This section starts from the equation of the optical power received at a detector considered as a point detector located somewhere in the space. Subsequently, the proposed reflection model will be gradually adjusted and refined until attaining the final reflection model.
3.1. Initial Considerations
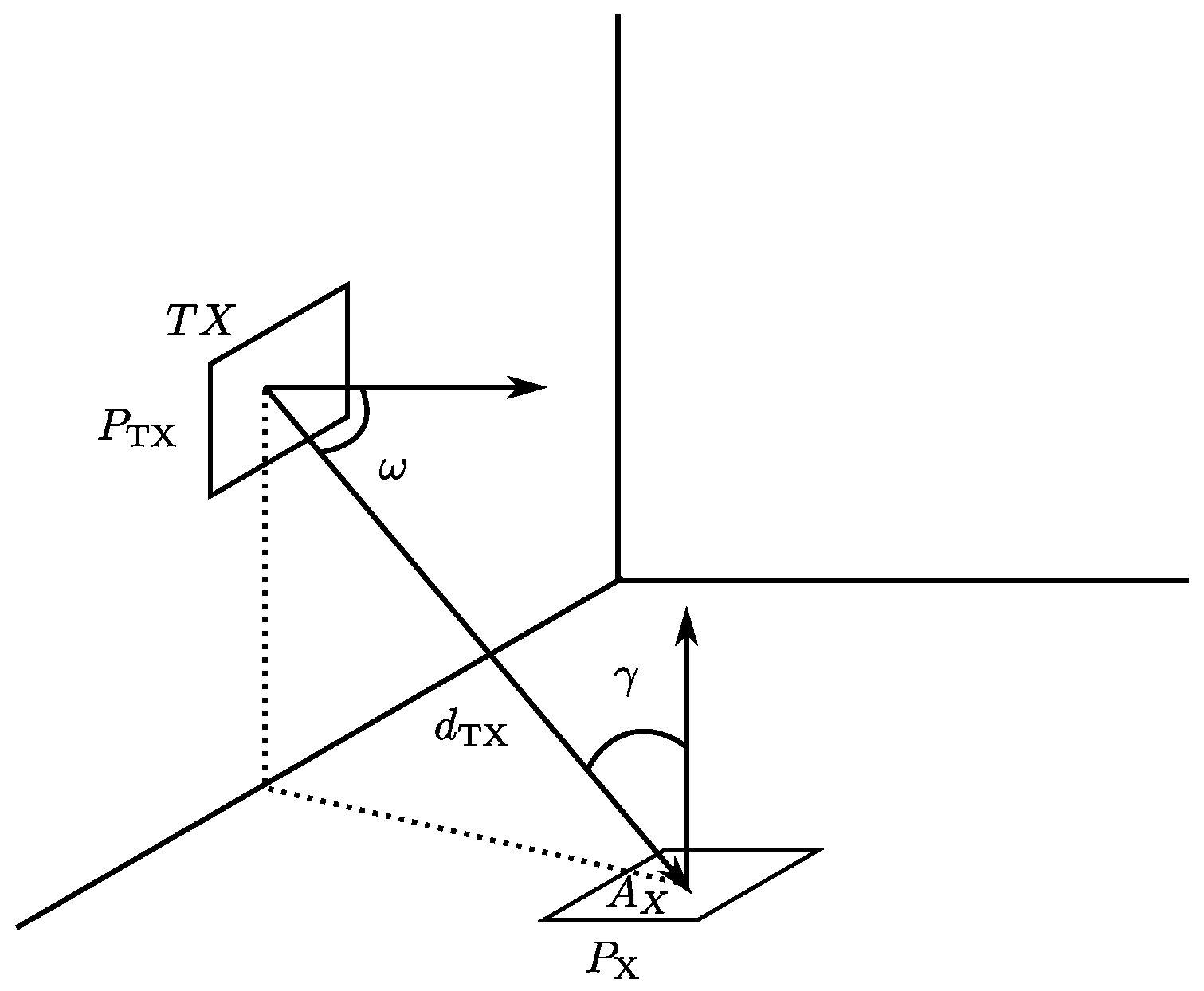
In this section, we describe a model that considers the propagation of an electromagnetic (light) signal inside an ideal channel between the emitter and detector, with a continuous stable and known emitted power and only receiving the LOS component.
In general, the ratio between the power (
) of the signal received in the detector at a given point in space and the energy emitted from the emitter location (
Figure 3) is given by Equation (
1):
where
represents the emission pattern,
the LOS distance from emitter to receiver,
the transmission function of a filter placed in the detector,
the response of the receiver (including the gain of any optic concentrator and its response) and
is the effective area of the receiver.
represents the energy per unit area that the emitter generates in the location where the detector is placed.
The emission pattern,
, may be expressed as Equation (
2):
where
n is the radiation lobe index,
is the emitter power and
is the angle at which the radiated intensity from the emitter is evaluated with respect to the axial angle of the emitter.
The index
n is given by Expression (
3):
where
is the angle at which the power is half that of the power at
.
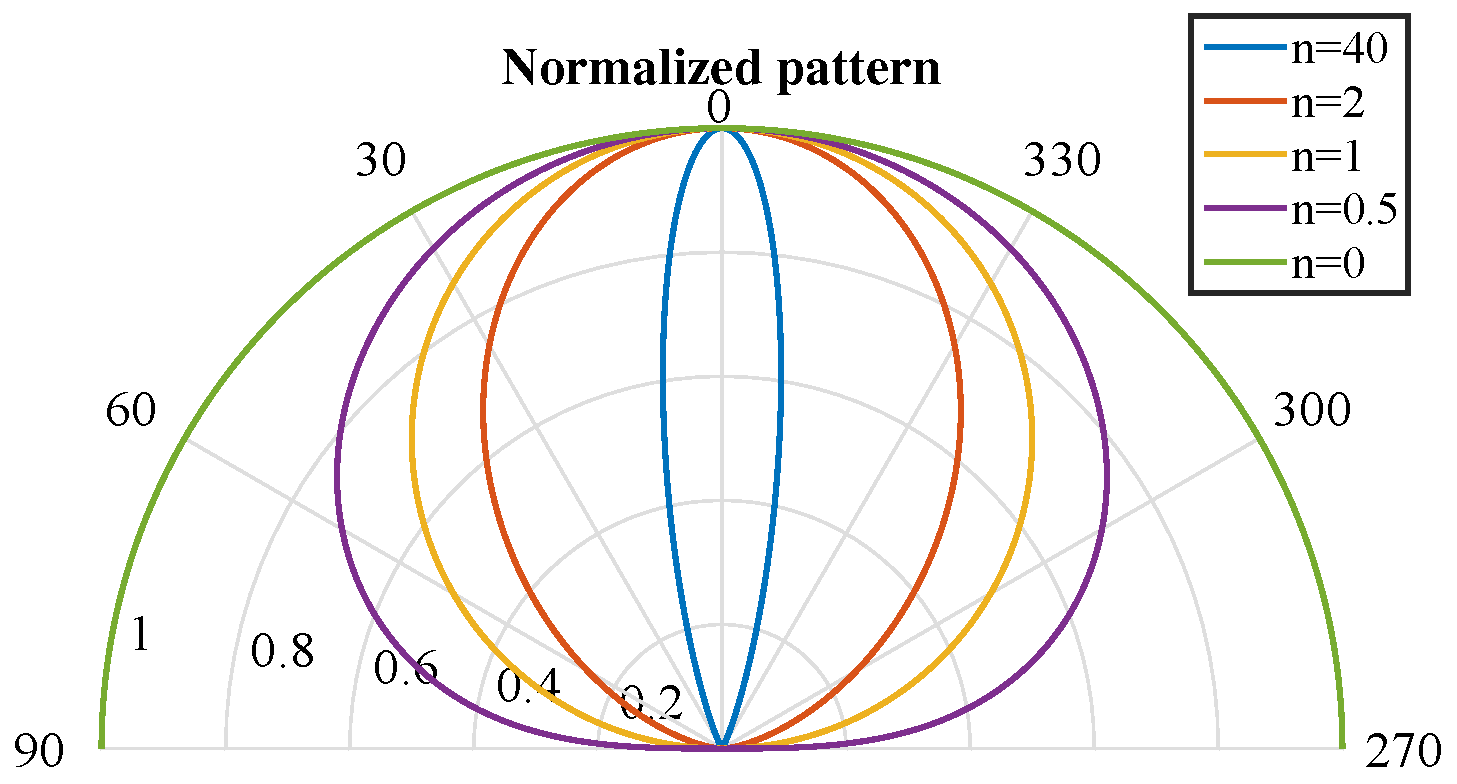
The n index provides information about the directionality of the emitter. High n index values represent very directional behavior (narrow emission lobes), whereas low n index values represent wide emission lobes, dividing the emitted power into a cone with a higher aperture.
