1. Introduction
Light Detection and Ranging (LiDAR) is a remote sensing method that uses a laser beam to measure target ranges. There are several ranging methods can be applied in LiDAR, such as triangulation, interferometry, pulsed time-of-flight (TOF) measurement, and phase-shift measurement [
1]. Triangulation, interferometry and phase-shift measurement have higher measurement accuracy, which can reach millimeter or even micron level [
2], but the pulsed TOF measurement is more effective over medium-long range distances [
3]. In a pulsed TOF LiDAR system, a time-pickoff circuit is an essential component to measure the time interval between the emitted pulse and the returned pulse, so that the parameter determination of the time-pickoff circuit is a crucial issue for designing and implementing a TOF LiDAR system.
Due to atmospheric absorption and scattering, uncertain reflectivity of target surfaces, noise interference and other factors, the measured time interval is usually not fixed, interfering with the LiDAR measurement accuracy and precision [
4]. The main inaccuracy sources in the time-pickoff circuit consist of walk error, timing jitter, drift and nonlinearity [
5]. Walk error is defined as the timing error resulting from the variation of the amplitude and shape of the input pulses, which is the main systematic error of LiDAR [
5]. Timing jitter refers to the timing deviation caused by noise such as statistical fluctuations existing in the shape of the detected pulses, which is the largest random error [
6]. Drift and nonlinearity can be reduced to a negligible level by periodic calibration [
6]. Therefore, reducing the walk error and timing jitter is of great concern so that the time-pickoff circuit can be designed to obtain an accurate time interval.
Theoretically speaking, constant fraction determinators (CFDs) are widely used in time-pickoff circuits to eliminate the walk error due to their insensitivity to pulse amplitude [
7]. However, there are two imperfections in CFDs that need to be overcome in real applications. Firstly, the response time of comparator of a CFD is limited by the overdrive of the comparator and the slope of the input pulses, which can generate an extra-walk-error [
8]. Secondly, timing jitter in a CFD is influenced by the increase of the pulse amplitudes [
6]. Thus, the walk error and the timing jitter are not actually reduced adequately if only a CFD is used in the time-pickoff circuit, especially when the input pulse amplitude varies over a wide dynamic range [
7]. This paper proposes a ranging circuit parameter determination method for improving the measurement accuracy and precision of LiDAR systems.
There are three types of methods to study the relationship between the parameters determination (circuit parameter and pulse parameter) and the range precision, which are theoretical analysis methods, simulation methods and empirical methods. For the theoretical analysis method, Cramer–Rao lower bound (CRLB) on range estimate and the probability density distribution of range data have been studied, which can be utilized as a limit for the range estimate to describe the range properties [
9,
10]. For simulation methods, Monte-Carlo simulation is the most common model, which is utilized to evaluate the timing performance of a CFD as an effective way to optimize scintillation-detector timing systems [
11]. From 2010 to 2016, Monte-Carlo simulations combining CRLB were used to evaluate the influenced on range precision of different parameters such as the amplitude, pulse width and bias and tilt angle of flat surfaces [
12,
13]. For empirical methods, several researchers have utilized experiments to illustrate the influence on range precision of pulse density, noise and atmosphere, and have proposed methods to improve the range precision [
14,
15,
16]. These simulations provide a diversity of simulated data for the development of application that should be optimized for a real system [
14]. In general, simulation methods and empirical method lack in-depth analysis of how the range precision is influenced by the circuit parameters and pulse parameters and thus they cannot guild the design and optimization of the time-pickoff circuit based on AGC and timing discriminators. In this paper, we simulated the range measurement by using Monte-Carlo simulation and implemented a series of experiments for adjusting the parameters to optimize the output of the time-pickoff circuit. The resulting analysis is based on a combination of simulation and circuit design.
The main contributes of this study may be stated as follows: first, a high-performance time-pickoff circuit for a LiDAR system was put forward based on AGC and timing discriminators, including CFD, which can effectively reduce walk error and timing jitter. Second, the related parameters including the pulse amplitude, the pulse width, the attenuation factor and the delay time involved in time-pickoff circuit are simulated for discussing their influence on the range precision. Finally, a series of experiments were performed to verify the way the range precision is influenced by the ranging circuit parameters.
2. System Design
2.1. Lab-Build LiDAR System
To acquire the accurate time interval between the emitted and the returned pulse, a pulsed TOF LiDAR system was constructed based on the time-pickoff circuit including AGC and timing discriminators [
17]. An assembly view of the lab-build LiDAR system appears in
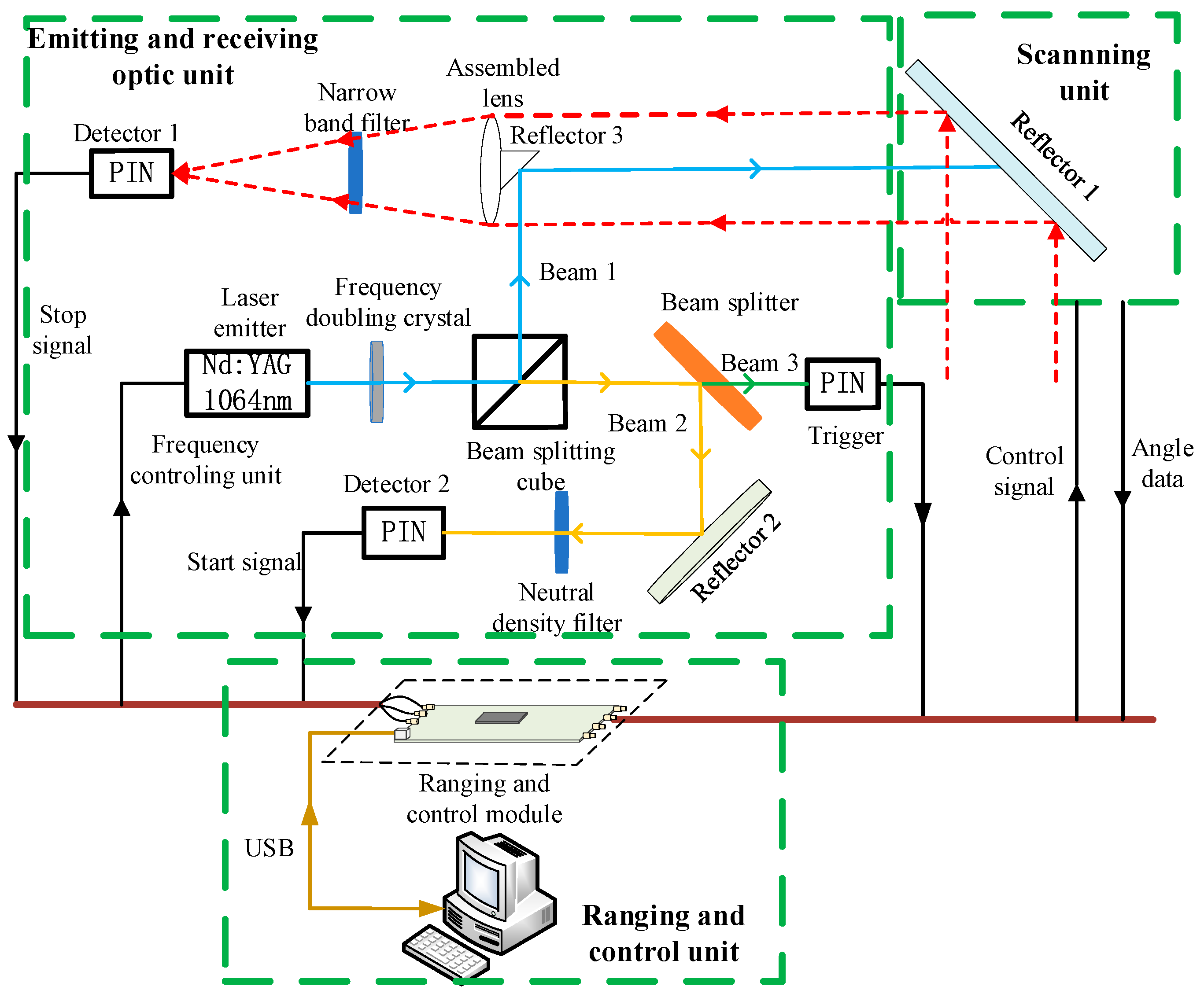
Figure 1. It is divided into three parts: emitting and receiving unit, ranging and control unit and scanning unit.
In the emitting and receiving unit, a solid state Q-switched laser set at 1064 nm is employed as the laser emitter, whose repetition frequency is from 1 kHz to 5 kHz. The energy of a laser pulse is equal approximately to 18.71 μJ. The full width at half-maximum (FWHM) of laser pulse is nominally 10 ns. As shown in
Figure 1, the emitted laser pulses are split into three beams by the beam splitting cube and the beam splitter, which are the emitted pulse toward target (beam 1), the emitted pulse as start signal (beam 2) and the trigger pulse (beam 3). The laser beam reflected from the targets is gathered by the assembled lens with a diameter of 35 mm. Then the collected laser beam is converted into an electrical signal by the photoelectric detector 1. This electrical signal is fed to the ranging and controlling unit as stop signal. Beam 2 is detected by the photoelectric detector 2 after reflection and attenuation. The electrical signal converted from beam 2 is fed to the ranging and controlling unit as start signal. Beam 3 is collected as a trigger for three-dimensional point cloud imaging.
