
LOCALI: Calibration-Free Systematic Localization Approach for Indoor Positioning


Abstract
:1. Introduction
2. Existing Systems
2.1. Interpolation-Based Systems
2.2. Crowdsourcing-Based Systems
2.3. Sensors-Based Systems
2.4. Model-Based Systems
3. Proposed Approach
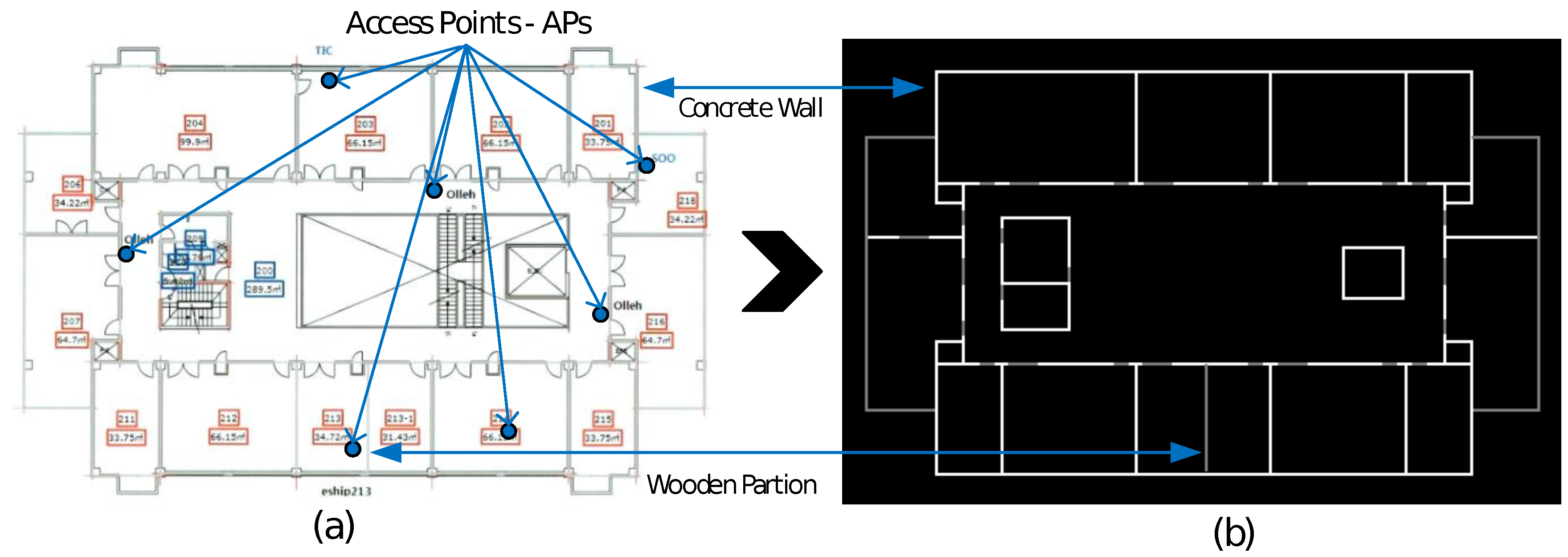
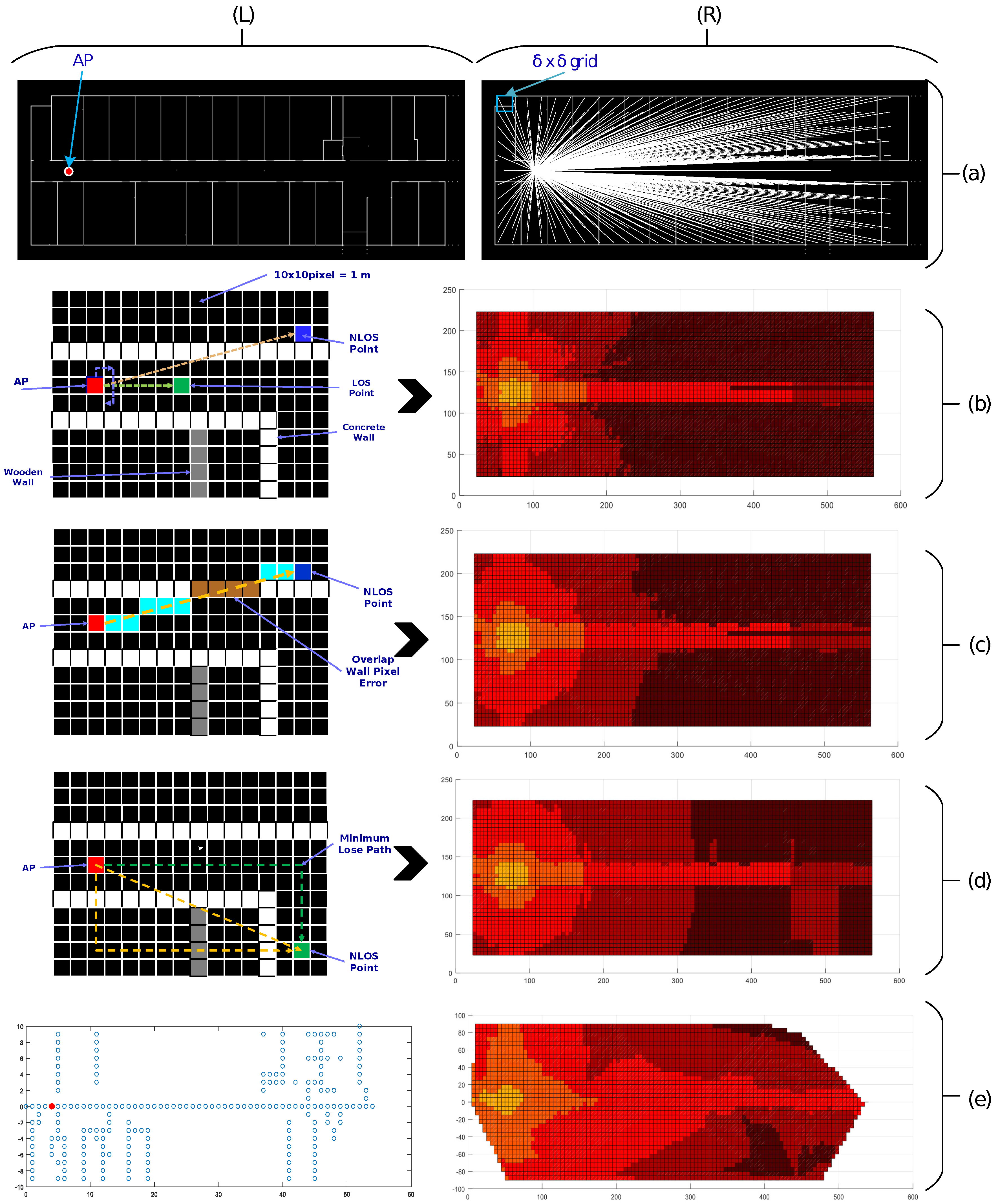
3.1. Pixel Map Tracing