Figure 4 shows several normalized emission diagrams for an emitter with different values for its
n index. Note that for
, the behavior of the emission is isotropic, and the power emitted is distributed in all directions.
For an n index value equal to one, the emission pattern has a Lambertian behavior, with a half-power angle . As previously described, the higher the n index, the narrower the emission.
If the detector does not have a coupled concentrator (optics), its behavior with respect to the axial axis is considered a Lambertian one with
as show in Equation (
4):
In this case, without coupling filters, the received signal power will be given by the Lambert expression of Equation (
5):
From the Lambert Equation (
5), we can obtain the power signal received by the detector (Rx) along the LOS path from the emitter (Tx). However, as noted earlier, it is not only the LOS signal that will arrive at the detector: other MP components will also impact on the detector.
Figure 5 shows a diagram where one of the many rays reflected on the surfaces in the environment also reaches the detector surface. Each time the light ray reflects on a surface, a fraction of the power is absorbed by the material, and the rest of the signal power is reflected. In this section, we propose to model the behavior of these reflections in the environment in order to compute the power signal that a detector will receive, based on adding other MP reflections to the LOS signal.
The reflections in the environment depend on multiple factors, the most important of which are:
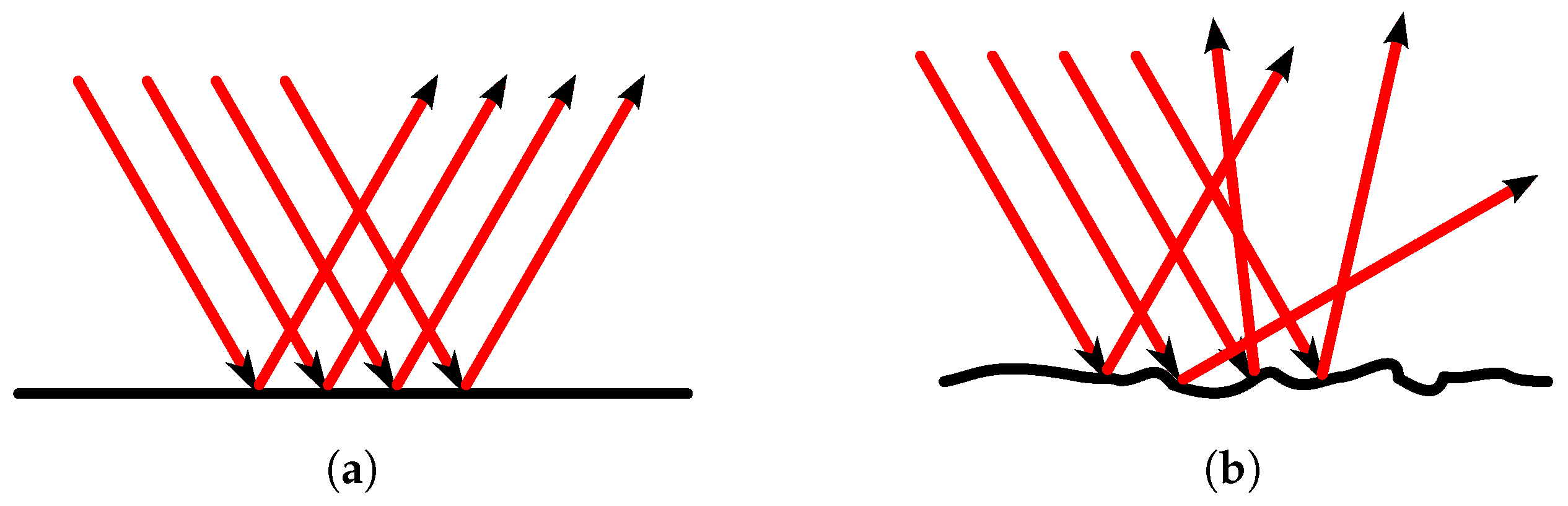
Figure 6 presents two different cases of reflection considering surface materials with different degrees of roughness.
3.2. First Approximation
In our first approximation to the model, we assume the following hypothesis: the reflection on surface materials behaves as a unique temporary emitter oriented with the same angle, but opposite sign, with respect to the normal vector of the surface as the angle of incidence, and is on the same plane, as stated by Snell’s Law (same direction as a specular reflection).
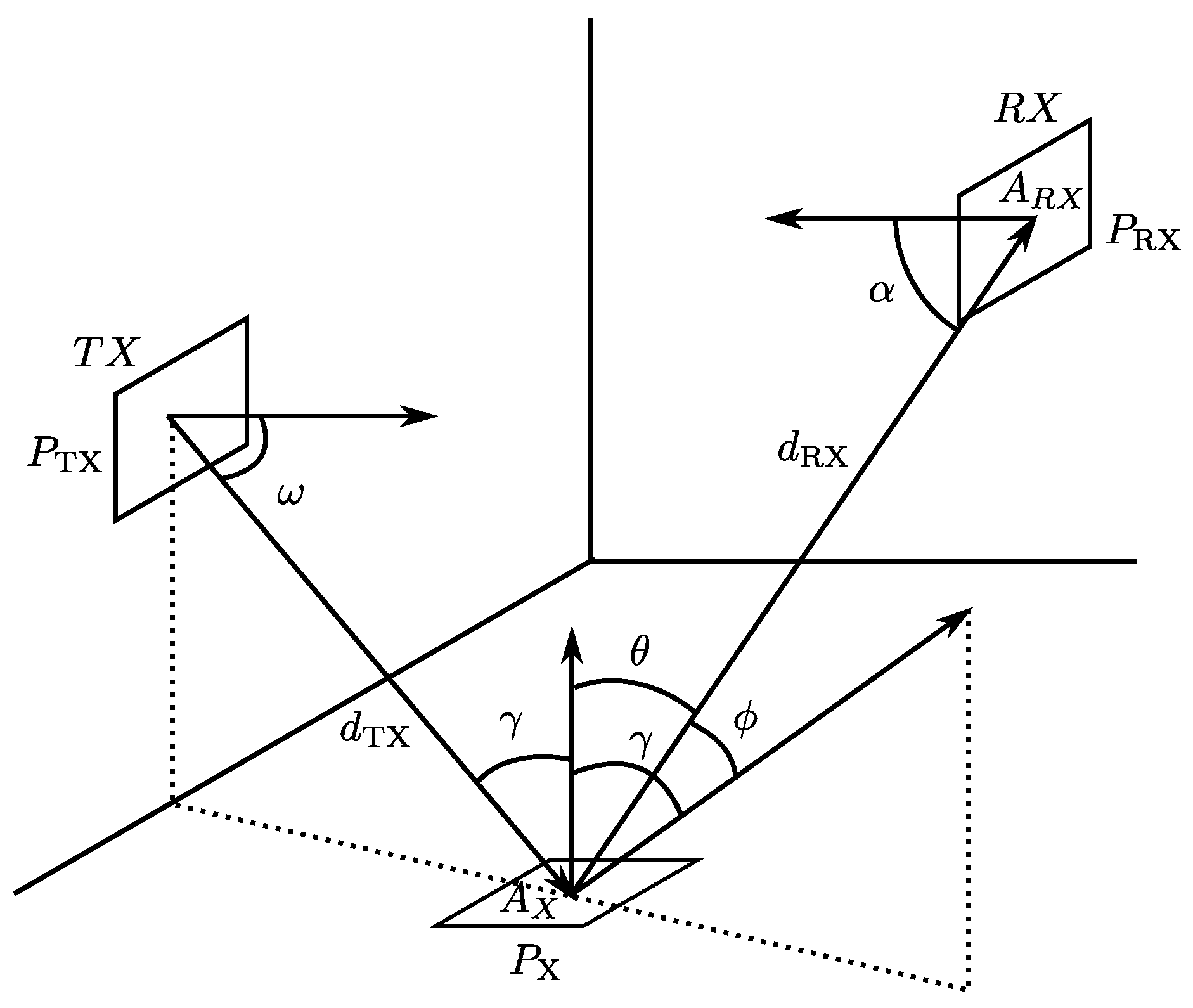
Thus, the received power in a similar setting as the one shown in
Figure 5, located at a distance
from the point
x and with an angle
wrt the surface vector
x, would be given by Equation (
6):
where
is the effective receiver area and
is the reflected power ratio wrt the total received power
. As can be seen, the above Lambert Equation (
5) has now been updated with the
emitted power. The
n index and the
constant are different for each material. The
n index represents how specular-diffuse the reflection of any surface material is.