The scanning unit is used to detect targets in three-dimensional directions. A vertical scan is completed by a stepper motor and a horizontal scan is completed by a controllable holder. The ranging and control unit is mainly used to complete the functions of two parts, the time interval measurement and the system control. This paper used Field-Programmable Gate Array (FPGA) to configure parameters of the laser emitter, the stepper motor, AGC and Time-to-Digital Converter (TDC), and eventually receive feedback signals from AGC. Besides, FPGA gathers, processes and uploads data to a computer through USB connector as well.
The main function of the ranging and controlling unit is to measure the time interval between start signal and stop signal, which is proportional to the target distance. This paper applies a TDC chip to measure the time interval because of its high integration and high linearity. A TDC-GP22 is used in the proposed LiDAR system, which is of high precision and the resolution of 45 ps for dual channels (the emitting channel and the receiving channel). Furthermore, in order to reduce the walk error and timing jitter appearing in the returned channel (stop signal), this paper proposes a time-pickoff circuit based on AGC and timing discriminators mainly including CFD to ensure the accurate time interval has high accuracy and precision.
2.2. Design of AGC
Since the pulse amplitude is inversely proportional to the square of the distance and is proportional to the target reflectance, the returned pulse amplitude changes widely in large dynamic range. Before the input pulse is sent into the timing discriminators, its amplitude is stabilized into a fixed range by an AGC [
7].
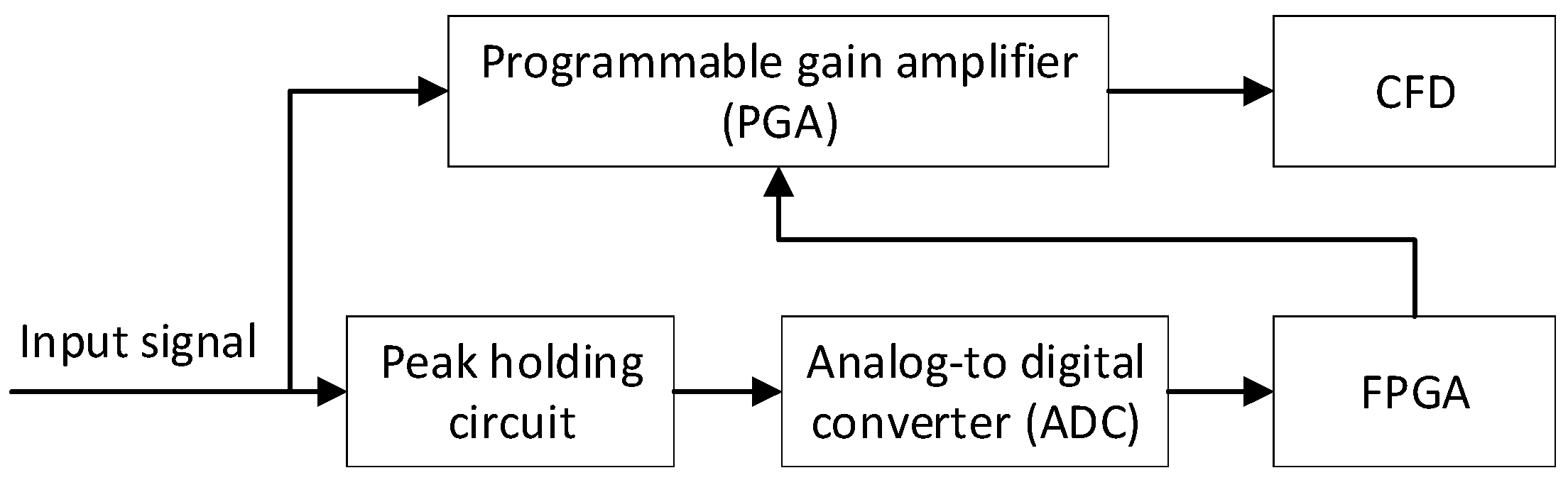
A schematic diagram of the AGC is shown in
Figure 2. The input pulse is divided into two paths. One is transmitted to the peak holding circuit, which is sampled by the Analog-to-Digital Converter (ADC), and then the output value of ADC is stored by FPGA. The other is fed to the Programmable Gain Amplitude (PGA), which is controlled by FPGA according to the peak value of the input pulses. The input pulses are divided into several levels according to their amplitudes based on LiDAR equation.
The peak holding circuit is designed to maintain the pulse peak for a period of time (more than 1 μs) for readily sampling the input pulse by using ADC. OPA615, a holding capacitor (30 pF) and a Schottky diode (BAT17) are used to complete peak holding, which has a great advantage in transconductance peak holding. ADC is utilized to detect and sample the output of the peak holding circuit. In order to satisfy the repetition frequency of the laser (5 kHz), ADS7884 is selected to sample the output of the peak holding circuit which has a sampling rate of 3 MHz. The selection of the PGA depends on the range of the returned pulse amplitude, which need to be calculated as follows. PGA870, which has a dynamic gain in the range of −11.5~20 dB, is selected as the PGA in the AGC system. Here, ADS7884 and PGA870 are able to be programmable controlled by FPGA.
According to the LiDAR equation, the dynamic ranges of peak power of the returned pulse are calculated into a fixed range. Assuming that the detected distance covers from 10 m to 100 m, the peak power of the returned pulse can be written as:
where
and
represent peak power of the emitted and returned pulse (W), respectively,
is transmission factor the optical system,
is the reflectance of the target,
is the receiver area (m
2),
is the scattering angle of targets,
is the target range (m) and
represents the two-way atmospheric transmission.
The target is assumed to be Lambertian, thus
is considered as π. Here,
is usually varied from 0.2 to 0.8 [
18].
is equal to a circle area with a diameter of 35 mm in the lab-build LiDAR system.
primarily refers to the transmittance and reflectance of the beam-splitter cubes and the reflecting mirror, which are optical devices of the LiDAR. Therefore,
is calculated as:
where
is reflectance of the beam-splitter cubes (0.99),
and
are the reflectance of the reflector 3 and the reflector 1 (0.9, 0.9), as shown in
Figure 1. The shape of the emitted pulse satisfies Gaussian distribution in time domain, so the peak power of the emitted pulse is:
where
represents energy per emitted pulse (J) and
represents the width of the received pulse (s). The typical
is approximately 0.98. Combining Equations (1) and (3), we rewrote Equation (1) in the following form:
According to Equation (4), if the target range is in the scope from 10 m to 100 m, the corresponding peak power of the returned pulse can be calculated to be from 3.6 × 10
−3 W to 9.0 × 10
−6 W (
). The amplitude of photodetector output (
) can be written as:
where
is the unity-gain responsivity of the detector (A/W),
Rf is the feedback resistance in the detected circuit (kΩ). In this system,
A/W and
Rf = 10 kΩ. Combining the equations above, the returned pulse amplitude is in the range from 0.05 V to 3 V, which is the input pulse amplitude of the AGC circuit. The output of AGC circuit is fed to the CFD in the timing discriminator, thus the AGC input should be adjusted to satisfy the input scope of the timing discriminator, which should range from 1 V to 2.5 V. The AGC output can be changed through setting the gain of the PGA in the AGC circuit. As presented in
Table 1, the PGA gain in the AGC circuit is divided into seven levels to concentrate the input pulse amplitude (0.05–3 V) into a limited range (1–1.5 V). Through optimizing the PGA gain in the AGC circuit, the CFD detection performance can be improved.
2.3. Design of Timing Discriminators
A timing discriminator is used to convert the analog electrical pulses into emitter coupled logic (ECL) pulses at the right instant [
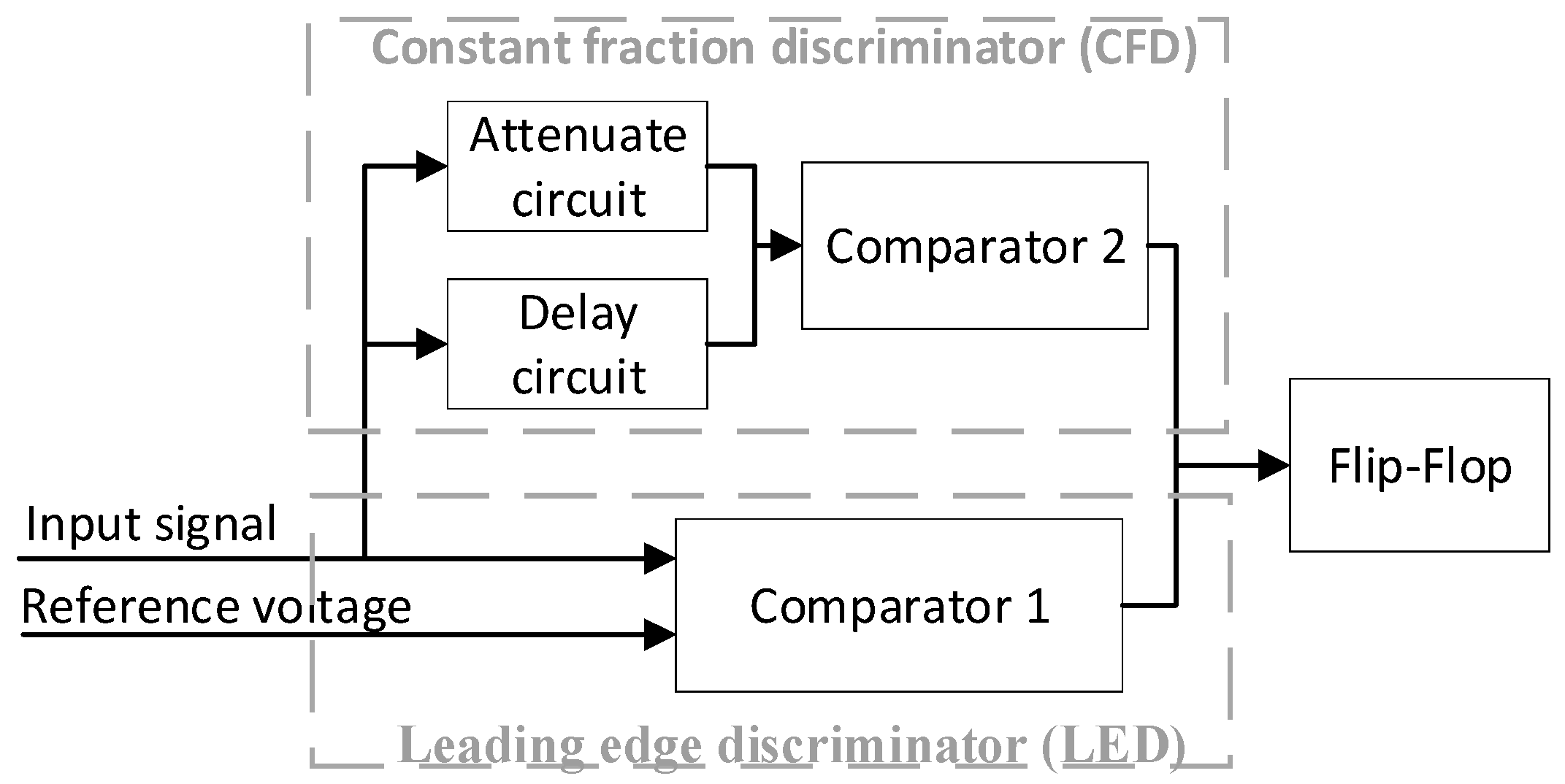
7]. This paper employs a timing discriminator including CFD and leading edge discriminator (LED), as shown in
Figure 3. CFD is designed to reduce for walk error caused by the pulse amplitude and rise time [
5]. LED produces a triggering pulse when the input pulse crosses a constant level, which is a feasible way to avoid false triggers resulting from noise.
