
Underwater Electromagnetic Sensor Networks—Part I: Link Characterization †

 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Section
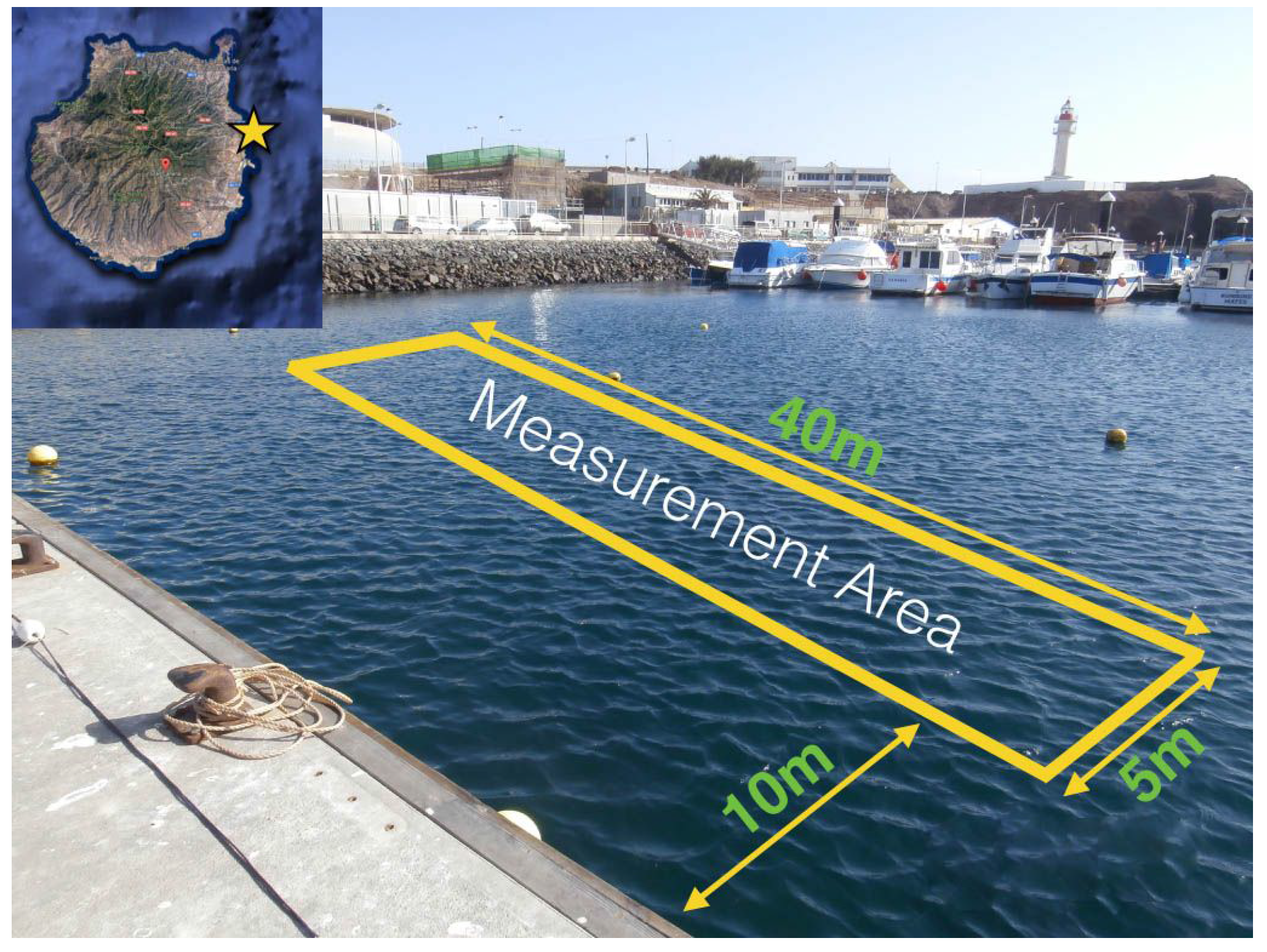
2.1. Measurement Site
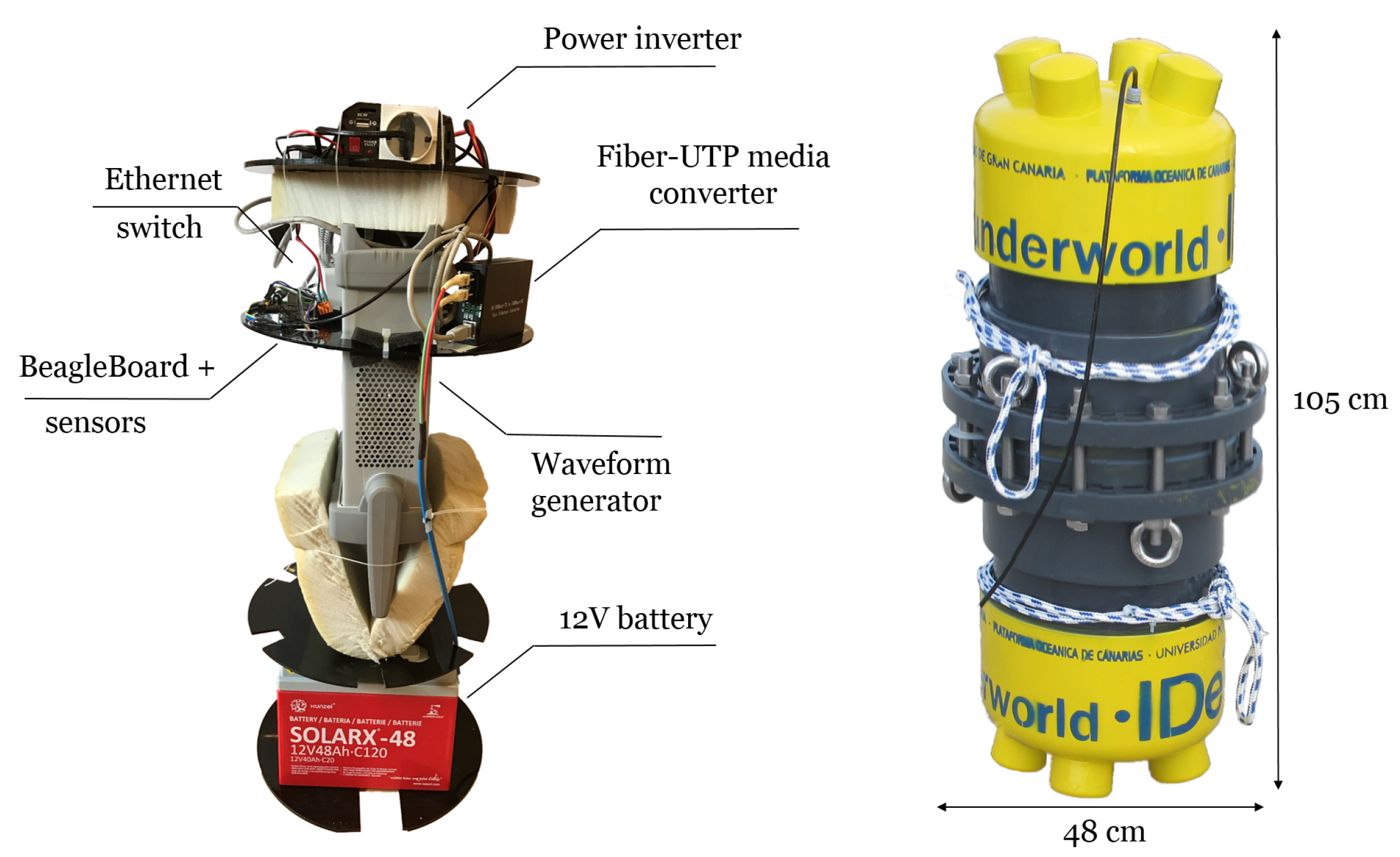
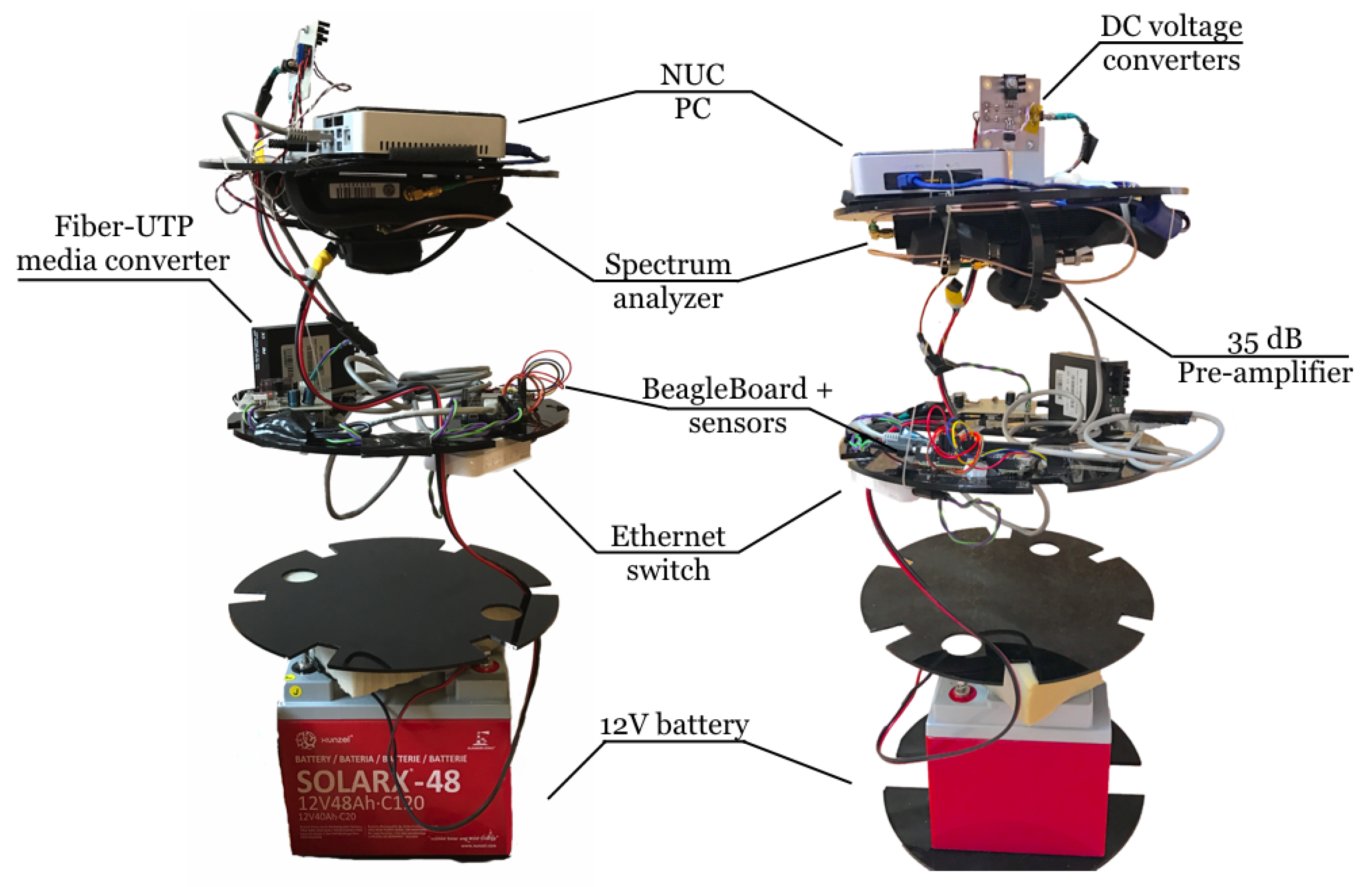
2.2. Testbed
2.2.1. Measuring System
- Access to the battery for charging;
- ON/OFF switch;
- Fiber cable link to control equipment from the pier;
- Coaxial for antenna connection.
