
Analysis and Tools for Improved Management of Connectionless and Connection-Oriented BLE Devices Coexistence




Abstract
:1. Introduction
2. Related Works
2.1. Overview on Discovery Process Issues
2.2. Overview on Connection-Oriented Issues
3. Bluetooth Low Energy
4. Materials and Methods
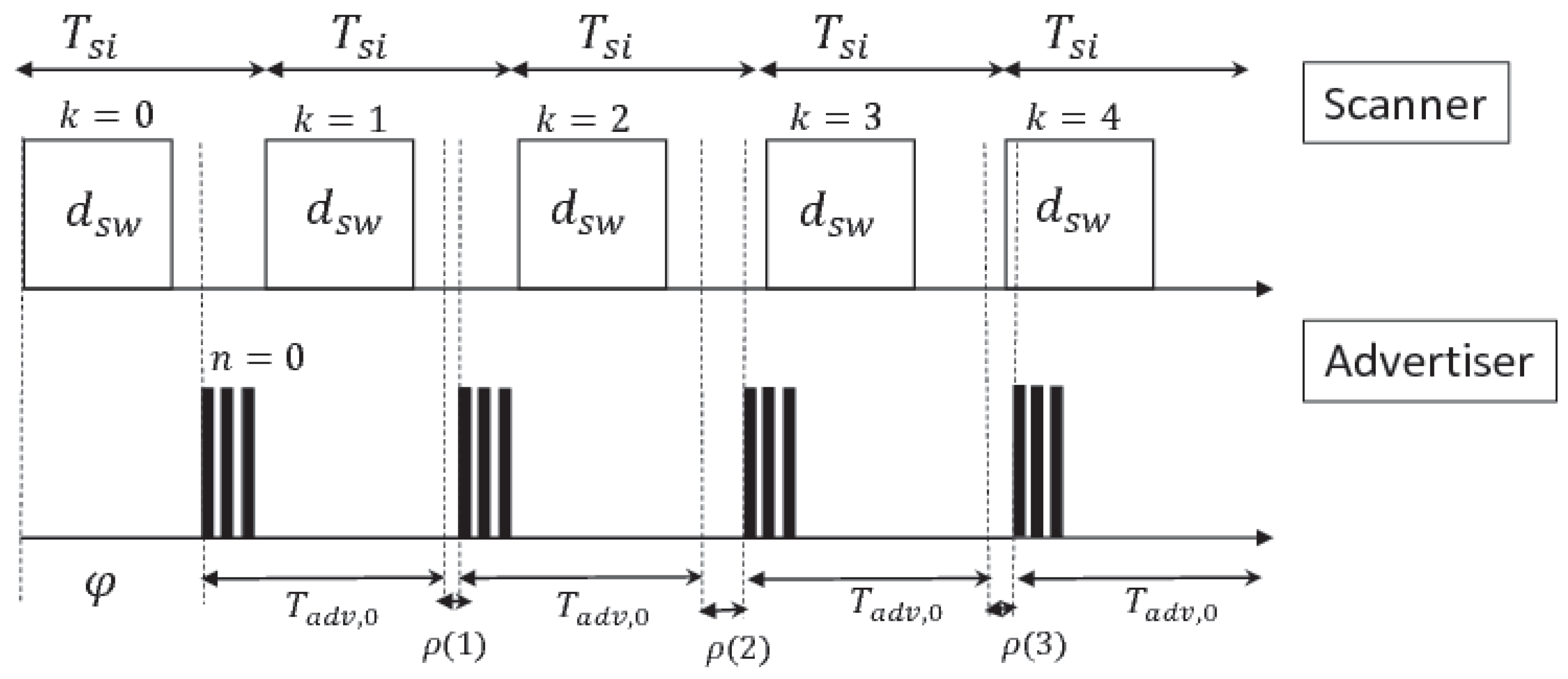
4.1. Connectionless Model
- (i)
- reducing the probability of advertising packets collision,
- (ii)
- preventing a tag from missing consecutive scan events.
- (i)
- , i.e., the offset between the first scan event and the first advertising event anchor points, is modeled through the uniform distribution with boundaries 0 and ,
- (ii)
- shifts ,
- (iii)
- is the sum of n independent random variables .
| Algorithm 1 Discovery latency estimation. The function takes as input arguments the scan interval , the scan window and the advertising interval , and gives back the expected discovery latency . |
|
- (i)
- is the probability for a successful reception of the n-th advertising event, given that all previous events have not been received at the scanner,
- (ii)
- is the cumulative miss probability that n advertising events do not lead to a successful reception.