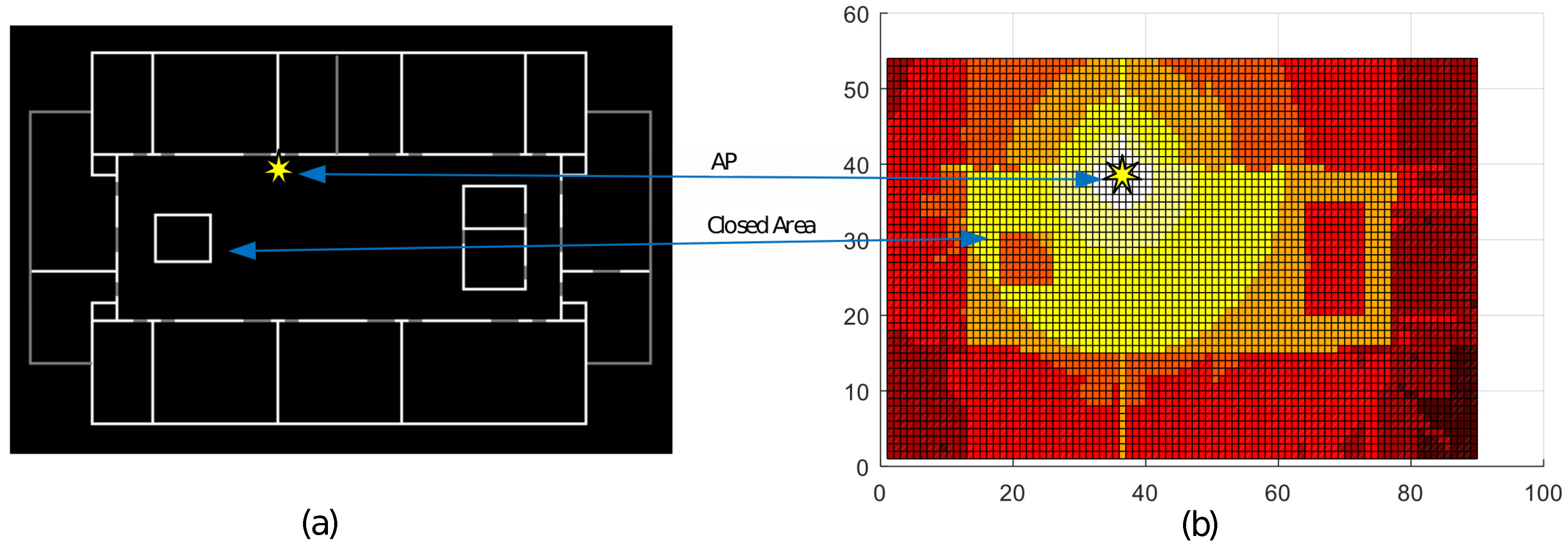
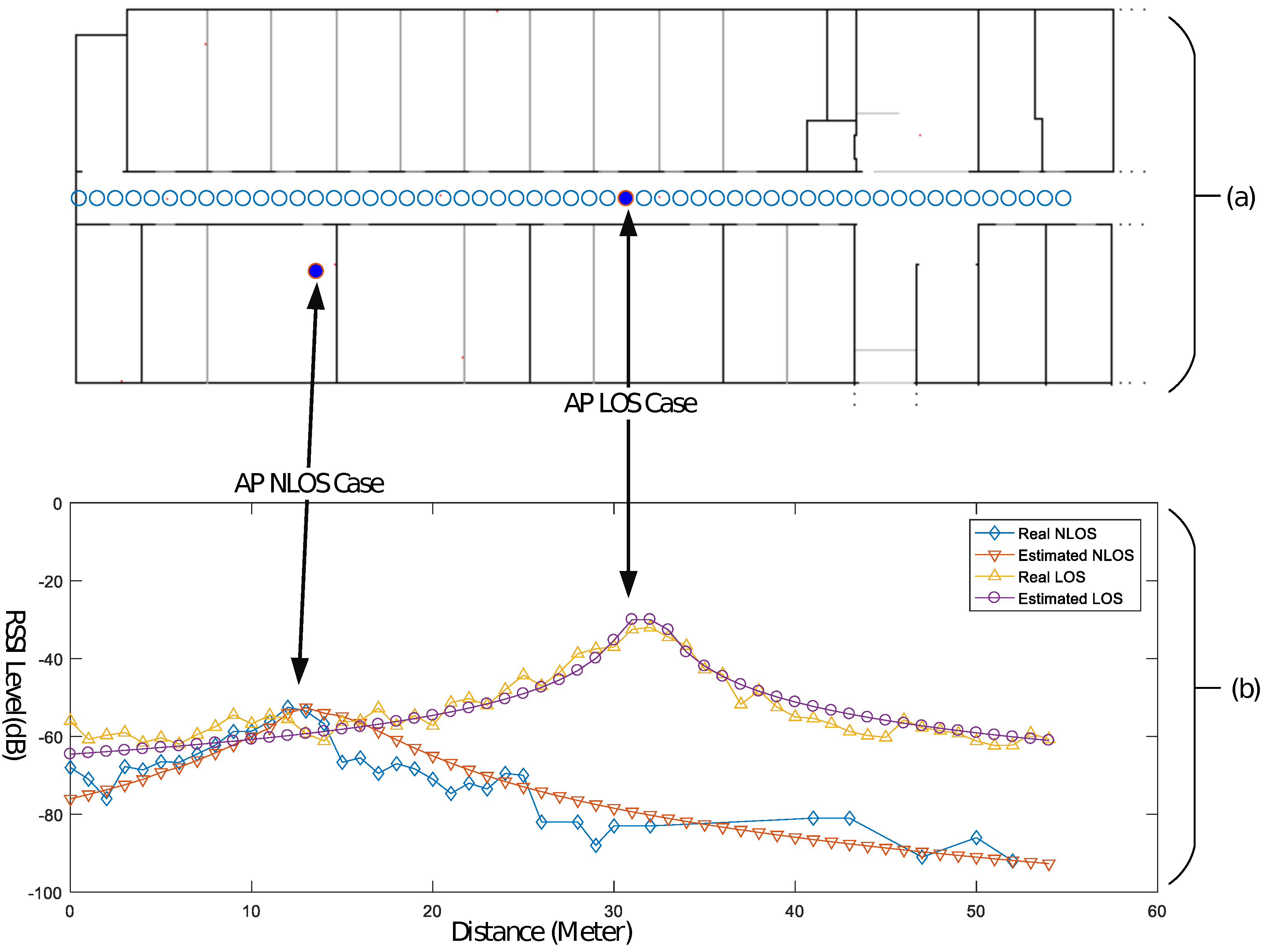
3.2. RSSI Map Generation
RSSI Estimation Model
Correction I
Correction II
| Algorithm 1 Generate RSSI Map |
|
