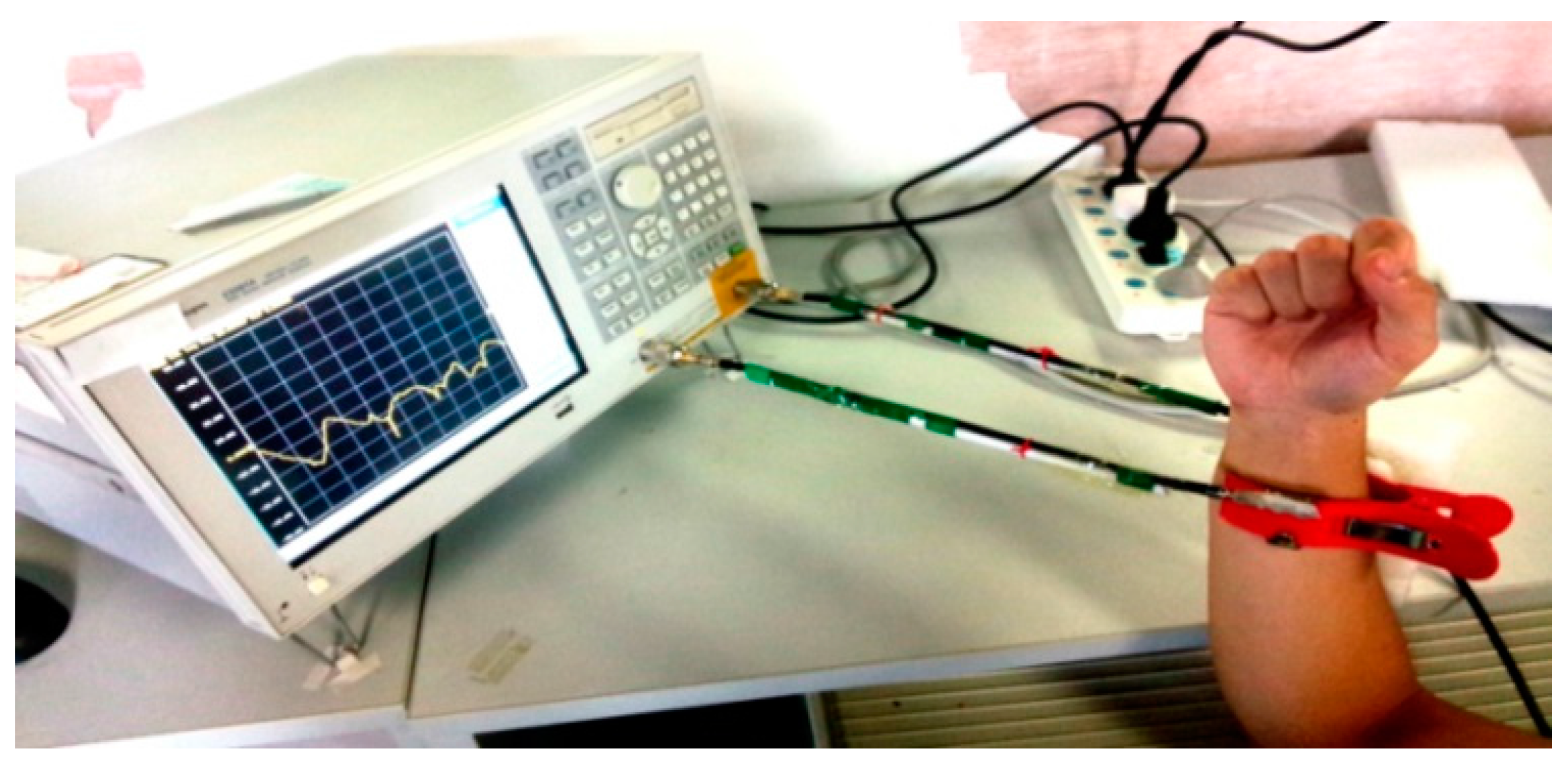
3.1. Experimental Equipment
3.2. Experimental Setup
4. Measurement Results and Analysis
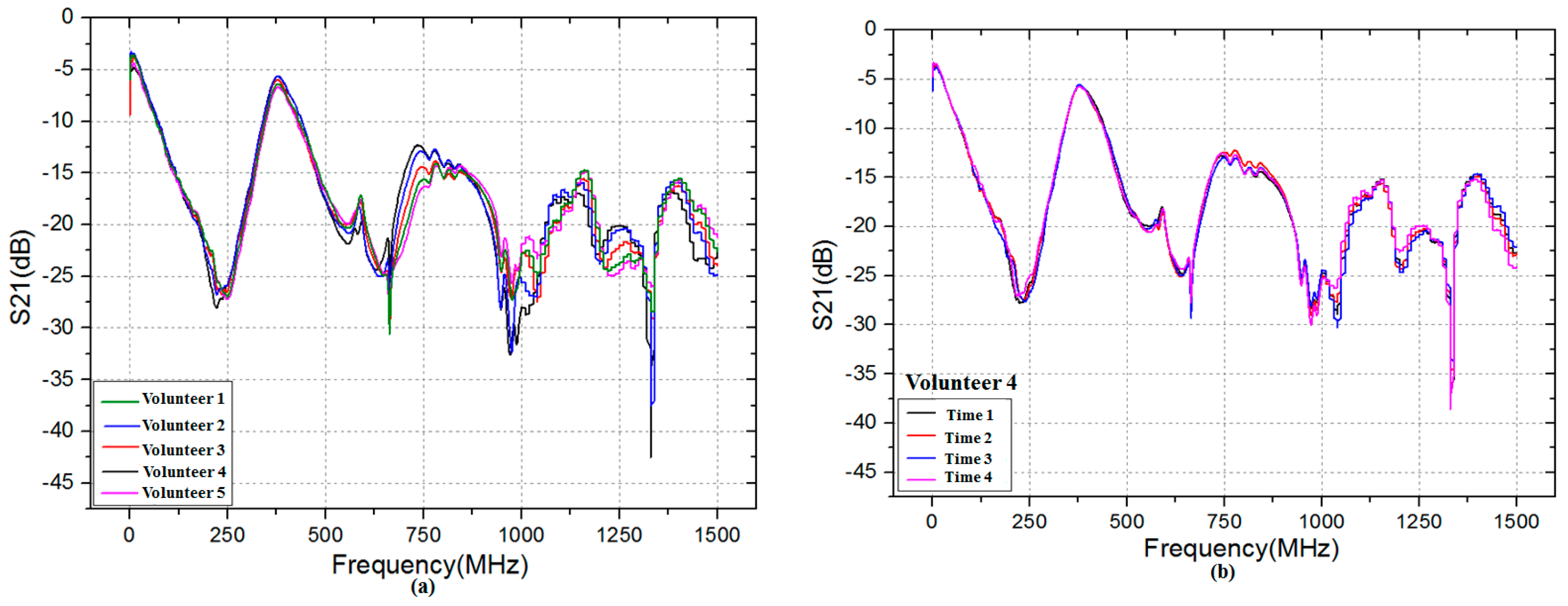
4.1. Feasibility of Biometric Verification Based on HBC
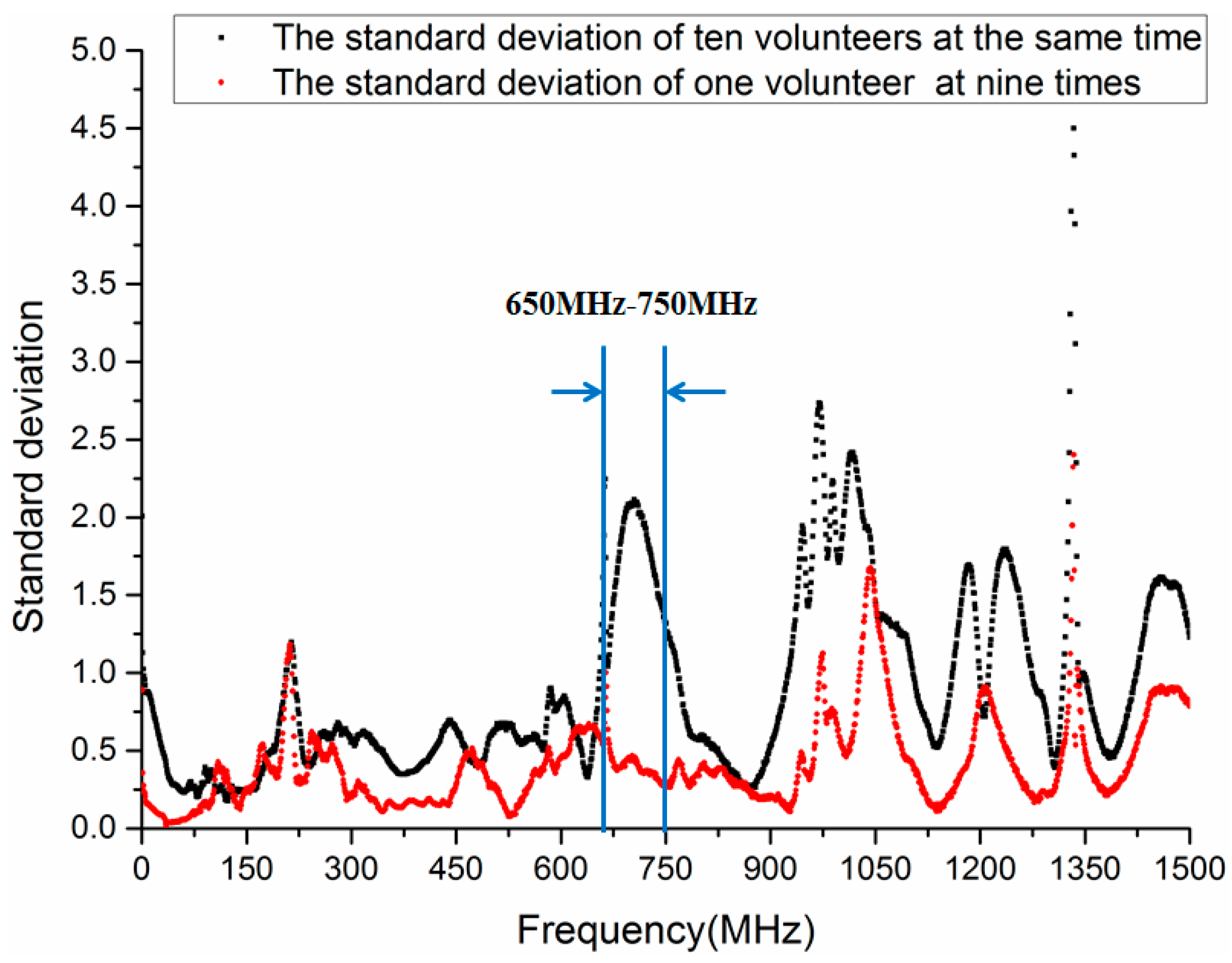
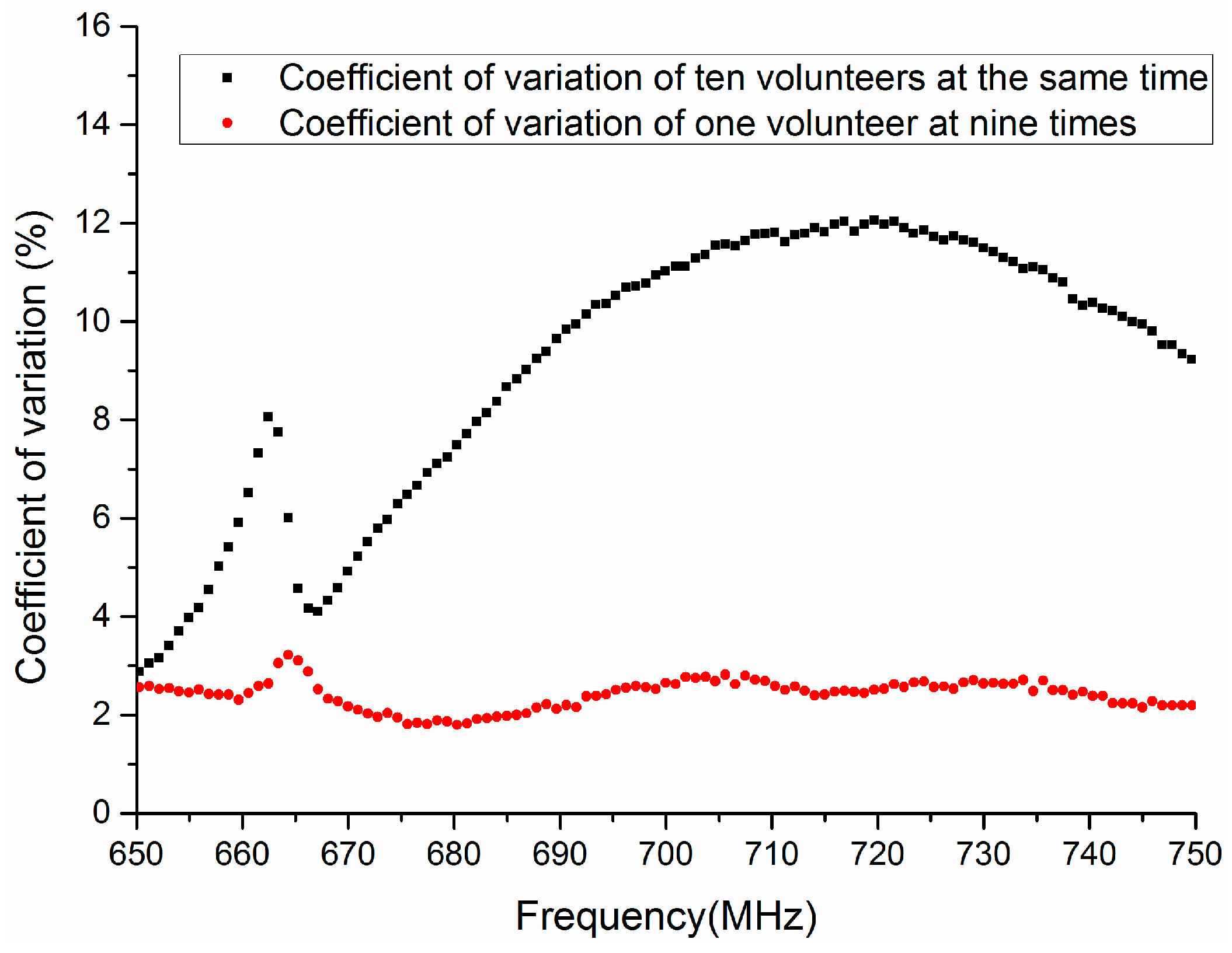
4.2. Chosen Frequency for Biometric Verification
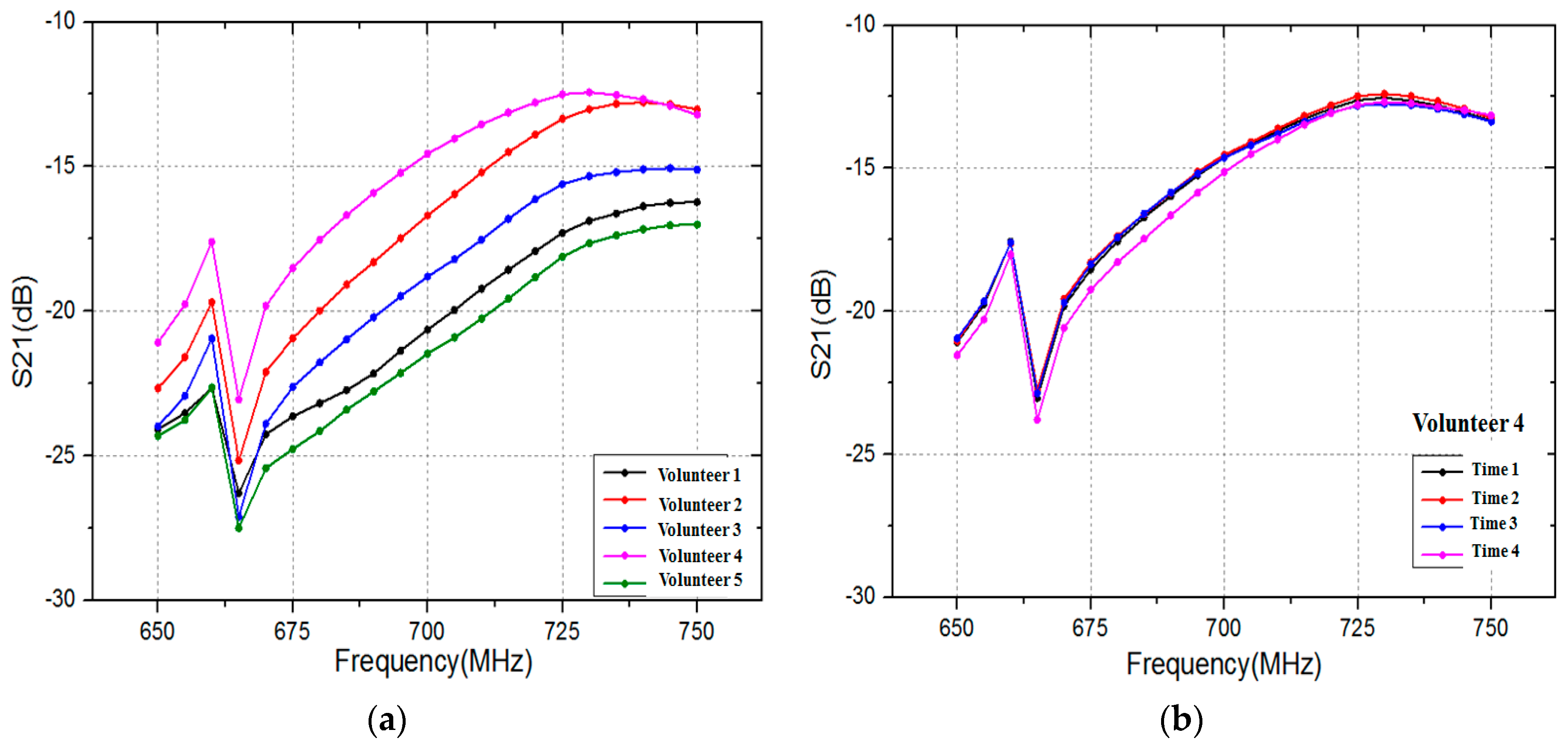
