A New Low Complexity Angle of Arrival Algorithm for 1D and 2D Direction Estimation in MIMO Smart Antenna Systems

 , ,
, ,  and
and
Abstract
:1. Introduction
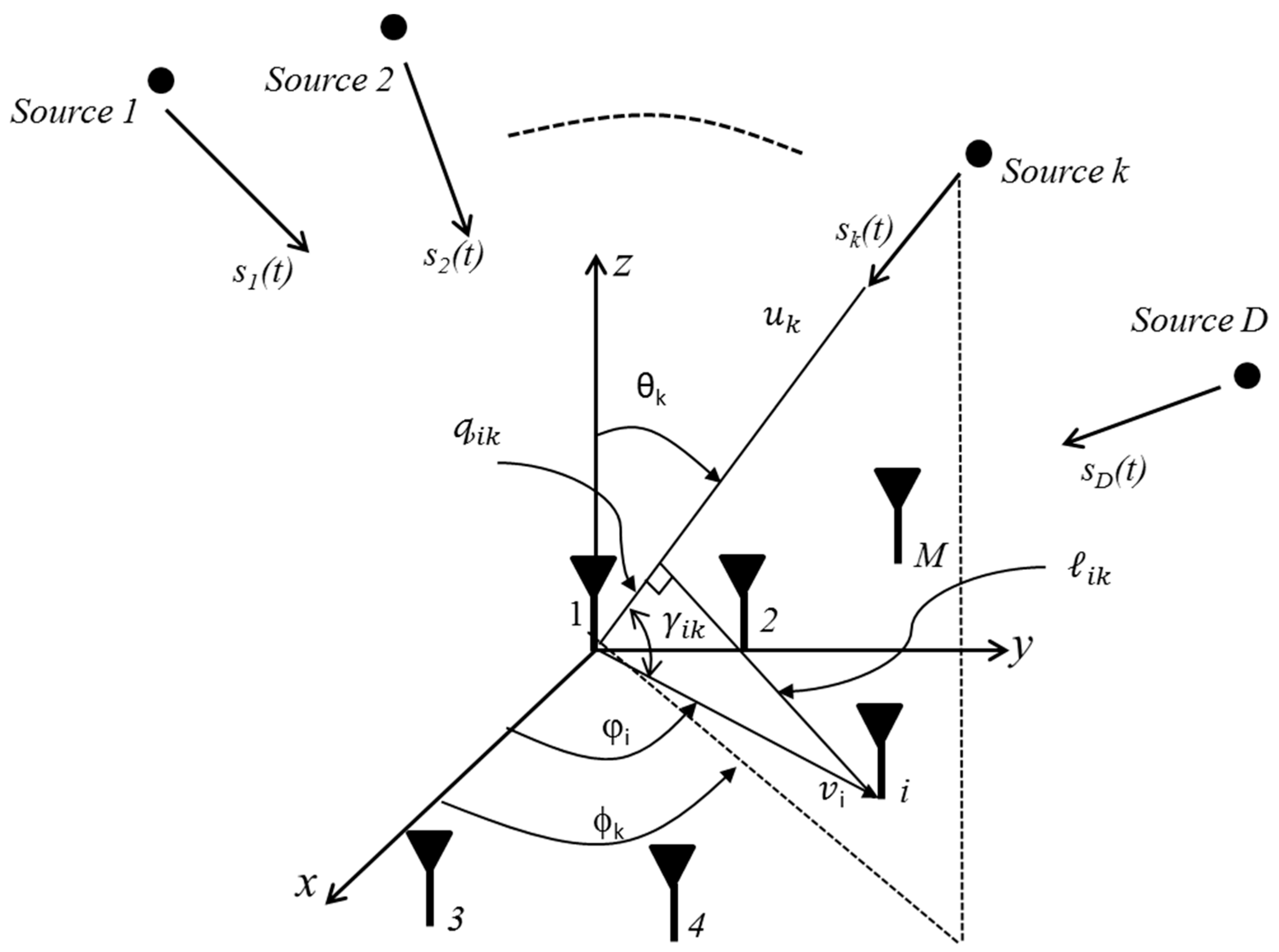
2. Array Signal Model
3. Proposed Algorithm
| Algorithm 1: Propagator Direct Data Acquisition (PDDA) for 1D and 2D Direction Estimation |
| Input: the received signals , with M sensors, N number of snapshots, D source signals. Output: The estimated AOAs. Step 1: Compute the received signal and add noise with a certain SNR () Step 2: Divide the received signal matrix into two portions as given in