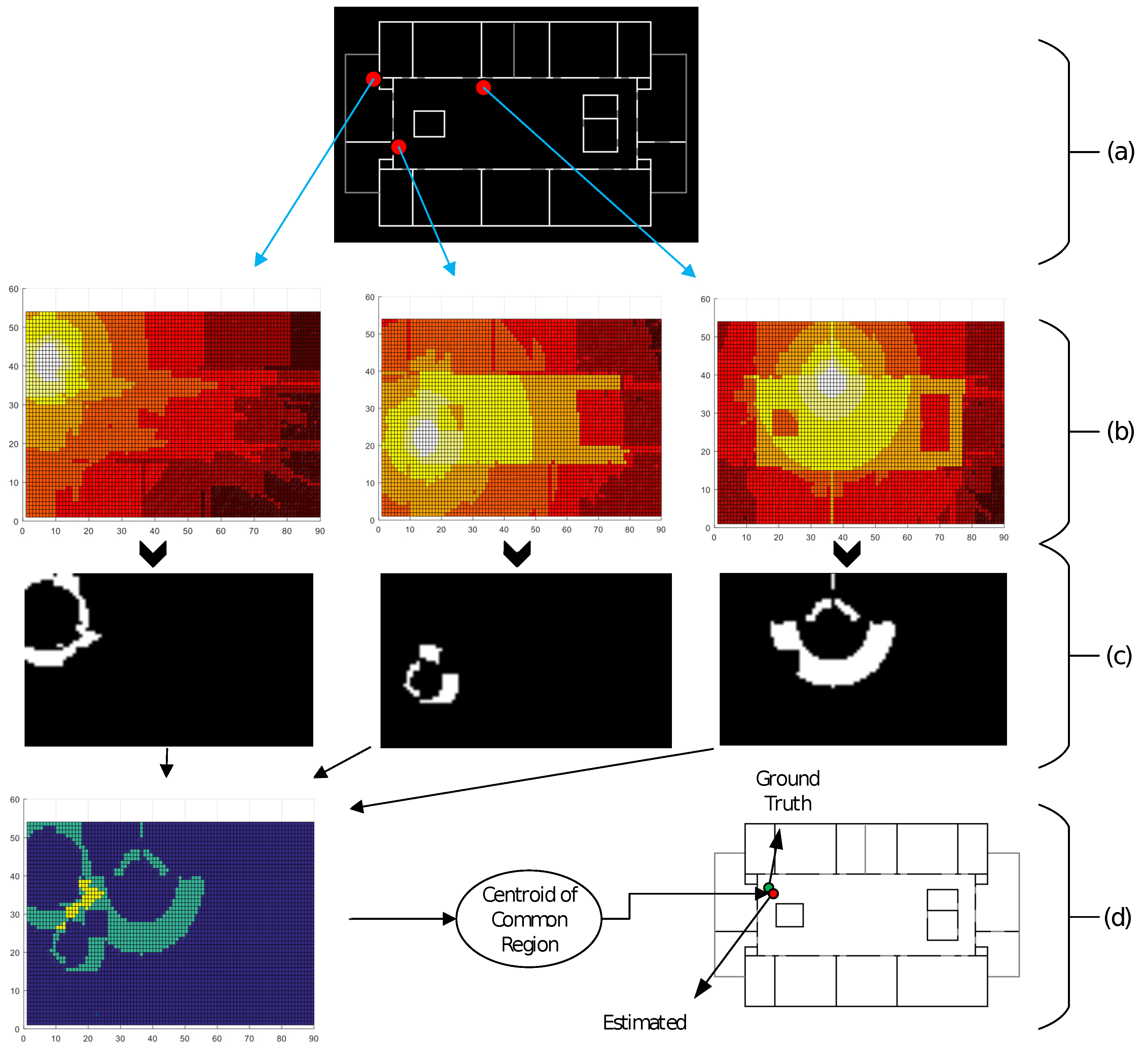
3.3. User Location Estimation
- Selection of APs for location estimation; for simplicity, we select the top three APs in the list with the strongest RSSI level.