2.2.2. Monitoring and Control
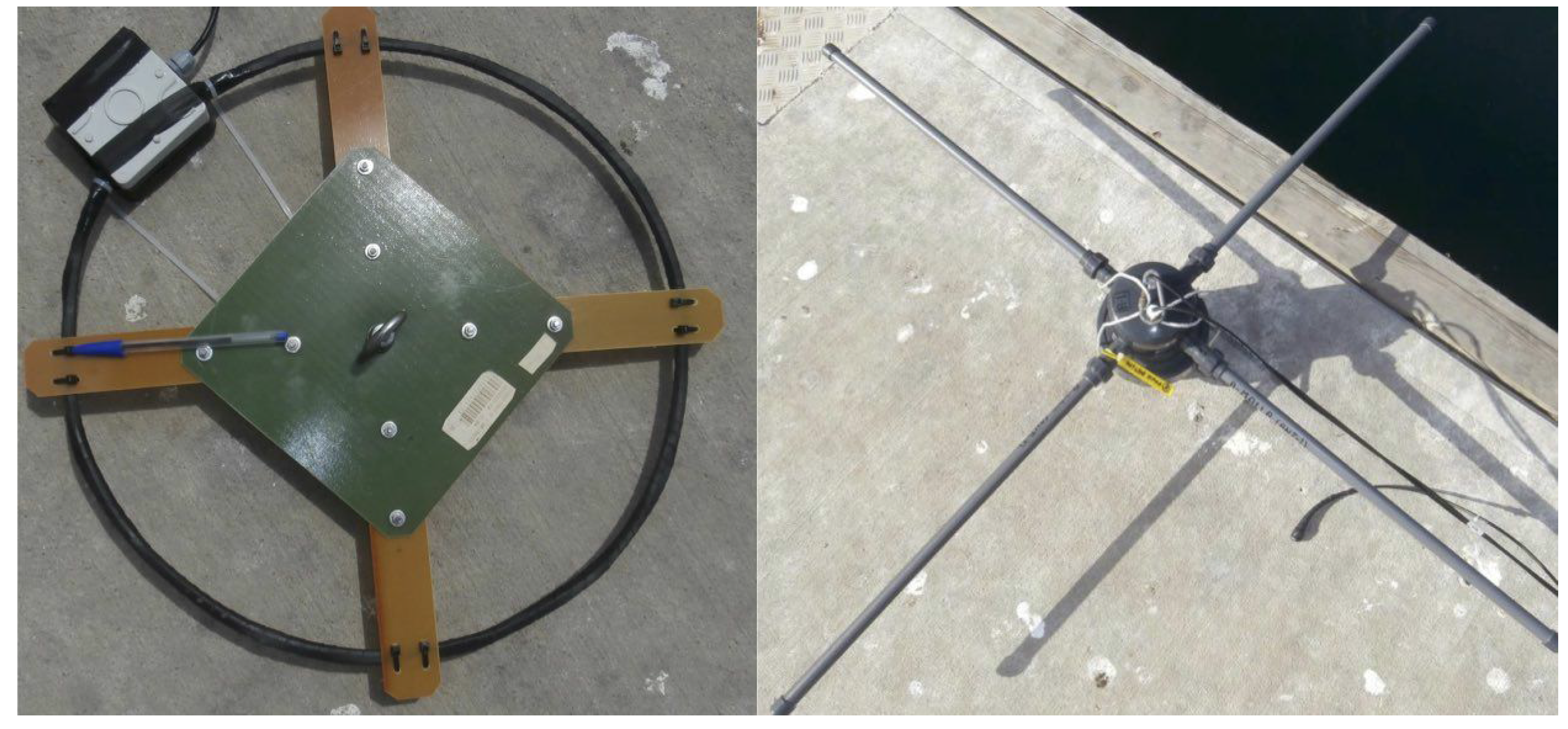
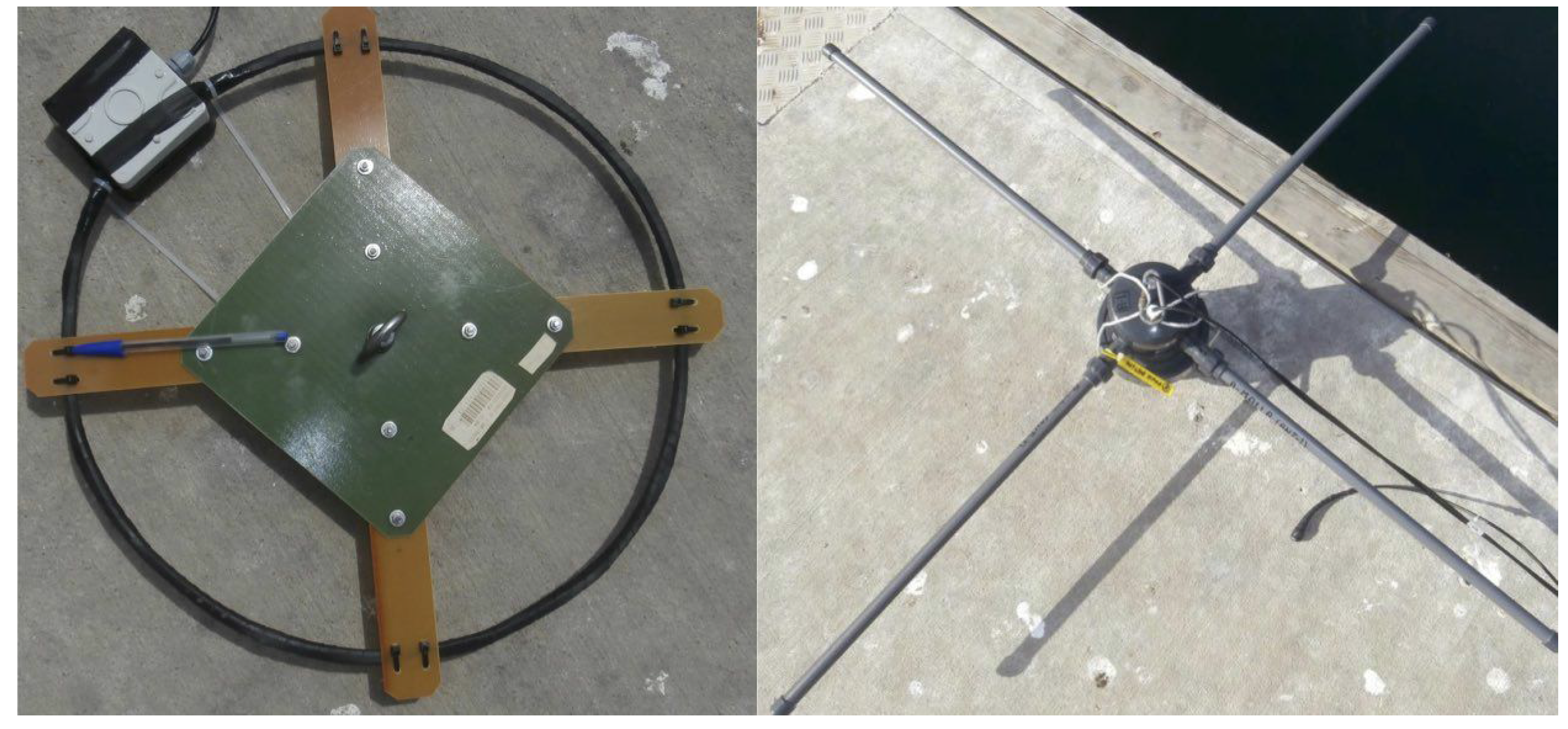
2.3. Set of Antennas
- Insulated dipoles;
- Insulated dipoles with uninsulated tips;
- Magnetic loops of 22 and 40 cm.