The AGC output signal is fed to the delay circuit and the attenuation circuit. When the delayed signal crosses the attenuated signal, a zero-crossing point () is obtained to produce a logic pulse to trigger TDC. The zero-crossing points in the returned pulse are regarded as the returned moment. The measured time interval is calculated from the difference between the emitted moment and the returned moment. Theoretically speaking, the zero-crossing point () is independent from the pulse amplitude.
Two physical parameters, delay time (
) and attenuation fraction (
), are the most significant circuit parameters for the acquisition of the accurate zero-crossing point (
). In several reports, the attenuation fraction (
) was implied to be adjusted in the range from 0.2 to 0.5 [
19], otherwise the range precision may deteriorate significantly. In this paper, the determination of the attenuation fraction and the delay time in CFD circuit were discussed in depth to ensure a high range precision.
3. Methodology
The Cramer−Rao Lower Bound (CRLB) provides a lower limit on the variance of any unbiased estimate of a parameter such as range [
20]. CRLB on range estimate has been derived in previous literature [
9]. Here, it was described briefly for the calculation for CRLB on range estimates in
Section 3.1. In
Section 3.2, the timing jitter as the main random error of the time-pickoff circuit is calculated based on a certain amount of electronic noise. Through the analysis of CRLB and the estimation of the timing jitter, it is obvious that the range precision is closely related to several key parameters, such as pulse amplitude (
), pulse width (
), delay time (
) and attenuation fraction (
). In
Section 3.3, the noise analysis can provide a regular basis for Monte Carlo simulation of range estimation which is elaborated in
Section 3.4. Furthermore, the simulation analysis can provide a way of discussing the relationship between the circuit parameters and pulse parameters and range precision of LiDAR in the next section.
3.1. Cramer–Rao Lower Bound on Range Estimate (CRLB)
CRLB can be used to analyze the range precision, since it provides a lower limit for the variance of range estimates or any other unbiased estimate. The typical laser pulse is modeled as a Gaussian shape, heavy-tailed or truncated parabola, which have been employed in previous researches [
9]. Based on the shape of the laser pulse in the lab-build LiDAR, the truncated parabola model is suited to express the temporal shape of the returned pulse as:
where,
represents the number of photons that are detected in one sample,
refers to the pulse peak amplitude (V),
is the detected range (m),
is the speed of light (m/s),
represents the pulse width (s) (the total pulse width is
, the FWHM is
).
is the bias level of the signal (V),
is the time when the
kth sample is collected (s). The function denoted
is defined as a rectangle function. For further description of the calculation of CRLB readers may refer to the literature [
9,
20].
Since the photon arrival during a sampling interval is assumed as a Poisson process, the noise in LiDAR system is in Poisson distribution. The Poisson probability density function (PDF) can be described as [
9]:
where,
is a Poisson distributed random variable, which refers to the photon arriving at
,
is the photocount realizations, the function
represents the probability of the photocount realizations at time
. Since photon arrival is a Poisson process,
is independent of each other for the random arrival of the photons [
9]. Thus, the progress of total
samples can be described by the log-likelihood function:
where,
is the log-likelihood function associated with the PDF from Equation (7). According to the log-likelihood function of
, the element of the Fisher Information Matrix (FIM)
JRR, which is associated with
, can be deduced as [
9,
20]:
where
represents the sampling frequency. CRLB can be obtained by inverting the FIM
JRR, and the CRLB on the range estimate is the inverse of the FIM element associated with the range [
12]. Therefore, the CRLB aiming at a signal mixed with Poisson noise can be rewritten as:
where the function
represents the minimum variance of the unbiased range estimate of the parabolic pulse with Poisson noise. The CRLB derived by assuming Gaussian noise of equal variance can be derived as the same way of Poisson noise, which is [
9]:
Comparing Equation (10) with Equation (11), the CRLB derived by assuming Poisson noise is always greater than the CRLB derived by assuming Gaussian noise. In this paper, the CRLB of the range estimate is derived by Gaussian noise.
3.2. Timing Jitter
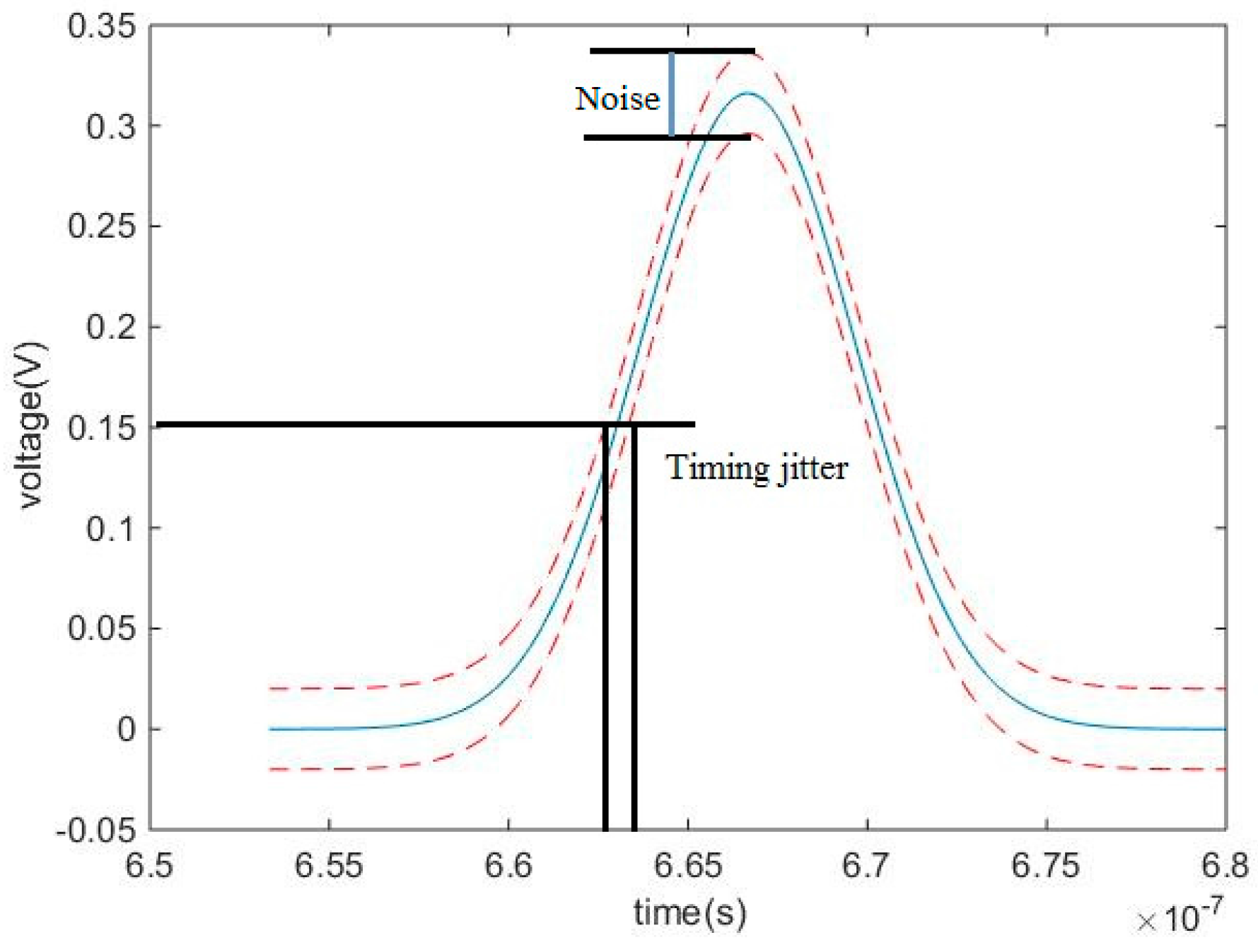
Timing jitter (TJ) is defined as the timing error caused by noise such as statistical fluctuations existing in the shape of the detected pulses, as shown in
Figure 4. The precision of the LiDAR system is mainly determined by timing jitter [
5]. Timing jitter can be used to indicate the high limit of the standard deviation (StD) of the range measurement data. Timing jitter is calculated by the ratio of the root mean square (RMS) of noise to the slope of the returned pulse at the timing moment [
5,
6].