- For each AP, we generate a binary map by applying the threshold value of the RSSI level received from a particular AP on the corresponding RSSI Map. Let us assume that we have received a list . Each RSSI Map is an matrix of RSSI levels and we mark a value of “1”, if the block has a 3 dB-difference value with the RSSI level received at the target, else it is “0”. This process gives us a binary map, as in Figure 5c. The same process applies for the remaining two selected APs, for the assessment of the RSSI map.
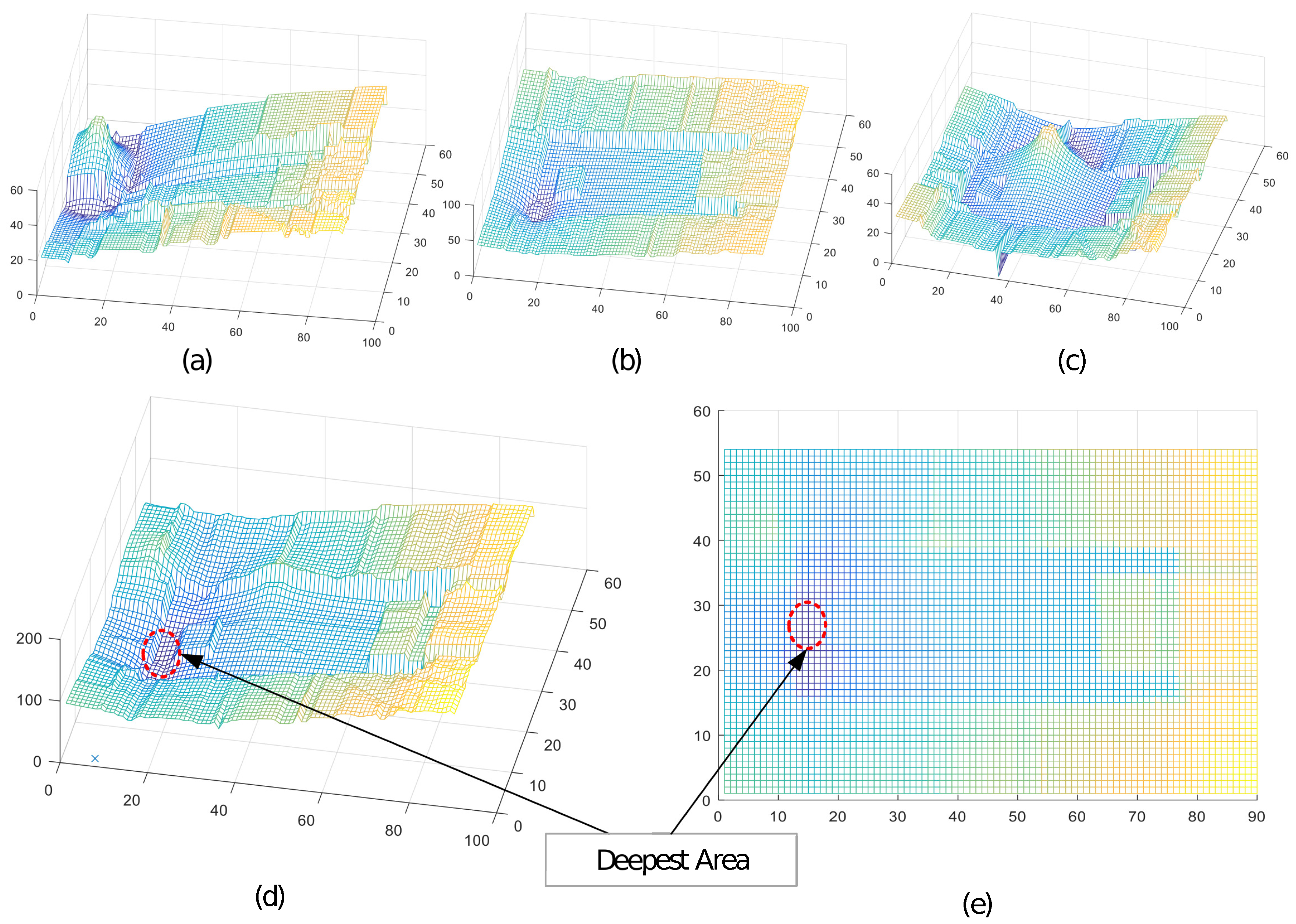
- We now have three binary maps that depict the expected region around each AP, where a target can be located. Next, we perform a simple intersection operation between the three binary maps and obtain the common region for these maps; this gives us a region, where all the points have the same values, for the three selected APs, from the received RSSI list “Z”, at the target location.