2.4. Setup Procedures
2.4.1. Launching Procedure
- Variation of horizontal separation between the centres of antennas;
- Variation of vertical separation;
- Sea to air measurements.
2.4.2. Measuring Procedure
- 10–100 KHz;
- 100 KHz–1 MHz;
- 1–20 MHz.
2.5. Simulation Procedures
3. Results
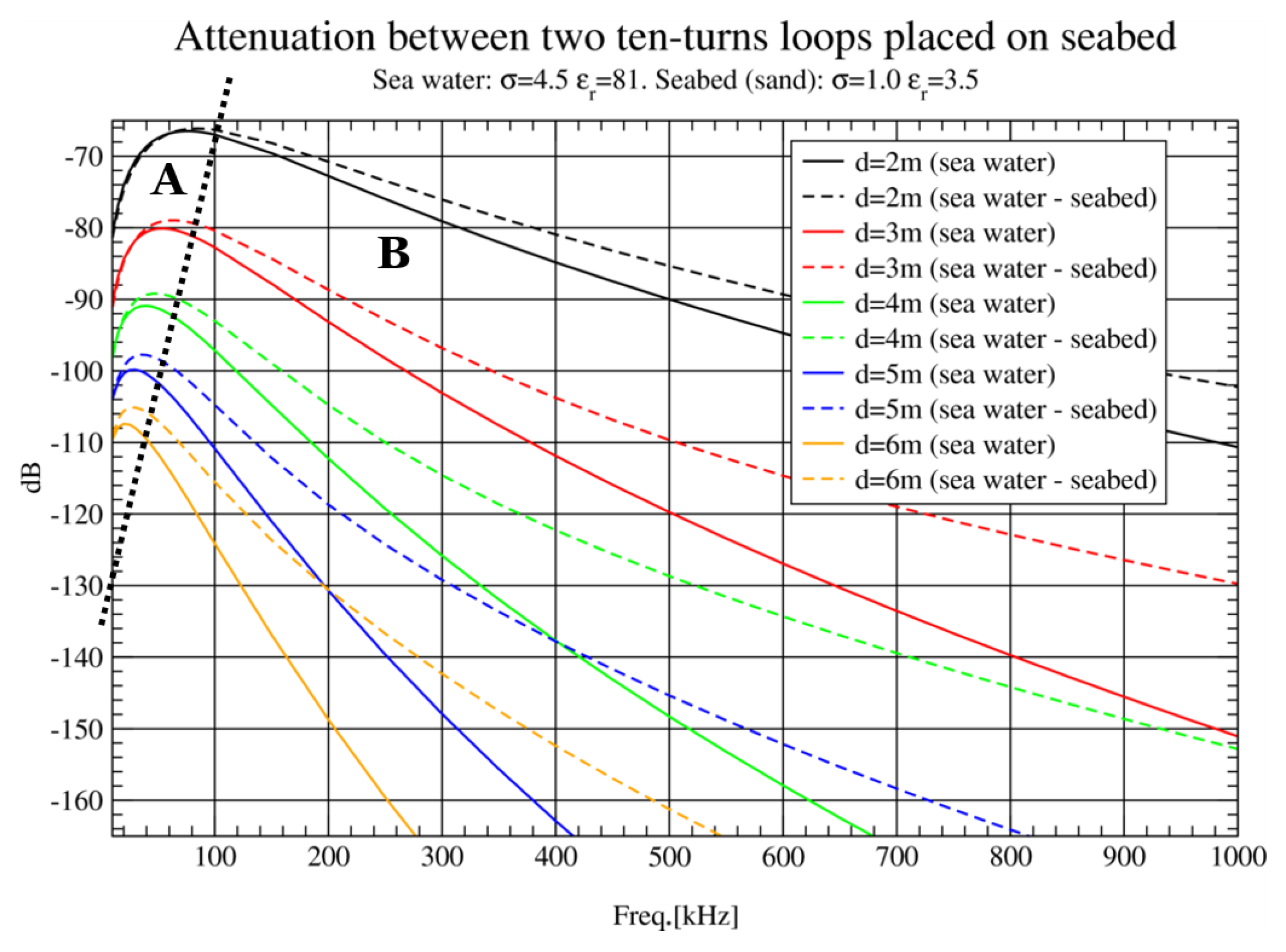
3.1. Seabed Influence in Simulations
3.2. Electric Dipole Performance
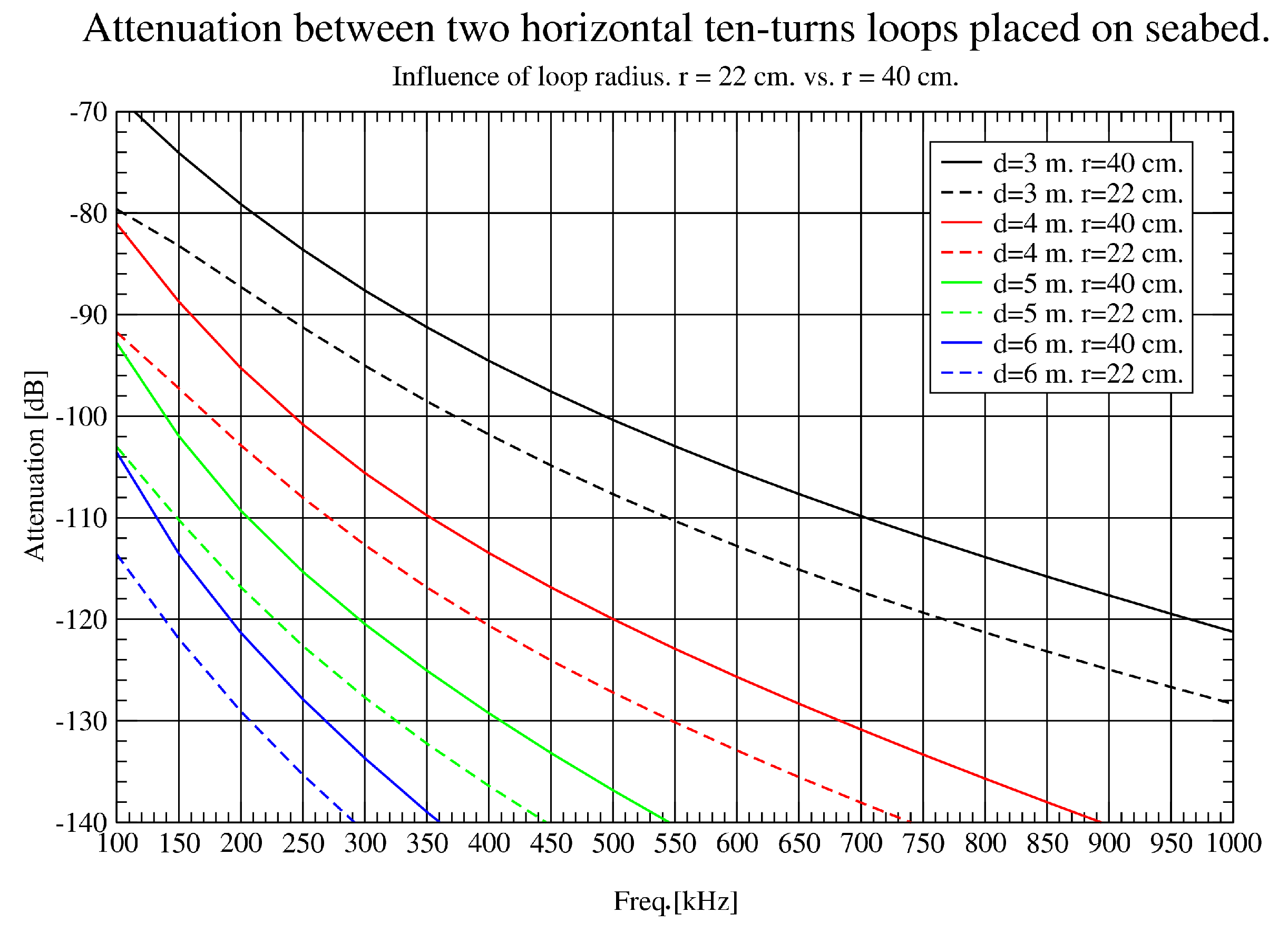
3.3. Simulated Impact of Loop Antenna Radius
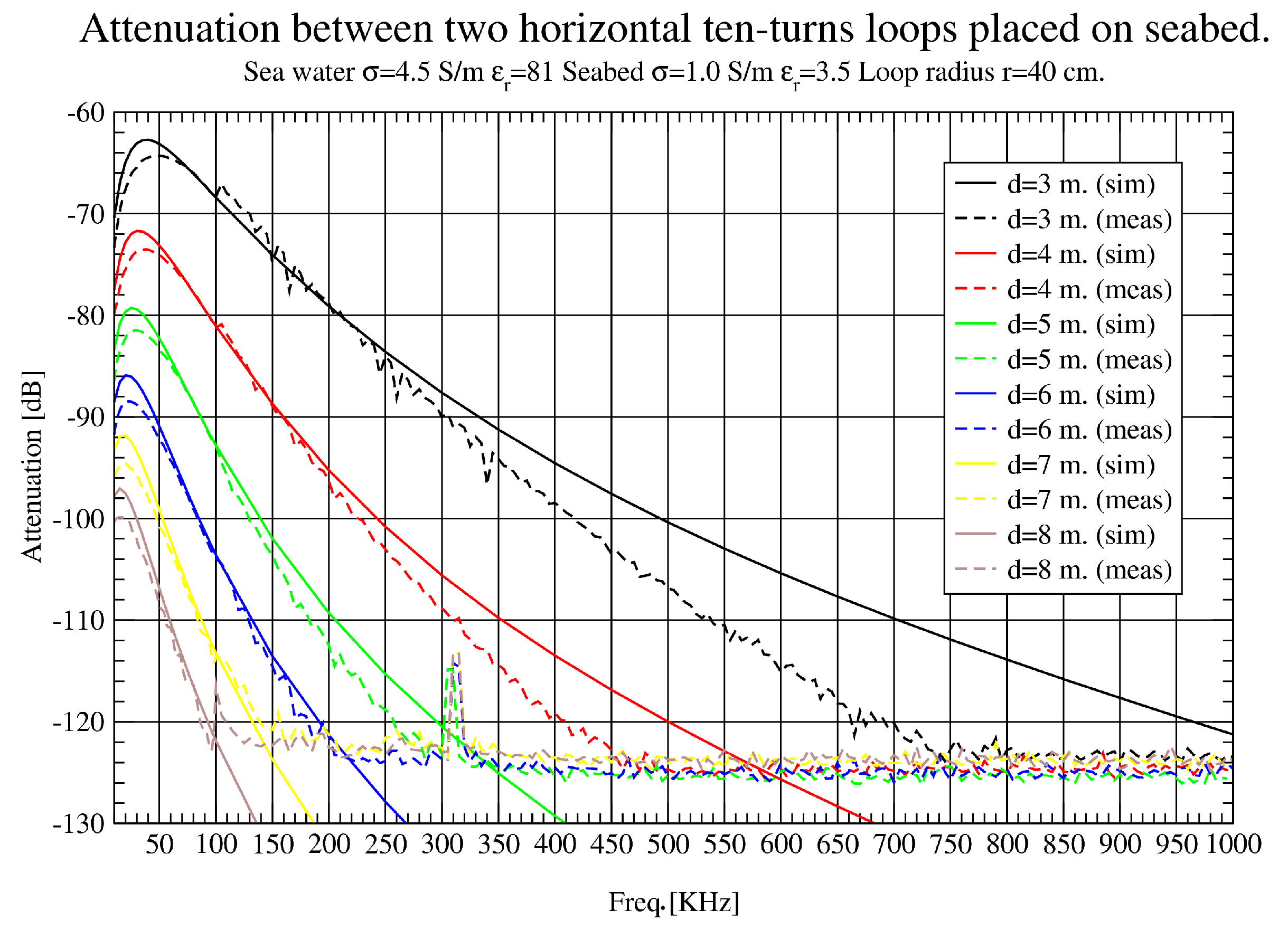
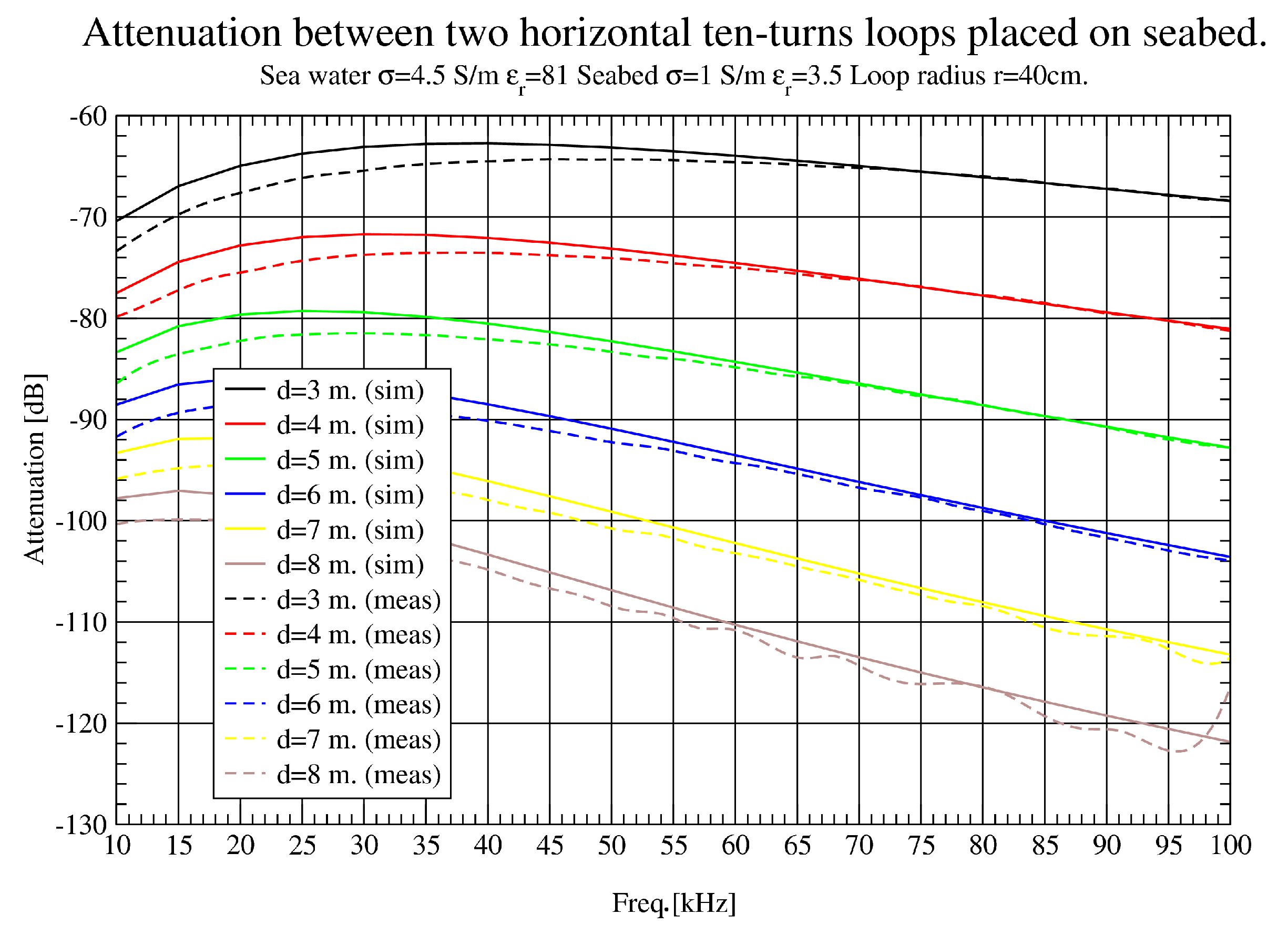
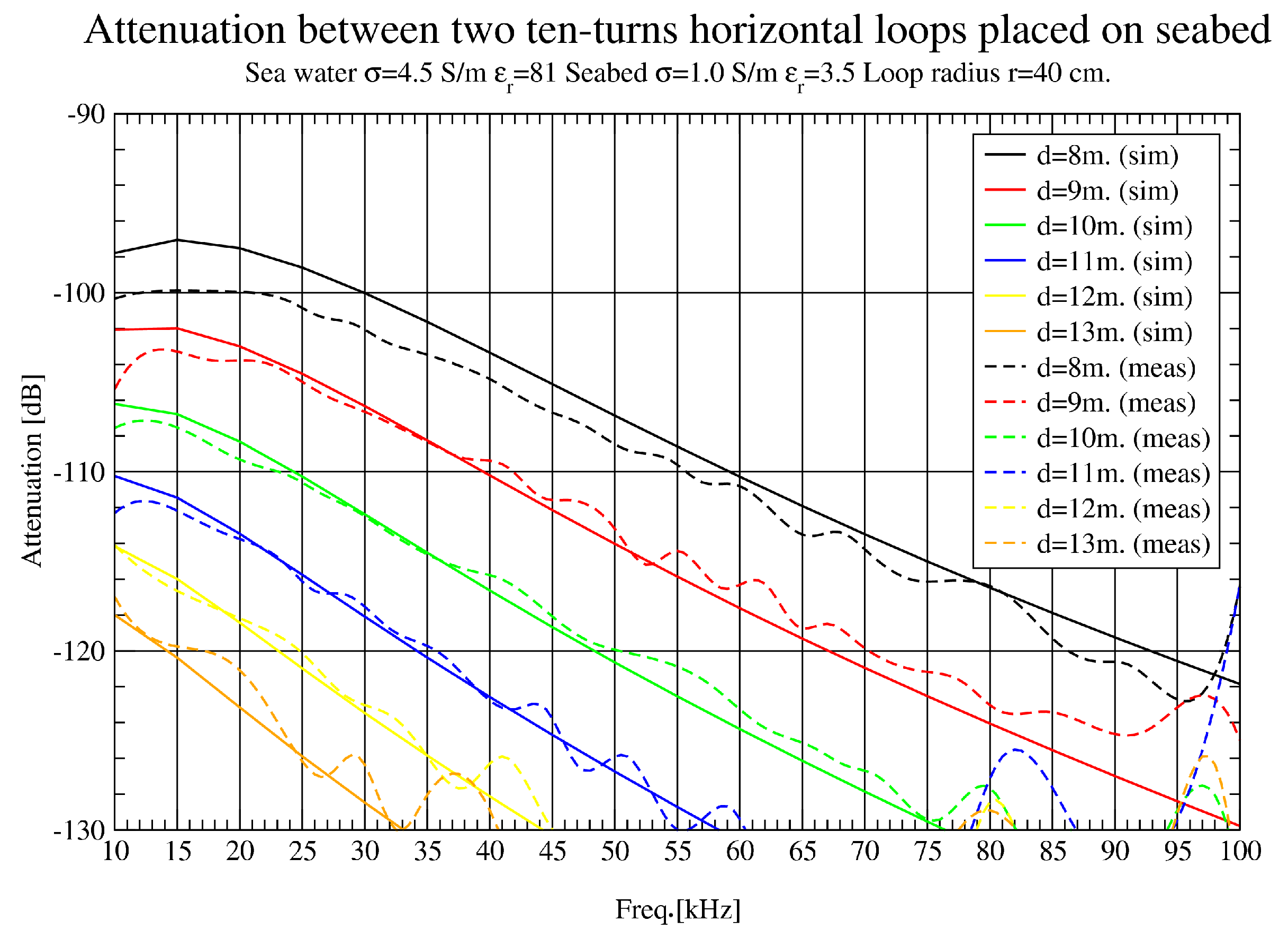
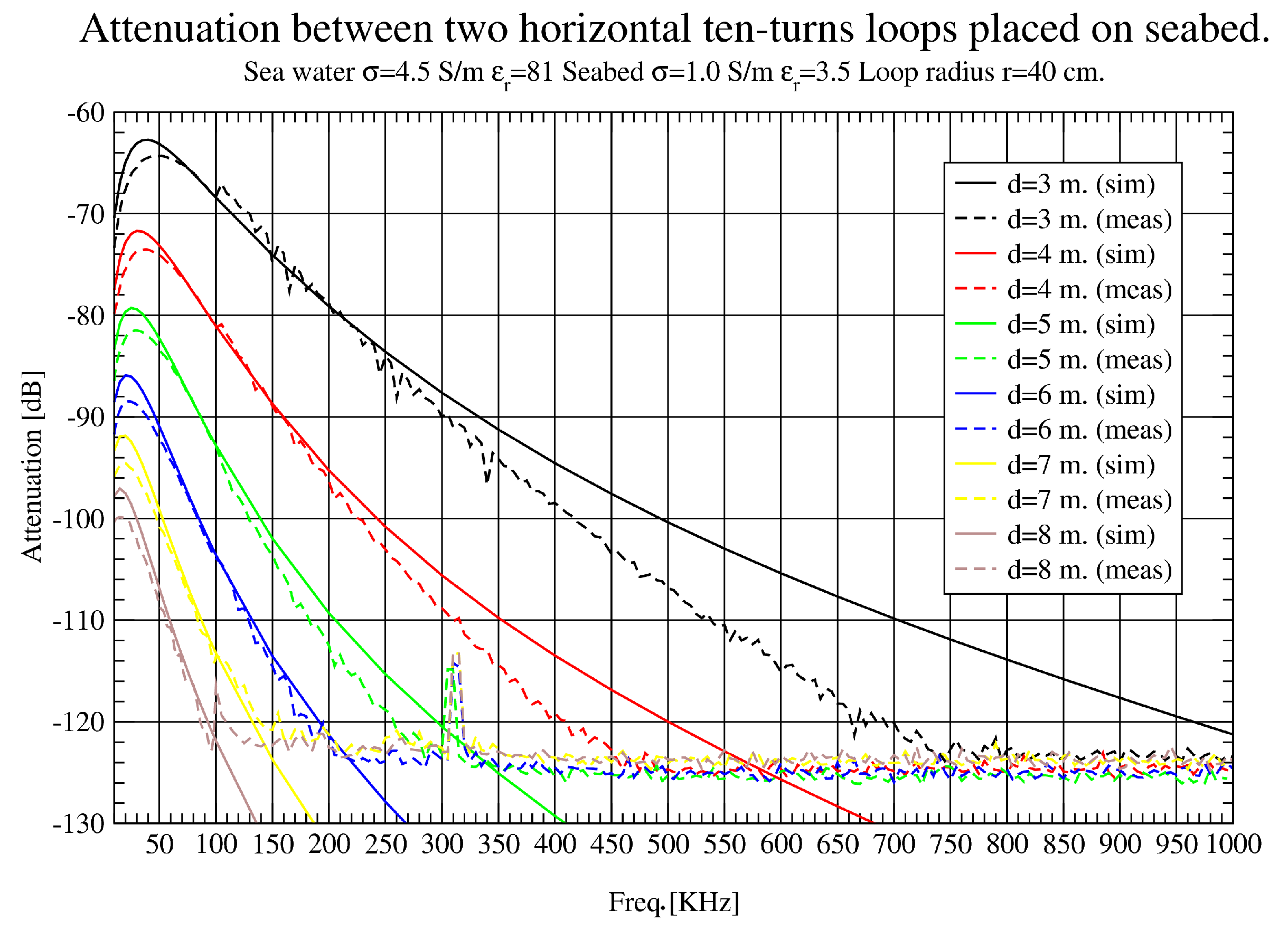
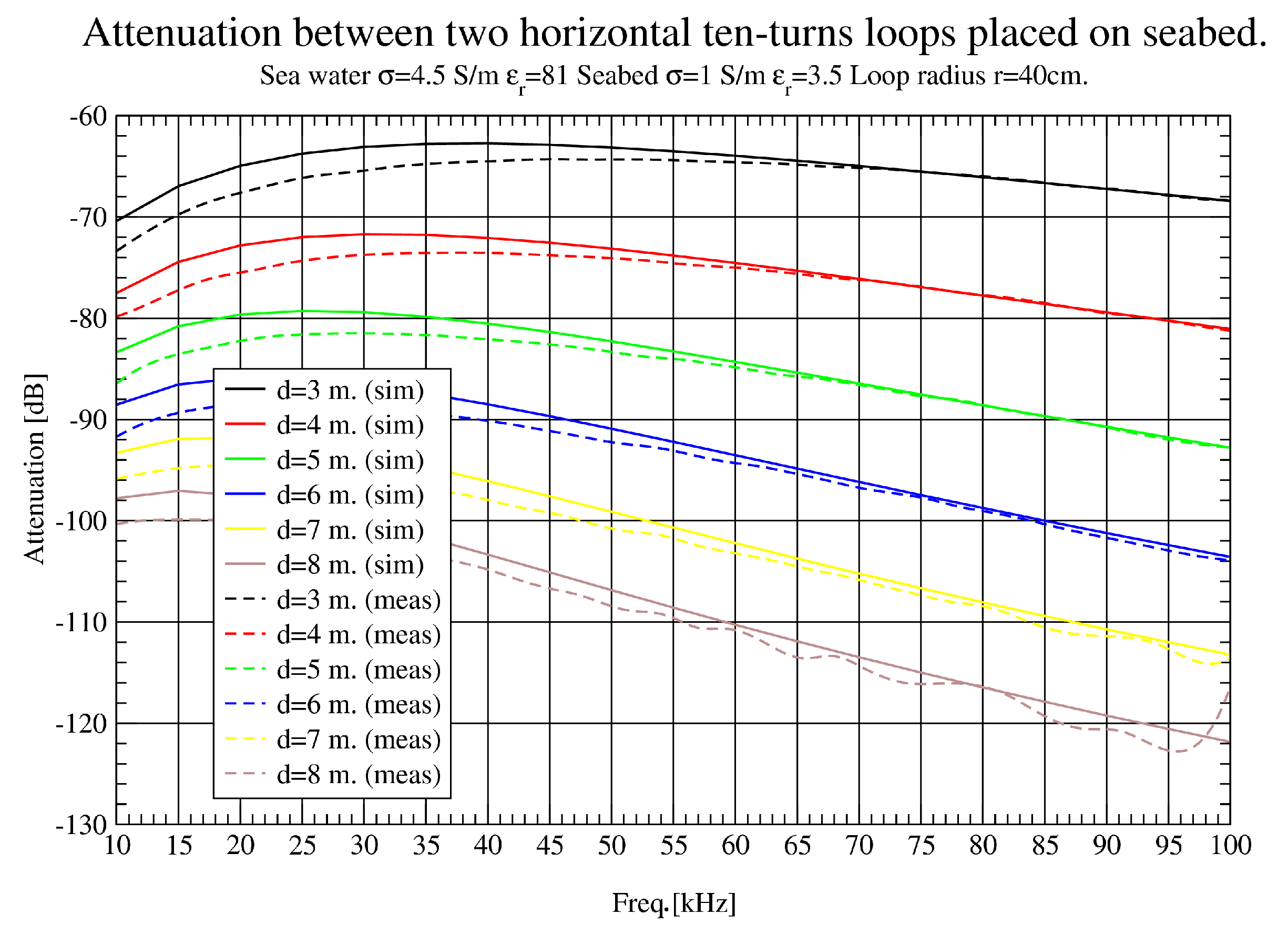
3.4. Validation of Simulations with Horizontal Variations
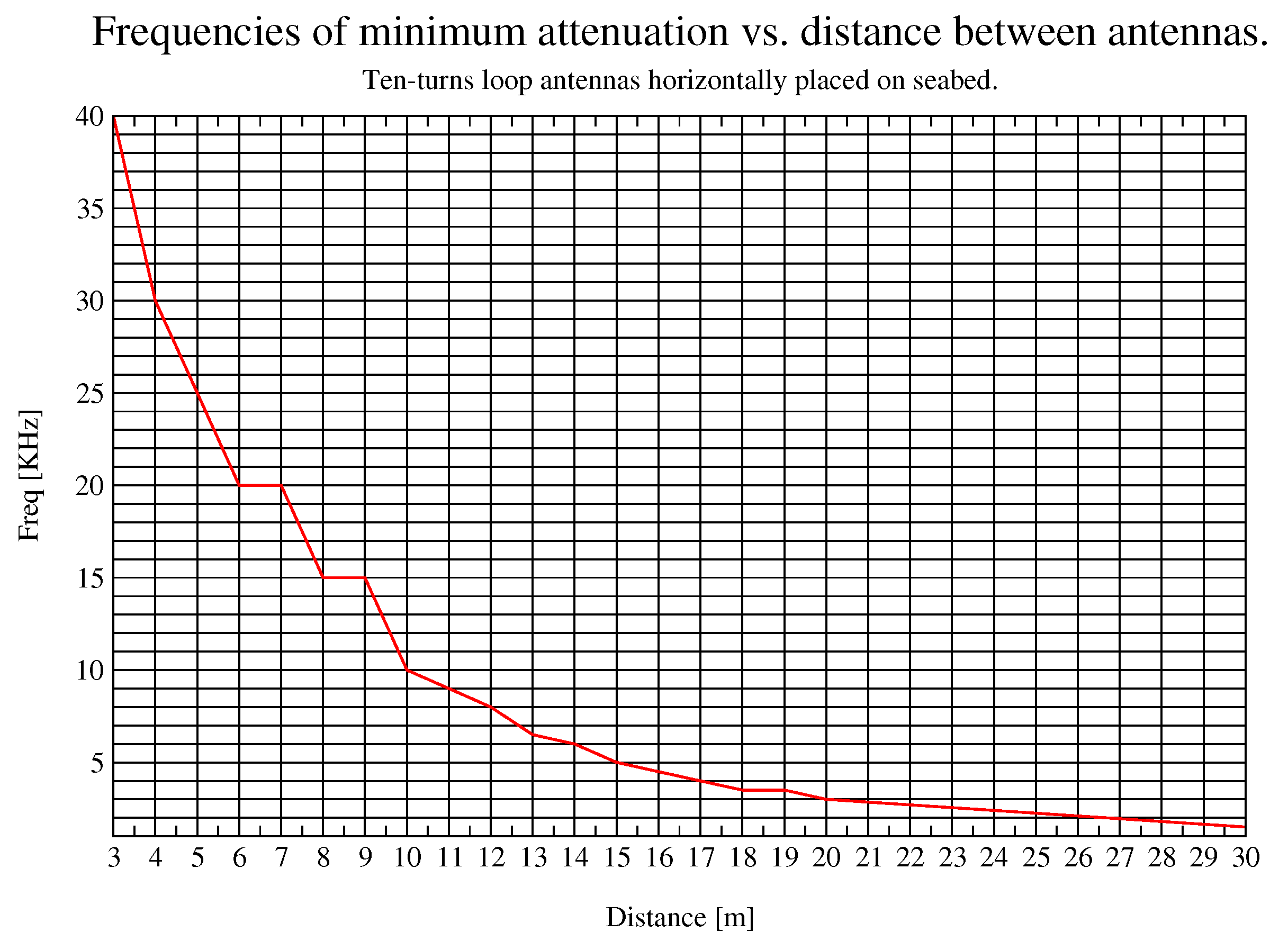
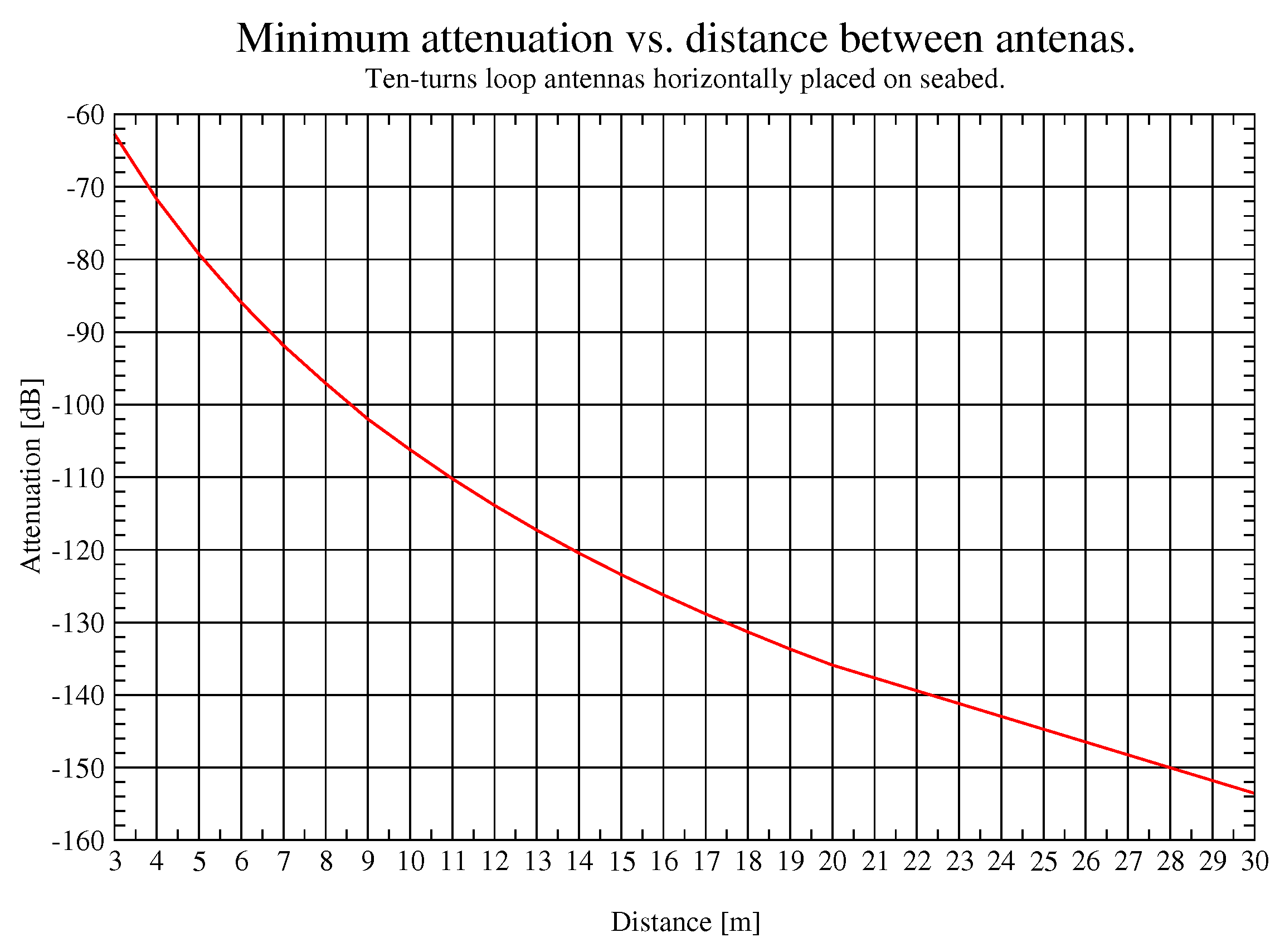
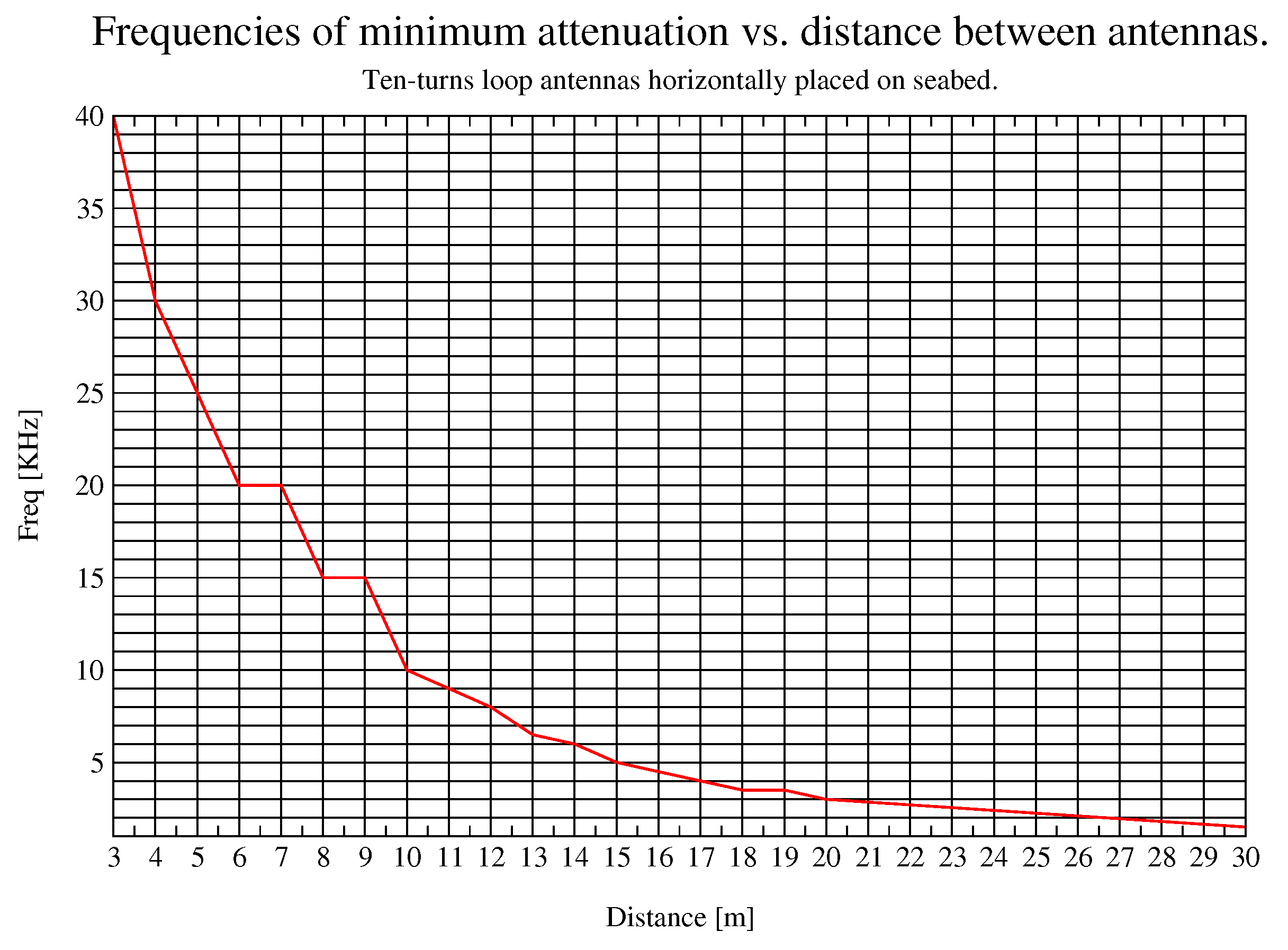
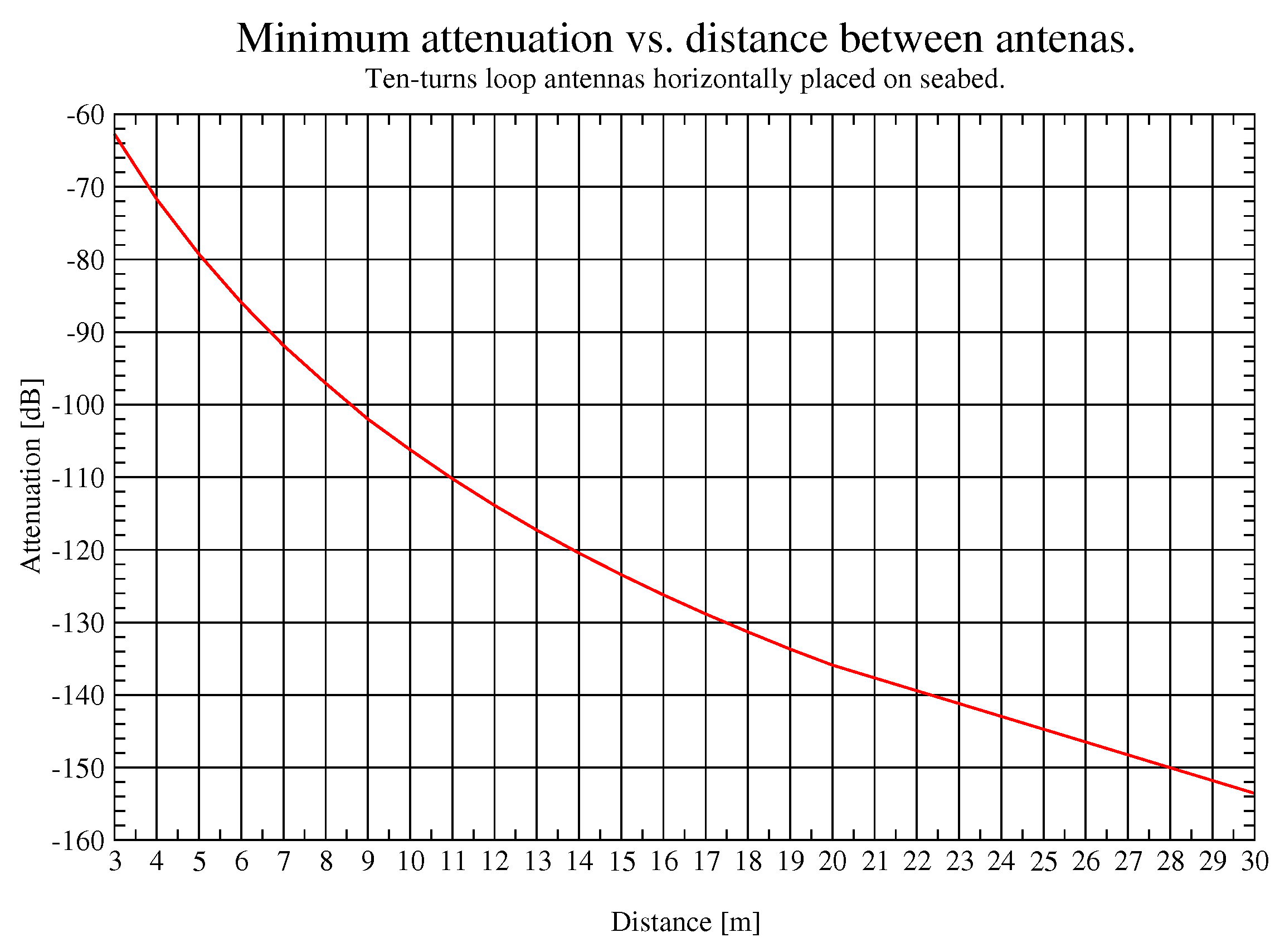