Equations (17) and (18) Step 3: Construct the propagator vector () by applying Equation (19). Step 4: Compute the vector () by using Equation (20). Step 5: Construct the pseudospectrum of the proposed method by scanning through the whole scanning range of the θ plane with a specific scanning Step , , thus: for ii = 0::θ end If this method is applied for a circular array, the vector needs to be scanned over both the θ and planes with as follows: for ii = 0::θ for jj = 0:: end end Step 6: Find the maximum global point in the spatial spectrum (i.e., ). Step 7: Subtract the maximum value from the other values by applying Equation (23). Step 8: Plot the pseudo-spectrum of the PDDA by using Equation (24) and set . Step 9: Find the locations of the peaks to detect the arrival angles. |
4. Numerical Simulations and Discussion
4.1. Uniform Linear Array (ULA)
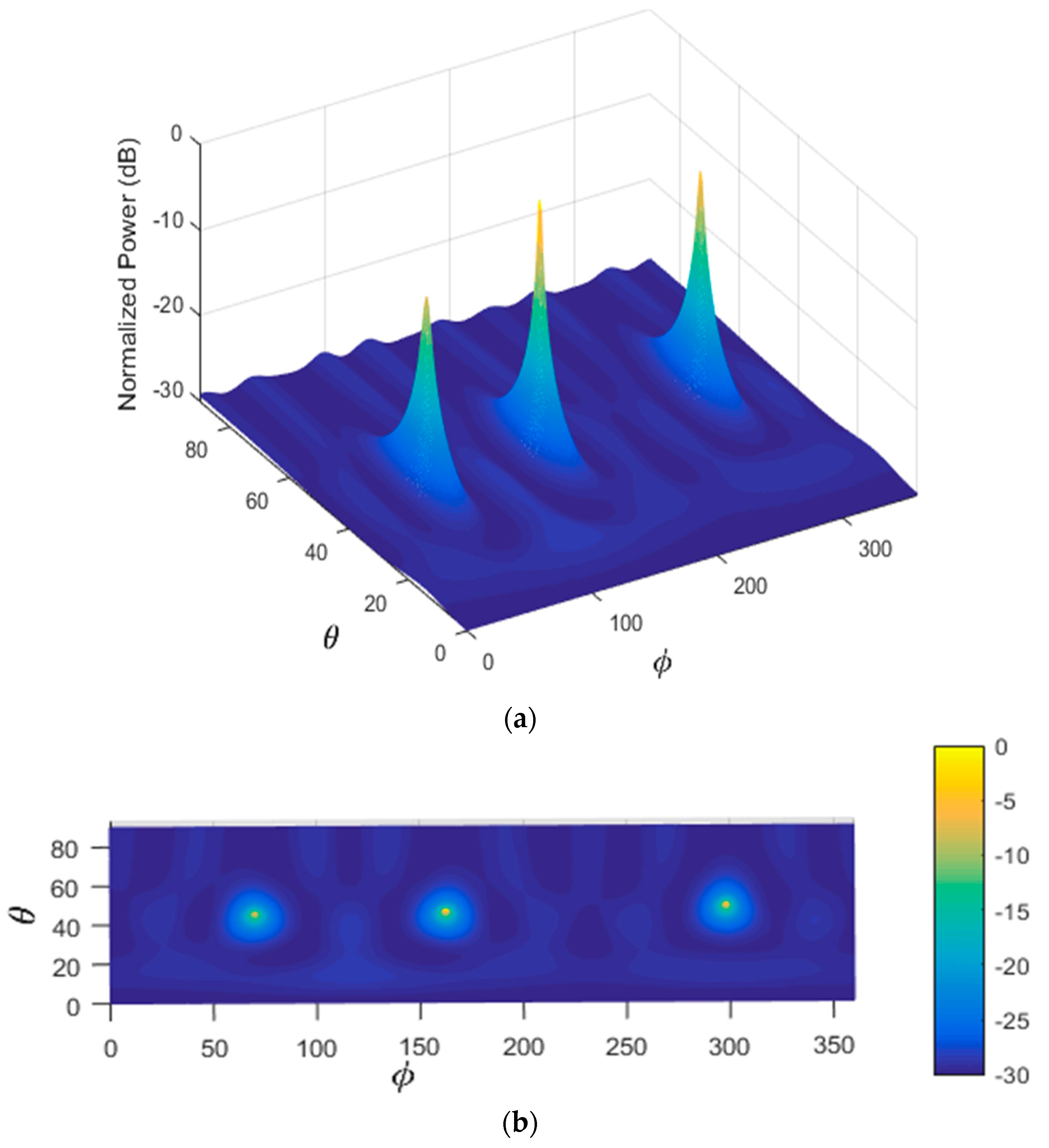
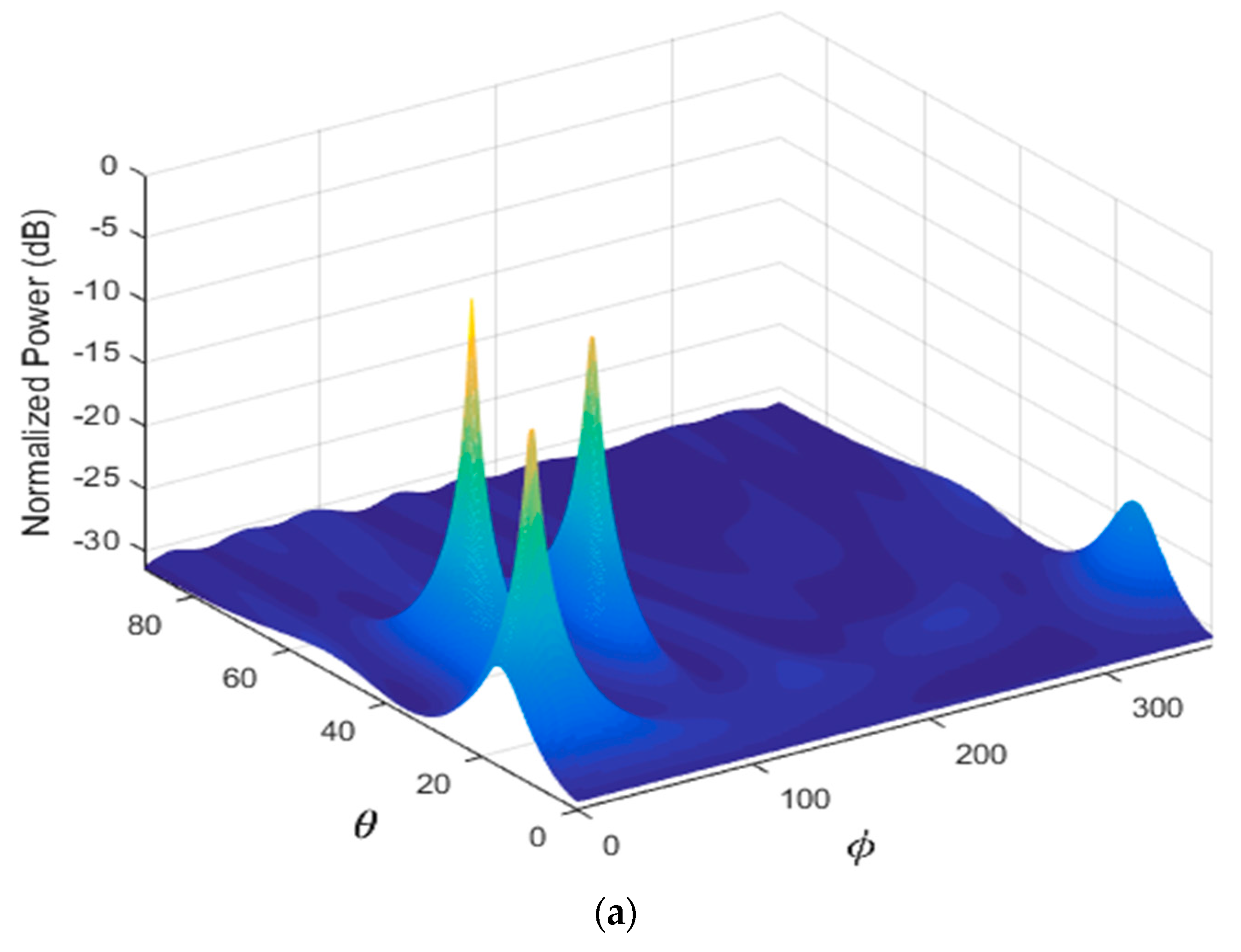
4.2. Uniform Circular Array (UCA)
4.3. Comparison with Other AOA Methods
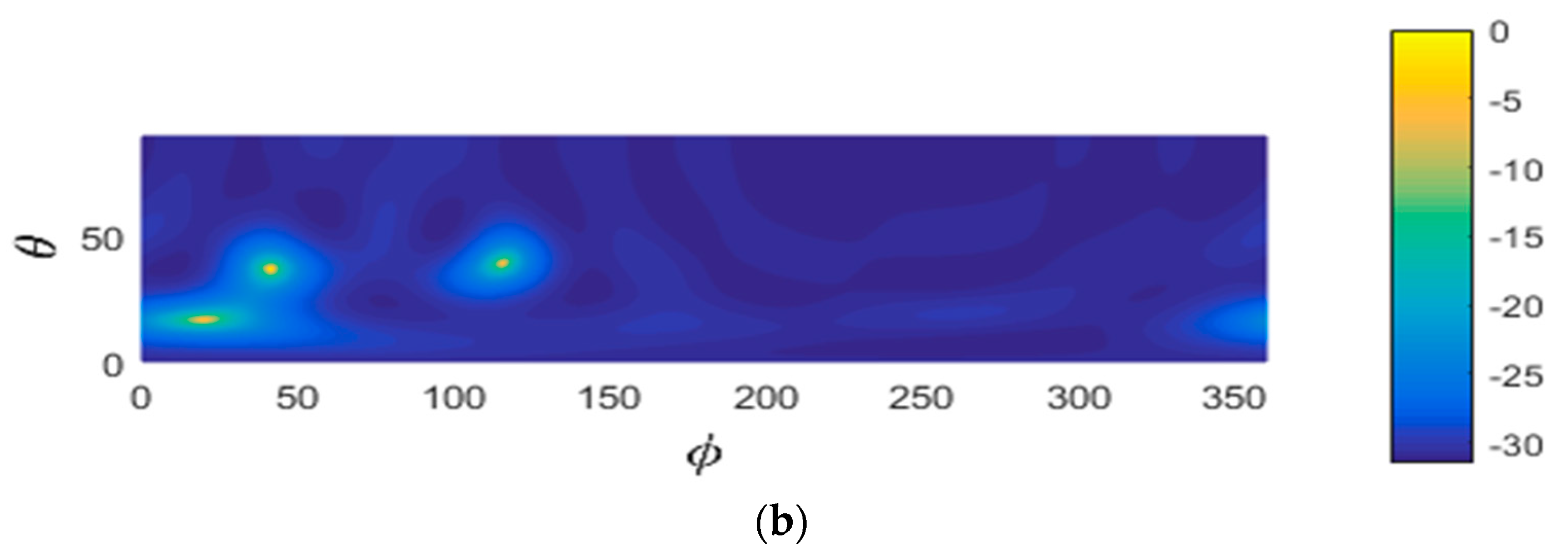
4.3.1. Number of Snapshots
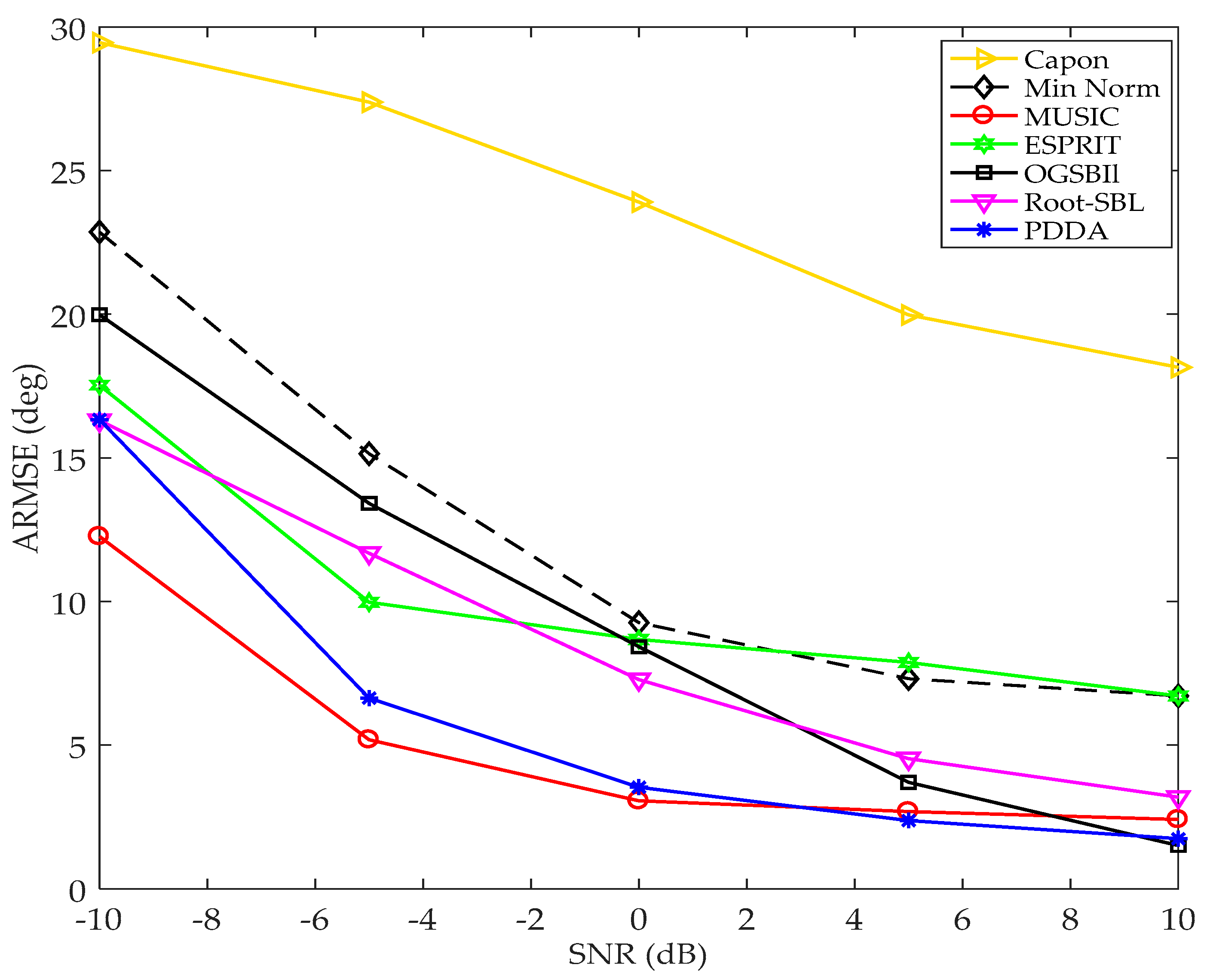
4.3.2. Array-Signal to-Noise (SNR)
4.3.3. Correlation