Noise following the returned signal enters into attenuation circuit and delay circuit of CFD. The part of noise entering into the attenuation circuit of CFD is attenuated
k times. The remaining part of the noise entering into the delay circuit is not changed. The RMS of noise is assumed as
, the output noise of comparator
can be written as:
where,
k is the attenuation fraction. As described in
Section 3.1, the laser emitted pulse is modeled as truncated parabola. The tiny bias level
is ignored, so that we can obtain the delayed signal (
) and the attenuated signal (
) as:
The zero-crossing point
is the moment when the delayed signal crosses the attenuated signal. The pulse amplitude in the time of
satisfies:
where
refers as the delay time. According to Equation (15),
can be calculated as:
Combining Equations (13), (14) and (16), the voltage difference between the input terminals of the comparator can be calculated as:
Based on the definition, timing jitter
can be written as:
The ranging deviation resulted from the timing jitter can be calculated as:
Equation (19) shows that the timing jitter is related with the pulse amplitude (), pulse width (), the attenuation fraction () and the delay time ().
3.3. Sources of Noise in a LiDAR System
In order to simulate the noise applied in Monte-Carlo simulation, the noise sources of a LiDAR system, which consist of background noise, photo-diode noise and pre-amplifier circuit noise [
21], are discussed in this section,.
3.3.1. Background Noise
The sources of the background noise are mainly divided into three parts: thermal radiation from self-emitting sources, solar radiation reflected by the background and radiation scattered by the atmosphere [
22]. The solar radiation is far greater than the other two kinds of radiation, so that the background noise is mainly determined by the solar radiation. According to the previous researches [
21], the noise current caused by the solar radiation can be written as:
where
is the spectral radiance of a background source (W·m
−2·sr
−1·μm
−1),
is the solid angles of receiving Field Of View (FOV),
is the FWHM of the neutral-density filter (μm). As described in
Section 2.2, the unity-gain responsivity of the detector
(A/W), the atmosphere transmittance at 1064 nm
and the transmission factor of the optical system
are 0.6, 0.98 and 0.8, respectively.
Assuming that the solar radiation is reflected by the target,
can be calculated by
, where
represents the solar irradiance per steradian (W/m
2·sr·μm).
is approximately 500 W/m
2·μm for perpendicular incident sunlight [
22]. The reflectance
of the background is assumed as 0.4, since the LiDAR system is often used in the city and the material of the background is concrete. According to the datasheet of the applied PIN photodiodes [
23], the bandwidth of the neutral density filter
is 10 × 10
−3 μm.
is described as
, where
is the focal length of objective lens (71 mm) and
is the diameter of the telescope equalling 35 mm. Thus, the noise current
is equal to 2.231 × 10
−4 A.
The RMS of the background noise current is calculated as [
21]:
where,
represents the charge of electron, which is equal to 1.6 × 10
−19 C. The signal bandwidth of the pre-amplifier circuit
(Hz) can be calculated by:
where
Rf and
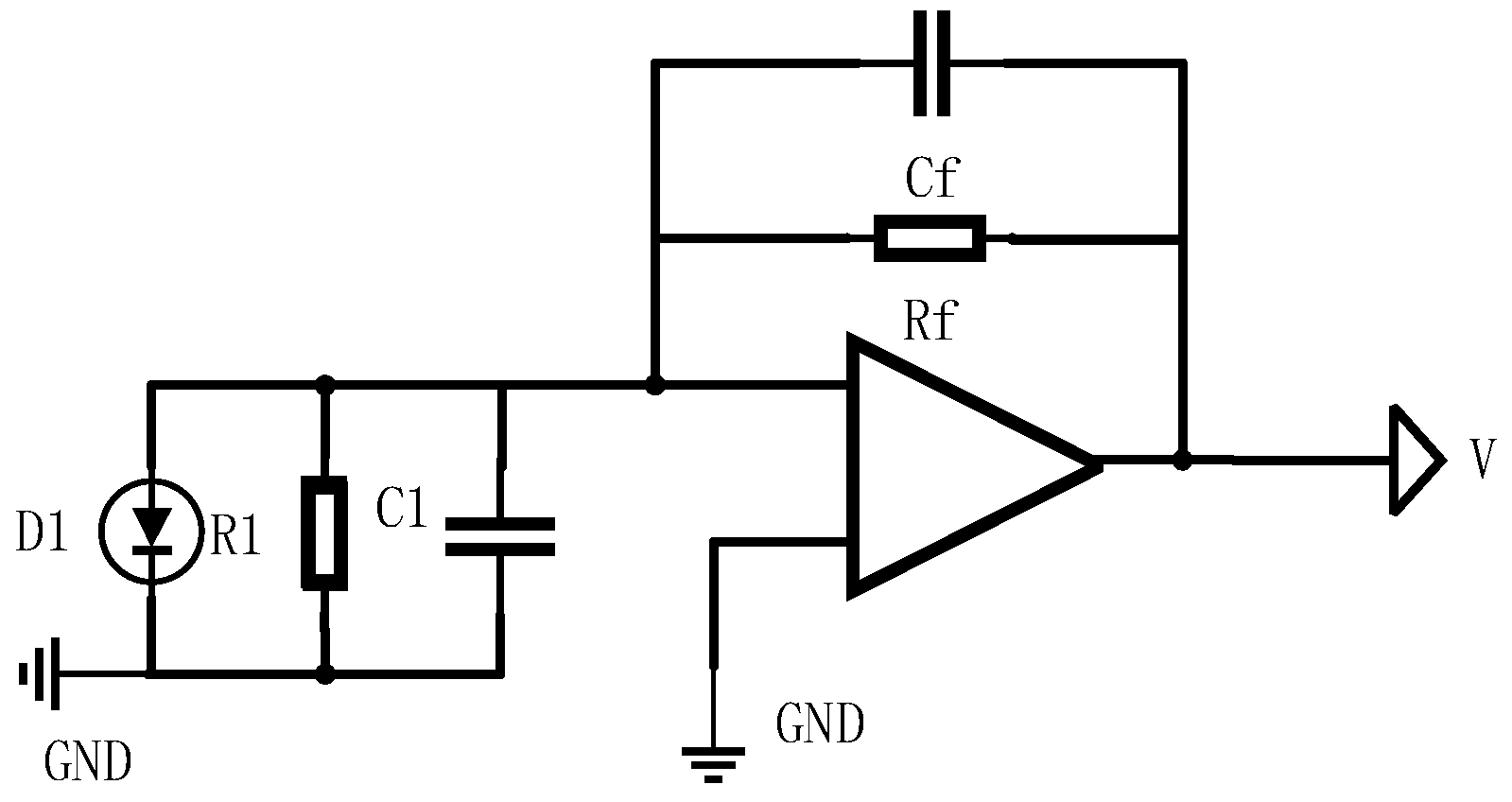
Cf are the feedback resistance and capacitor in the pre-amplifier circuit. The schematic diagram of pre-amplifier circuit is shown in
Figure 5, whose parameters are set as follows:
Rf = 10 kΩ,
Cf = 0.5 pF,
pF,
MΩ. According to the above parameters, the RMS of the background noise current can be rewritten as
A.
According to Equations (21) and (22), the RMS voltage of the background noise
(V) can be calculated by:
3.3.2. Photodiode Noise
The noise caused in photodiodes by dark current and shot noise is usually described by noise equivalent power (NEP) in the datasheet of PIN photodiodes. The RMS of the equivalent current of photodiode noise (A) can be written as:
where
represents the noise equivalent power (
). Based on the datasheet of the PIN photodiode, the typical value of
equals
[
23]. The RMS voltage of photodiode noise
(V) is calculated by:
3.3.3. Pre-Amplifier Circuit Noise
The pre-amplifier circuit noise consists of the voltage noise and the current noise caused by the operational amplifier (OPAMP), and the thermal noise caused by resistance [
24]. Each kind of noise is discussed as follows: firstly, the input voltage noise and the input current noise can be converted to the output RMS voltage as [
24]:
where
,
are the output voltage noise and current noise (V),
represents the noise gain of the pre-amplifier circuit,
is the closed loop bandwidth in the pre-amplifier circuit (Hz).
(
) and
(
), the input voltage noise and current noise of the OPA657, are equal to
and
, which are given as a constant in the datasheet [
25]. The value of
in the pre-amplifier circuit is equal to the signal bandwidth
, which is illustrated in Equation (28) [
24]. The noise gain
NG can be calculated by Equation (29):
where
and
is the parameters in the pre-amplifier circuit, which is shown in
Figure 5. Combining Equations (26)–(29), the output RMS voltage of the voltage noise and the current noise can be written as
V,
V, respectively.