3.5. Optimum Frequency for a Given Distance
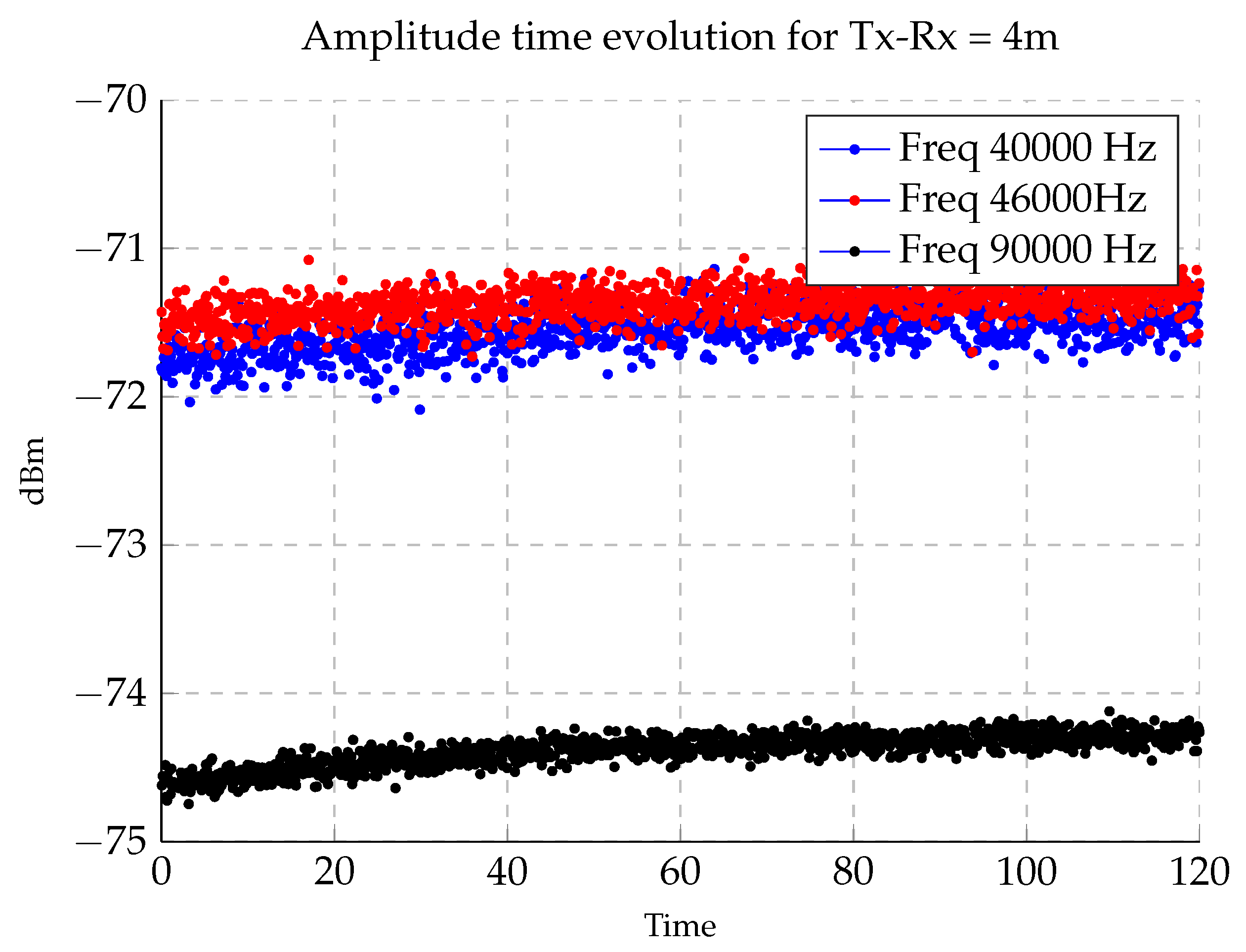
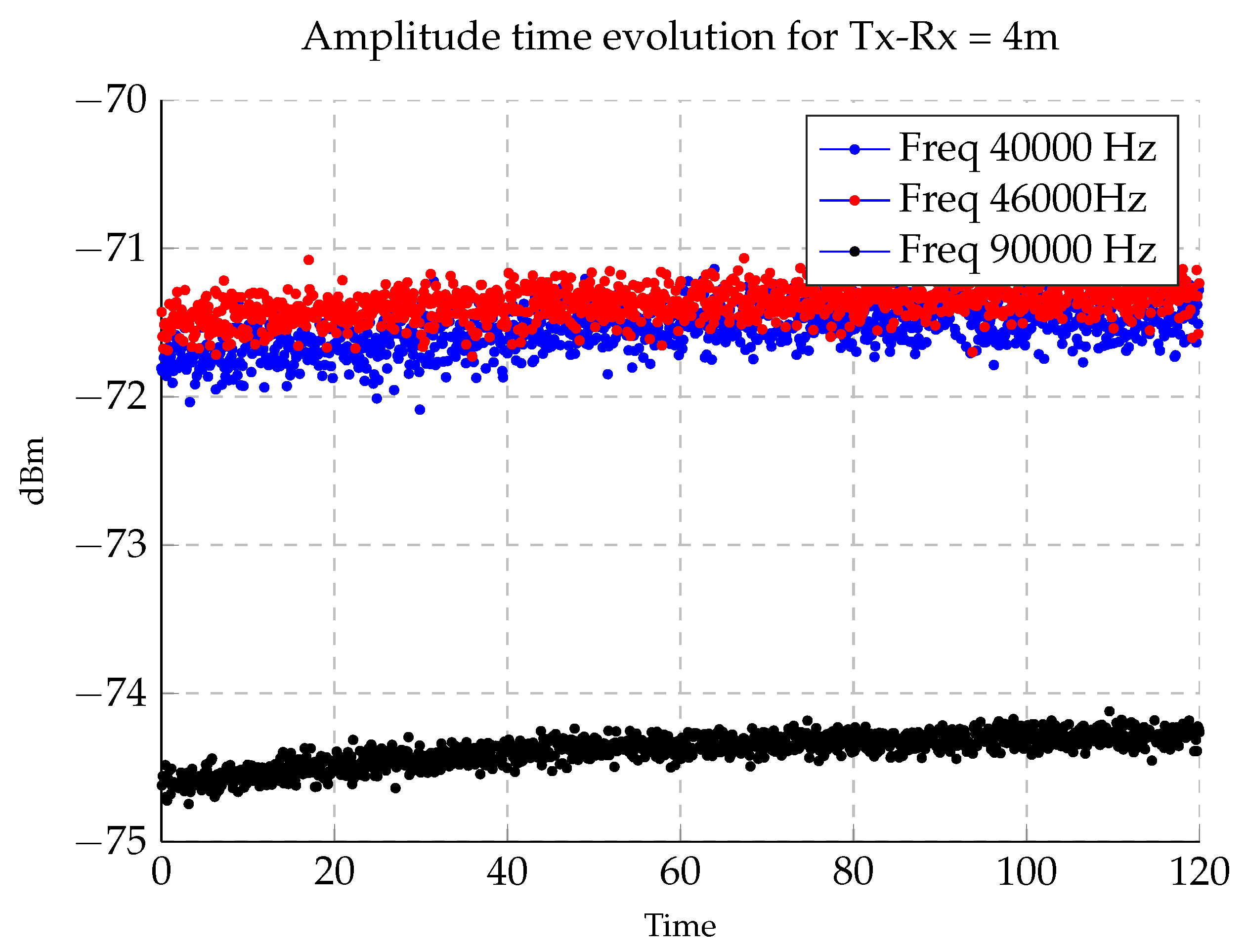
3.6. Channel Time Variation
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| UWSNs | Underwater Wireless Sensor Networks |
| EM | Electromagnetic |
| MoM | Method of Moments |
| PVC | Polyvinyl chloride |
| RF | Radio Frequency |
| UTP | Unshielded Twisted Pair |
| DC | Direct Current |
| FEKO | FEldberechnung für Körper mit beliebiger Oberfläche |
| RBW | Resolution Bandwidth |
References
- Payne, J.L.; Bush, A.M.; Heim, N.A.; Knope, M.L.; McCauley, D.J. Ecological selectivity of the emerging mass extinction in the oceans. Science 2016. [Google Scholar] [CrossRef] [PubMed]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Giles, J.W.; Bankman, I.N. Underwater Optical Communications Systems. Part 2: Basic Design Considerations. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–21 Octomber 2005; Volume 3, pp. 1700–1705.
