An Improved Compressive Sensing and Received Signal Strength-Based Target Localization Algorithm with Unknown Target Population for Wireless Local Area Networks


Abstract
:1. Introduction
2. Related Work
3. Assumptions, Measurement Model and Motivations
3.1. Assumptions
3.2. Measurement Model
3.3. Motivations
- (1)
- The number of grids in a location area plays a significant role in target position estimation. Small number of grids will result in a larger position estimation error due to the large dimensions of a grid when treating the center of the grid as target position. Dividing the location area into smaller grids would improve position accuracy, but this would require more APs according to the CS theory, which may not be feasible in practice. Also, larger number of grids will lead to higher computational complexity. Therefore, this conflict should be handled in the development of the positioning algorithm.
- (2)
- To employ the CS theory, it is necessary to have knowledge of the target population [39]. However, this assumption would typically not be true in reality. Thus, it is useful to develop an enhanced CS-based positioning algorithm without any prior knowledge of target population.
- (3)
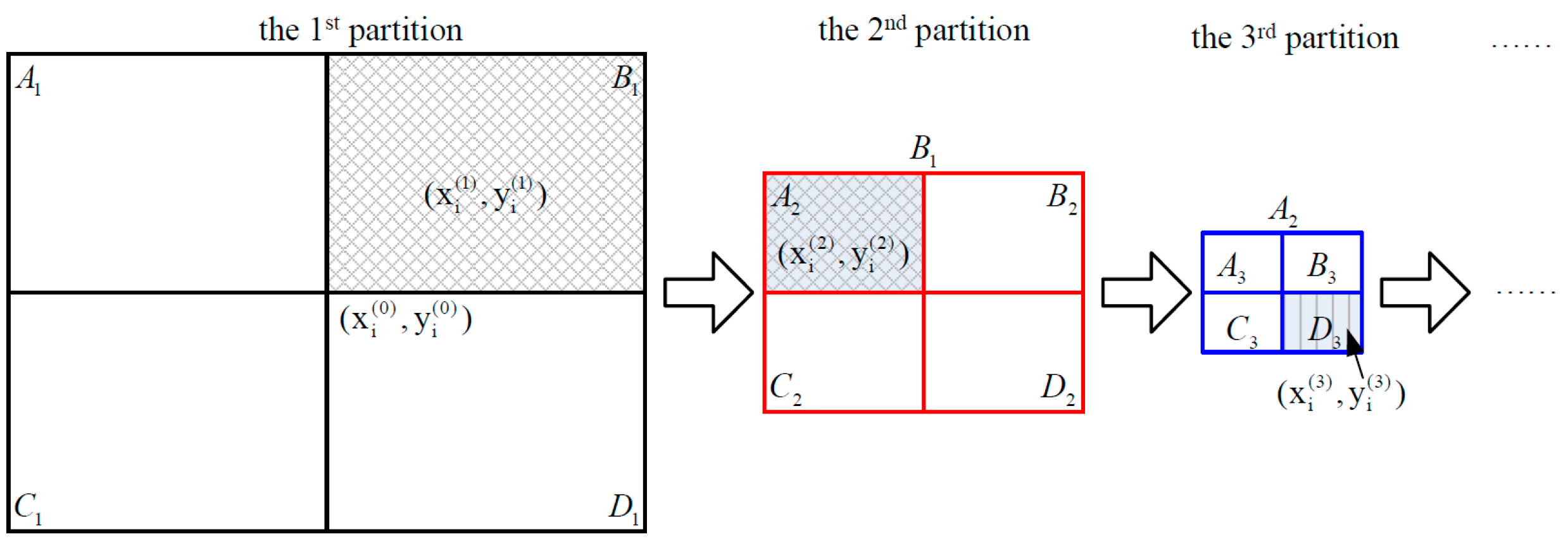
- As mentioned earlier, regardless of the grid size the center of the grid is usually chosen as the target position in the existing algorithms. However, the target can be at any place within the grid and such a selection may result in a considerable error especially when the dimensions of the grid are relatively large. Hence, it is important to develop methods to refine target positions especially when high accuracy position information is required. To cope with the above issues, a new two-phase CS-based positioning algorithm is proposed as described in the following section.
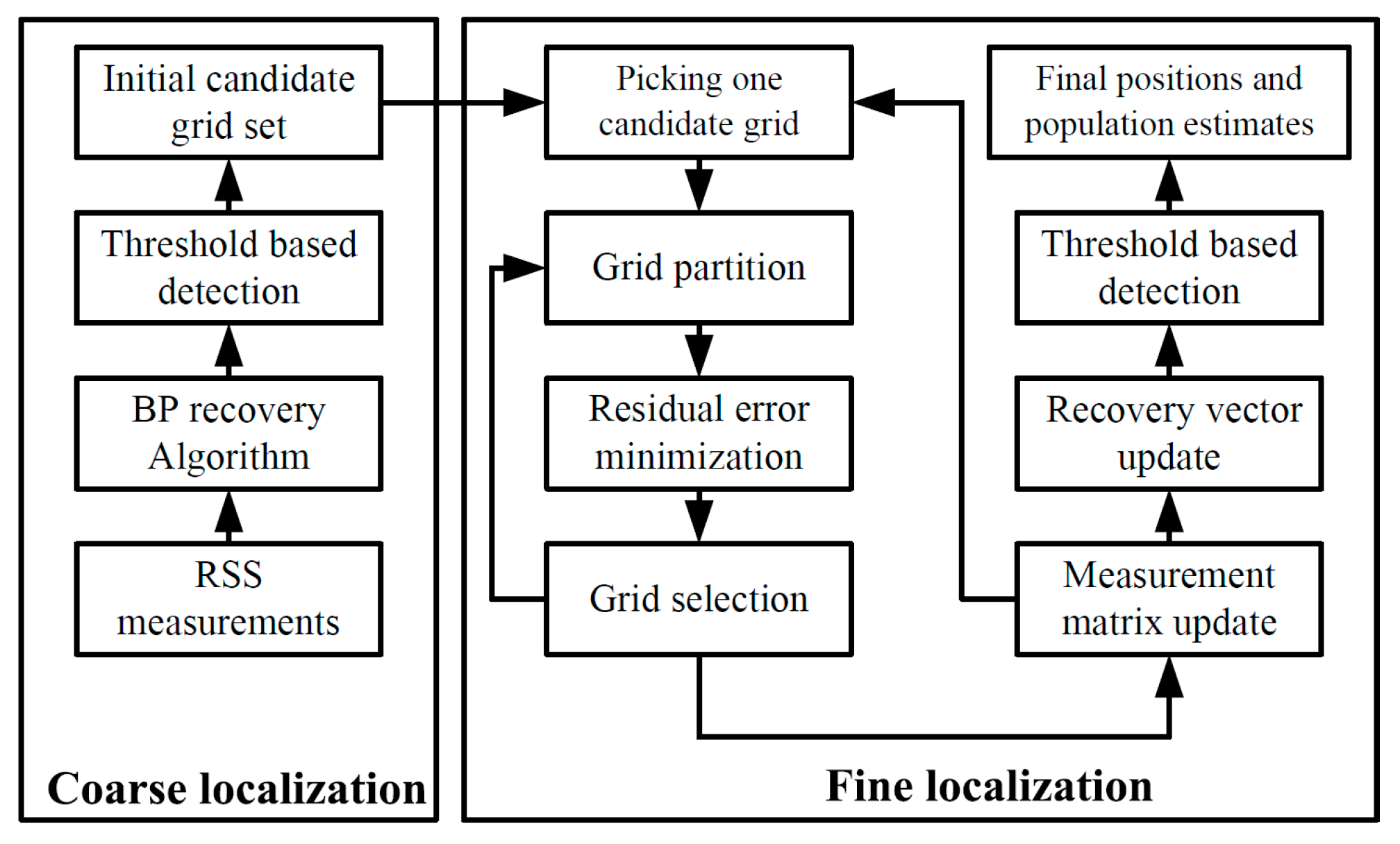
4. Proposed CS-Based Positioning Algorithm
4.1. Coarse Localization Phase
- (1)
- A pre-defined threshold is first determined such as based on conducting extensive simulations and data analysis. Certainly it would be useful to investigate on how to choose the threshold theoretically by allowing an acceptable false alarm probability in the future.
- (2)
- If , the corresponding grids are assumed to hold the targets and the centers of the chosen grids are assumed to be the initial target’s position estimation. Their grid indexes are used to form the candidate grid index set .
- (3)
- If , the corresponding grids are assumed not to have any target so that they are excluded from further processing.