Empirical tests showed that this particular model yields accurate results when considering rough or flat materials, but not with other kinds of surface. The reason behind this, analyzed in depth later, is that most materials have a reflection with more than one component; i.e., the real behavior will be given by the sum of multiple components, not only one Lambert equation.
3.3. Second Approximation
The second proposed hypothesis consists of a new complex model derived from the sum of multiple Lambert reflection components. The reflection on a material may be modeled as
N independent emitters, each with its own orientation, power and
n index. Now, the equation of the reflection becomes:
where
is the ratio between the power of
i components with respect to the total power
. Therefore, the sum of all of the coefficients
is equal to 1.0, as stated in Equation (
8):
Each of the components will be oriented at a certain angle
. These angles
are obtained between the vector passing through the detector and point
x (same origin for the
N considered emitters) and the orientation vector for each of the
N emitters.
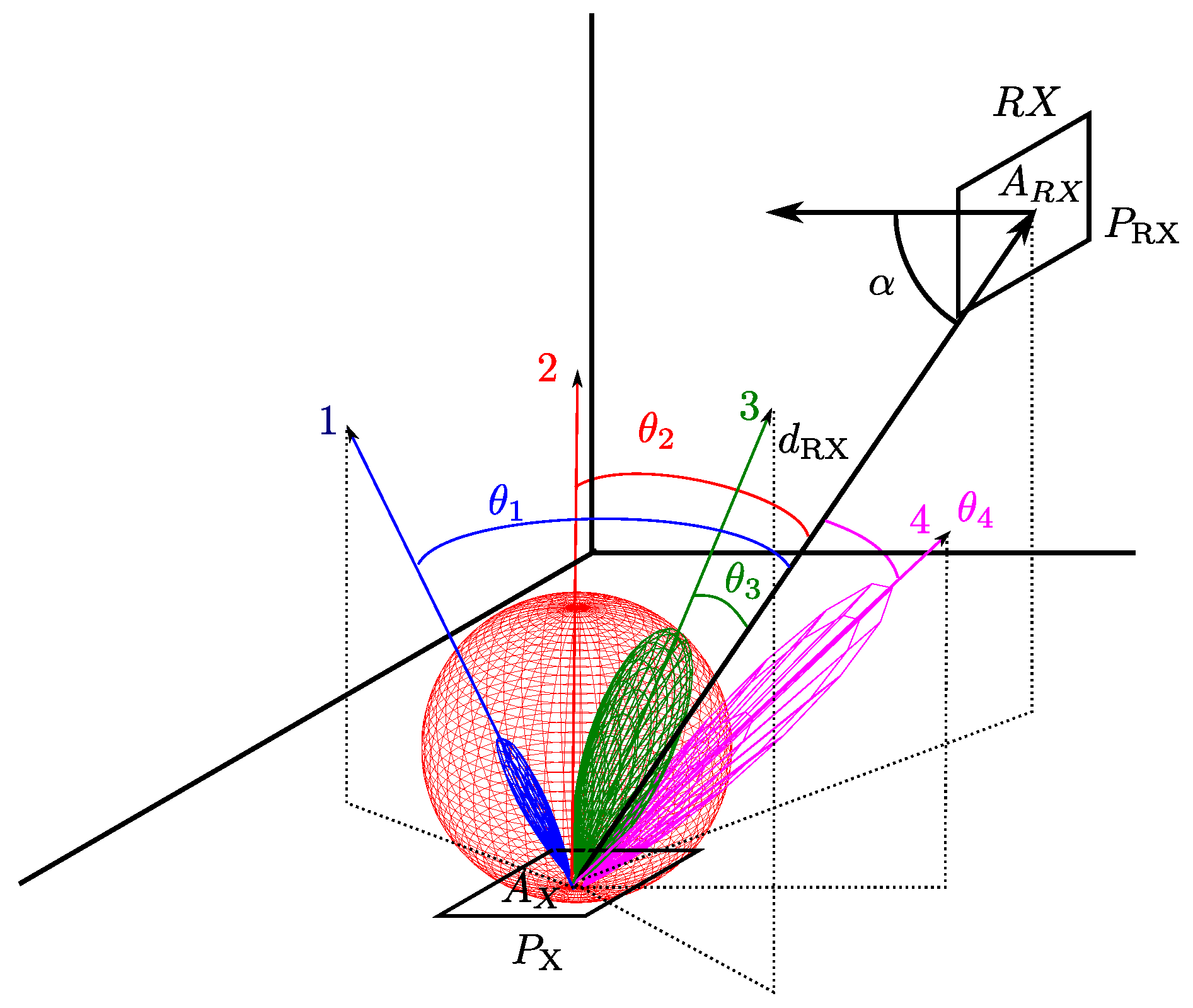
Figure 7 shows an example of the
angles of four different components.
With this current model, each material is modeled with a given reflection , N emitters, the values that represent the ratio between emitted power for each component i with respect to the total power , its orientation and the emission diagram modeled as before, with the index.
After conducting empirical tests to study the validity of the proposal, we found that a model with more than three components did not incorporate additional information (for our application and others that do not require a high accuracy). Moreover, the difference between using two or three components was not significant (in the worst case, the maximum difference was 5%). Therefore, a final model of two components will be proposed and described in the next section.
3.4. Proposed Model: Two Components
After analyzing the first two hypotheses, in this section, we describe a reflection model composed of two components, one with a more diffuse behavior characterized by a low n index and another with a more specular behavior with a high n index.