4.2. Connection-Oriented Model
- (i)
- connection interval () from ms to 4 s in steps of ms,
- (ii)
- slave latency, that is the number of connection events the slave could skip in lack of packets to send,
- (iii)
- supervision timeout, maximum time the master must wait in the case of a lack of slave link before closing the connection.
- (i)
- the slave request, i.e., a minimum and a maximum value of acceptable ,
- (ii)
4.3. Coexistence Issues Modeling
| Algorithm 2 Parameter designer tool. The function takes as input the connection intervals and , the advertising interval , and the percentage of packets the master must guarantee to exchange with the slaves without overlaps, and gives back the scan interval , the scan window , and the derived expected discovery latency . |
|
5. Results
5.1. Connectionless Model Results
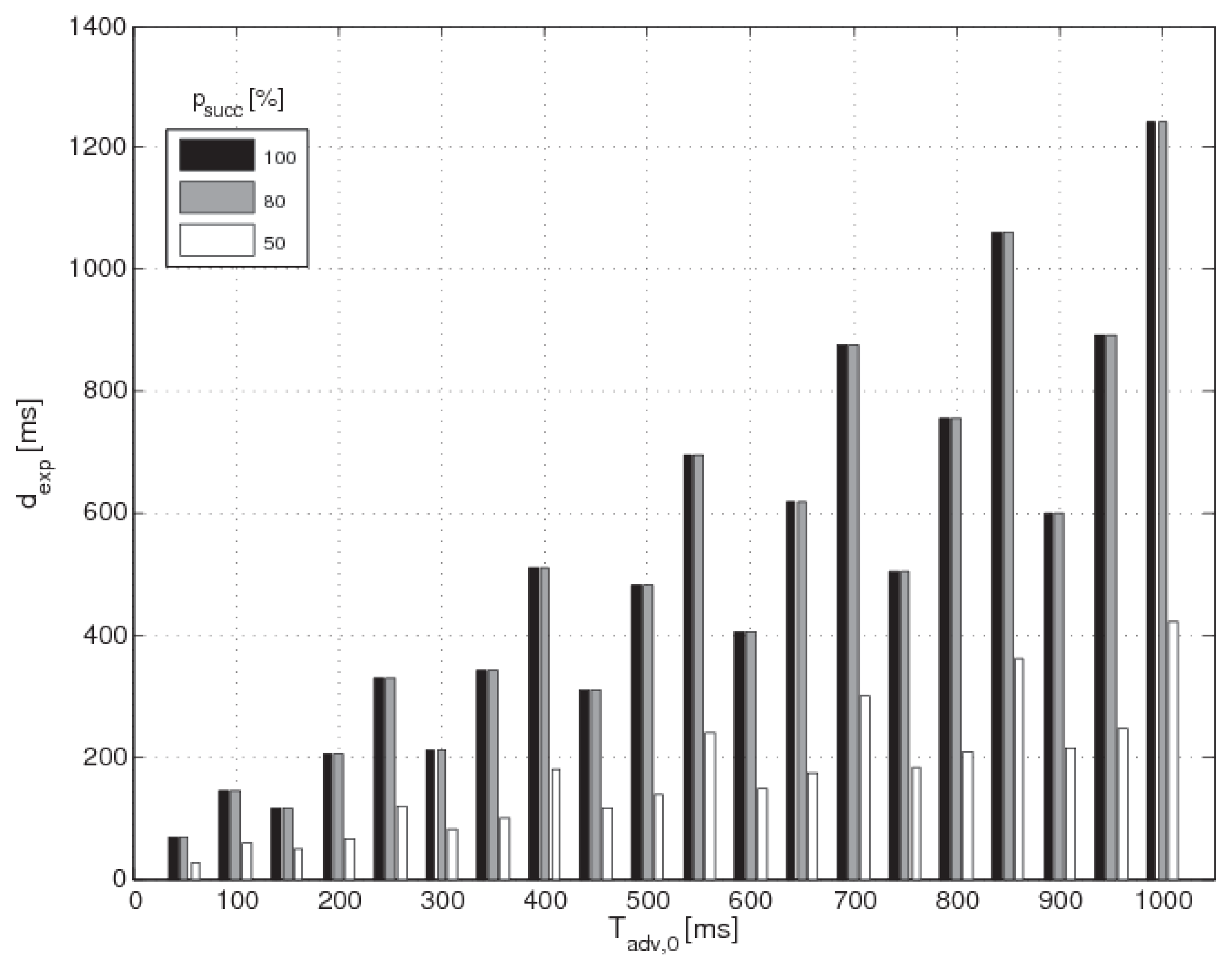
5.2. Coexistence Model Results
- (i)
- because of the condition of no-time-coincidence expressed by Equation (10) the master can accept only values of multiple of ; indeed, the histogram depicts bars only for values of multiple of 50 ms,
- (ii)
- the black bar is usually higher (or equal) than the grey one, and the latter greater (or equal) than the white one; this depends on the percentage that must be guaranteed,
- (iii)
- for some values of the bars have similar height; in these cases the discovery latency is not sensitive to , at least above a certain percentage threshold, e.g., for ms the value of is equal to ms independently of from to .