4.2. Fine Localization Phase
4.3. Computational Complexity Analysis
5. Simulation Results
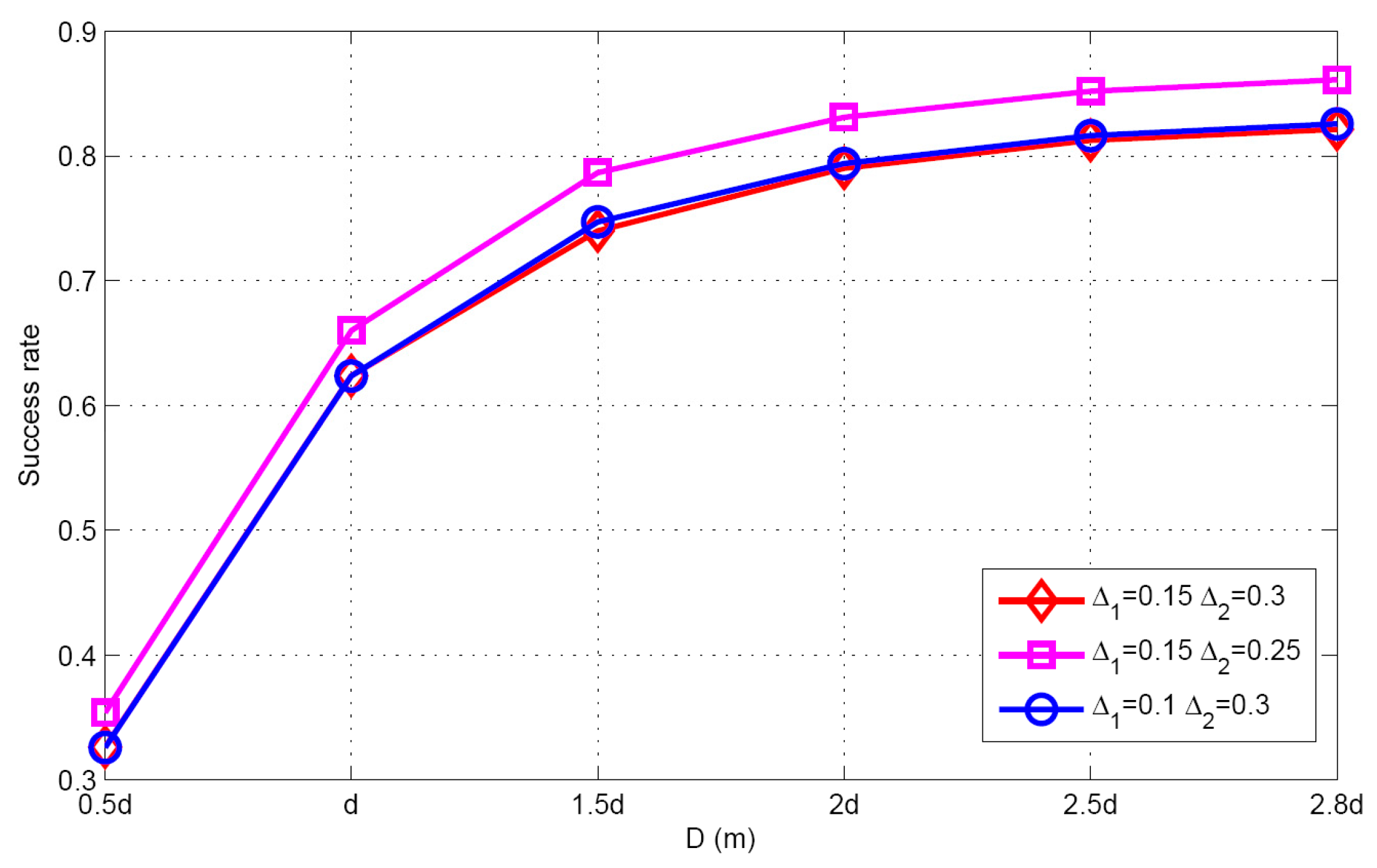
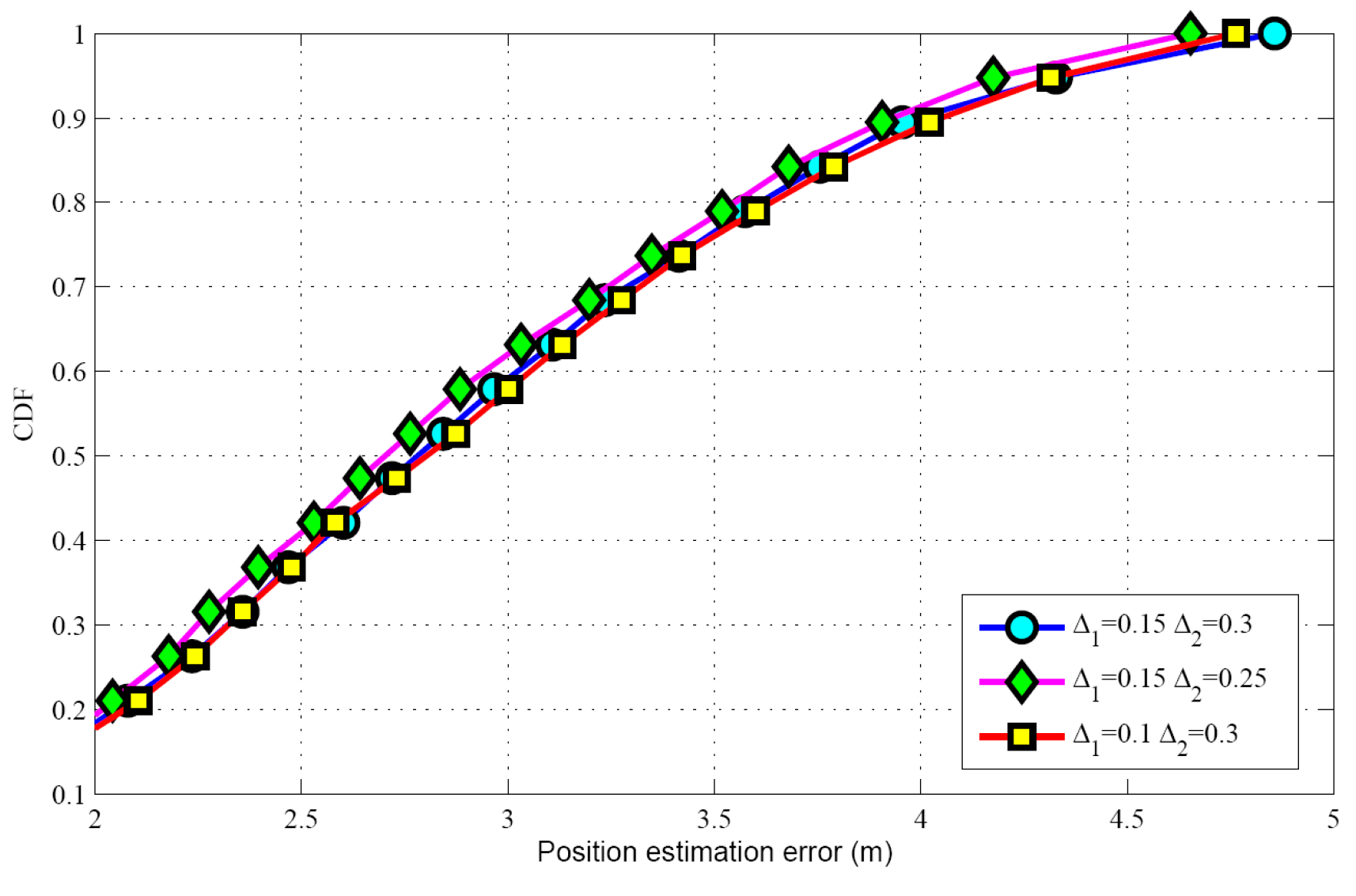
5.1. Effect of Parameter Selection
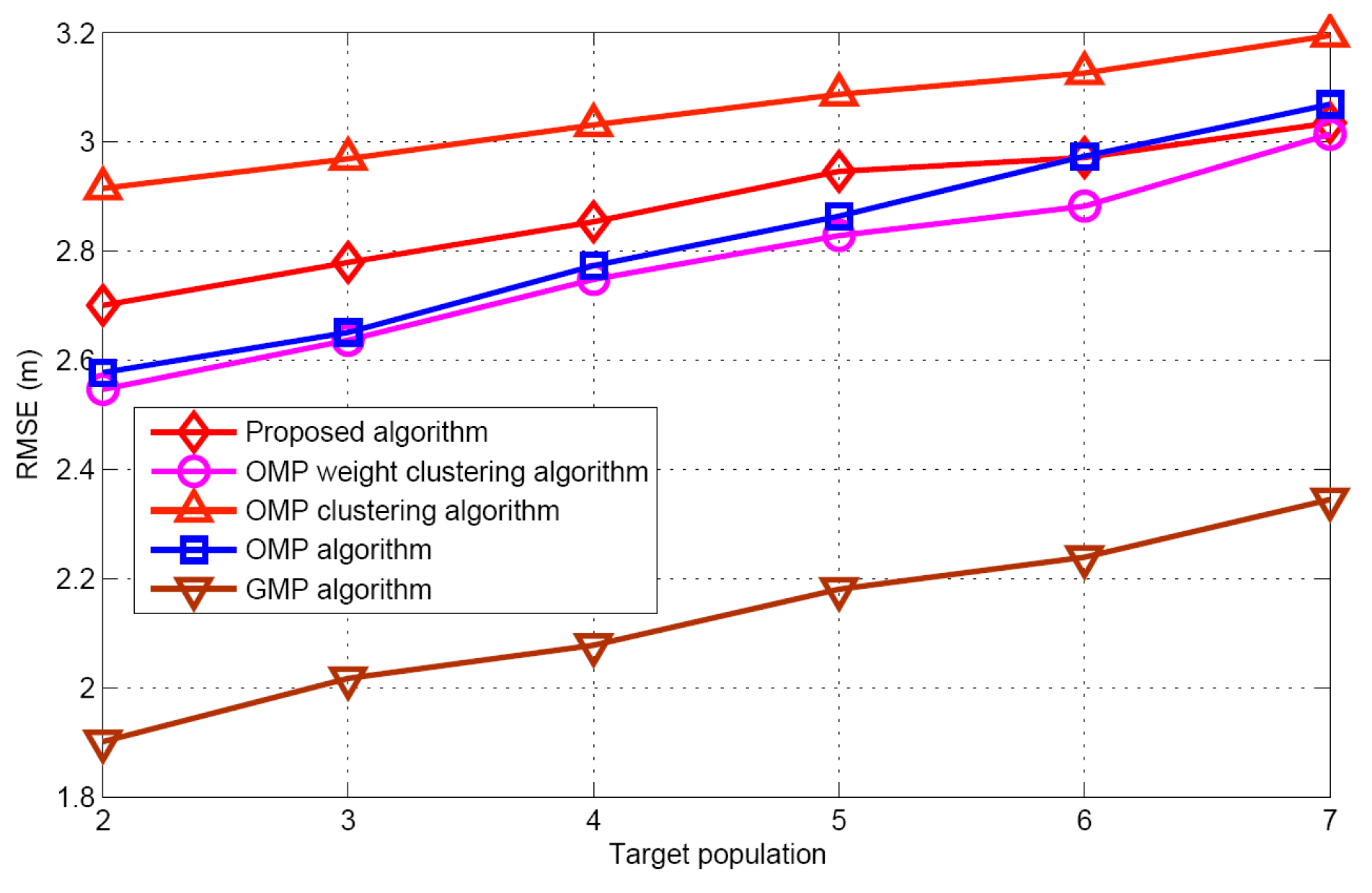
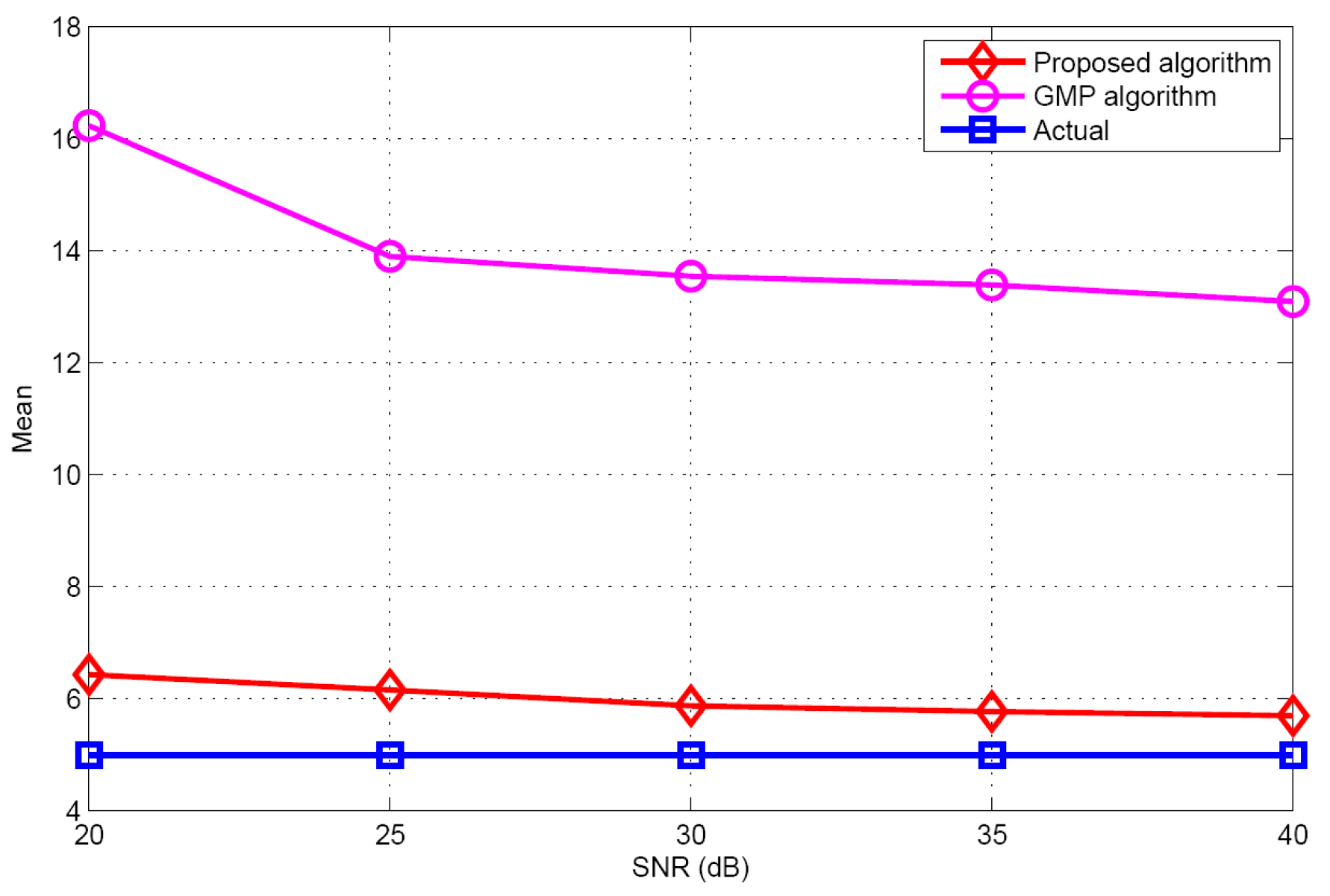
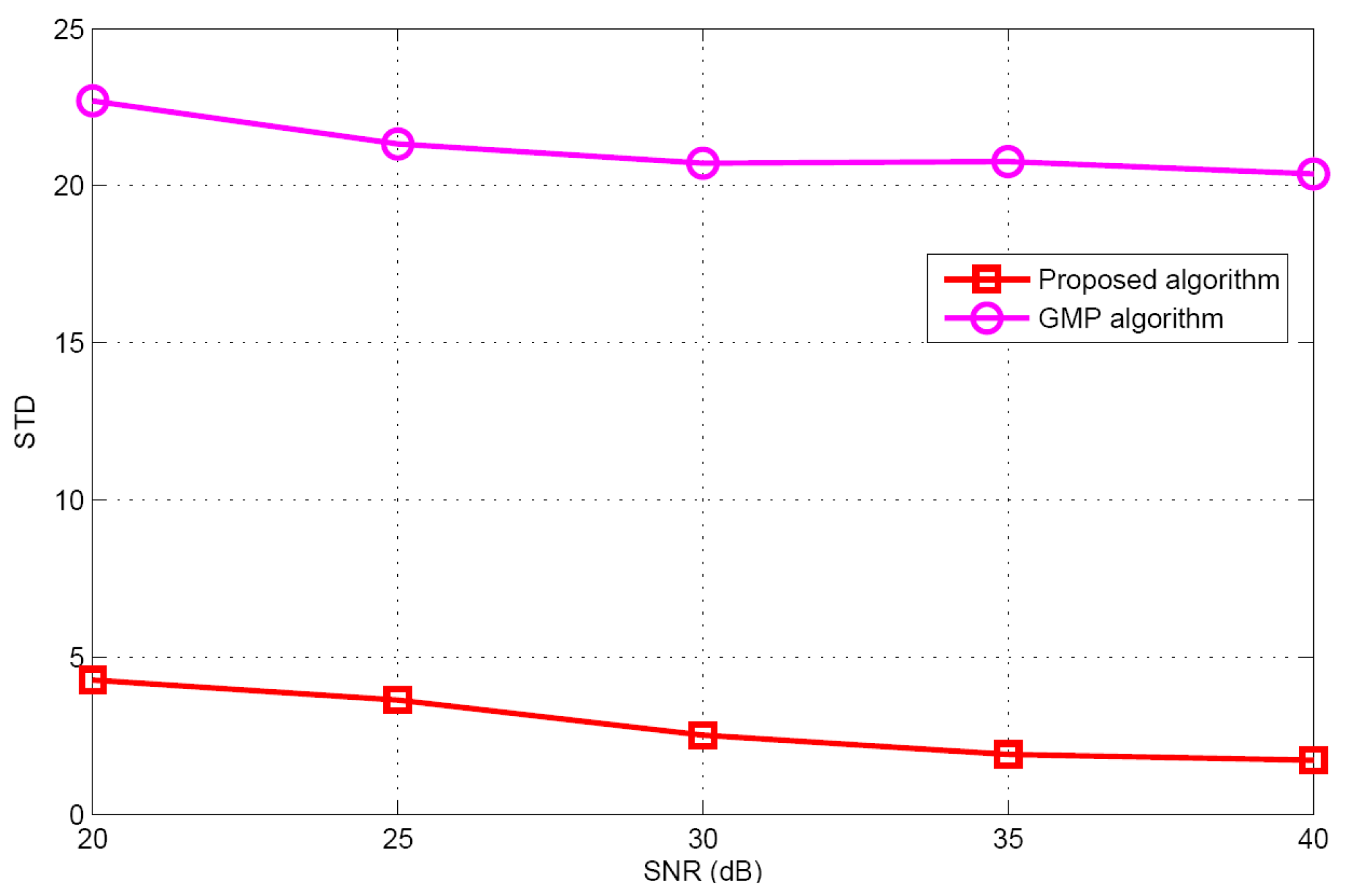
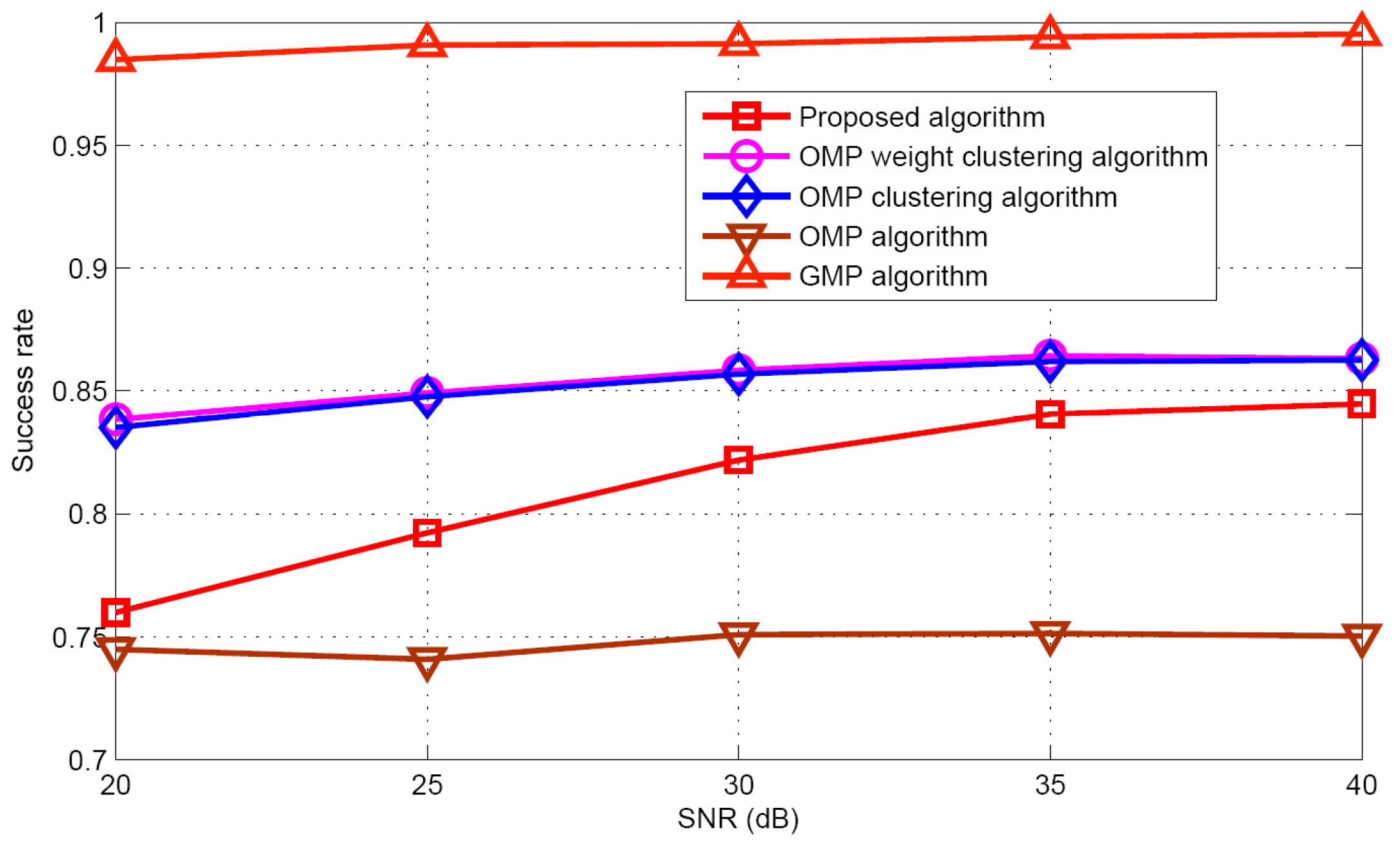
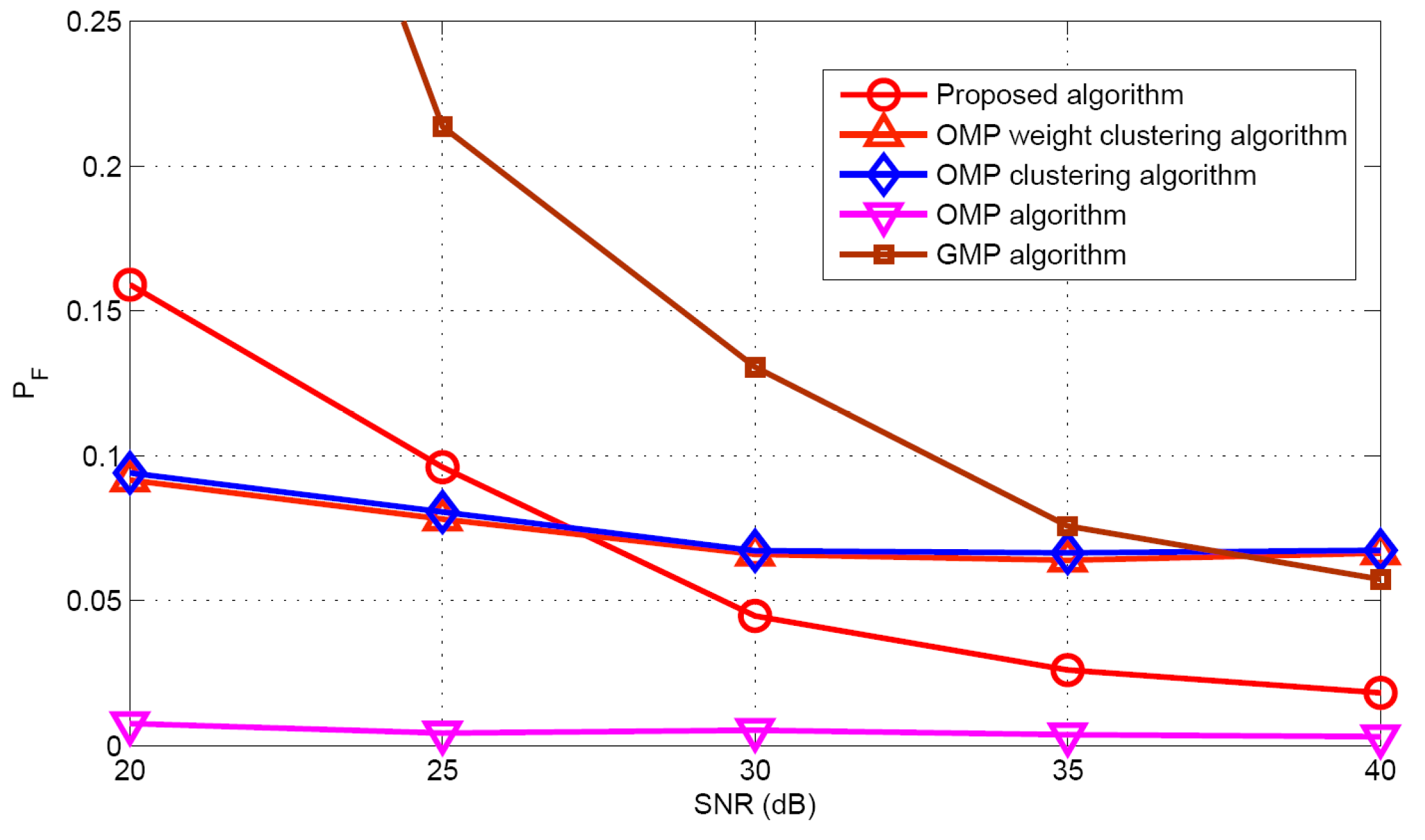
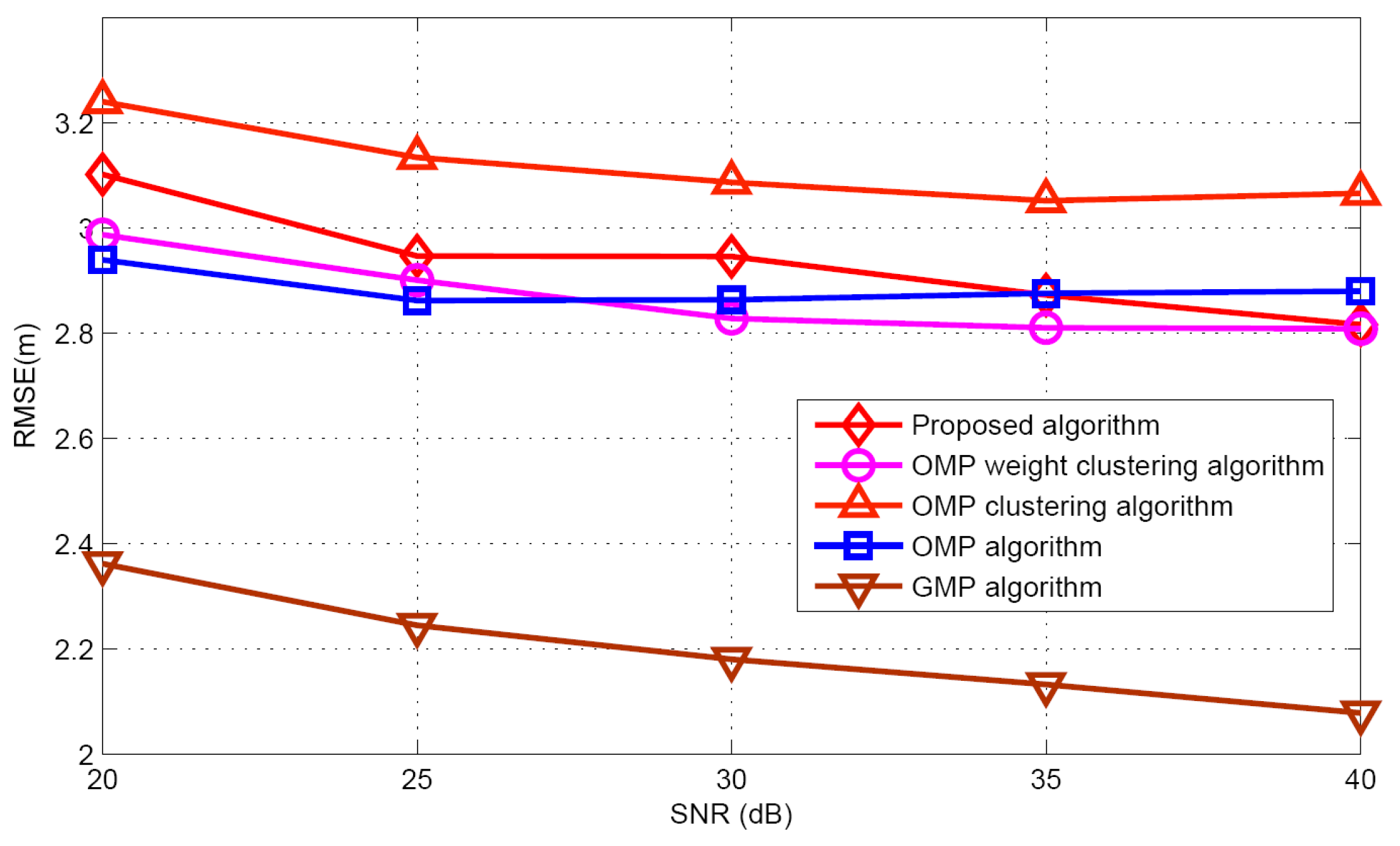
5.2. Performance Comparison
5.2.1. SSF Condition
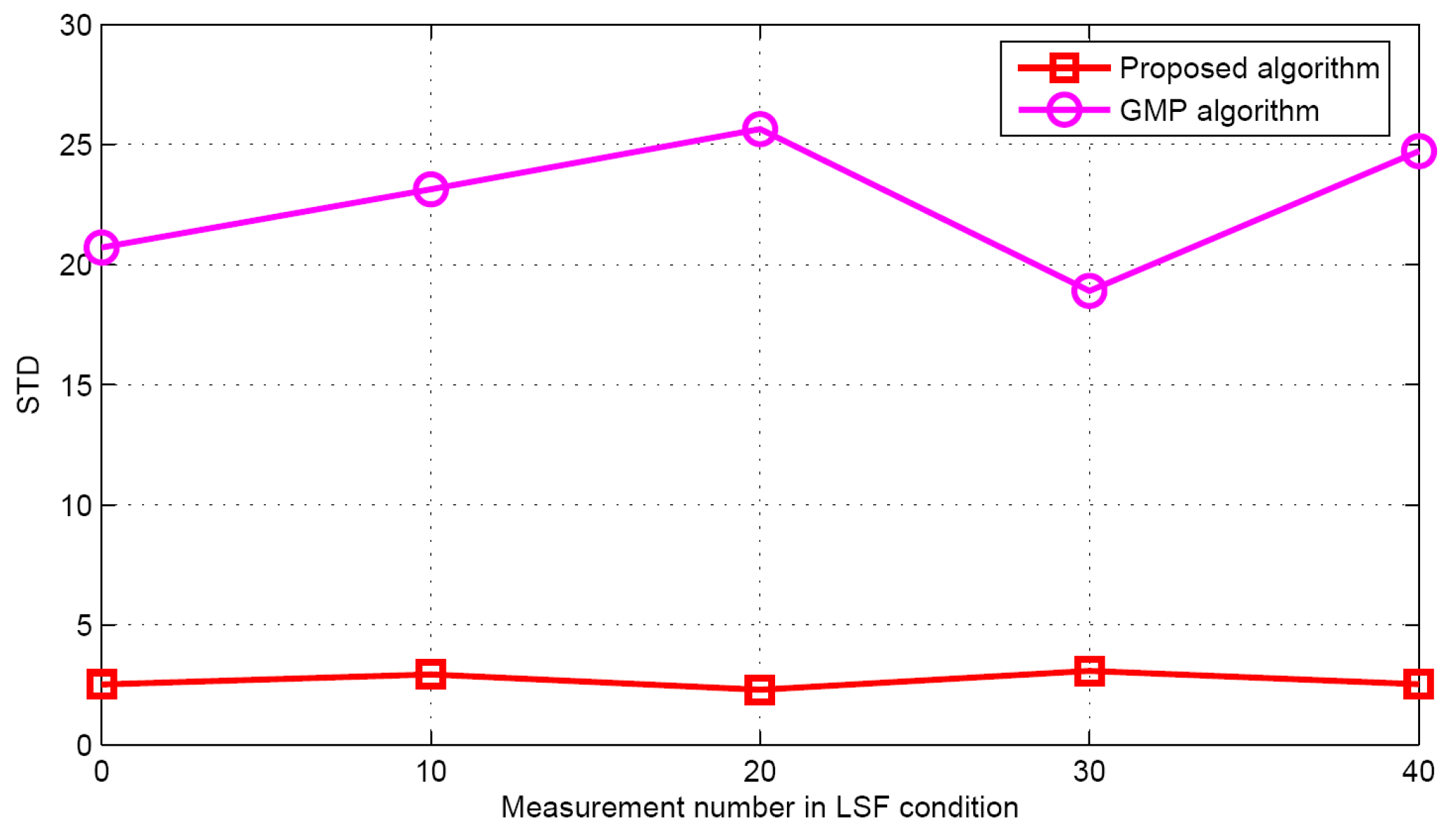
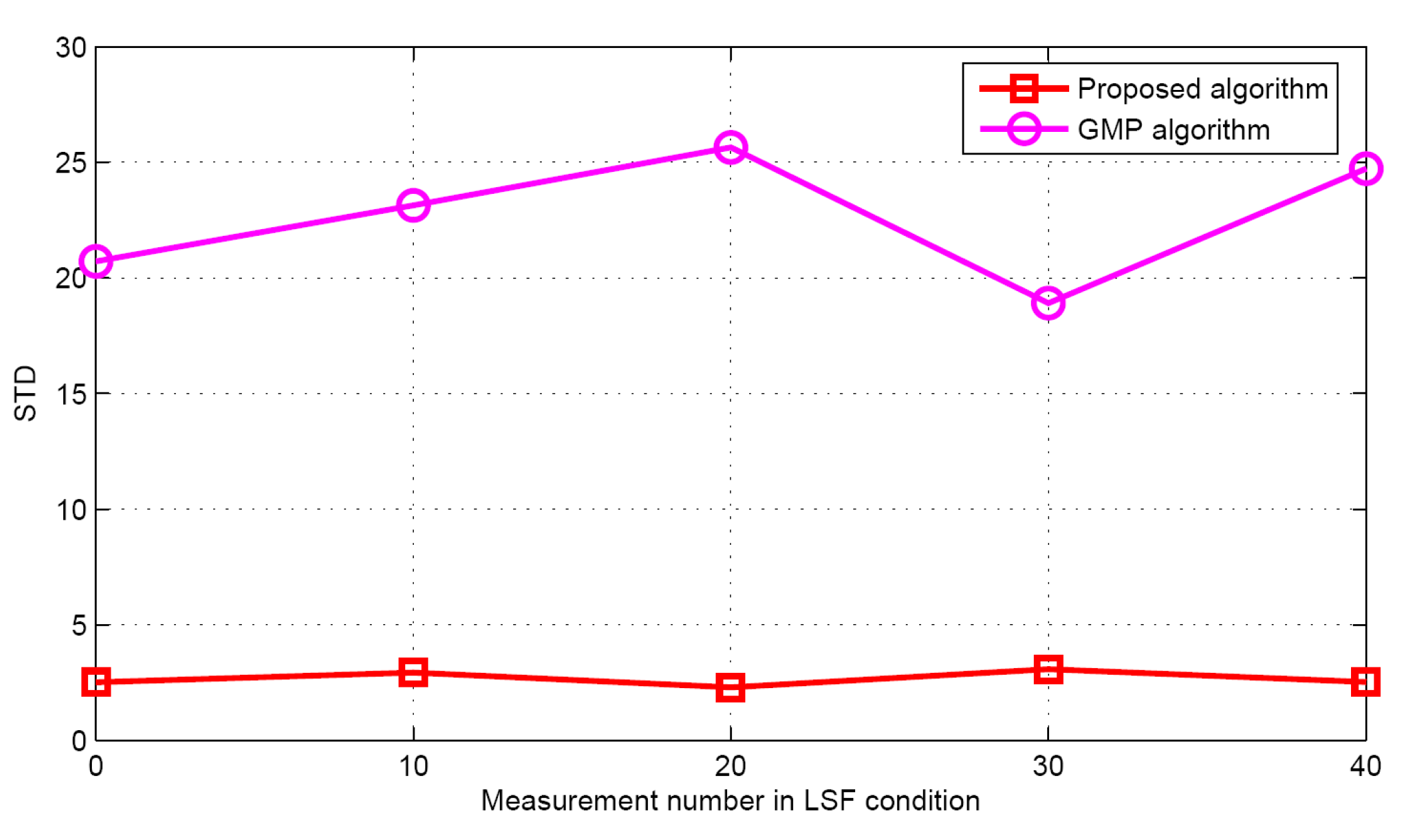
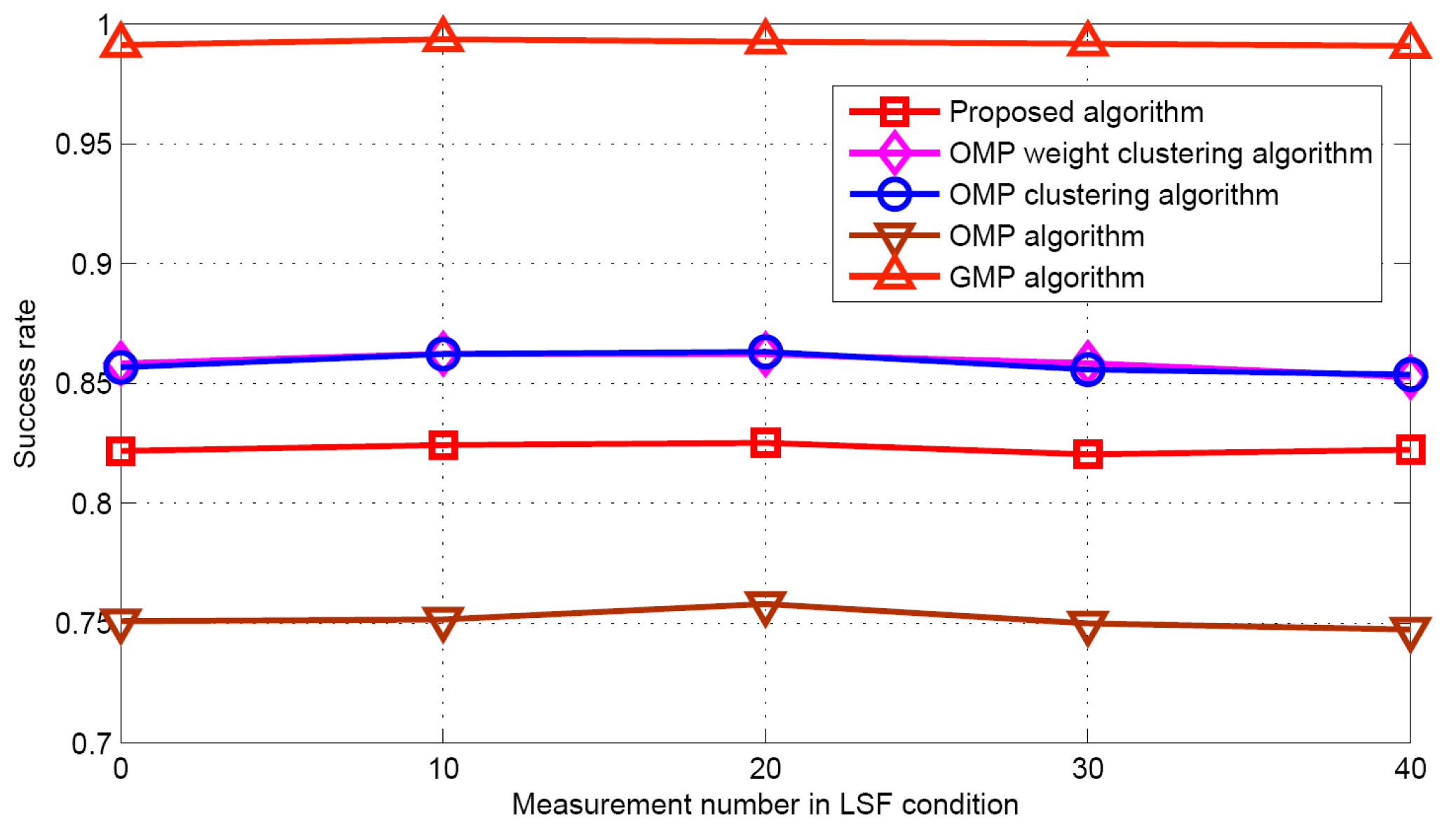
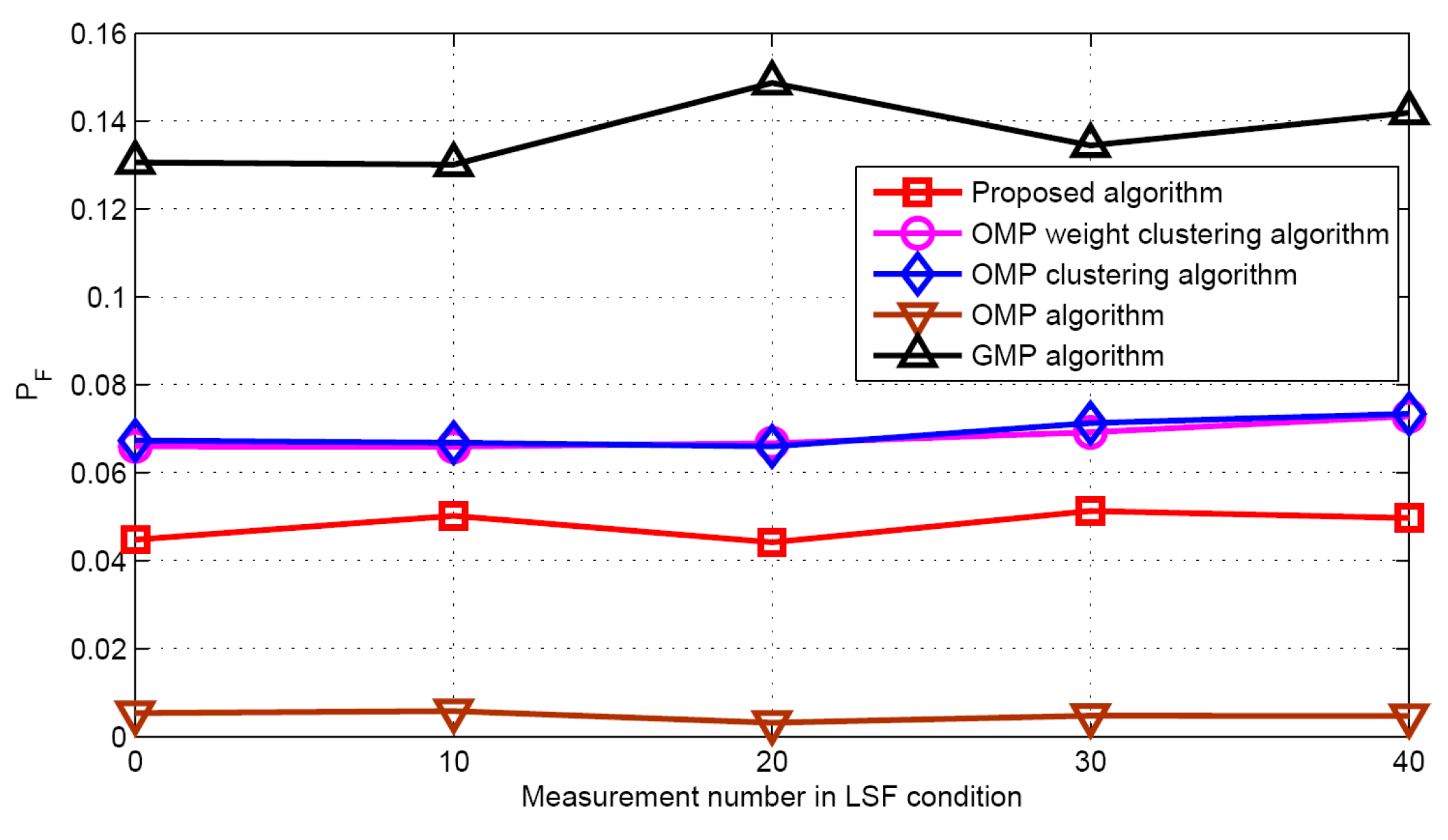
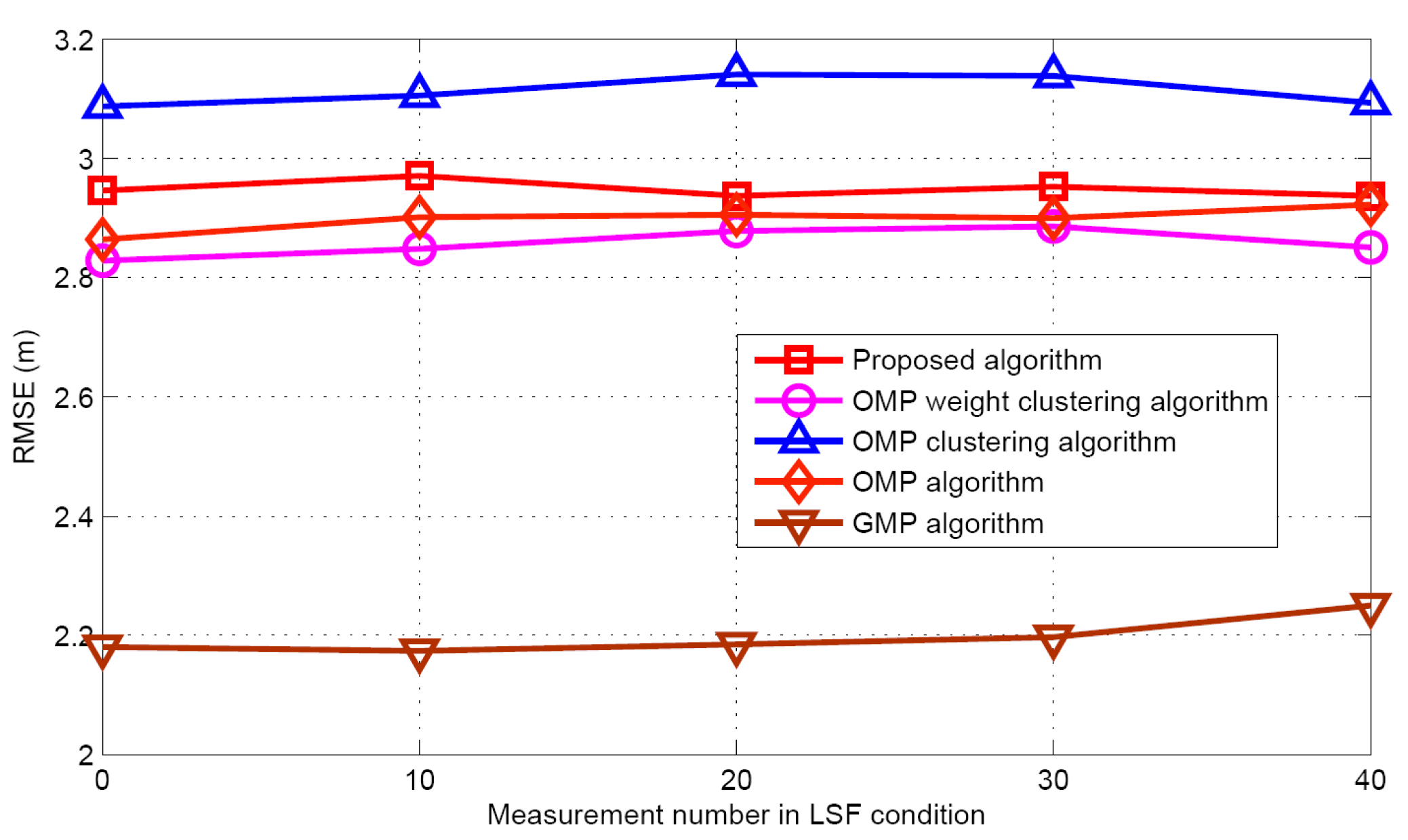
5.2.2. LSF Condition
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, K.; Sharp, I.; Guo, Y.J. Ground-Based Wireless Positioning; John Wiley & Sons Ltd.: Chichester, UK, 2009. [Google Scholar]
- Gezici, S.; Poor, H.V. Position estimation via ultra-wide-band signals. Proc. IEEE 2009, 97, 386–403. [Google Scholar] [CrossRef]
- Yu, K.; Oppermann, I.; Dutkiewicz, E.; Sharp, I.; Retscher, G. Indoor navigation and tracking. Phys. Commun. 2014, 13, 1–3. [Google Scholar] [CrossRef]
- Au, A.W.S. RSS-Based Wlan Indoor Positioning and Tracking System Using Compressive Sensing and Its Implementation on Mobile Devices. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2010. [Google Scholar]