- Finally, the centroid of the common area gives us the estimated location of the target. The step-by-step implementation details of this task are listed in Algorithm 2.
| Algorithm 2 Estimate Target Location |
|
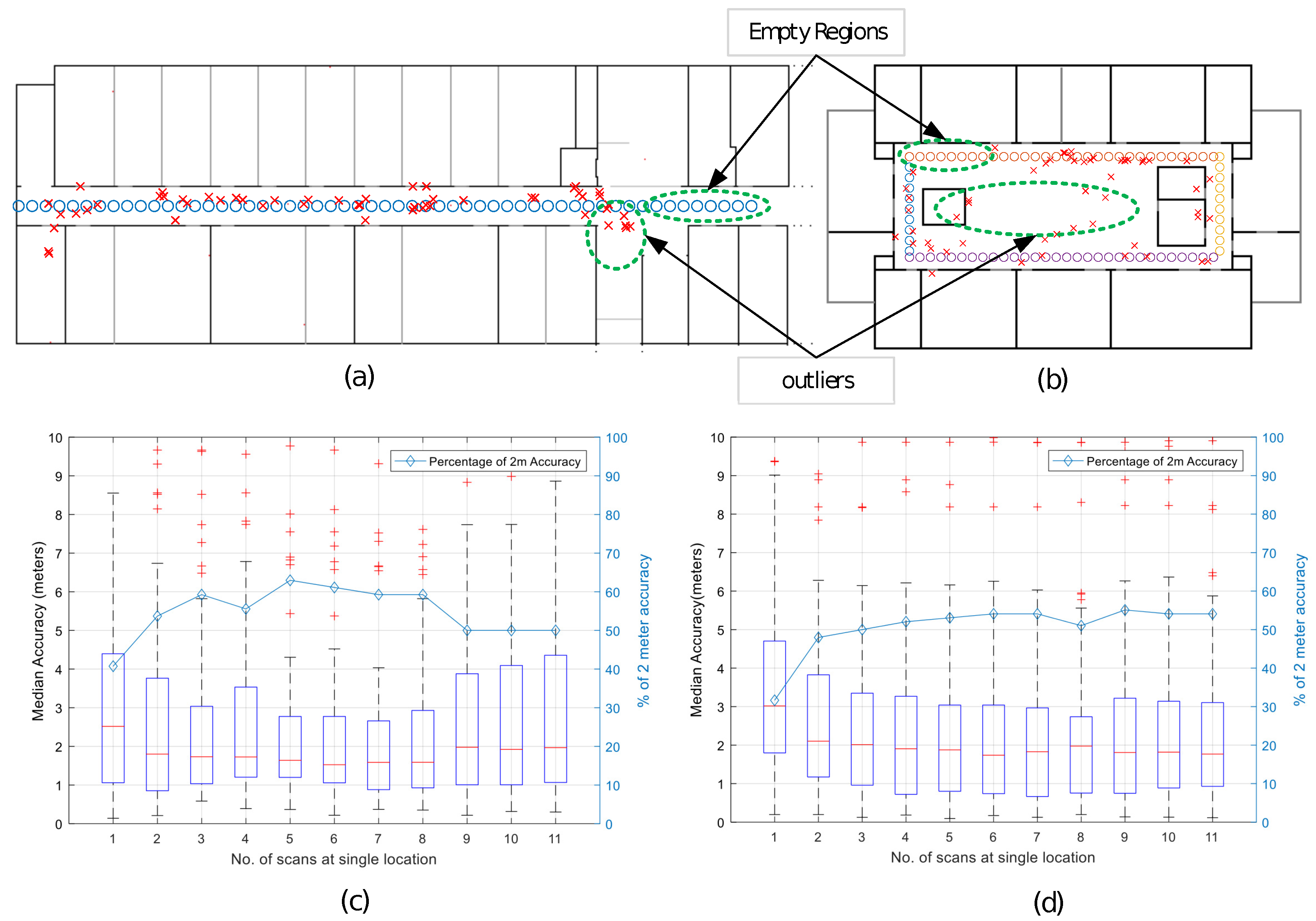
4. Experiment Setup
5. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ni, M.L.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000. [Google Scholar]
- Feldmann, S.; Kyamakya, K.; Zapater, A.; Lue, Z. An Indoor Bluetooth-Based Positioning System: Concept, Implementation and Experimental Evaluation. In Proceedings of the International Conference onWireless Networks, Las Vegas, NV, USA, 23–26 June 2003. [Google Scholar]
- LaMarca, A.; Chawathe, Y.; Consolvo, S.; Hightower, J.; Smith, I. Place lab: Device positioning using radio beacons in the wild. In Proceedings of the International Conference on Pervasive Computing, Munich, Germany, 8–13 May 2005. [Google Scholar]
- Mahfouz, M.R.; Zhang, C.; Merkl, B.C.; Kuhn, M.J.; Fathy, A.E. Investigation of high-accuracy indoor 3-D positioning using UWB technology. IEEE Trans. Microw. Theory Tech. 2008, 56, 1316–1330. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Yoshino, M.; Haruyama, S.; Nakagawa, M. High-accuracy positioning system using visible LED lights and image sensor. In Proceedings of the 2008 IEEE Radio and Wireless Symposium, Orlando, FL, USA, 22–24 January 2008. [Google Scholar]
- Se, S.; Lowe, D.G.; Little, J.J. Vision-based global localization and mapping for mobile robots. IEEE Trans. Robot. 2005, 21, 364–375. [Google Scholar] [CrossRef]
- Mulloni, A.; Wagner, D.; Barakonyi, I. Indoor positioning and navigation with camera phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- A Python Implementation of Chan’s TDoA Algorithm for Ultrasonic Positioning and Tracking. Stock, V2-Lab Rotterdam. Available online: https://trac.v2.nl/export/6400/andres/Documentation/TDOA/Ultrasonic_Tracking.pdf (accessed on 15 March 2017).
- Hossain, A.K.M.M.; Soh, W.-S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Seidel, S.Y.; Rappaport, T.S. 914 MHz path loss prediction models for indoor wireless communications in multifloored buildings. IEEE Trans. Antennas Propag. 1992, 40, 207–217. [Google Scholar] [CrossRef]
- Husen, M.N.; Lee, S. Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting. Sensors 2016, 16, 1898. [Google Scholar] [CrossRef] [PubMed]
- Kaemarungsi, K.; Krishnamurthy, P. Modeling of indoor positioning systems based on location fingerprinting. In Proceedings of the Twenty-third AnnualJoint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004. [Google Scholar]
- Chung, J.; Donahoe, M.; Schmandt, C.; Razavai, P. Indoor location sensing using geo-magnetism. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, Bethesda, ML, USA, 28 June–1 July 2011. [Google Scholar]