- Au, W.W.; Nachtigall, P.E.; Pawloski, J.L. Acoustic effects of the ATOC signal (75 Hz, 195 dB) on dolphins and whales. J. Acoust. Soc. Am. 1997, 101, 2973–2977. [Google Scholar] [CrossRef] [PubMed]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Cella, U.M.; Johnstone, R.; Shuley, N. Electromagnetic Wave Wireless Communication in Shallow Water Coastal Environment: Theoretical Analysis and Experimental Results. In Proceedings of the Fourth ACM International Workshop on UnderWater Networks, Berkeley, CA, USA, 3 November 2009.
- Shaw, A.; Al-Shamma’a, A.I.; Wylie, S.R.; Toal, D. Experimental Investigations of Electromagnetic Wave Propagation in Seawater. In Proceedings of the 2006 European Microwave Conference, Manchester, UK, 10–15 September 2006; pp. 572–575.
- Pelavas, N.; Heard, G.J.; Schattschneider, G. Development of an Underwater Electric Field Modem. In Proceedings of the 2014 Oceans, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5.
- Siegel, M.; King, R. Electromagnetic propagation between antennas submerged in the ocean. IEEE Trans. Antennas Propag. 1973, 21, 507–513. [Google Scholar] [CrossRef]
- Somaraju, R.; Trumpf, J. Frequency, temperature and salinity variation of the permittivity of seawater. IEEE Trans. Antennas Propag. 2006, 54, 3441–3448. [Google Scholar] [CrossRef]
- Lucas, J.; Yip, C. A determination of the propagation of electromagnetic waves through seawater. Underw. Technol. 2007, 27, 1–9. [Google Scholar] [CrossRef]
- Jiménez, E.; Mena, P.; Quintana, G.; Dorta, P.; Perez-Alvarez, I.; Zazo, S.; Perez, M.; Quevedo, E. Investigation on Radio Wave Propagation in Shallow Seawater: Simulations and Measurements. In Proceedings of the Third Underwater Communications Conference, Lerici, Italy, 30 August–1 September 2016.