- Sayed, A.H.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Process. Mag. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Sharp, I.; Yu, K. Sensor-based dead-reckoning for indoor positioning. Phys. Commun. 2014, 13, 4–16. [Google Scholar] [CrossRef]
- Varshavsky, A.; Lara, E.; Hightower, J.; Lamarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. J. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Rehman, W.; Lara, E.; Saroiu, S. CILoS: A CDMA indoor localization system. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 104–113. [Google Scholar]
- Chen, L.; Wu, L. Mobile positioning in mixed LOS/NLOS conditions using modified EKF banks and data fusion method. IEICE Trans. Commun. 2009, 92, 1318–1325. [Google Scholar]
- Chen, L.; Ali-Loytty, S.; Piche, R.; Wu, L. Mobile tracking in mixed line-of-sight/non-line-of-sight conditions: Algorithm and theoretical lower bound. Wirel. Pers. Commun. 2012, 65, 753–771. [Google Scholar] [CrossRef]
- Yan, J.; Yu, K.; Wu, L. Single frequency network based mobile tracking in NLOS environments. Phys. Commun. 2013, 13, 54–67. [Google Scholar] [CrossRef]
- Yan, J.; Wu, L. A passive location system for single frequency networks using digital terrestrial TV signals. Eur. Trans. Telecommun. 2011, 22, 487–499. [Google Scholar] [CrossRef]
- Chen, L.; Julien, O.; Thevenon, P.; Serant, D.; Kuusniemi, H. TOA Estimation for Positioning With DVB-T Signals in Outdoor Static Tests. IEEE Trans. Broadcast. 2015, 61, 625–638. [Google Scholar] [CrossRef]