Based on the power
received in a given area
(centered on a point
x), the model considers that the power reflected on the surface centered on point
x, whose value will be
, will have an emission pattern equal to that of two independent emitters, one with a low
n index and the other with a high
n index, located at the same point
x, but with a different orientation. The diffuse component will be oriented with respect to the normal reflection surface and will emit a power
with an emission diagram characterized by the value of
(very close to what would be a pure diffuse reflection), while the specular component will be oriented at an angle
opposite to the incident ray with respect to the normal (surface vector), with a power
and an emission diagram characterized by
.
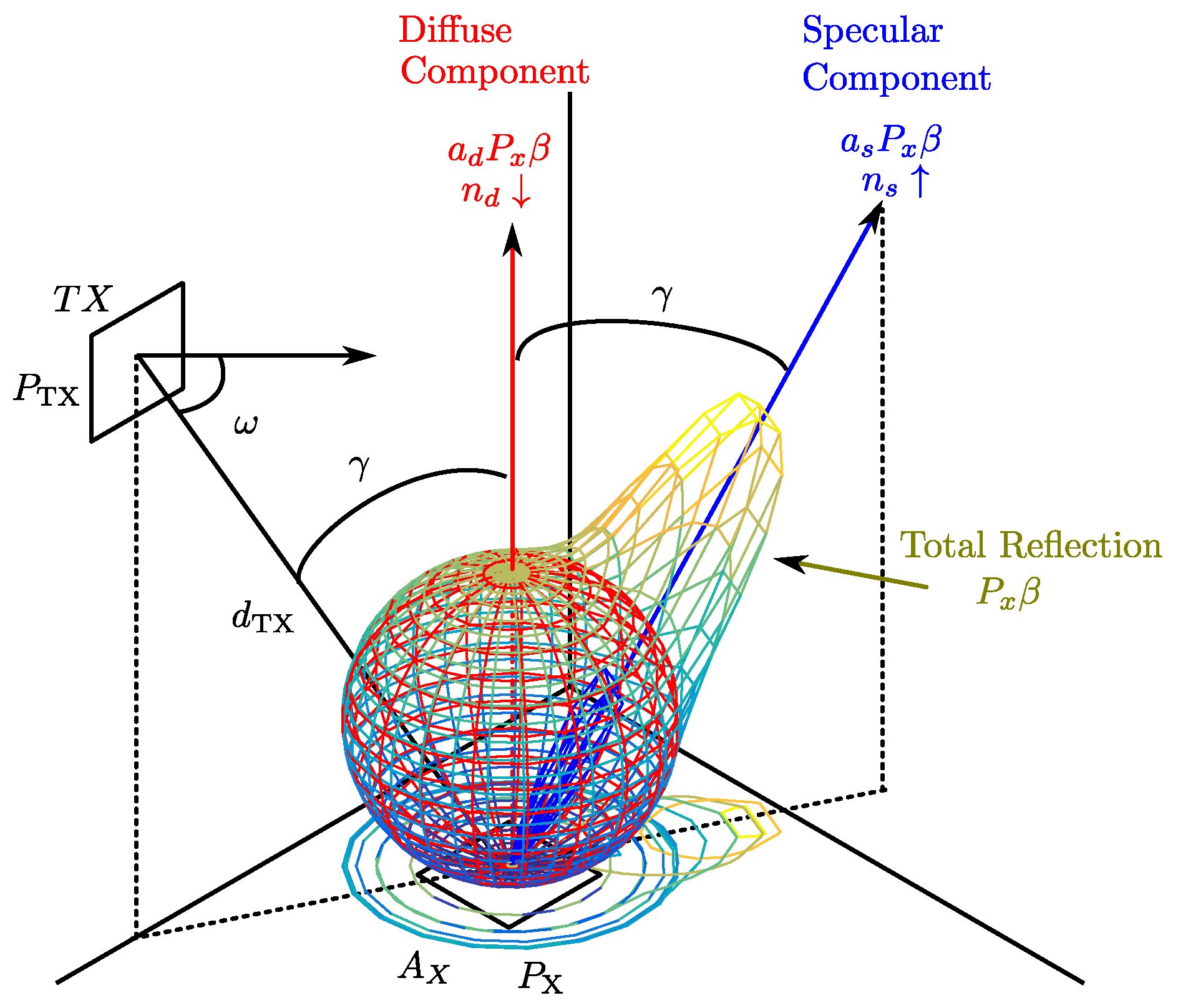
Figure 8 shows an example of the reflection at a given point
x. The diffuse component is shown as a sphere; the specular component is shown in blue; and the total reflection is graded from cyan to yellow.
For the sake of simplicity, throughout this paper, the term “diffuse component” will be used to refer to the component with the most similar behavior to a diffuse one. Similarly, the reflective component with the highest n index will be called the specular component.
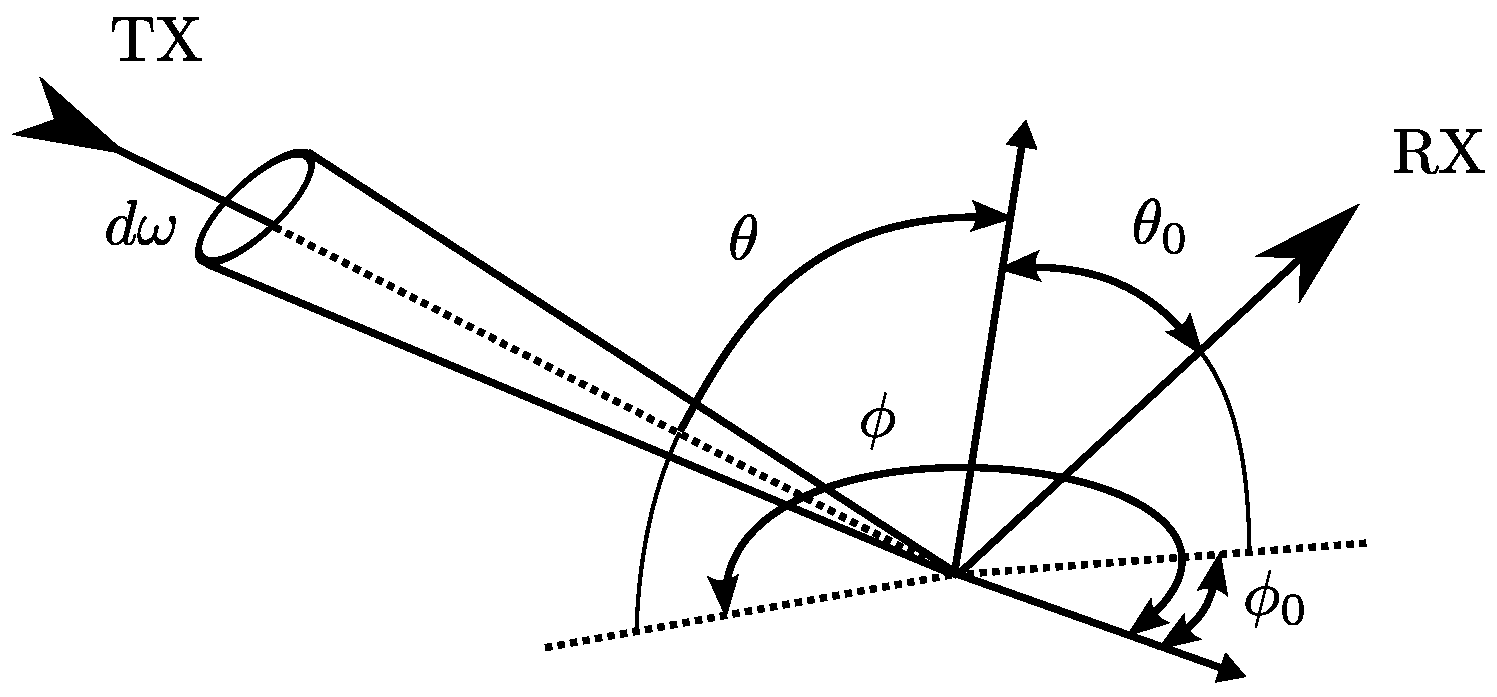
Therefore, according to the diagram shown in
Figure 5, the reflected power on a surface material,
, with a given angle of incidence
wrt to the surface normal vector, reaching the detector at a given angle
wrt the normal and
angle wrt the maximum reflection ray (opposite to the incident ray), at a distance
and with an effective detector area
, will be the sum of the two components in the current model:
where diffuse and specular power values are given by the Equations (
10) and (
11), respectively:
Therefore, the complete expression for the power is given in Equation (
12):
where
is the effective receiver area that can be expressed as
, where
is the receiver area and
the angle between the incident ray on the detector wrt the surface normal vector.