4.3. Transmission Gain S21 at Chosen Frequency
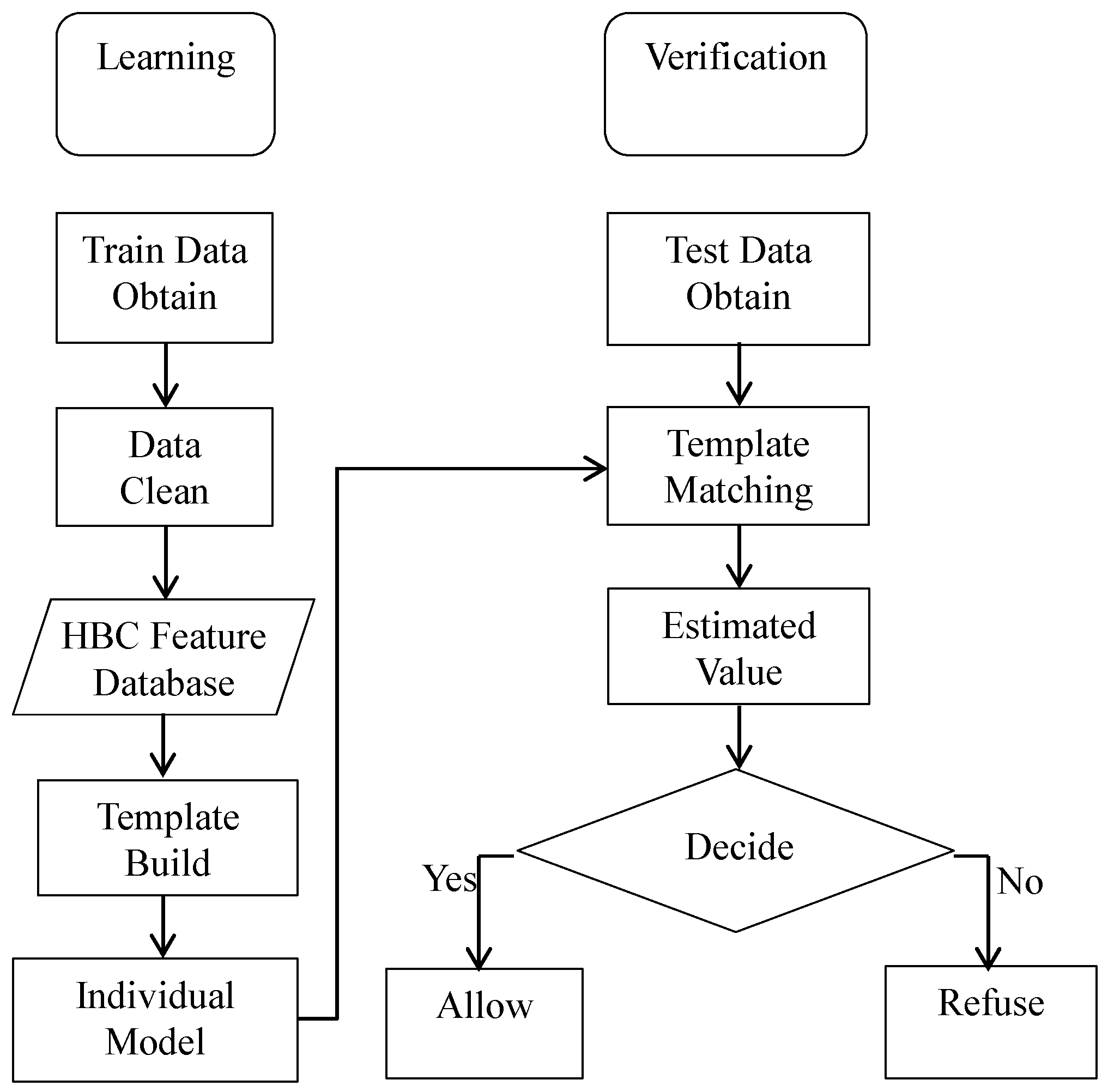
5. TATM Algorithm Proposed
5.1. Template Building
5.2. Verification
6. Algorithm Evaluation
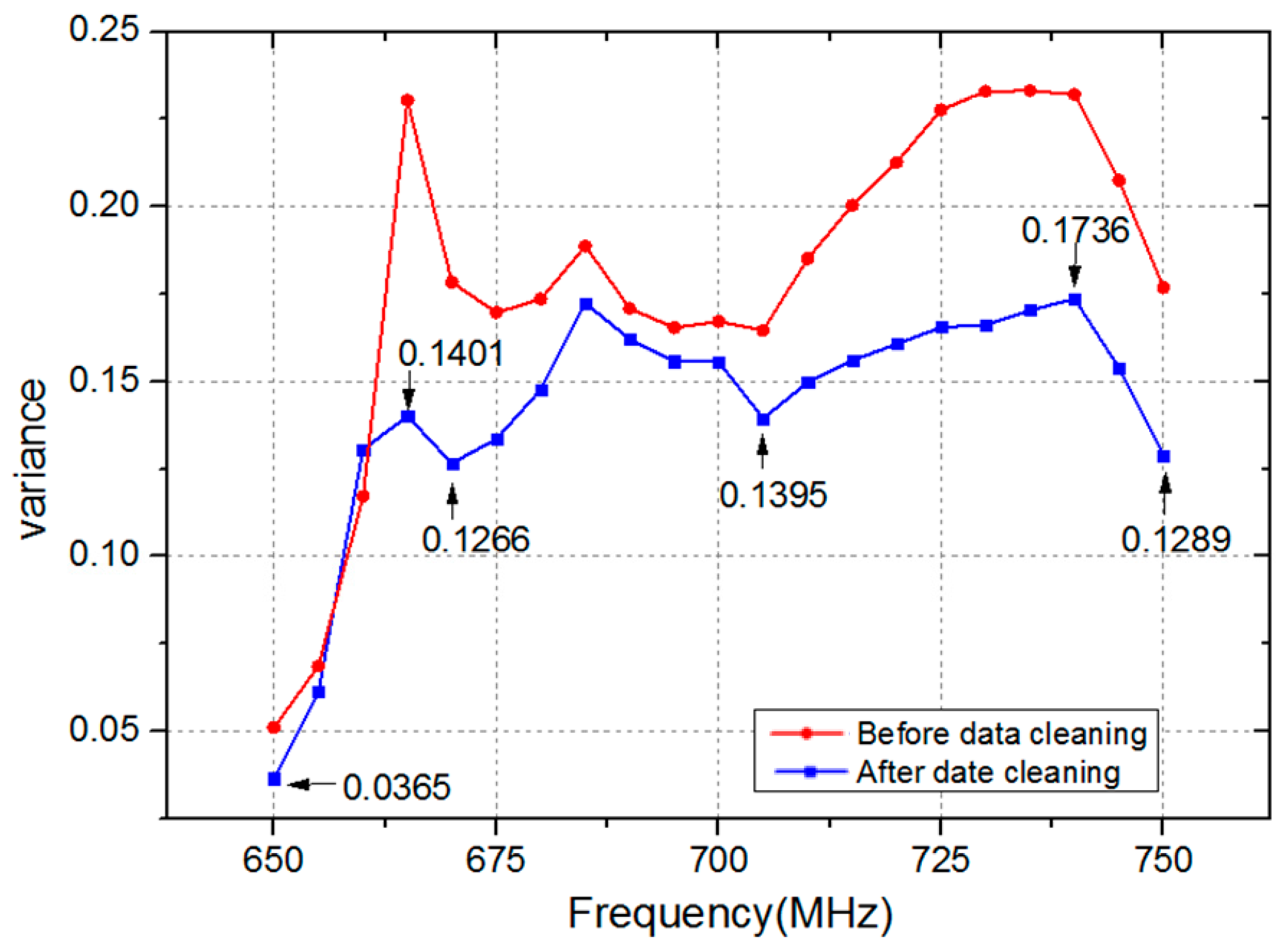
6.1. Effect of Data Cleaning
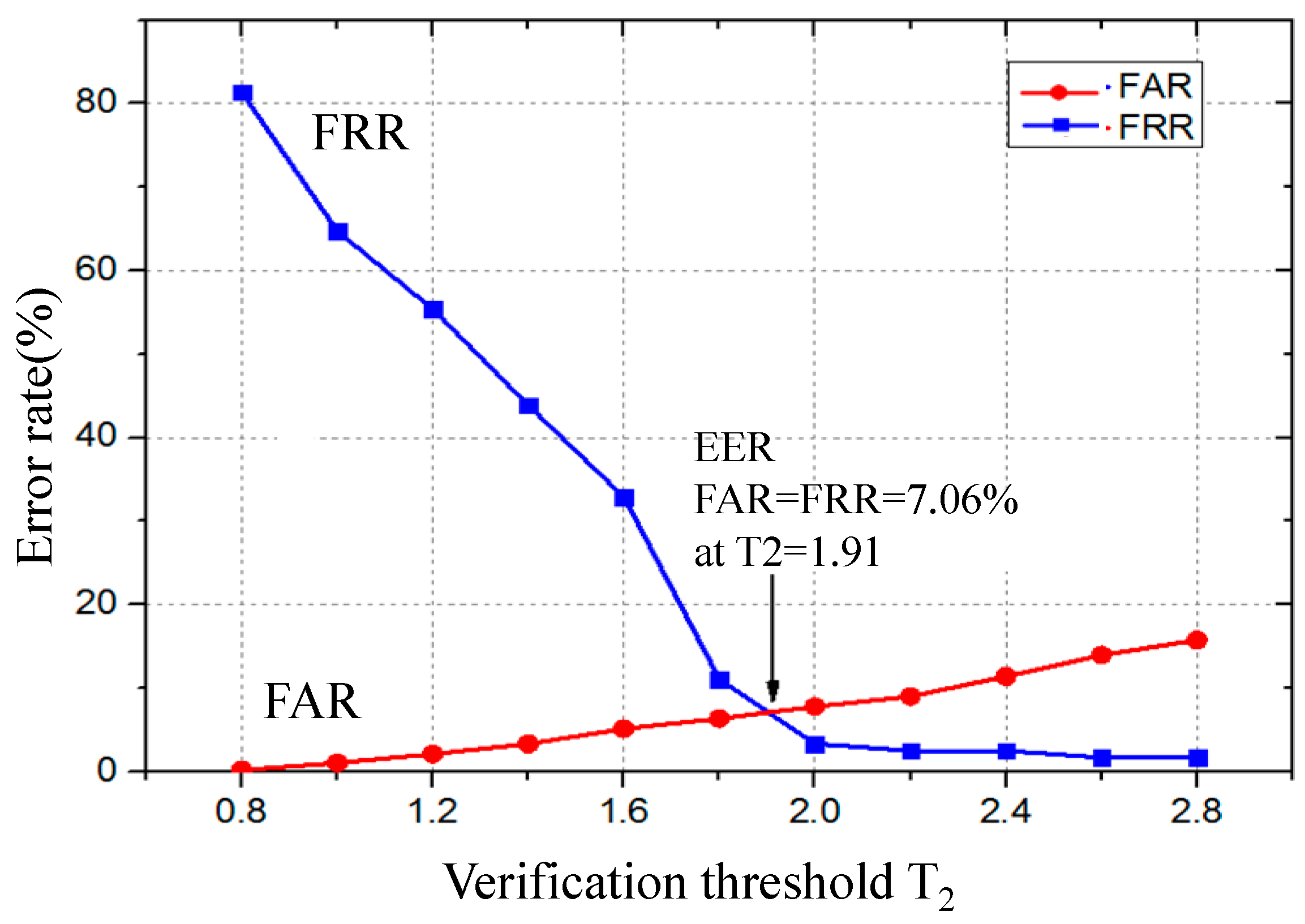
6.2. The EER
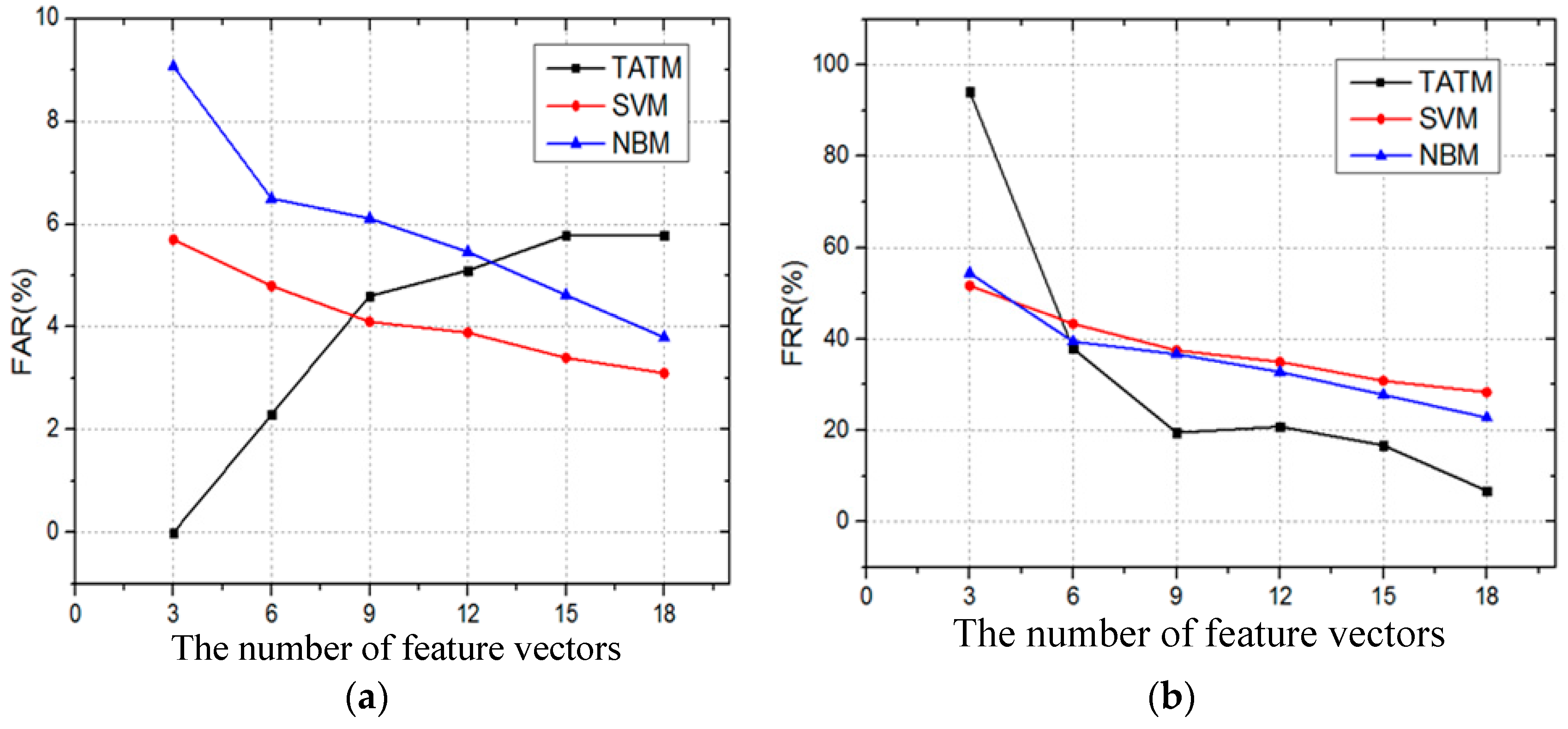
6.3. Algorithm Comparison