- Chen, L.; Thevenon, P.; Seco-Granados, G.; Julien, O.; Kuusniemi, H. Analysis on the TOA Tracking With DVB-T Signals for Positioning. IEEE Trans. Broadcast. 2016, 62, 957–961. [Google Scholar] [CrossRef]
- Gezic, S.; Zhi, T.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Fang, S.H.; Lin, T.N.; Lee, K.C. A novel algorithm for multipath fingerprinting in indoor WLAN environments. IEEE Trans. Wirel. Commun. 2008, 7, 3579–3588. [Google Scholar] [CrossRef]
- Kushki, A.; Plataniotis, N.; Venetsanopoulos, A.N. Kernel-based positioning in wireless local area networks. IEEE Trans. Mob. Comput. 2007, 6, 689–705. [Google Scholar] [CrossRef]
- Ni, L.M.; Zhang, D.; Souryal, M.R. RFID-based localization and tracking technologies. IEEE Wirel. Commun. 2011, 18, 45–51. [Google Scholar] [CrossRef]
- Basheer, M.R.; Jagannathan, S. Localization of RFID tags using stochastic tunneling. IEEE Trans. Mob. Comput. 2013, 12, 1225–1235. [Google Scholar] [CrossRef]
- Hernandez, O.; Bouchereau, F.; Munoz, D. Maximum likelihood position estimation in ad-hoc networks using a dead reckoning approach. IEEE Trans. Wirel. Commun. 2008, 7, 1572–1584. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian fusion for indoor positioning using bluetooth fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Vervisch-Picois, A.; Samama, N. Interference mitigation in a repeater and pseudolite indoor positioning system. IEEE J. Sel. Top. Signal Process. 2009, 3, 810–820. [Google Scholar] [CrossRef]