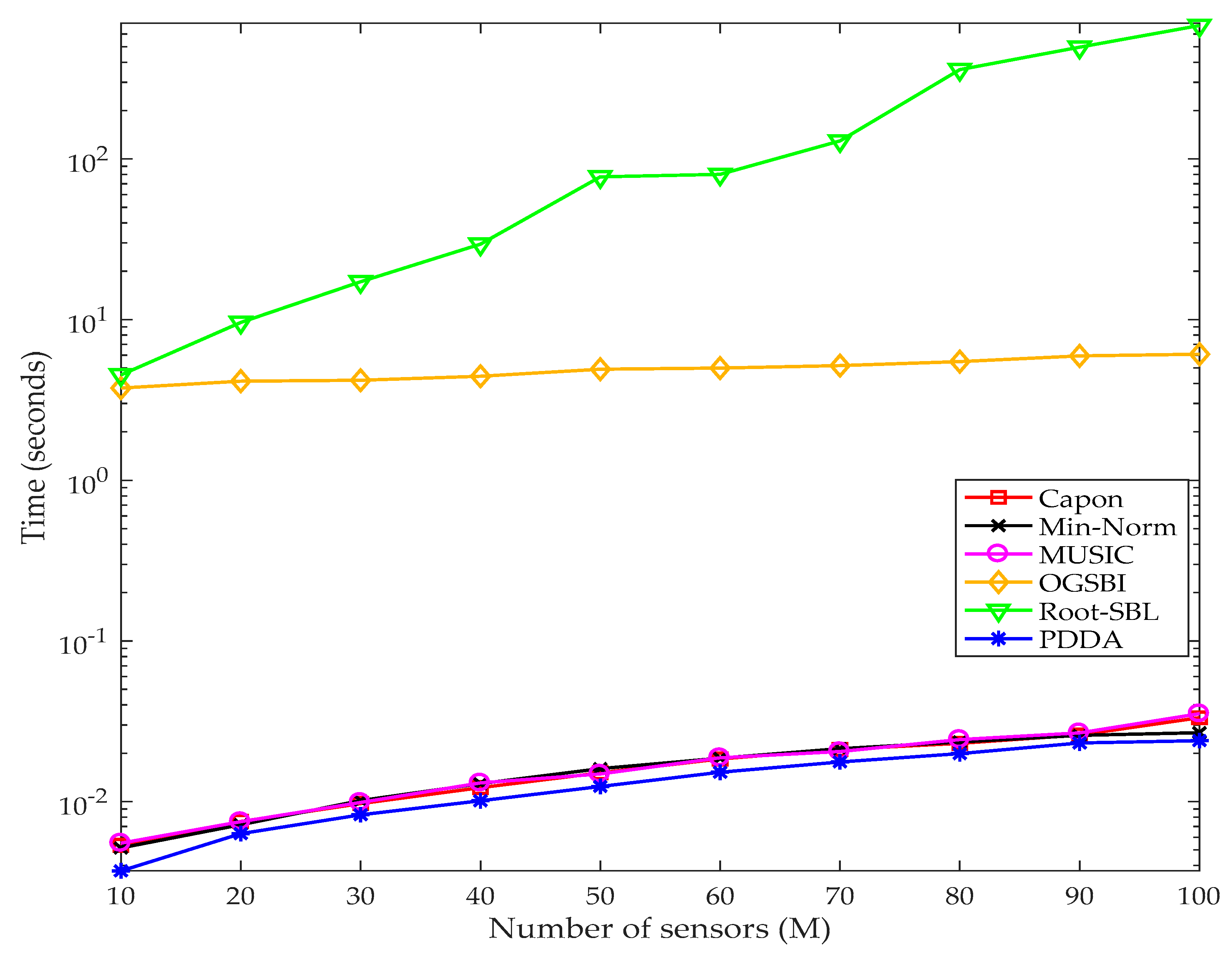
4.3.4. Execution Time
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cremer, M.; Dettmar, U.; Hudasch, C.; Kronberger, R.; Lerche, R.; Pervez, A. Localization of Passive UHF RFID Tags Using the AoAct Transmitter Beamforming Technique. IEEE Sens. J. 2016, 16, 1762–1771. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Shu, L.; Chan, S.; Zhu, T. The application of doa estimation approach in patient tracking systems with high patient density. IEEE Trans. Ind. Inf. 2016, 12, 2353–2364. [Google Scholar] [CrossRef]