6.4. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
A.1. KNN
- (1)
- The dataset X and the number of clustering N (N > 1) are set at initialization time. N objects are randomly selected as the initial cluster centers in dataset X.
- (2)
- The Euclidean distance between each object and the cluster centers is calculated. According to the principle of minimum distance, datasets will be divided into N classes again.
- (3)
- The average value of each class is used as a new clustering center.
- (4)
- If the new clustering center is equal to the cluster center, the iterative process stops; otherwise, repeat Step 2 and Step 3.
A.2. NBM
- (1)
- and are set as a sorting item and collection of categories, respectively. C is trained in advance.
- (2)
- The Conditional probability for the sorting item X is calculated by Equation (A2).
- (3)
- The value of is obtained through Equation (A3).
A.3. SVM
References
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2016, 35, 68–80. [Google Scholar] [CrossRef]
- Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling Effective Programming and Flexible Management of Efficient Body Sensor Network Applications. IEEE Trans. Hum. Mach. Syst. 2013, 43, 115–133. [Google Scholar] [CrossRef]
- Fortino, G.; Giampa, V. PPG-based methods for non invasive and continuous blood pressure measurement: an overview and development issues in body sensor networks. In Proceedings of the IEEE International Workshop on Medical Measurements and Applications Proceedings, Ottawa, ON, Canada, 30 April–1 May 2010; pp. 10–13.