Given that the sum of power emitted by the specular and diffuse components must be equal to the reflected power on the surface material, the expression in Equation (
13) must be fulfilled:
due to the fact that both represent the total reflected power for each of the two considered components.
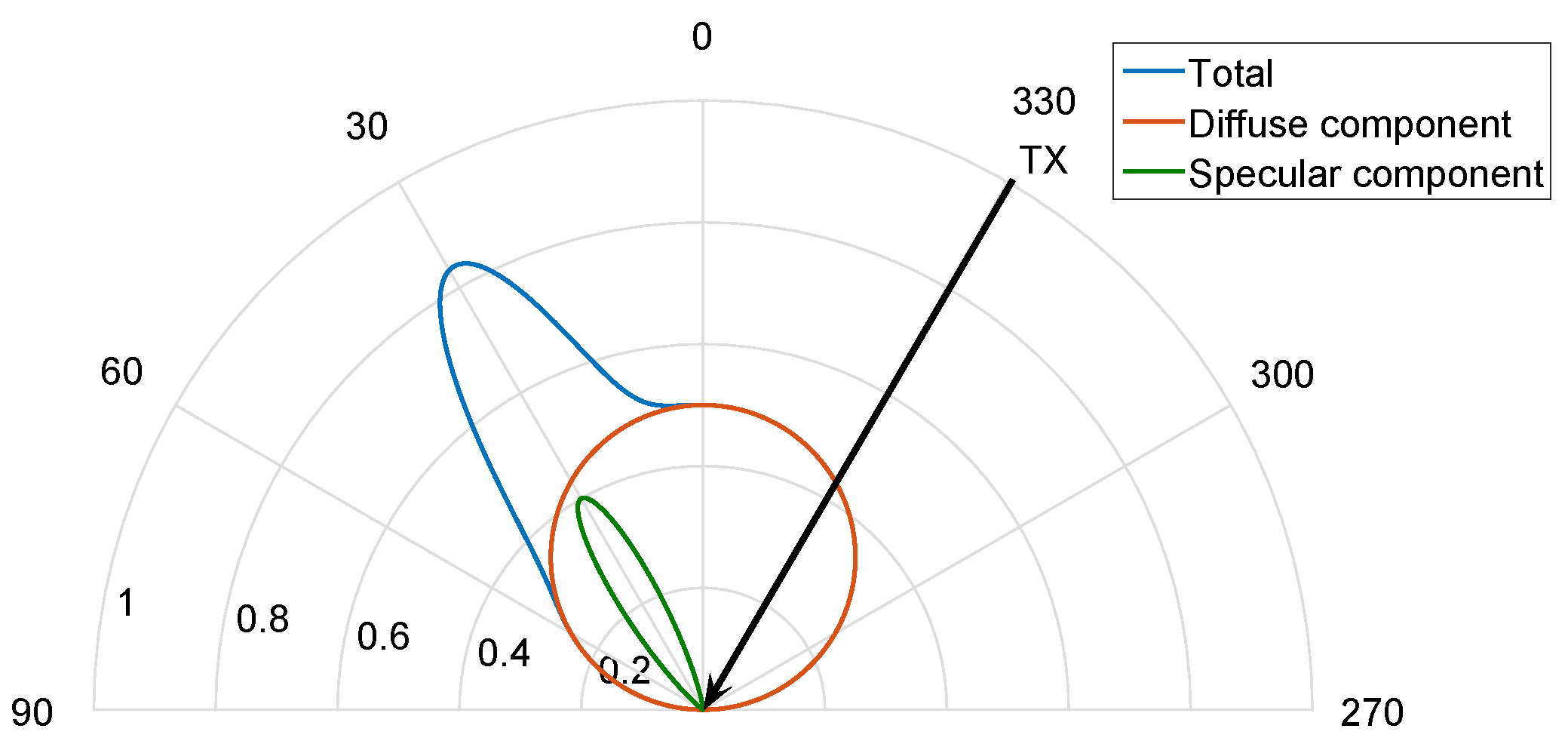
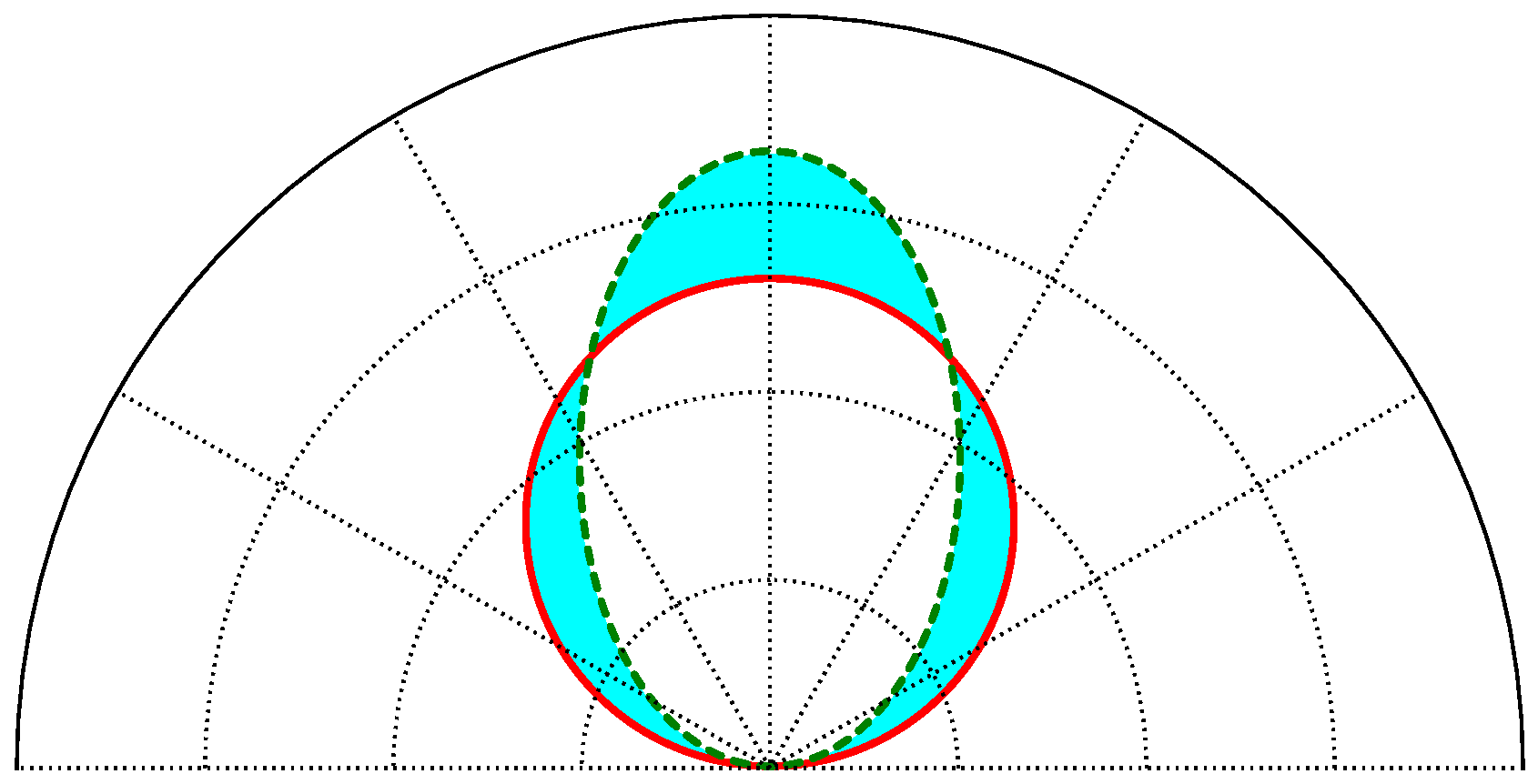
To facilitate understanding of the following descriptions, a reflection example with these two components is shown in
Figure 9. The emitter is located at an angle
. The diffuse component (in red) is oriented along the surface normal vector, in this case
, with a wide emission diagram characterized by a low
n index. The specular component (in green) is oriented along the
angle (symmetric to the normal vector) and has a narrower emission diagram characterized with a high
n index. The sum of both reflection components is shown in blue.