- Guo, F.; Liu, H.; Huang, J.; Zhang, X.; Zu, X.; Li, B.; Yuan, X. Design of a direction-of-arrival estimation method used for an automatic bearing tracking system. Sensors 2016, 16, 1145. [Google Scholar] [CrossRef] [PubMed]
- Al-Sadoon, M.A.; Abdullah, A.S.; Ali, R.S.; Al-Abdullah, A.S.; Abd-Alhameed, R.A.; Jones, S.M.; Noras, J.M. New and Less Complex Approach to Estimate Angles of Arrival. In International Conference on Wireless and Satellite Systems; Springer: Cham, Switzerland, 2016; pp. 18–27. [Google Scholar]
- Shi, H.; Leng, W.; Guan, Z.; Jin, T. Two Novel Two-Stage Direction of Arrival Estimation Algorithms for Two-Dimensional Mixed Noncircular and Circular Sources. Sensors 2017, 17, 1433. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Zhou, W.; Juwono, F.H. Joint Smoothed l0-Norm DOA Estimation Algorithm for Multiple Measurement Vectors in MIMO Radar. Sensors 2017, 17, 1068. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.; Gao, B.; Chen, L.; Lan, P. A Low-Complexity ESPRIT-Based DOA Estimation Method for Co-Prime Linear Arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef] [PubMed]
- Federal Communications Commission. Available online: http://www.fcc.gov/e911/ (accessed on 20 February 2017).