- Narzullaev, A.; Park, Y. Novel calibration algorithm for received signal strength based indoor real-time locating systems. AEU-Int. J. Electron. Commun. 2013, 67, 637–644. [Google Scholar] [CrossRef]
- Gwon, Y.; Jain, R. Error characteristics and calibration-free techniques for wireless lan-based location estimation. In Proceedings of the 2nd ACM MobiWac, Philadelphia, PA, USA, 1 October 2004; pp. 2–9. [Google Scholar]
- Lim, H.; Kung, L.-C.; Hou, J.C.; Luo, H. Zero-configuration indoor localization over IEEE 802.11 wireless infrastructure. Wirel. Netw. 2010, 16, 405–420. [Google Scholar] [CrossRef]
- Yang, S.; Dessai, P.; Verma, M. FreeLoc: Calibration-free crowdsourced indoor localization. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013. [Google Scholar]
- Chang, Q.; Li, Q.; Shi, Z.; Chen, W.; Wang, W. Scalable Indoor Localization via Mobile Crowdsourcing and Gaussian Process. Sensors 2016, 16, 381. [Google Scholar] [CrossRef] [PubMed]
- Park, J.-G.; Charrow, B.; Curtis, D. Growing an organic indoor location system. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010. [Google Scholar]
- Chintalapudi, K.; Iyer, A.P.; Padmanabhan, V.N. Indoor localization without the pain. In Proceedings of the 16th Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010. [Google Scholar]
- Shen, G.; Zhuo, C.; Zhang, P. Walkie-Markie: Indoor pathway mapping made easy. In Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation, Lombard, IL, USA, 2–5 April 2013. [Google Scholar]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q. ALIMC: Activity landmark-based indoor mapping via crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2774–2785. [Google Scholar] [CrossRef]
- Khoshelham, K.; Zlatanova, S. Sensors for Indoor Mapping and Navigation. Sensors 2016, 16, 655. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zou, H.; Jiang, H. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Hilsenbeck, S.; Bobko, D.; Schroth, G. Graph-based data fusion of pedometer and WiFi measurements for mobile indoor positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014. [Google Scholar]
- Li, W.W.-L.; Iltis, R.A.; Win, M.Z. A smartphone localization algorithm using RSSI and inertial sensor measurement fusion. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013. [Google Scholar]
- Deng, Z.-A.; Hu, Y.; Yu, J. Extended Kalman filter for real time indoor localization by fusing WiFi and smartphone inertial sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Liu, Y. WILL: Wireless indoor localization without site survey. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 25–29 June 2012. [Google Scholar]
- Jiao, J.; Li, F.; Deng, Z. A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN. Sensors 2017, 17, 704. [Google Scholar] [CrossRef] [PubMed]