The parameters from Equation (
12) that remain constant for different surface materials are the effective sensor area
, the distance between the reflection point and the detector
and the power
of the incident ray on the reflection point
x. The parameters that change for different surface materials are the diffuse and specular components (
and
respectively), their emission
n indexes (
and
) and the specific reflection of the material (
).
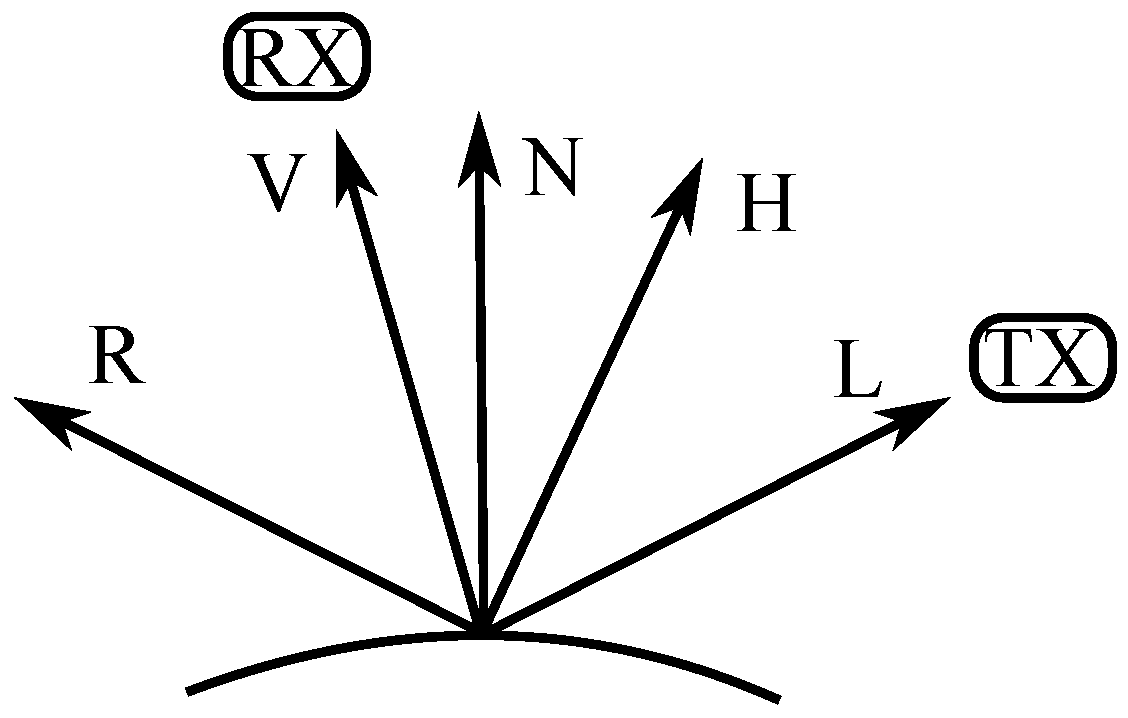
There are important differences between the proposed model and the Phong model; firstly, the Phong model considers that the diffuse component has an index , whereas in our proposition, this value will be different for each surface material. However, the main difference is that in our case, the parameters , , and are variable depending on the angle of incidence, a behavior that has been seen in real reflections. Therefore, this latter model presents a better fit with the real behavior of light ray reflections in the environment. On the other hand, a new function must be characterized to adjust these parameters along the different angles of incidence.
One simple approximation for such a function is given in Equation (
14):
where
z is the name of each variable parameter and
and
are the coefficients to be fitted.
Hence, the functions for parameters
,
,
and
are the following:
Therefore, the expression for the reflection model as a function of the angle of incidence
is shown in Equation (
19):
where the subterms
and
are given by Equations (
20) and (
21), respectively:
and
K represents the grouped factor parameters that are constant:
In Equation (
19), the subterm
K could be reduced to the
parameter if particular values for the effective area,
, and
are considered. In our case, we chose not to reduce the number of parameters and to use the parameter
K, since we could obtain the rest of the parameters for any value of the effective area,
, or
.
When using the reflection model, the subterm K will be extracted and used to obtain the specific material reflection value, , since the emitted power and as a consequence the power are known, and the rest of the parameters can be measured with sufficient accuracy.