- Fang, S.H.; Lin, T.N. Principal component localization in indoor WLAN environments. IEEE Trans. Mob. Comput. 2012, 11, 100–110. [Google Scholar] [CrossRef]
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.M.; Femandez, P.; Lago, F.A.; Garcia, E.; Blas, J.; Abril, E.J. Robust indoor positioning provided by real-time RSSI values in unmodified WLAN networks. IEEE J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Alsindi, N.; Chaloupka, Z.; Alkhanbash, N.; Aweya, J. An empirical evaluation of a probabilistic RF signature for WLAN location fingerprinting. IEEE Trans. Wirel. Commun. 2014, 13, 3257–3268. [Google Scholar] [CrossRef]
- Pivato, P.; Palopoli, L.; Petri, D. Accuracy of RSS-based centroid localization algorithms in an indoor environment. IEEE Trans. Instrum. Meas. 2011, 60, 3451–3460. [Google Scholar] [CrossRef]
- Milioris, D.; Kriara, L.; Papakonstantinou, A.; Tzagkarakis, G.; Tsakalides, P.; Papadopouli, M. Empirical evaluation of signal-strength fingerprint positioning in wireless LANs. In Proceedings of the 13th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Bodrum, Turkey, 17–21 October 2010. [Google Scholar]
- Emmanuel, J.C.; Michael, B.W. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar]