- Mena, P.; Dorta-Naranjo, P.; Quintana, G.; Pérez-Álvarez, I.; Jiménez, E.; Zazo, S.; Pérez, M.; Cardona, L.; Hernández, J.J. Experimental Testbed for Seawater Channel Characterization. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016.
- Yip, C.; Goudevenos, A.; Lucas, J. Antenna design for the propagation of EM waves in seawater. Underw. Technol. 2008, 28, 11–20. [Google Scholar] [CrossRef]
- Honglei, W.; Kunde, Y.; Kun, Z. Performance of Dipole Antenna in Underwater Wireless Sensor Communication. IEEE Sens. J. 2015, 15, 6354–6359. [Google Scholar] [CrossRef]
- Zoksimovski, A.; Sexton, D.; Stojanovic, M.; Rappaport, C. Underwater electromagnetic communications using conduction—Channel characterization. Ad Hoc Netw. 2015, 34, 42–51. [Google Scholar] [CrossRef]








© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quintana-Díaz, G.; Mena-Rodríguez, P.; Pérez-Álvarez, I.; Jiménez, E.; Dorta-Naranjo, B.-P.; Zazo, S.; Pérez, M.; Quevedo, E.; Cardona, L.; Hernández, J.J. Underwater Electromagnetic Sensor Networks—Part I: Link Characterization. Sensors 2017, 17, 189. https://doi.org/10.3390/s17010189
Quintana-Díaz G, Mena-Rodríguez P, Pérez-Álvarez I, Jiménez E, Dorta-Naranjo B-P, Zazo S, Pérez M, Quevedo E, Cardona L, Hernández JJ. Underwater Electromagnetic Sensor Networks—Part I: Link Characterization. Sensors. 2017; 17(1):189. https://doi.org/10.3390/s17010189
Chicago/Turabian StyleQuintana-Díaz, Gara, Pablo Mena-Rodríguez, Iván Pérez-Álvarez, Eugenio Jiménez, Blas-Pablo Dorta-Naranjo, Santiago Zazo, Marina Pérez, Eduardo Quevedo, Laura Cardona, and J. Joaquín Hernández. 2017. "Underwater Electromagnetic Sensor Networks—Part I: Link Characterization" Sensors 17, no. 1: 189. https://doi.org/10.3390/s17010189