5.3. Application in Home Automation and AAL Context
- magnetic sensors placed on the entry door and on the windows, to detect opening and closing events;
- a Passive Infrared (PIR) sensor to be installed in the bathroom, to detect the user’s presence;
- a bed sensor placed under the mattress.
- (i)
- the percentage of connection events successfully run up to all those scheduled reaches the ;
- (ii)
- the expected discovery latency will be ms for sensors with advertising interval equal to 100 ms.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Table of Symbols
| Models Parameters | ||
| Symbol | Unit | Description |
| [s] | Static advertising interval, settable for the advertisers in the range from 20 ms to 10,240 ms in steps of 0.625 ms | |
| [s] | Dynamic additive delay up to 10 ms added to for the n-th advertising event | |
| [s] | Advertising interval value of the n-th advertising event, equal to | |
| [s] | Offset between the beginning of the first scan event and the first advertising event | |
| [s] | Interval between two consecutive scan events, settable for the scanners in the range from 0 to 10,240 ms | |
| [s] | Duration of active scanning for scan event, settable for the scanners in the range from 0 to | |
| - | Advertising channel number: 37, 38, 39 | |
| [s] | Time before the beginning of the k-th scan event that allows the n-th advertising event to fall within the k-th scan window; depends on | |
| [s] | Time before the end of the k-th scan event that allows the n-th advertising event to fall within the k-th scan window; depends on | |
| [s] | Time for sending an advertising packet on a single channel and listening to a possible response, up to 10 ms | |
| [s] | Current portion of the k-th advertising event which the advertiser has already run. | |
| [s] | Effective scan window, equal to | |
| [s] | Anchor point of the n-th advertising event; also depends on | |
| - | Probability distribution function of | |
| [s] | Model boundary for equal to | |
| - | Expected value of X probability density function | |
| - | Standard deviation of X probability density function | |
| - | Half time interval width, which at least the of falls within | |
| - | Lowest index of the scan events the n-th advertising event probabilistically overlaps with | |
| - | Highest index of the scan events the n-th advertising event probabilistically overlaps with | |
| [s] | Start time of the k-th scan event with duration | |
| [s] | End time of the k-th scan event with duration | |
| - | Cumulative distribution function of a random variable X, representing the probability that the random variable X takes on a value less than or equal to X | |
| - | Probability for an advertising event being received in the k-th scan event | |
| - | Probability for a successful reception of the n-th advertising event, given that all previous events have not been received at the scanner | |
| Model parameter representing the upper bound of | ||
| - | Cumulative miss probability that n advertising events do not lead to a successful reception. | |
| [s] | Expected discovery latency for given , and | |
| [s] | Mean discovery latency calculated by the algorithm in [18] | |
| [s] | Interval between two consecutive connection events, settable in the range from to 4000 ms in steps of ms | |
| [s] | Duration of a connection event, up to 10 ms | |
| [s] | Duration of the time used for channel hopping | |
| [s] | Sum of and | |
| [s] | Offset between A’s and B’s first anchor points | |
| [%] | Percentage of connection events successfully run up to all those scheduled | |
| - | Greatest common divisor of a and b | |
| - | Least common multiple of a and b | |
| - | Minimum value between a and b | |
| - | Maximum value between a and b | |
Abbreviations
| AAL | Ambient Assisted Living |
| ANT | Advanced and Adaptive Network Technology |
| BAN | Body Area Network |
| BLE | Bluetooth Low Energy |
| BT | Classic Bluetooth |
| CLT | Central Limit Theorem |
| FHSS | Frequency Hopping Spread Spectrum |
| GFSK | Gaussian Frequency-shift keying |
| IEEE | Institute of Electrical and Electronics Engineers |
| IoT | Internet of Things |
| ISM | Industrial, Scientific and Medical |
| MQTT | Message Queuing Telemetry Transport |
| NFC | Near Field Communication |
| PIR | Passive Infra-Red |
| RNG | Random Number Generator |
| SIG | Special Interest Group |
| TDMA | Time Division Multiple Access |
| WiFi | Wireless Fidelity |
References
- Specification of the Bluetooth System: Covered Core Package, version 4.0; Bluetooth SIG (Hrsg.): Kirkland, WA, USA, 2010.