- Cevher, V.; Boufounos, P.; Baraniuk, R.G.; Gilbert, A.C.; Strauss, M.J. Near-optimal Bayesian localization via incoherence and sparsity. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks (IPSN’2009), Washington, DC, USA, 13–16 April 2009; pp. 205–216. [Google Scholar]
- Nikitaki, S.; Tsakalides, P. Localization in wireless networks via spatial sparsity. In Proceedings of the Forty Fourth Asilomar Conference on Signals, Systems, and Computers (ASILOMAR), Pacific Grove, CA, USA, 7–10 October 2010; pp. 236–239. [Google Scholar]
- Wang, J.; Fang, D.; Chen, X.; Yang, Z.; Xing, T.; Cai, L. LCS: Compressive sensing based device-free localization for multiple targets in sensor networks. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 145–149. [Google Scholar]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Compressive sensing based positioning using RSS of WLAN access points. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Au, A.W.S.; Feng, C.; Valaee, S.; Reyes, S.; Sorour, S.; Markowitz, S.N.; Gold, D.; Gordon, K.; Eizenman, M. Indoor tracking and navigation using received signal strength and compressive sensing on a mobile device. IEEE Trans. Mob. Comput. 2013, 12, 2050–2062. [Google Scholar] [CrossRef]
- Tabibiazar, A.; Basir, O. Compressive sensing indoor localization. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Anchorage, AK, USA, 9–12 October 2011; pp. 1186–1991. [Google Scholar]