- Choi, H.; Naylon, J.; Luzio, S.; Beutler, J.; Birchall, J.; Martin, C.; Porch, A. Design and in Vitro Interference Test of Microwave Noninvasive Blood Glucose Monitoring Sensor. IEEE Trans. Microw. Theory Tech. 2015, 63, 3016–3025. [Google Scholar] [CrossRef] [PubMed]
- Gravina, R.; Fortino, G. Automatic Methods for the Detection of Accelerative Cardiac Defense Response. IEEE Trans. Affect. Comput. 2016, 7, 286–298. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Jafari, R. Coordination Analysis of Human Movements With Body Sensor Networks: A Signal Processing Model to Evaluate Baseball Swings. IEEE Sens. J. 2011, 11, 603–610. [Google Scholar] [CrossRef]
- Fortino, G.; Galzarano, S.; Gravina, R.; Li, W. A framework for collaborative computing and multi-sensor data fusion in body sensor networks. Inf. Fusion 2015, 22, 50–70. [Google Scholar] [CrossRef]
- Friedman, N.; Rowe, J.B.; Reinkensmeyer, D.J.; Bachman, M. The manumeter: A wearable device for monitoring daily use of the wrist and fingers. IEEE J. Biomed. Health Inform. 2014, 18, 1804–1812. [Google Scholar] [CrossRef] [PubMed]
- Su, S.W.; Hsieh, Y.T. Integrated Metal-Frame Antenna for Smartwatch Wearable Device. IEEE Trans. Antennas Propag. 2015, 63, 3301–3305. [Google Scholar] [CrossRef]
- Wannenburg, J.; Malekian, R. Body Sensor Network for Mobile Health Monitoring, a Diagnosis and Anticipating System. IEEE Sens. J. 2015, 15, 6839–6852. [Google Scholar] [CrossRef]
- Ignatenko, T.; Willems, F.M.J. Biometric Systems: Privacy and Secrecy Aspects. IEEE Trans. Inf. Forensic Secur. 2009, 4, 956–973. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, K.; Liang, X.; Su, Z. Security and privacy for mobile healthcare networks: From a quality of protection perspective. IEEE Wirel. Commun. 2015, 22, 104–112. [Google Scholar] [CrossRef]
- Lim, M.H.; Yuen, P.C. Entropy Measurement for Biometric Verification Systems. IEEE Trans. Cybern. 2015, 46, 1065–1077. [Google Scholar] [CrossRef] [PubMed]
- Zareen, F.J.; Jabin, S. Authentic mobile-biometric signature verification system. IET Biom. 2016, 5, 13–19. [Google Scholar] [CrossRef]
- He, D.; Wang, D. Robust Biometrics-Based Authentication Scheme for Multiserver Environment. IEEE Syst. J. 2014, 9, 816–823. [Google Scholar] [CrossRef]
- Jain, A.K.; Ross, A.; Prabhakar, S. An introduction to biometric recognition. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 4–20. [Google Scholar] [CrossRef]
- Hsieh, S.H.; Li, Y.H.; Tien, C.H.; Chang, C.C. Extending the Capture Volume of an Iris Recognition System Using Wavefront Coding and Super-Resolution. IEEE Trans. Cybern. 2016, 46, 3342–3350. [Google Scholar] [CrossRef] [PubMed]
- Chih-Lung, L.; Kuo-Chin, F. Biometric verification using thermal images of palm-dorsa vein patterns. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 199–213. [Google Scholar]
- Odinaka, I.; Lai, P.H.; Kaplan, A.D.; O’Sullivan, J.A.; Sirevaag, E.J.; Rohrbaugh, J.W. ECG Biometric Recognition: A Comparative Analysis. IEEE Trans. Inf. Forensic Secur. 2012, 7, 1812–1824. [Google Scholar] [CrossRef]
- Mathur, S.; Vjay, A.; Shah, J.; Das, S.; Malla, A. Methodology for partial fingerprint enrollment and authentication on mobile devices. In Proceedings of the 2016 International Conference on Biometrics (ICB), Halmstad, Sweden, 13–16 June 2016; pp. 1–8.
- Klonovs, J.; Petersen, C.K.; Olesen, H.; Hammershoj, A. ID Proof on the Go: Development of a Mobile EEG-Based Biometric Authentication System. IEEE Veh. Technol. Mag. 2013, 8, 81–89. [Google Scholar] [CrossRef]
- Peter, S.; Reddy, B.P.; Momtaz, F.; Givargis, T. Design of Secure ECG-Based Biometric Authentication in Body Area Sensor Networks. Sensors 2016, 16, 570. [Google Scholar] [CrossRef] [PubMed]
- Choudhary, T.; Manikandan, M.S. Robust Photoplethysmographic (PPG) Based Biometric Authentication for Wireless Body Area Networks and m-Health Applications. In Proceedings of the National Conference on Communication, Guwahati, Assam, India, 4–6 March 2016; pp. 1–6.
- Derawi, M.; Voitenko, I. Fusion of gait and ECG for biometric user authentication. In Proceedings of the 2014 International Conference of the Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 10–12 September 2014; pp. 1–4.
- Kim, D.J.; Chung, K.W.; Hong, K.S. Person Authentication using Face, Teeth and Voice Modalities for Mobile Device Security. IEEE Trans. Consum. Electron. 2010, 56, 2678–2685. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, H.; Tan, T.; Wang, J. Iris Image Classification Based on Hierarchical Visual Codebook. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1120–1133. [Google Scholar] [CrossRef] [PubMed]
- Farmanbar, M.; Toygar, Ö. A Hybrid Approach for Person Identification Using Palmprint and Face Biometrics. Int. J. Pattern Recognit. Artif. Intell. 2015, 29, 671–682. [Google Scholar] [CrossRef]
- Guzman, A.M.; Goryawala, M.; Wang, J.; Barreto, A.; Andrian, J.; Rishe, N.; Adjouadi, M. Thermal Imaging as a Biometrics Approach to Facial Signature Authentication. IEEE J. Biomed. Health Inform. 2013, 17, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Mayron, L.M. Biometric Authentication on Mobile Devices. IEEE Secur. Priv. 2015, 13, 70–73. [Google Scholar] [CrossRef]
- Nakanishi, I.; Yorikane, Y.; Itoh, Y.; Fukui, Y. Biometric Identity Verification Using Intra-Body Propagation Signal. In Proceedings of the 2007 Biometrics Symposium, Baltimore, MD, USA, 11–13 September 2007; pp. 1–6.
- Nakanishi, I.; Inada, T.; Sodani, Y.; Shigang, L. Performance Evaluation of Intra-palm Propagation Signals as Biometrics. In Proceedings of the International Conference on Biometrics and Kansei Engineering, Tokyo, Japan, 5–7 July 2013; pp. 91–94.