Secondly, as shown in
Figure 5, the thermal noise caused by resistor
Rf and
,
are
(V), described as:
where,
is the signal bandwidth,
is Boltzmann constant, which is equal to
.
represents a temperature in Kelvins, which is assumed as 298.15 K [
24]. The total RMS voltage of thermal noise (V) in the pre-amplifier circuit can be calculated by:
In summary, the RMS voltage of the total output noise is obtained by combining the above individual parts in a root-sum-squares manner, so the RMS voltage of noise (V) in the first operational amplifier of the pre-amplifier circuit is calculated by:
Since another operational amplifier is employed in the pre-amplifier circuit and that the output signal of the pre-amplifier is send to the time-pickoff circuit, the noise following the signal would be amplified by 15 times, which is the product of the gain of the second operational amplifier and the gain of the time-pickoff circuit. Thus, the RMS voltage of the noise in the time-pickoff circuit is approximately V. This estimation value will be used for Monte Carlo simulation of range estimation in the next section.
3.4. Range Standard Deviation in Monte Carlo Simulation
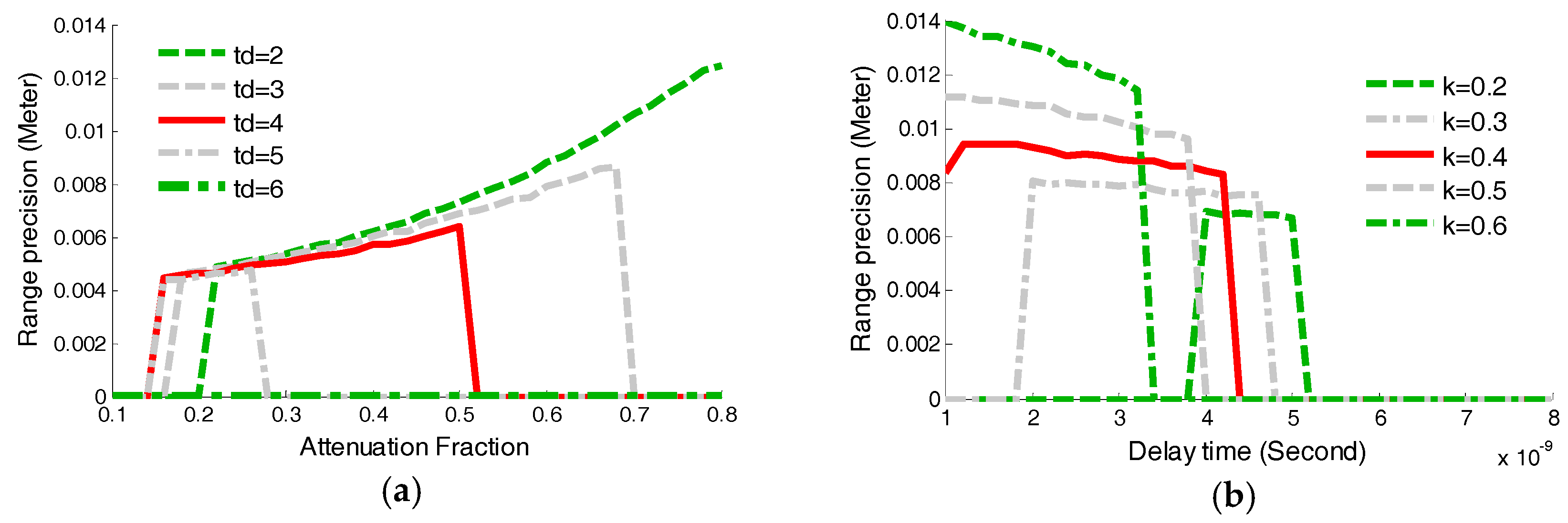
Monte Carlo simulation is a method that uses multiple estimates to achieve all possible solutions, according to the law of large numbers. Thus, it can be used to estimate the performance range of the LiDAR system through analyzing statistically the distribution of the simulated results of range estimate. In this paper, the Monte Carlo simulations employ CFD to estimate the time of the returned pulse, which is proportional to range. The statistical simulated results can be illustrated the influence of pulse amplitude (
), pulse width (
), attenuation fraction (
) and delay time (
) on the range precision. The flow chart of the Monte Carlo simulation appears in
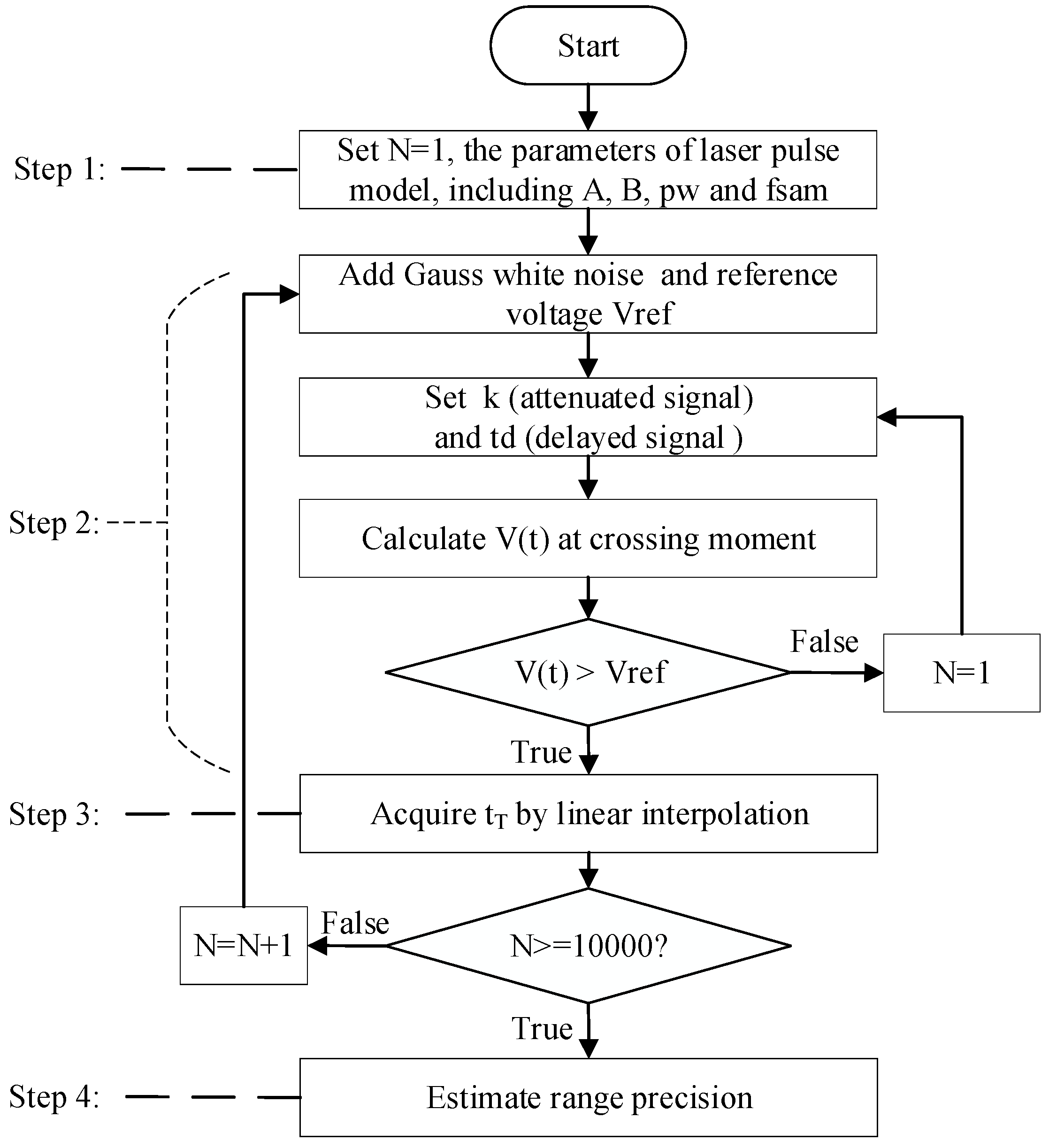
Figure 6. For the effectiveness of Monte Carlo simulation, each simulation is carried out 10,000 times, so as to obtain enough estimate data for the requirements of the Monte Carlo simulation.
At step 1, the emitted laser pulse is modeled as a truncated parabola, whose parameters include the pulse amplitude (
A), pulse width (
), and bias level (B), according to Equation (6). At step 2, the added noise is assumed as white Gaussian noise, whose RMS can be calculated using Equation (33) in
Section 3.3. The reference voltage
is used to avoid false triggers caused by the noise, whose value is 0.07 V. The sampling frequency is set as 100 GHz. The noisy signal is divided into two paths, one of which is attenuated by
times and the other is delayed by time
. If the delayed signal crosses the attenuated signal, the signal amplitude at the moment of crossing are denoted as
V(
t). According to the operation principle of the time discriminators, the zero-crossing point
can be acquired only when
V(
f) is greater than the reference voltage
Vref of LED. In the case that
Vref did not reach the amplitude threshold, we need to reset the circuit parameters including the attenuation fraction
and the delay time
. If
, a rough calculation of the zero-crossing point can be obtained. In order to calculate the zero-crossing point accurately, linear interpolation is implemented for obtaining the accurate
at step 3. The average and StD of the ranging data would be estimated at step 4, which can illustrate the range precision.
5. Experiment and Results
In order to verify the relationship between the range precision and the key parameters in the pulse and time-pickoff circuit, main three key parameters are adjusted to verify the range precision, including the pulse amplitude (), attenuation fraction () and delay time ().