- Nemai Chandra, K. Direction of Arrival Estimation Based on a SinglePort Smart Antenna for RFID Applications. In Handbook of Smart Antennas for RFID Systems; Wiley-IEEE Press: Somerset, NJ, USA, 2010; pp. 317–340. [Google Scholar]
- Larsson, E.G.; Edfors, O.; Tufvesson, F.; Marzetta, T.L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 2014, 52, 186–195. [Google Scholar] [CrossRef]
- Rusek, F.; Persson, D.; Lau, B.K.; Larsson, E.G.; Marzetta, T.L.; Edfors, O.; Tufvesson, F. Scaling up MIMO: Opportunities and challenges with very large arrays. IEEE Signal Process. Mag. 2013, 30, 40–60. [Google Scholar] [CrossRef]
- Chang, D.-C.; Hu, C.-N. Smart antennas for advanced communication systems. In Proceedings of the IEEE100.7; IEEE: New York, NY, USA, 2012; pp. 2233–2249. [Google Scholar]
- Al-Sadoon, M.; Abd-Alhameed, R.A.; Elfergani, I.; Noras, J.; Rodriguez, J.; Jones, S. Weight Optimization for Adaptive Antenna Arrays Using LMS and SMI Algorithms. WSEAS Trans. Commun. 2016, 15, 206–214. [Google Scholar]
- Wang, J.; Sheng, W.-X.; Han, Y.-B.; Ma, X.-F. Adaptive beamforming with compressed sensing for sparse receiving array. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 823–833. [Google Scholar] [CrossRef]
- Ghali, M.A.; Abdullah, A.S.; Mustafa, F.M. Adaptive beamforming with position and velocity estimation for mobile station in smart antenna system. In Proceedings of the 7th International Conference on Networked Computing and Advanced Information Management, Gyeongju, Korea, 21–23 June 2011; pp. 67–72. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. In Proceedings of the IEEE 57.8; IEEE: New York, NY, USA, 1969; pp. 1408–1418. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Reddi, S.S. Multiple Source Location-A Digital Approach. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 95–105. [Google Scholar] [CrossRef]
- Kumaresan, R.; Tufts, D.W. Estimating the Angles of Arrival of Multiple Plane Waves. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 134–139. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-Estimation of Signal Parameters via Rotational Invariance Techniques. IEEE Trans. ASSP 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Lin, B.; Liu, J.; Xie, M.; Zhu, J. Sparse signal recovery for direction-of-arrival estimation based on source signal subspace. J. Appl. Math. 2014, 2014, 530413. [Google Scholar] [CrossRef]
- Dai, J.; Hu, N.; Xu, W.; Chang, C. Sparse Bayesian learning for DOA estimation with mutual coupling. Sensors 2015, 15, 26267–26280. [Google Scholar] [CrossRef] [PubMed]
- Hawes, M.; Mihaylova, L.; Septier, F.; Godsill, S. Bayesian compressive sensing approaches for direction of arrival estimation with mutual coupling effects. IEEE Trans. Antennas Propag. 2017, 65, 1357–1368. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Kim, J.M.; Lee, O.K.; Ye, J.C. Compressive MUSIC: Revisiting the link between compressive sensing and array signal processing. IEEE Trans. Inf. Theory 2012, 58, 278–301. [Google Scholar] [CrossRef]
- Lee, K.; Bresler, Y.; Junge, M. Subspace methods for joint sparse recovery. IEEE Trans. Inf. Theory 2012, 58, 3613–3641. [Google Scholar] [CrossRef]
- Lei, S.; Huali, W. Direction-of-arrival estimation based on modified Bayesian compressive sensing method. In Proceedings of the 2011 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 9–11 November 2011; pp. 1–4. [Google Scholar]
- Eldar, Y.C.; Rauhut, H. Average case analysis of multichannel sparse recovery using convex relaxation. IEEE Trans. Inf. Theory 2010, 56, 505–519. [Google Scholar] [CrossRef]
- Gurbuz, A.C.; McClellan, J.H.; Cevher, V. A compressive beamforming method. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2617–2620. [Google Scholar]
- Ji, S.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Herman, M.A.; Strohmer, T. General deviants: An analysis of perturbations in compressed sensing. IEEE J. Sel. Top. Signal Process. 2010, 4, 342–349. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, C.; Xie, L. Robustly stable signal recovery in compressed sensing with structured matrix perturbation. IEEE Trans. Signal Process. 2012, 60, 4658–4671. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, G.; Wang, L.; Zhang, H. An improved auto-calibration algorithm based on sparse Bayesian learning framework. IEEE Signal Process. Lett. 2013, 20, 889–892. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L.; Zhang, C. Off-grid direction of arrival estimation using sparse Bayesian inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef]