- Knauth, S.; Ortega, A.A.B.; Dastageeri, H.; Griese, T.; Tran, Y. Towards Smart Watch Position Estimation Employing RSSI based Probability Maps; HFU: Furtwagen, Germany, 2014. [Google Scholar]
- Bruno, L.; Addesso, P.; Restaino, R. Indoor positioning in wireless local area networks with online path-loss parameter estimation. Sci. World J. 2014, 2014, 986714. [Google Scholar] [CrossRef] [PubMed]
- Bose, A.; Chuan, H.F. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 6th International Conference on the Information, Communications & Signal Processing, Singapore, 10–13 December 2007. [Google Scholar]
- Santos, J.M.; Portugal, D.; Rocha, R.P. An evaluation of 2D SLAM techniques available in robot operating system. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013. [Google Scholar]
- Series, P. Propagation Data and Prediction Methods for the Planning of Indoor Radio Communication Systems and the Radio Local Area Networks in the Frequency Range 900 MHz to 100 GHz; ICU: Genève, Switzerland, 2012. [Google Scholar]
- Wang, H.; Lenz, H.; Szabo, A. Enhancing the map usage for indoor location-aware systems. In Proceedings of the International Conference on Human-Computer Interaction, Beijing, China, 22–27 July 2007. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Techniques | Proposed | CBIPA [34] | Probability | Online | PPLM [37] | |
|---|---|---|---|---|---|---|
| Props. | Technique | Maps [35] | PLPE [36] | |||
| LOS/NLOS Assessment | Automatic | No | No | No | Manual | |
| Obstacle count | Yes | No | No | No | No | |
| Coverage | Both | Both | LOS | LOS | Case Level | |
| (LOS/NLOS) | (LOS or NLOS) | |||||
| Positioning | Map | Turbo RSSI | Map | Particle | Trilateration | |
| Algorithm | Overlapping | model | Overlapping | Filter | ||
| Active User Input | No | Yes | No | No | Yes | |
| Interpolation | No | No | No | Yes | No | |
| Special H/W Requirement | No | Yes(Camera) | Yes | No | No | |
| Building Type | Area (m2) | AP Count | delta (δ) | Time (s) | Maps File Size (Kb) |
|---|---|---|---|---|---|
| Hallway | 20 × 54 | 21 | 5 | 1001 | 630 |
| 10 | 267 | 172 | |||
| Artium | 27 × 45 | 07 | 5 | 360 | 240 |
| 10 | 103 | 60 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, M.U.; Hur, S.; Park, Y. LOCALI: Calibration-Free Systematic Localization Approach for Indoor Positioning. Sensors 2017, 17, 1213. https://doi.org/10.3390/s17061213
Ali MU, Hur S, Park Y. LOCALI: Calibration-Free Systematic Localization Approach for Indoor Positioning. Sensors. 2017; 17(6):1213. https://doi.org/10.3390/s17061213
Chicago/Turabian StyleAli, Muhammad Usman, Soojung Hur, and Yongwan Park. 2017. "LOCALI: Calibration-Free Systematic Localization Approach for Indoor Positioning" Sensors 17, no. 6: 1213. https://doi.org/10.3390/s17061213