The pulse width
is nominally 7 ns. In this section, the StD of experiment results for pulse amplitude
(attenuation fraction
and delay time
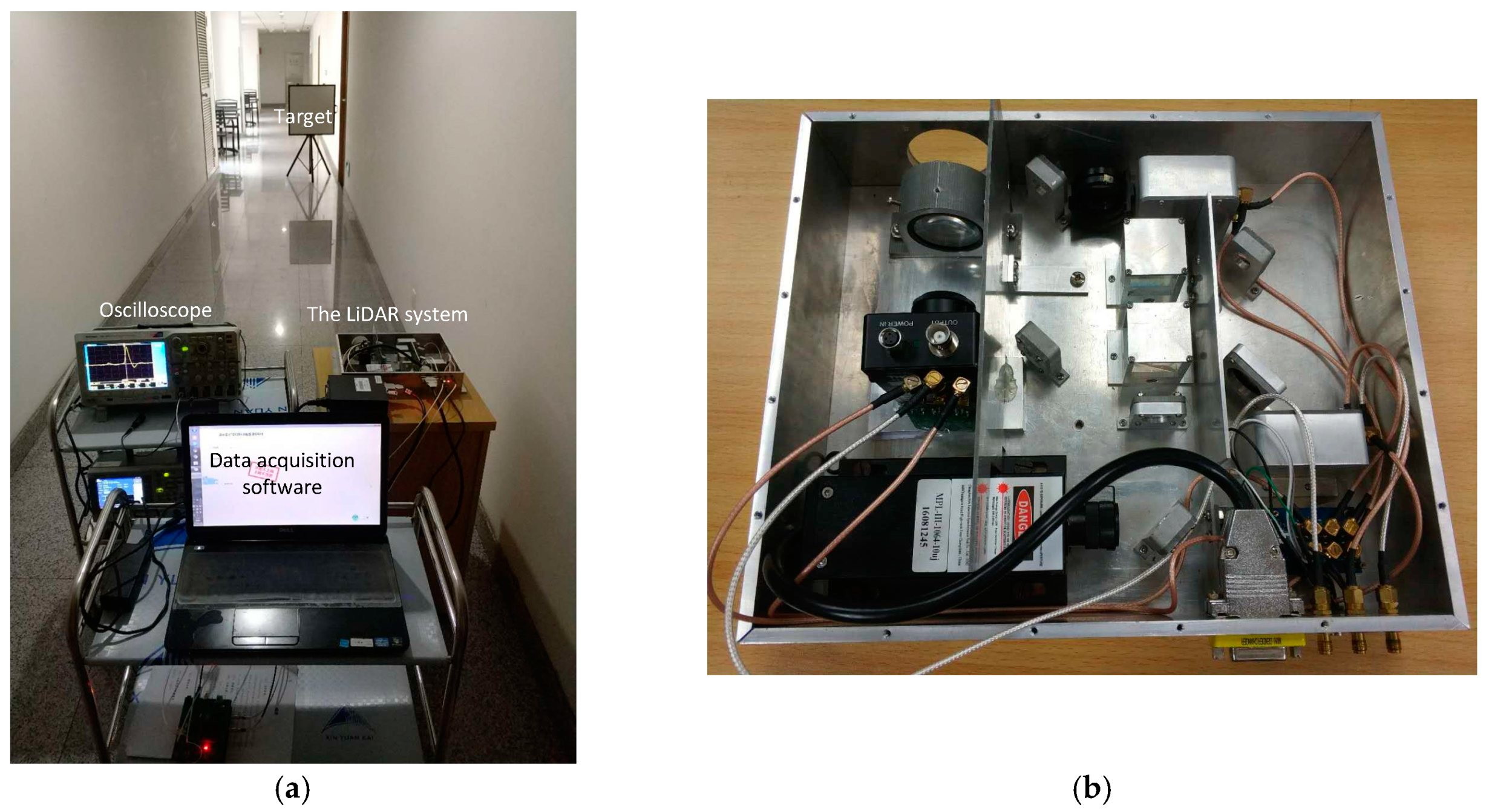
) is called AEstd (KEstd, DEstd) for short. The definitions of ASstd, KSstd and DSstd used in experiments are same as those in the simulations. The experimental scene is displayed in
Figure 11, where the acquisition software and oscilloscope are used to gather the measurement data.The oscilloscope can get the sampled data of the attenuated signal and delayed signal in time-pickoff circuit. The LiDAR system is utilized to measure the range from the target and the sensor. The reference value of the range measurement was detected by BH-AD41, a laser range finder with a high resolution of 0.1 millimeter. The BH-AD41 employs a laser pulse at 650 nm, whose divergence angle is 0.6 m rad. The nominal precision of the range finder is 2 mm, but it only can detect cooperative targets when the target distance is beyond 100 m.
5.1. Experiment Results for Pulse Amplitude (A)
In order to study how the pulse amplitude effects the range precision, the attenuation fraction (
) and the delay time (
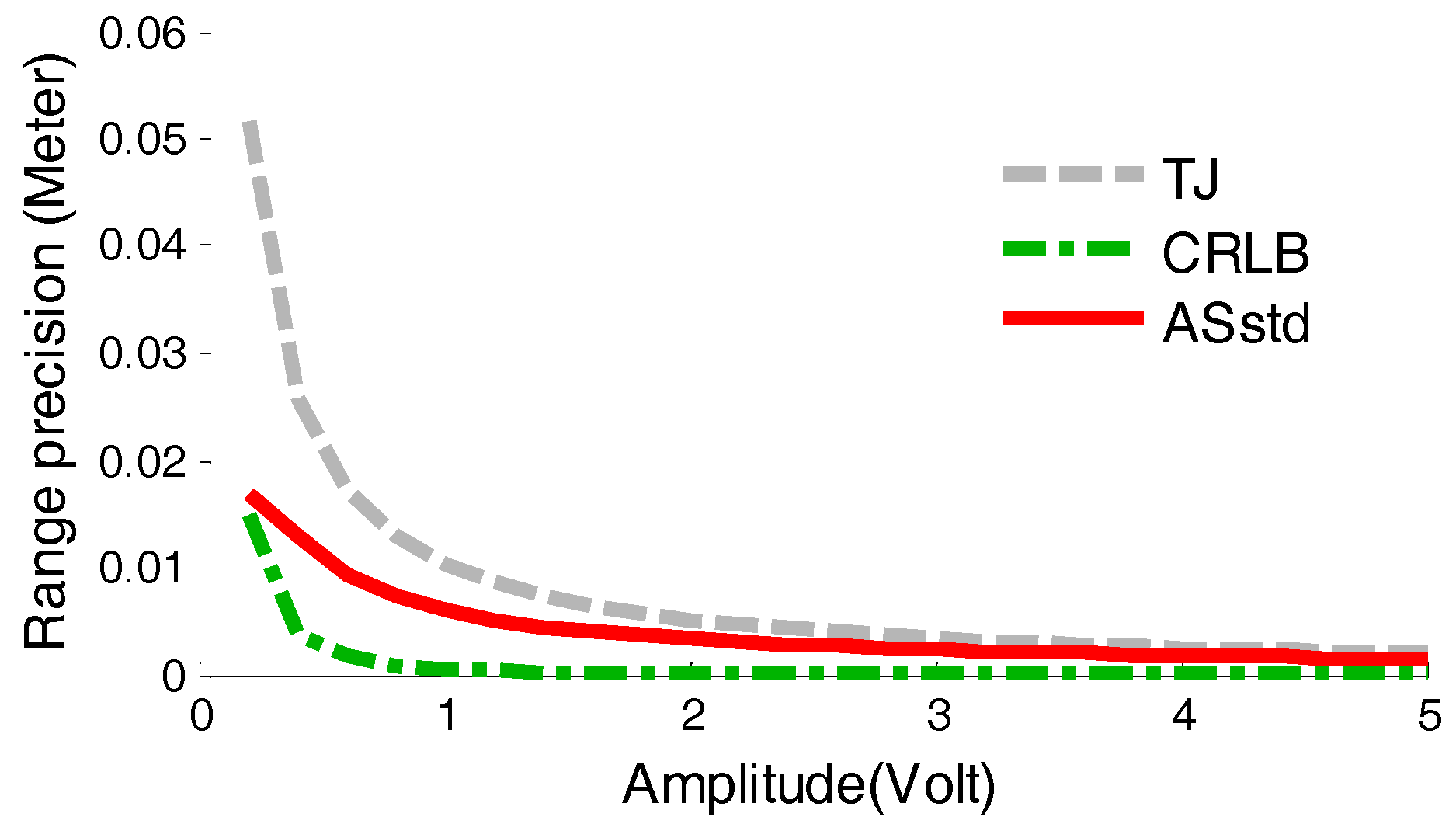
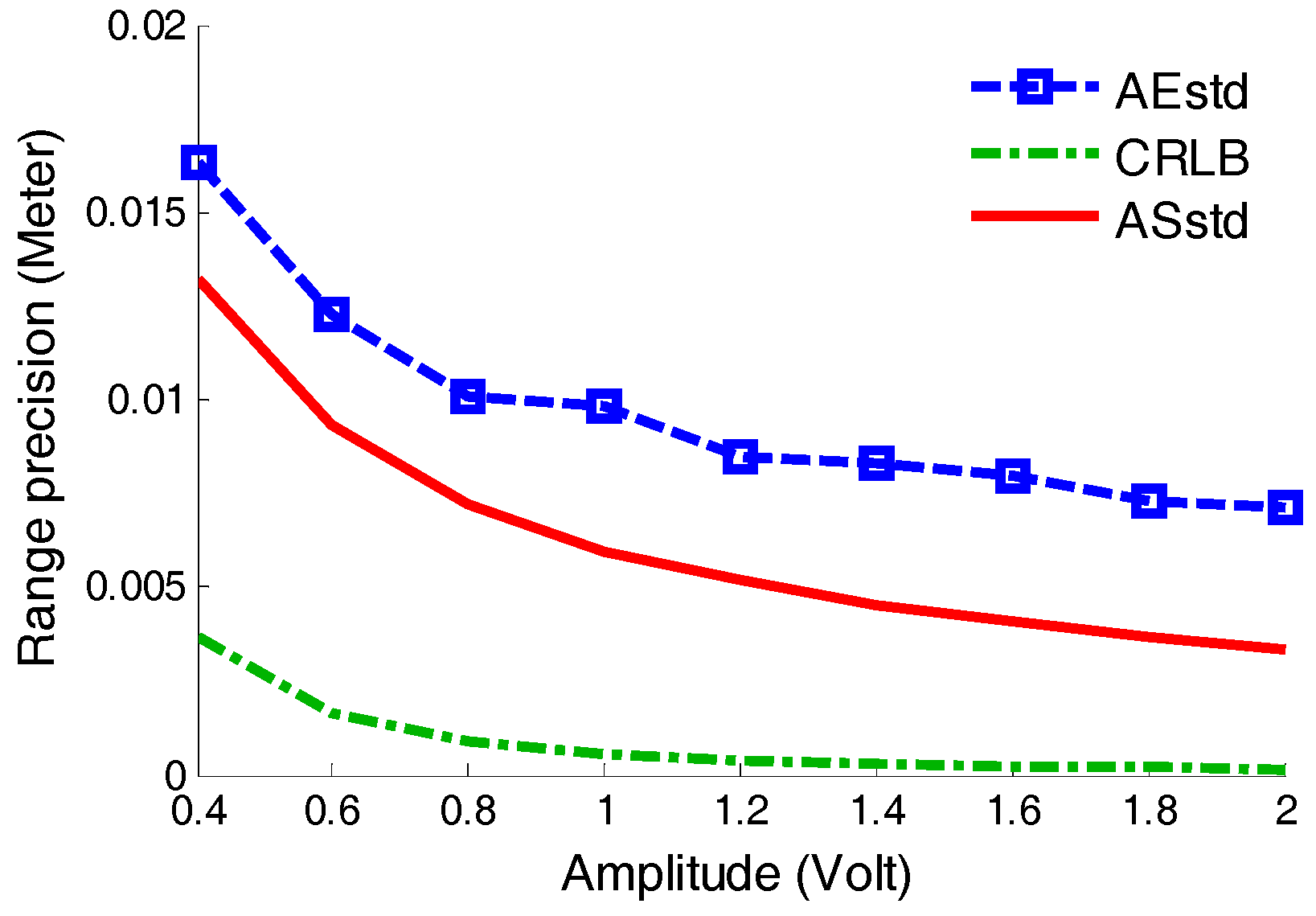
) in the time pick-off circuit were at fixed values of 0.4 and 4 ns, respectively. Standard diffuse reflectors with reflectivities of 20%, 40%, 60% and 70% were used as targets. Through changing the detected range and the reflectors, nine groups of experiments data can be gathered from the different returned pulse amplitudes. The returned pulse amplitudes were changed from 0.2 V to 2 V with an increase step of 0.2 V. In each group of experiments, 100,000 datapoints were utilized for calculating the range accuracy and precision. The experimental results were compared with the simulation results and CRLB under the same conditions, as shown in
Figure 12.
From
Figure 12, two conclusions can be obtained as follows. Firstly, AEstd values decrease with the increase of the pulse amplitude
A. They are greater than the values of ASstd, mostly because the actual noise brought more error into the range measurement. Secondly, the same as the CRLB estimation, AEstd values have a low limiting effect on the range precision when the pulse amplitude is greater than 1.2 V.