- Discover Bluetooth. Available online: https://www.bluetooth.com/what-is-bluetooth-technology/discover-bluetooth (accessed on 20 Feburary 2017).
- Bronzi, W.; Frank, R.; Castignani, G.; Engel, T. Bluetooth Low Energy performance and robustness analysis for Inter-Vehicular Communications. Ad Hoc Netw. 2016, 37, 76–86. [Google Scholar] [CrossRef]
- Xia, K.; Wang, H.; Wang, N.; Yu, W.; Zhou, T. Design of automobile intelligence control platform based on Bluetooth low energy. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 2801–2805. [Google Scholar]
- Caballero-Gil, C.; Caballero-Gil, P.; Molina-Gil, J. Cellular Automata-Based Application for Driver Assistance in Indoor Parking Areas. Sensors 2016, 16, 1921. [Google Scholar] [CrossRef] [PubMed]
- Cerruela García, G.; Luque Ruiz, I.; Gómez-Nieto, M.A. State of the Art, Trends and Future of Bluetooth Low Energy, Near Field Communication and Visible Light Communication in the Development of Smart Cities. Sensors 2016, 16, 1968. [Google Scholar] [CrossRef] [PubMed]
- Miranda, J.; Memon, M.; Cabral, J.; Ravelo, B.; Wagner, S.R.; Pedersen, C.F.; Mathiesen, M.; Nielsen, C. Eye on Patient Care: Continuous Health Monitoring: Design and Implementation of a Wireless Platform for Healthcare Applications. IEEE Microw. Mag. 2017, 18, 83–94. [Google Scholar] [CrossRef]
- Del Campo, A.; Montanini, L.; Perla, D.; Gambi, E.; Spinsante, S. BLE analysis and experimental evaluation in a walking monitoring device for elderly. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar]
- Wang, Y.; Doleschel, S.; Wunderlich, R.; Heinen, S. Evaluation of Digital Compressed Sensing for Real-Time Wireless ECG System with Bluetooth low Energy. J. Med. Syst. 2016, 40, 170. [Google Scholar] [CrossRef] [PubMed]
- Miao, F.; Cheng, Y.; He, Y.; He, Q.; Li, Y. A Wearable Context-Aware ECG Monitoring System Integrated with Built-in Kinematic Sensors of the Smartphone. Sensors 2015, 15, 11465–11484. [Google Scholar] [CrossRef] [PubMed]
- Blank, P.; Hofmann, S.; Kulessa, M.; Eskofier, B.M. miPod 2: A New Hardware Platform for Embedded Real-time Processing in Sports and Fitness Applications. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; ACM: New York, NY, USA, 2016; pp. 881–884. [Google Scholar]
- Imani, S.; Bandodkar, A.J.; Mohan, A.M.V.; Kumar, R.; Yu, S.; Wang, J.; Mercier, P.P. A wearable chemical–electrophysiological hybrid biosensing system for real-time health and fitness monitoring. Nat. Commun. 2016, 7, 11650. [Google Scholar] [CrossRef] [PubMed]
- Aguilar, S.; Vidal, R.; Gomez, C. Opportunistic Sensor Data Collection with Bluetooth Low Energy. Sensors 2017, 17, 159. [Google Scholar] [CrossRef] [PubMed]
- Hortelano, D.; Olivares, T.; Ruiz, M.C.; Garrido-Hidalgo, C.; López, V. From Sensor Networks to Internet of Things. Bluetooth Low Energy, a Standard for This Evolution. Sensors 2017, 17, 372. [Google Scholar] [CrossRef] [PubMed]
