
Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application




Abstract
:1. Introduction
2. Image Change Detection with NSCT-HMT Model
2.1. Generation of the Difference Image
2.2. A Denoising Method Based on the NSCT-HMT Model
- The mean difference map was dealt with the NSCT decomposition;
- After the NSCT decomposition, the coefficients of NSCT are fitted by Gauss mixture model;
- Using the HMT model to estimate the parameters;
- The Monte-Carlo method is used to generate random white noise images and balance the variance of the image in the NSCT domain;
- The EM algorithm is used to estimate the NSCT coefficient of the denoised image;
- Using the NSCT synthesis to get denoised image.
2.2.1. NSCT Transform and the Hidden Markov Model
2.2.2. Establishment of NSCT-HMT Model
2.2.3. Image Denoising Based on NSCT-HMT Model
- By Equation (4), the parameters of the model can be expressed as:
- The Monte-Carlo method proposed by Crouse et al. is used to generate random white noise images and balance the variance of the image in the NSCT domain [30], and then the noise variance of the coefficient is estimated in the noise image model. The variance of the noise coefficient can be expressed as . The coefficient model of the original image can be obtained by subtracting the noisy image’s variance of the noise coefficient of the NSCT-HMT model [26]:where j, k, i respectively refer to the scale, direction, and coefficient. m indicates the hidden state of the NSCT coefficient.