5.2. Experiment Results for Attenuation Fraction (k) and Delay Time (td)
A series of experiments were established to verify the influence on the range precision on
and
in the time pick-off circuit. In the experiments, the returned pulse amplitudes were assigned to be in one of three groups of 0.4 V, 0.8 V and 1.2 V, respectively. Every group has six subgroups according to the different attenuation fractions
, which were varied from 0.2 to 0.7 by changing the resistance value of the attenuation circuit. In each subgroup,
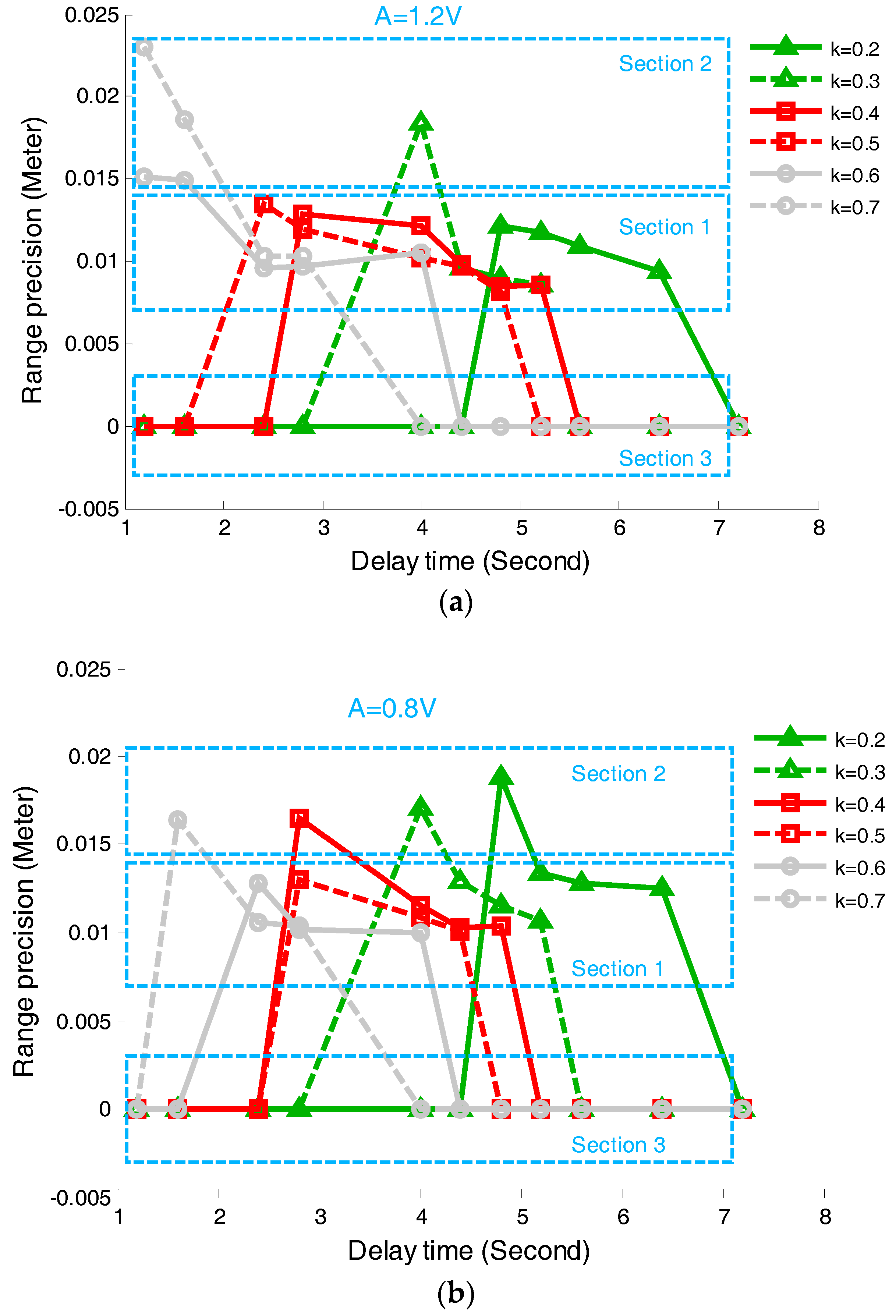
was adjusted to be 1.2, 1.6, 2.4, 2.8, 4.0, 4.4, 4.8, 5.2, 5.6, 6.4, and 7.2 (ns), respectively, mainly through changing the length of the delayed line in the time pick-off circuit. The experimental results are plotted in
Figure 13, where
Figure 13a,b illustrate the variance of DEstd varied with the increase of
under the condition of
and
, respectively.
In
Figure 13, DEstd values were divided into three sections: the correct solutions section (
Section 1), the terrible solutions section (
Section 2), and the no solutions section (
Section 3). Based on the results, the following three conclusions can be draw: firstly,
in the time-pickoff circuit should be determined within the range selected in
Section 1, such as 2.80 ns~5.20 ns for
(red square solid line), and the range precisions for the selected delay time in this scope are almost the same. Secondly,
in the time-pickoff circuit should be selected depending on the width of the range selected in
Section 1. This is because the width of the selected-range reduces with the decrease of the returned pulse amplitudes (
A). Generally speaking, the parameter values of
are selected within 0.4–0.5 for the best results. Thirdly, compared with the simulation results as shown in
Figure 9b, the beginning and ending locations of the range selected in
Section 1 as shown in
Figure 13 are falling behind the locations of the range selected in
Figure 9. This is because a higher reference voltage (150 mV) in the LED was set up to avoid random noise in the experiments, so that the correct zero-crossing point
is generated by using the larger
. Besides, the actual pulse width would be expanded by the delay lines up to be 9 ns, so that the selected-range of
is located at a larger
than in the simulation results.