- Milioris, D.; Tzagkarakis, G.; Papakonstantinou, A.; Papadopouli, M.; Tsakalides, P. Low-dimensional signal-strength fingerprint-based positioning in wireless LANs. Ad Hoc Netw. 2014, 12, 100–114. [Google Scholar] [CrossRef]
- Deng, J.; Cui, Q.; Zhang, X. Data pre-processing in compressive sensing based indoor fingerprinting positioning. Int. J. Wirel. Inf. Netw. 2013, 20, 256–267. [Google Scholar] [CrossRef]
- Feng, C.; Valaee, S.; Tan, Z. Multiple target localization using compressive sensing. In Proceedings of the 2009 IEEE Global Telecommunications Conference (GLOBECOM), Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Chen, S.S.; Donoho, D.L.; Saunders, M.A. Atomic decomposition by basis pursuit. SIAM J. Sci. Comput. 1998, 20, 33–61. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Cui, B.; Zhao, C.H.; Feng, C.; Xu, Y.L. An improved greedy matching pursuit algorithm for multiple target localization. In Proceedings of the Third International Conference on Instrumentation, Measurement, Computer, Communication and Control, Shenyang, China, 21–23 September 2013; pp. 926–930. [Google Scholar]
- Wyne, S.; Singh, A.P.; Tufvesson, F.; Molisch, A.F. A statistical model for indoor office wireless sensor channels. IEEE Trans. Wirel. Commun. 2009, 8, 4154–4164. [Google Scholar] [CrossRef]
- Haykin, S.; Moher, M. Modern Wireless Communications; Pearson Prentice Hall, Pearson Education: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery from Random Measurements via Orthogonal Matching Pursuit: The Gaussian Case. Available online: http://users.cms.caltech.edu/~jtropp/reports/TG07-Signal-Recovery-TR.pdf (accessed on 25 May 2017).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Computational Complexity |