- The NSCT-HMT parameter model of the denoised image can be expressed as:The above parameters are used to estimate the NSCT coefficients of the denoised image. When the state Sj,k,i is constant, the NSCT coefficients obey the Gauss distribution. It is assumed that the noise is Gauss white noise with a mean value of 0, and it is independent of the NSCT coefficient. Then the NSCT coefficient of the Bayes denoised image [26] can be represented as:
- The conditional probability obtained by the EM algorithm [26] can be expressed as:
- The NSCT coefficient of the denoised image can be estimated as:
2.3. FLICM Clustering
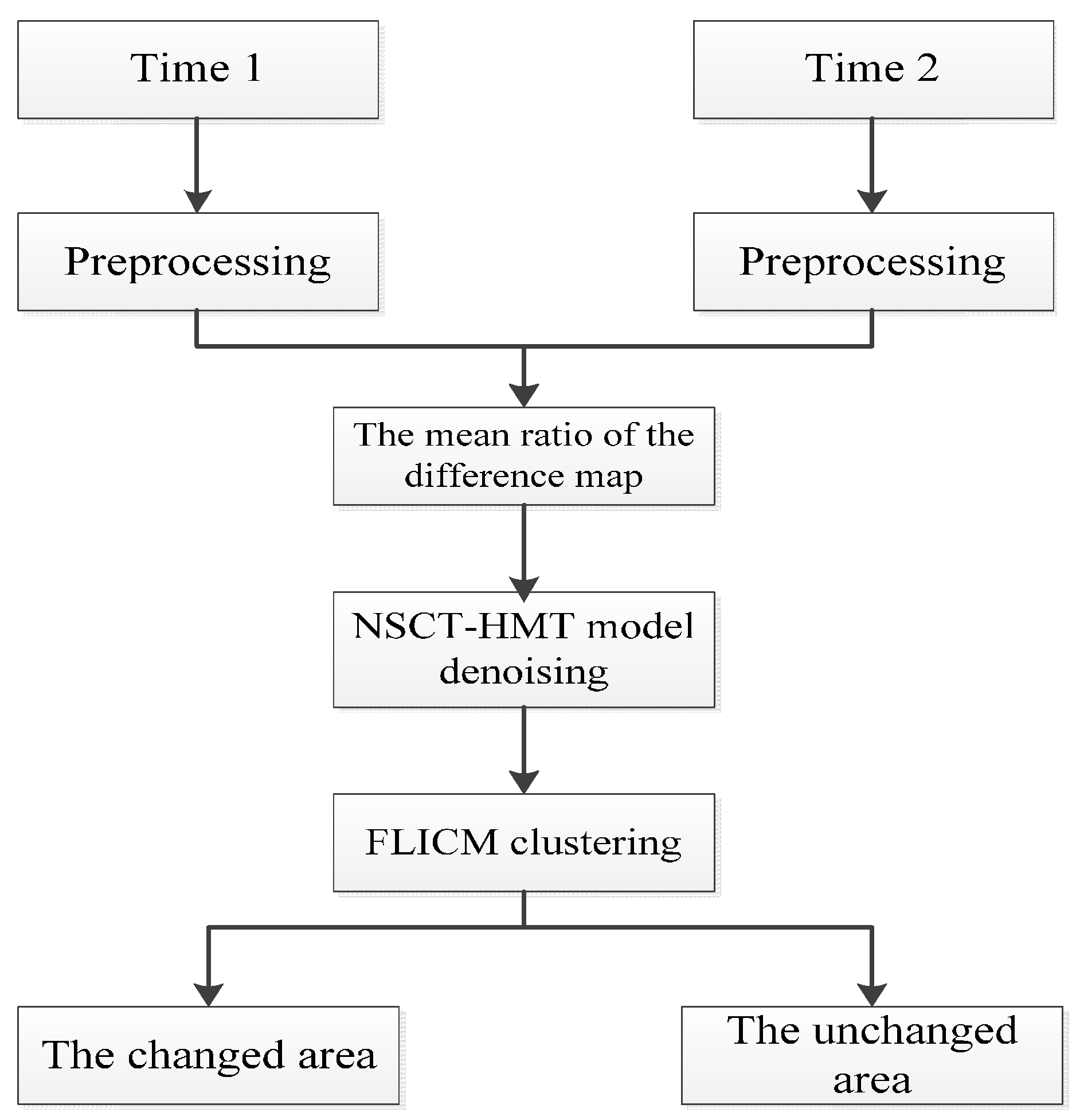
2.4. Implementation Steps
- Step 1:
- The original remote sensing images are calibrated by ENVI software;
- Step 2:
- The difference image is obtained by using Equation (1) on the calibrated images;
- Step 3:
- The NSCT transform is used to transform the difference image, and the transformed coefficients are modeled using a hidden Markov tree. Equation (6) is used to obtain the coefficients of the original image. Finally, Equation (10) is used to estimate the NSCT coefficients of the denoised image.
- Step 4:
- The Inverse NSCT transform is used to obtain the difference image after denoising.
- Step 5:
- After the above treatment, Equation (12) is used to cluster the difference map, and the final change detection results are obtained.
3. SAR Image Change Detection
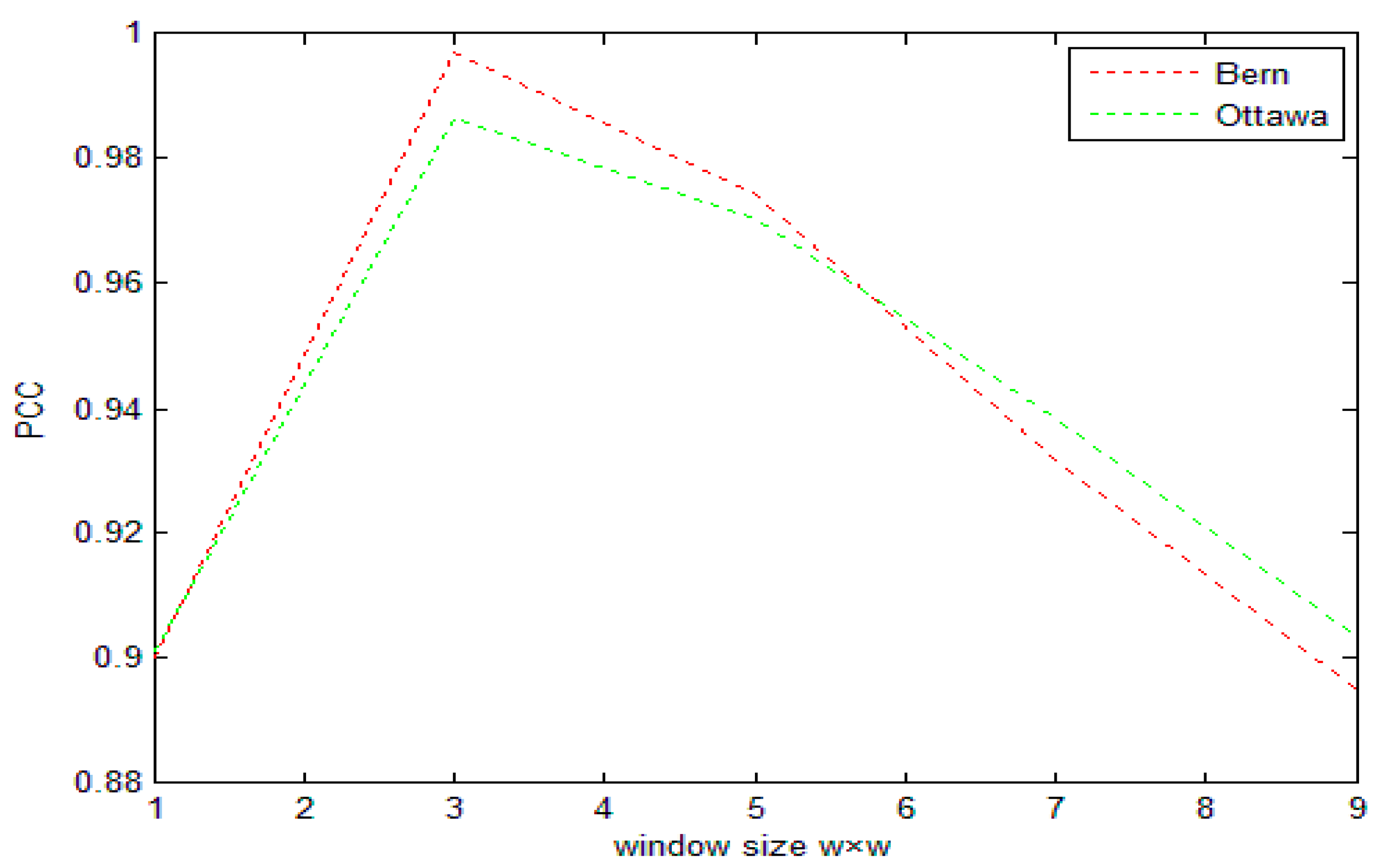
3.1. The Selection of the Window Size for SAR Image
3.2. SAR Image Data Description
3.2.1. Real Remote Sensing Image of the Bern Data Set
3.2.2. Real Remote Sensing Image of Ottawa Data Set