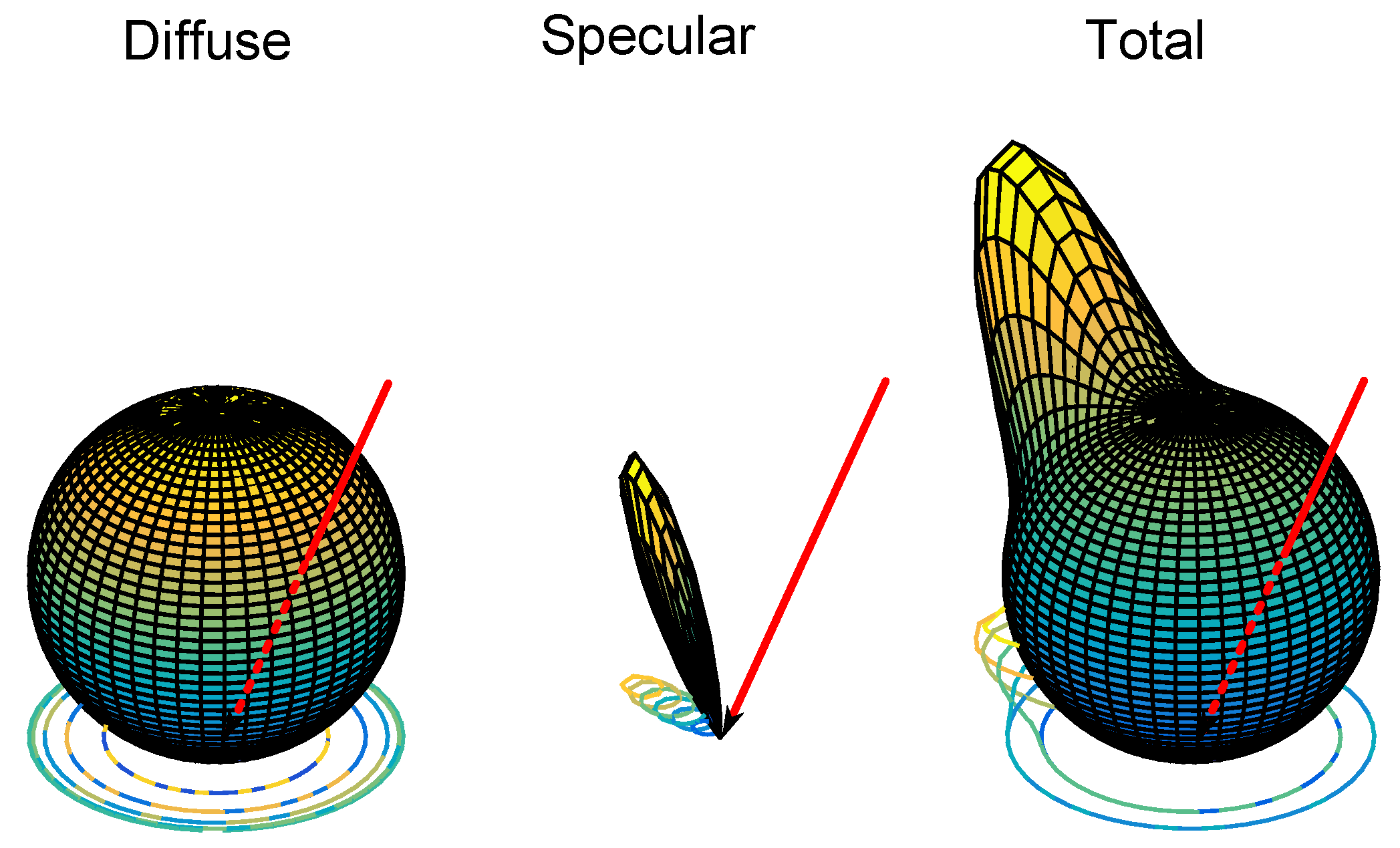
The proposed reflection model considers that the reflection diagram of a particular surface material is the sum of the 3D diagrams of the diffuse and specular components. The 3D diagrams for each component are a revolution volume along their orientation axes.
Figure 10 shows the 3D reflection diagrams for the same example considered in
Figure 9.
Thus, in the final expression, it can be seen that there are seven different and independent coefficients: , , , , , and k; which are necessary to obtain from experimental measurements and an optimization or adjustment method.
Limitations of the Proposed Reflection Model
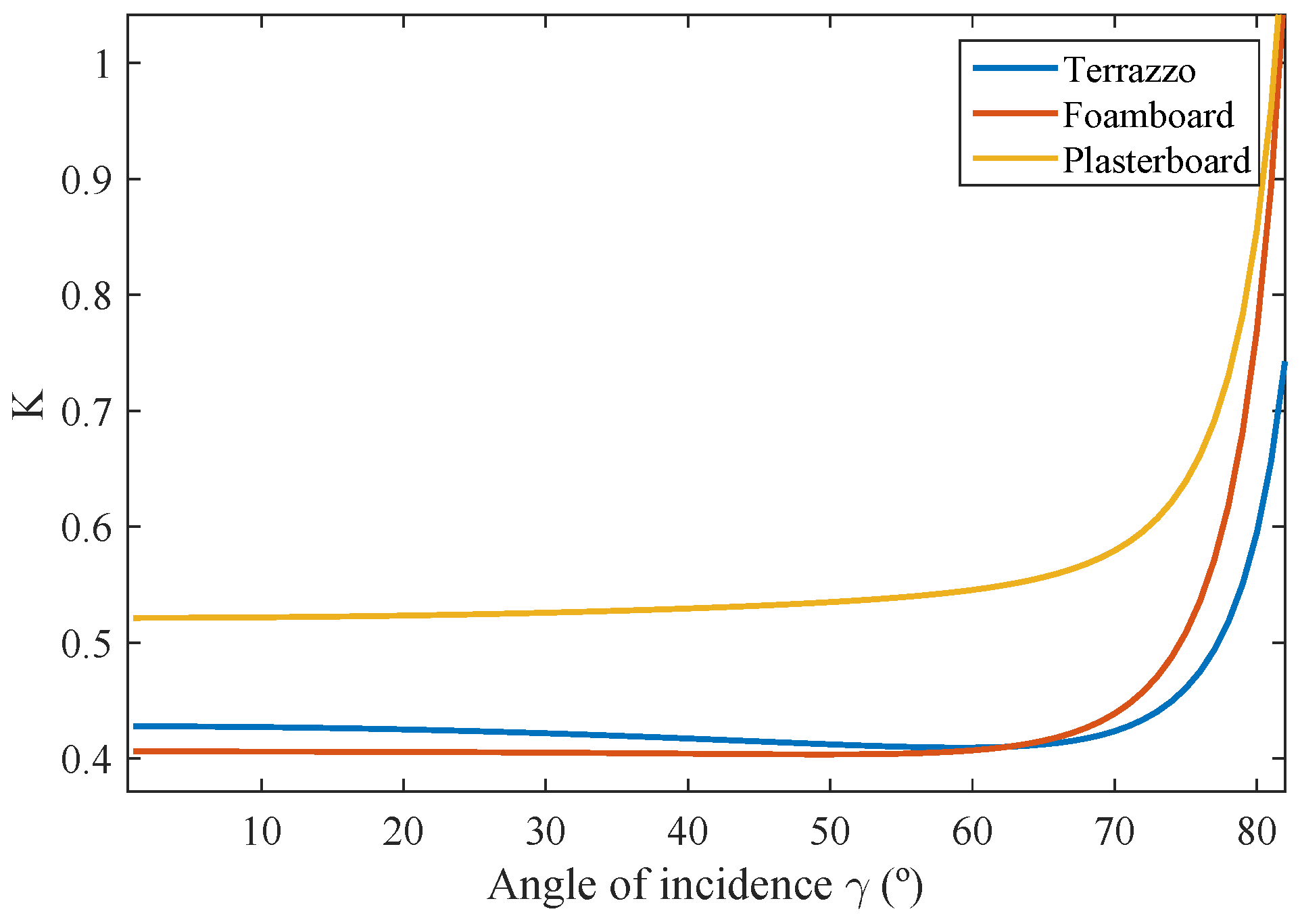
After performing the first experimental measurements, we observed that the reflection parameter
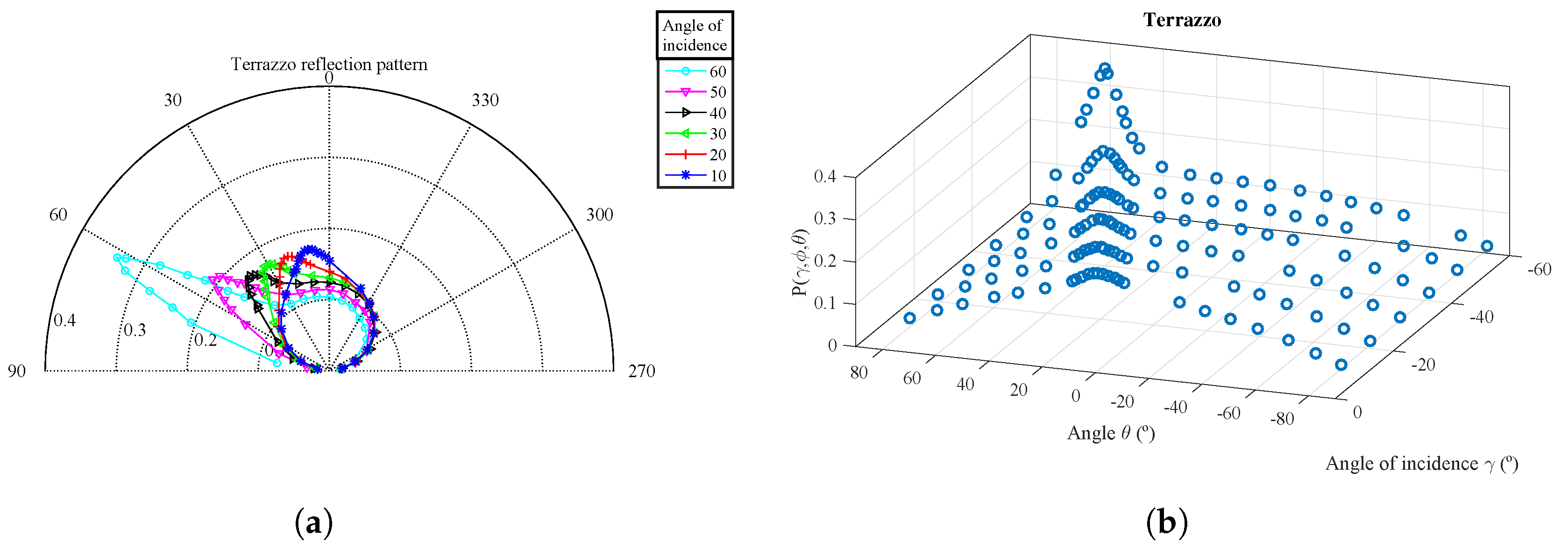
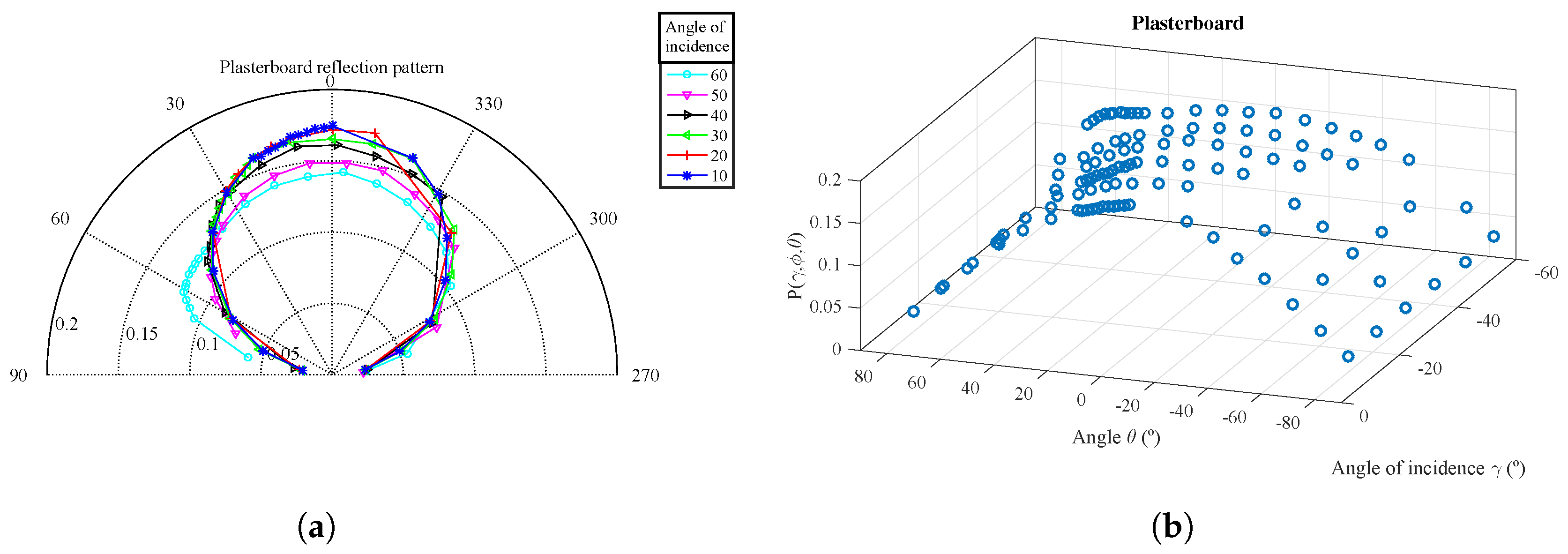
was not constant, but changed with the angle of incidence. However, for angles of incidence of less than 70 degrees, it can be approximated with great accuracy to a constant. To demonstrate this,