|---|---|
| BP-based localization algorithm | |
| OMP-based localization algorithm | |
| Proposed algorithm |
| 1.23 | −9.52 | 20.64 | −8.17 | 3.84 | −0.05 | 1.05 |
| 2.5 | 0.3 | −50.9 | 2.7 | 0.1 | 1.5 |
| = 0.15 = 0.3 | = 0.15 = 0.25 | = 0.1 = 0.3 | |
|---|---|---|---|
| Mean | 5.8790 | 6.5905 | 5.9285 |
| Std | 2.5166 | 2.6884 | 2.5696 |
| False alarm rate | 0.0448 | 0.0673 | 0.0479 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Yu, K.; Chen, R.; Chen, L. An Improved Compressive Sensing and Received Signal Strength-Based Target Localization Algorithm with Unknown Target Population for Wireless Local Area Networks. Sensors 2017, 17, 1246. https://doi.org/10.3390/s17061246
Yan J, Yu K, Chen R, Chen L. An Improved Compressive Sensing and Received Signal Strength-Based Target Localization Algorithm with Unknown Target Population for Wireless Local Area Networks. Sensors. 2017; 17(6):1246. https://doi.org/10.3390/s17061246
Chicago/Turabian StyleYan, Jun, Kegen Yu, Ruizhi Chen, and Liang Chen. 2017. "An Improved Compressive Sensing and Received Signal Strength-Based Target Localization Algorithm with Unknown Target Population for Wireless Local Area Networks" Sensors 17, no. 6: 1246. https://doi.org/10.3390/s17061246