- Collotta, M.; Pau, G. A Novel Energy Management Approach for Smart Homes Using Bluetooth Low Energy. IEEE J. Sel. Areas Commun. 2015, 33, 2988–2996. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Chen, C.; Ma, Y. Modeling Neighbor Discovery in Bluetooth Low Energy Networks. IEEE Commun. Lett. 2012, 16, 1439–1441. [Google Scholar] [CrossRef]
- Kindt, P.; Yunge, D.; Diemer, R.; Chakraborty, S. Precise Energy Modeling for the Bluetooth Low Energy Protocol. ArXiv.org, 2014; arXiv:1403.2919. [Google Scholar]
- Gomez, C.; Oller, J.; Paradells, J. Overview and Evaluation of Bluetooth Low Energy: An Emerging Low-Power Wireless Technology. Sensors 2012, 12, 11734–11753. [Google Scholar] [CrossRef]
- Cho, K.; Park, G.; Cho, W.; Seo, J.; Han, K. Performance analysis of device discovery of Bluetooth Low Energy (BLE) networks. Comput. Commun. 2016, 81, 72–85. [Google Scholar] [CrossRef]
- Jeon, W.S.; Dwijaksara, M.H.; Jeong, D.G. Performance Analysis of Neighbor Discovery Process in Bluetooth Low-Energy Networks. IEEE Trans. Veh. Technol. 2017, 66, 1865–1871. [Google Scholar] [CrossRef]
- Østhus, P.M. Concurrent Operation of Bluetooth Low Energy and ANT Wireless Protocols with an Embedded Controller. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2011. [Google Scholar]
- Campo, A.D.; Gambi, E.; Montanini, L.; Perla, D.; Raffaeli, L.; Spinsante, S. MQTT in AAL systems for home monitoring of people with dementia. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | |||
|---|---|---|---|
| 37 | 0 | ||
| 38 | |||
| 39 |
| Channel | |
|---|---|
| 37 | |
| 38 | |
| 39 |
| Parameter | Value [ms] |
|---|---|
| 100 | |
| 25 | |
| [] |
| Parameter | Value [ms] | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50.00 | 100.00 | 150.00 | 200.00 | 250.00 | 300.00 | 350.00 | 400.00 | 450.00 | 500.00 | 550.00 | 600.00 | |
| 50.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | |
| 29.55 | 79.55 | 29.55 | 79.55 | 29.55 | 79.55 | 29.55 | 79.55 | 29.55 | 79.55 | 29.55 | 79.55 | |
| 29.55 | 79.55 | 29.55 | 79.55 | 79.55 | 79.55 | 79.55 | 79.55 | 79.55 | 89.70 | 89.70 | 89.70 | |
| 39.70 | 79.55 | 79.55 | 89.70 | 89.70 | 89.70 | 89.70 | 89.70 | 89.70 | 89.70 | 89.70 | 89.70 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del Campo, A.; Cintioni, L.; Spinsante, S.; Gambi, E. Analysis and Tools for Improved Management of Connectionless and Connection-Oriented BLE Devices Coexistence. Sensors 2017, 17, 792. https://doi.org/10.3390/s17040792
Del Campo A, Cintioni L, Spinsante S, Gambi E. Analysis and Tools for Improved Management of Connectionless and Connection-Oriented BLE Devices Coexistence. Sensors. 2017; 17(4):792. https://doi.org/10.3390/s17040792
Chicago/Turabian StyleDel Campo, Antonio, Lorenzo Cintioni, Susanna Spinsante, and Ennio Gambi. 2017. "Analysis and Tools for Improved Management of Connectionless and Connection-Oriented BLE Devices Coexistence" Sensors 17, no. 4: 792. https://doi.org/10.3390/s17040792
APA StyleDel Campo, A., Cintioni, L., Spinsante, S., & Gambi, E. (2017). Analysis and Tools for Improved Management of Connectionless and Connection-Oriented BLE Devices Coexistence. Sensors, 17(4), 792. https://doi.org/10.3390/s17040792