Figure 11 shows the
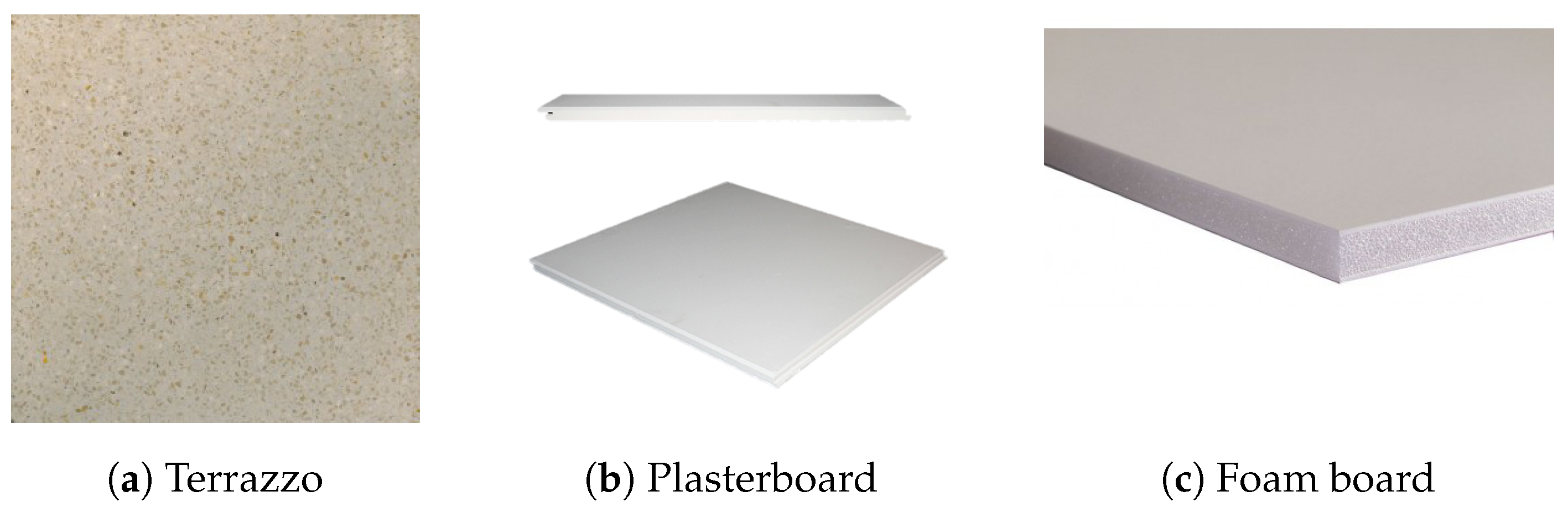
K parameter as a function of the angle of incidence for the three different materials that will be used throughout this paper: terrazzo, a foam board and a plasterboard. Experimental measurements were also performed with other materials, but these three materials are included as being representative of different types of reflection. To obtain the value of the parameter
K as a function of the angle of incidence, the fitting functions for the parameters
,
,
,
and
K were adjusted from the experimental measurements of
along angle
, computed separately for each angle of incidence.
Because the value of K is equal to , the variation in the K parameter with the angle of incidence is due solely to the reflection factor , since this is the only parameter that can vary with the angle of incidence.



 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}