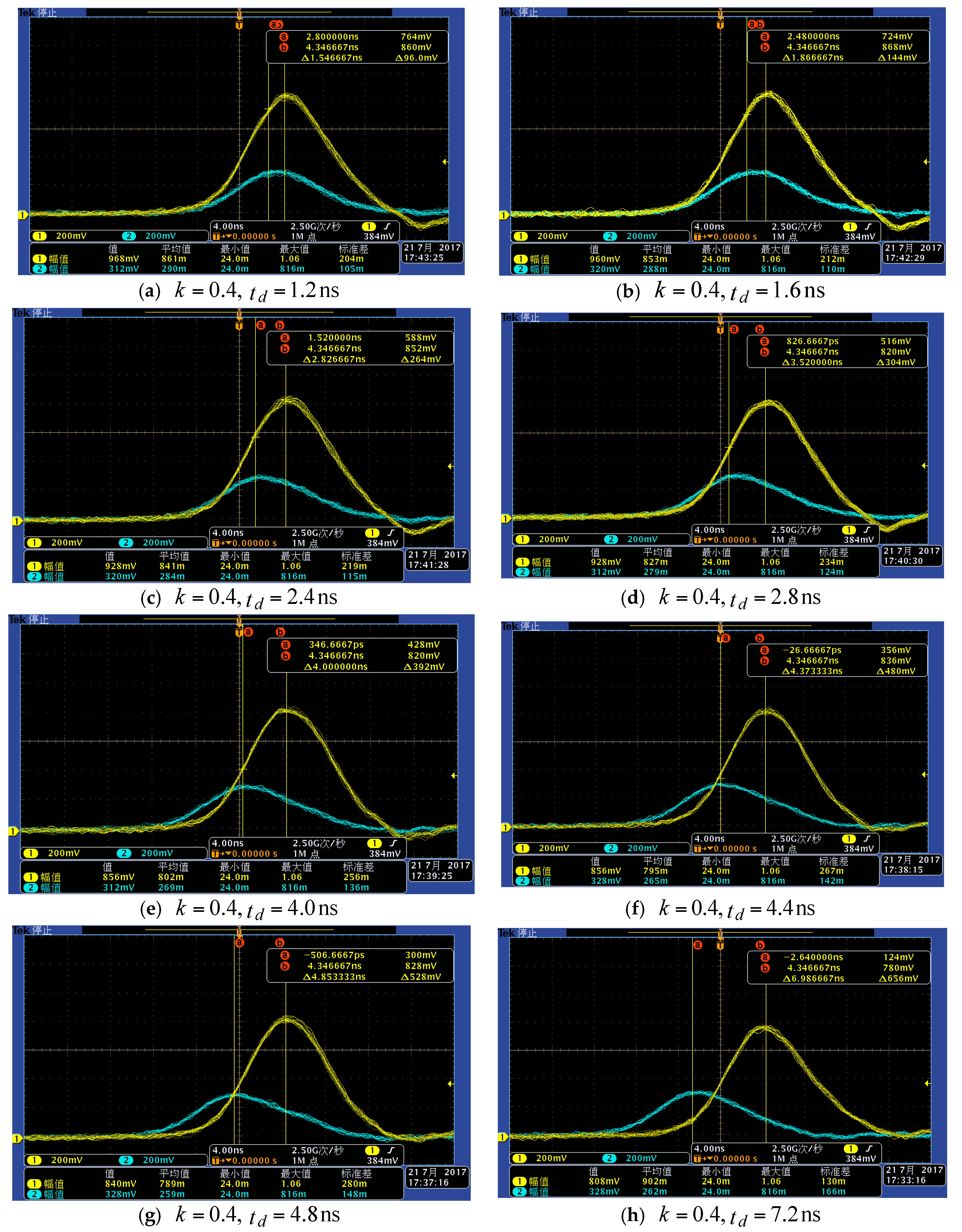
5.3. Selection Criterion of Attenuation Fraction k and Delay Time td
In order to discuss intuitively the range precision influence of
and
, the attenuated signal and the delayed signal in the time-pickoff circuit were sampled by an oscilloscope with a 2.5 G sampling rate. For example, the returned pulse under the condition of
and
are shown in
Figure 14, where there are four kinds of situations for the zero-crossing point
, including
nonexistence (
Figure 14a,b),
existing in noise (
Figure 14c),
on the rise edge (
Figure 14d–f), and
on trailing edge (
Figure 14g,h). Three groups of data (amplitude equal to 0.4 V, 0.8 V and 1.2 V) for different attenuation fractions
and delay times
were obtained, as shown in
Figure 14. Therefore, four kinds of results will be discussed by combining
Figure 14 and
Figure 15.
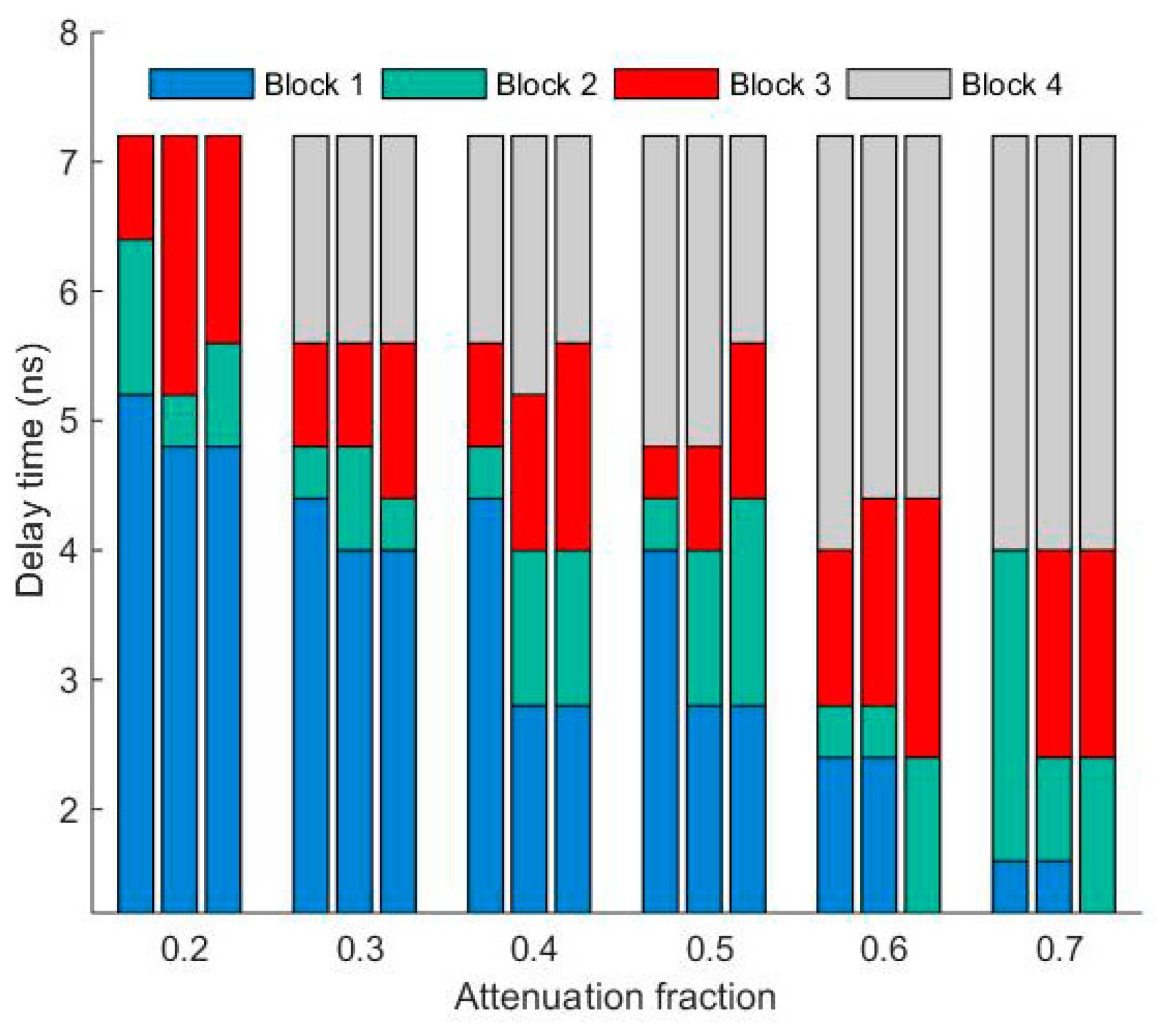
In
Figure 15, Block 1 represents the area of no solution, where the zero-crossing point
cannot be obtained when the delayed signal and the attenuated signal have no crossing point, as shown in
Figure 14a,b. Block 2 represents the terrible solution area. This is because the moment of
was fluctuating up and down the reference voltage level with noise so that the range precision is beyond the selected-range, as shown in
Figure 14c. Block 3 represents the area of usable solutions. The moment of
occurs at the rise edge of the attenuated signal and exceeds the level of
, as shown in
Figure 14d,f. Block 4 represents the area of solution on the trailing edge. Here
is obtained at the trailing edge of the attenuated signal, as shown in
Figure 14g,h. According to the definition of CFD, the
values of Block 1 and Block 4 cannot be selected to be employed in the time-pickoff circuit.
From
Figure 15, two conclusions can be clearly stated as follows: firstly,
adjusted from 0.2 to 0.6 can be applied in the time-pickoff circuit for ranging measurements, which is shown in block 3 (red area) in
Figure 15, because when
is beyond the range of 0.2~0.6, the ranging precision deteriorates. This choice criterion also can be deduced from the simulation results as shown in
Figure 9. Secondly, the optimal
and
should be selected according to the range performance of the minimum pulse amplitude, such as the left one of the three bars in each group data in
Figure 15.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}