- Yang, X.; Ko, C.C.; Zheng, Z. Direction-of-arrival estimation of incoherently distributed sources using Bayesian compressive sensing. IET Radar Sonar Navig. 2016, 10, 1057–1064. [Google Scholar] [CrossRef]
- Carlin, M.; Rocca, P.; Oliveri, G.; Viani, F.; Massa, A. Directions-of-arrival estimation through Bayesian compressive sensing strategies. IEEE Trans. Antennas Propag. 2013, 61, 3828–3838. [Google Scholar] [CrossRef]
- Dai, J.; Bao, X.; Xu, W.; Chang, C. Root sparse Bayesian learning for off-grid DOA estimation. IEEE Signal Process. Lett. 2017, 24, 46–50. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Pisarenko, V.F. The Retrieval of Harmonics from a Covariance Function. Geophys. J. R. Astron. Soc. 1973, 33, 347–366. [Google Scholar] [CrossRef]
- Rao, B.D.; Hari, K.V.S. Performance analysis of Root-Music. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1939–1949. [Google Scholar] [CrossRef]
- Marcos, S.; Marsal, A.; Benidir, M. The propagator method for source bearing estimation. Signal Process. 1995, 42, 121–138. [Google Scholar] [CrossRef]
- Mathworks. Phased Array System Toolbox with MATLAB (R2016b ed.). Available online: https://uk.mathworks.com/help/phased/examples/direction-of-arrival-estimation-with-beamscan-mvdr-and-music.html (accessed on 1 November 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Number of Multiplications | Number of Additions | Divisions |
|---|---|---|---|
| PDDA based on vector () | M × N | M × (N − M) | M − 1 |
| Computing CM | M2 × N | M2 × (N − 1) | None |
| Method | Covariance Matrix | Inverse Required? | Eigen-Decomposition (EVD) Required? | Knowledge of the Number of Arriving Signals Required? |
|---|---|---|---|
| Capon [16] | Yes | No | No |
| Maximum Entropy (ME) [39] | Yes | No | No |
| MUSIC [17] | No | Yes, in order to decompose (M × M) matrix | Yes |
| Min-Norm [19] | No | Yes | Yes |
| Pisarenko [40] | No | Yes | No |
| ESPRIT [27] | No | Yes, for decomposition of an (M × M) matrix and a (D × D) matrix | Yes |
| Root MUSIC [41] | No | Yes | Yes |
| Propagator [42] | No but it needs to compute matrix inverse with size (D × D) | No | Yes |
| PDDA | No | No | No |
| Method | Number of Multiplications | Number of Additions |
|---|---|---|
| Capon | M × (M + 1) | (M − 1) × M + (M − 1) |
| MUSIC | (M − D) × (M + 1) | (M − D) × (M − 1) + (M – D − 1) |
| Pisarenko | M | M − 1 |
| Propagator | M × (M + 1) | (M − 1) × M + (M − 1) |
| PDDA | M | M − 1 |
| Method | Computational Complexity |
|---|---|
| Capon | O(M2 N + M3 + M2(180/)) |
| MUSIC | O(M2 N + M3 + M2(180/)) |
| ESPRIT | O(M2 N + M3 + D3) |
| Min-norm | O(M2 N + M3 + M(180/)) |
| Pisarenko | O(M2 N + M3 + M (180/)) |
| ME | O(M2 N + M3 + M (180/)) |
| Propagator | O(M2 N + M2 D + M2 (180/)) |
| OGSBI | O(max(M (180/)2, M N (180/)) per iteration |
| PDDA | O(M N + M (180/)) |
| Case | Elevation Angles (θ) | Azimuth Angles (ϕ) |
|---|---|---|
| 1 | 32° | 40° |
| 50° | 200° | |
| 2 | 42° | 69° |
| 44° | 163° | |
| 46° | 298° | |
| 3 | 39° | 115° |
| 36° | 40° | |
| 17° | 20° |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Sadoon, M.A.G.; Ali, N.T.; Dama, Y.; Zuid, A.; Jones, S.M.R.; Abd-Alhameed, R.A.; Noras, J.M. A New Low Complexity Angle of Arrival Algorithm for 1D and 2D Direction Estimation in MIMO Smart Antenna Systems. Sensors 2017, 17, 2631. https://doi.org/10.3390/s17112631
Al-Sadoon MAG, Ali NT, Dama Y, Zuid A, Jones SMR, Abd-Alhameed RA, Noras JM. A New Low Complexity Angle of Arrival Algorithm for 1D and 2D Direction Estimation in MIMO Smart Antenna Systems. Sensors. 2017; 17(11):2631. https://doi.org/10.3390/s17112631
Chicago/Turabian StyleAl-Sadoon, Mohammed A. G., Nazar T. Ali, Yousf Dama, Abdulkareim Zuid, Stephen M. R. Jones, Raed A. Abd-Alhameed, and James M. Noras. 2017. "A New Low Complexity Angle of Arrival Algorithm for 1D and 2D Direction Estimation in MIMO Smart Antenna Systems" Sensors 17, no. 11: 2631. https://doi.org/10.3390/s17112631