- Nakanishi, I.; Sodani, Y. SVM-Based Biometric Authentication Using Intra-Body Propagation Signals. In Proceedings of the IEEE International Conference on Advanced Video and Signal Based Surveillance, Boston, MA, USA, 29 August–1 September 2010; pp. 561–566.
- Rasmussen, K.B.; Roeschlin, M.; Martinovic, I.; Tsudik, G. Authentication using pulse-response biometrics. In Proceedings of the Proceedings of the Network and Distributed Systems Security Symposium (NDSS), San Diego, CA, USA, 23–26 February 2014; pp. 1–14.
- Xia, M.; Ma, J.; Li, J.; Liu, Y.; Zeng, Y.; Nie, Z. Gradient and SVM based biometric identification using human body communication. In Proceedings of the 2016 IEEE International Conference of Online Analysis and Computing Science (ICOACS), Chongqing, China, 28–29 May 2016; pp. 61–65.
- Wu, J.; Cai, Z.; Gao, Z. Dynamic K-Nearest-Neighbor with Distance and attribute weighted for classification. In Proceedings of the 2010 International Conference on Electronics and Information Engineering (ICEIE), Kyoto, Japan, 1–3 August 2010; pp. V1-356–V1-360.
- Shilton, A.; Palaniswami, M.; Ralph, D.; Tsoi, A.C. Incremental training of support vector machines. IEEE Trans. Neural Netw. 2005, 16, 114–131. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wang, J. Attribute weighted Naive Bayesian classification algorithm. In Proceedings of the 2010 5th International Conference on Computer Science and Education (ICCSE), Hefei, China, 24–27 August 2010; pp. 27–30.
- Wegmueller, M.S.; Kuhn, A.; Froehlich, J.; Oberle, M.; Felber, N.; Kuster, N.; Fichtner, W. An attempt to model the human body as a communication channel. IEEE Trans. Biomed. Eng. 2007, 54, 1851–1857. [Google Scholar] [CrossRef] [PubMed]
- Biggio, B.; Fumera, G.; Russu, P.; Didaci, L. Adversarial Biometric Recognition: A review on biometric system security from the adversarial machine-learning perspective. IEEE Signal Process. Mag. 2015, 32, 31–41. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. Training v-support vector classifiers: Theory and algorithms. Neural Comput. 2001, 13, 2119–2147. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model A | Model B | Model C | |
|---|---|---|---|
| Skin | 0.84 | 0.84 | 0.84 |
| Fat | 2.30 | 4.76 | 7.60 |
| Muscle | 17.86 | 15.4 | 12.56 |
| Cortical bone | 3.36 | 3.36 | 3.36 |
| Bone marrow | 3.64 | 3.64 | 3.64 |
| Frequency Bands | Volunteers | Days | Times per Day | Sample Data per Time | Total | |
|---|---|---|---|---|---|---|
| Experiment 1 | 0.3 MHz–1500 MHz | 10 | 3 | 60 | 1601 | 2,881,800 |
| Experiment 2 | 650 MHz–750 MHz | 10 | 5 | 6 | 21 | 6300 |
| Threshold | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|---|---|
| FAR | 1.09% | 5.24% | 5.79% | 8.26% | 15.2% | 14.5% | 17.6% | 17.4% | 17.4% | 17.4% |
| FRR | 77.7% | 36.8% | 6.74% | 13.3% | 3.33% | 4.17% | 4.17% | 5.0% | 5.0% | 5.0% |
| Volunteer | TATM | KNN | SVM | NBM | ||||
|---|---|---|---|---|---|---|---|---|
| FAR | FRR | FAR | FRR | FAR | FRR | FAR | FRR | |
| 1 | 0.95% | 0 | 7.41% | 8.33% | 0 | 0 | 0 | 16.67% |
| 2 | 15.24% | 0 | 8.33% | 33.33% | 7.41% | 58.33% | 7.41% | 41.67% |
| 3 | 3.81% | 25% | 4.63% | 66.67% | 5.56% | 25.0% | 10.19% | 41.67% |
| 4 | 1.89% | 0 | 3.70% | 8.33% | 2.78% | 8.33% | 3.70% | 8.33% |
| 5 | 0 | 8.33% | 0 | 25% | 0 | 33.33% | 0 | 41.67% |
| 6 | 13.21% | 0 | 6.48% | 50.0% | 5.56% | 8.33% | 4.63% | 25.0% |
| 7 | 6.67% | 25% | 0.93% | 58.33% | 1.85% | 91.67% | 0.93% | 25.0% |
| 8 | 3.77% | 9.09% | 3.70% | 33.33% | 10.19% | 16.67% | 3.70% | 41.67% |
| 9 | 12.38% | 0% | 6.48% | 91.67% | 3.70% | 91.67% | 7.41% | 100% |
| 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Average | 5.79% | 6.74% | 4.17% | 37.5% | 3.37% | 33.33% | 3.80% | 34.17% |
| Algorithm | TATM | KNN | SVM | NBM |
|---|---|---|---|---|
| Running time (s) | 0.019 | 0.310 | 0.0385 | 0.168 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Liu, Y.; Nie, Z.; Qin, W.; Pang, Z.; Wang, L. An Approach to Biometric Verification Based on Human Body Communication in Wearable Devices. Sensors 2017, 17, 125. https://doi.org/10.3390/s17010125
Li J, Liu Y, Nie Z, Qin W, Pang Z, Wang L. An Approach to Biometric Verification Based on Human Body Communication in Wearable Devices. Sensors. 2017; 17(1):125. https://doi.org/10.3390/s17010125
Chicago/Turabian StyleLi, Jingzhen, Yuhang Liu, Zedong Nie, Wenjian Qin, Zengyao Pang, and Lei Wang. 2017. "An Approach to Biometric Verification Based on Human Body Communication in Wearable Devices" Sensors 17, no. 1: 125. https://doi.org/10.3390/s17010125
APA StyleLi, J., Liu, Y., Nie, Z., Qin, W., Pang, Z., & Wang, L. (2017). An Approach to Biometric Verification Based on Human Body Communication in Wearable Devices. Sensors, 17(1), 125. https://doi.org/10.3390/s17010125