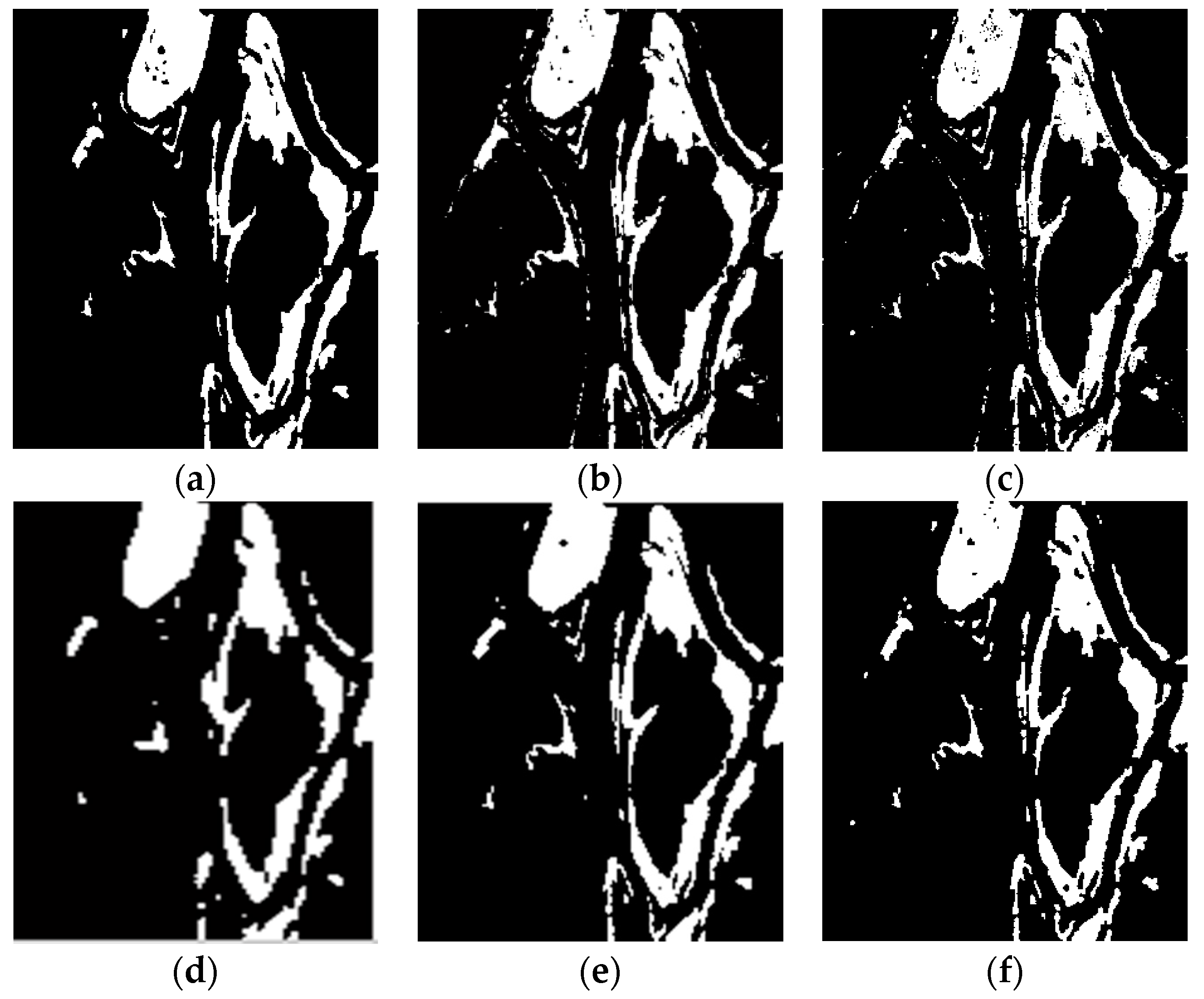
3.3. SAR Image Data Experimental Results and Analysis
3.4. The General Applicability of Verification Glgorithm for SAR Image
- Compared with the previous algorithms, the proposed algorithm can suppress clutter noise better while preserving detailed information from the original image.
- The proposed algorithm has a faster processing speed than MRF-FCM, but it is a little slower than NSCT-FCM, PA-GT and PCA-NLM. The complexity of the proposed algorithm needs to be improved.
- The proposed algorithm is suitable to detect SAR images.
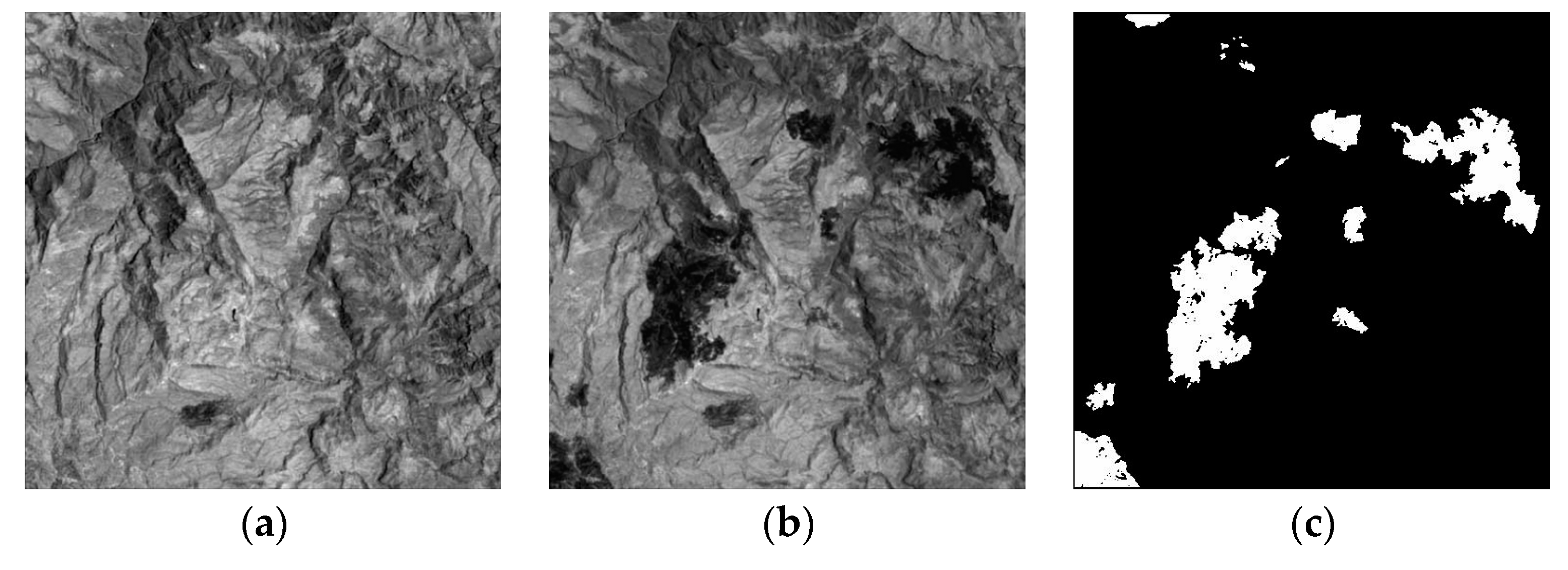
4. Multi-Spectral Image Change Detection
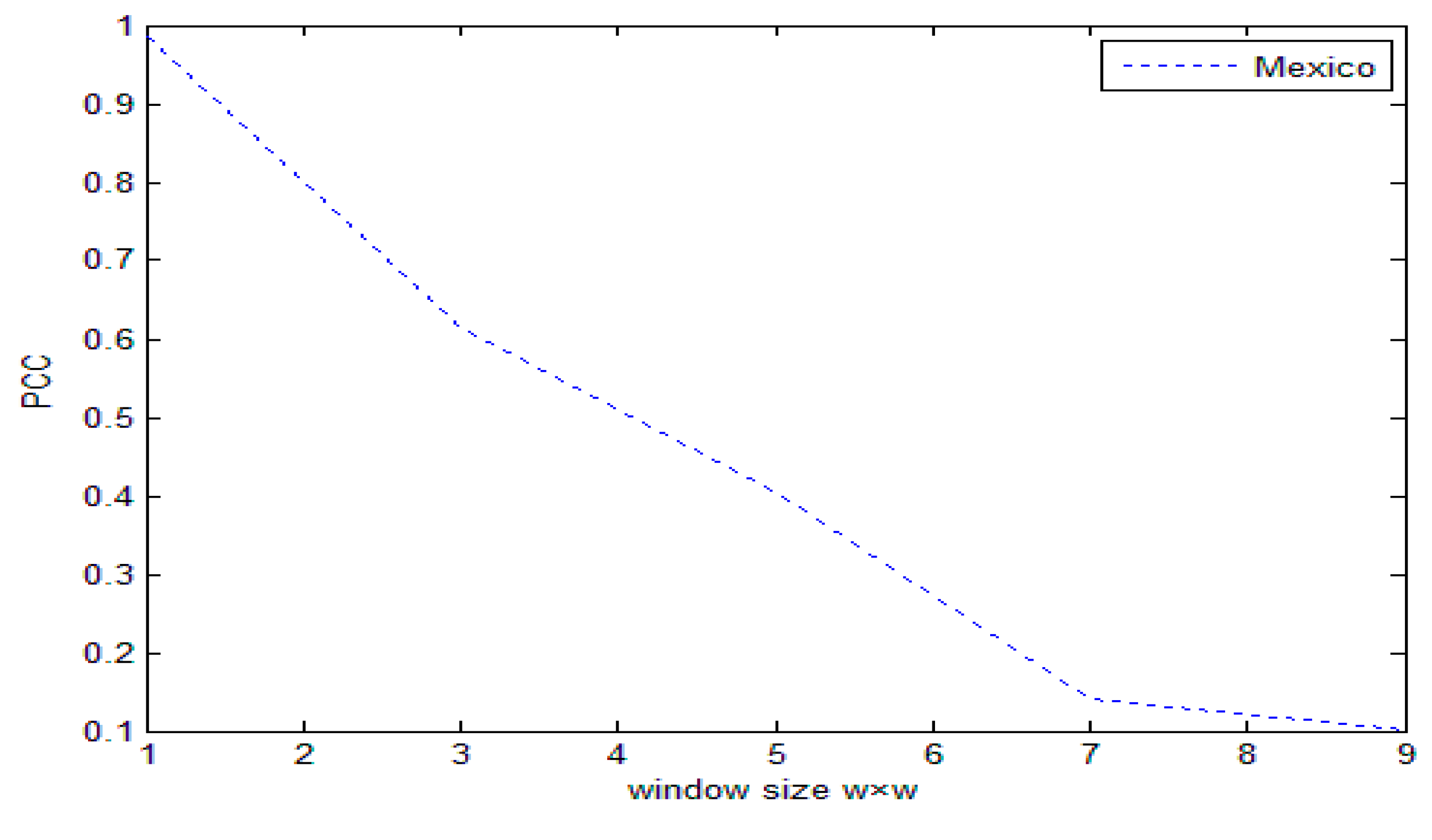
4.1. The Selection of the Window Size for Multi-Spectral Remote Sensing Image
4.2. Image Data Description
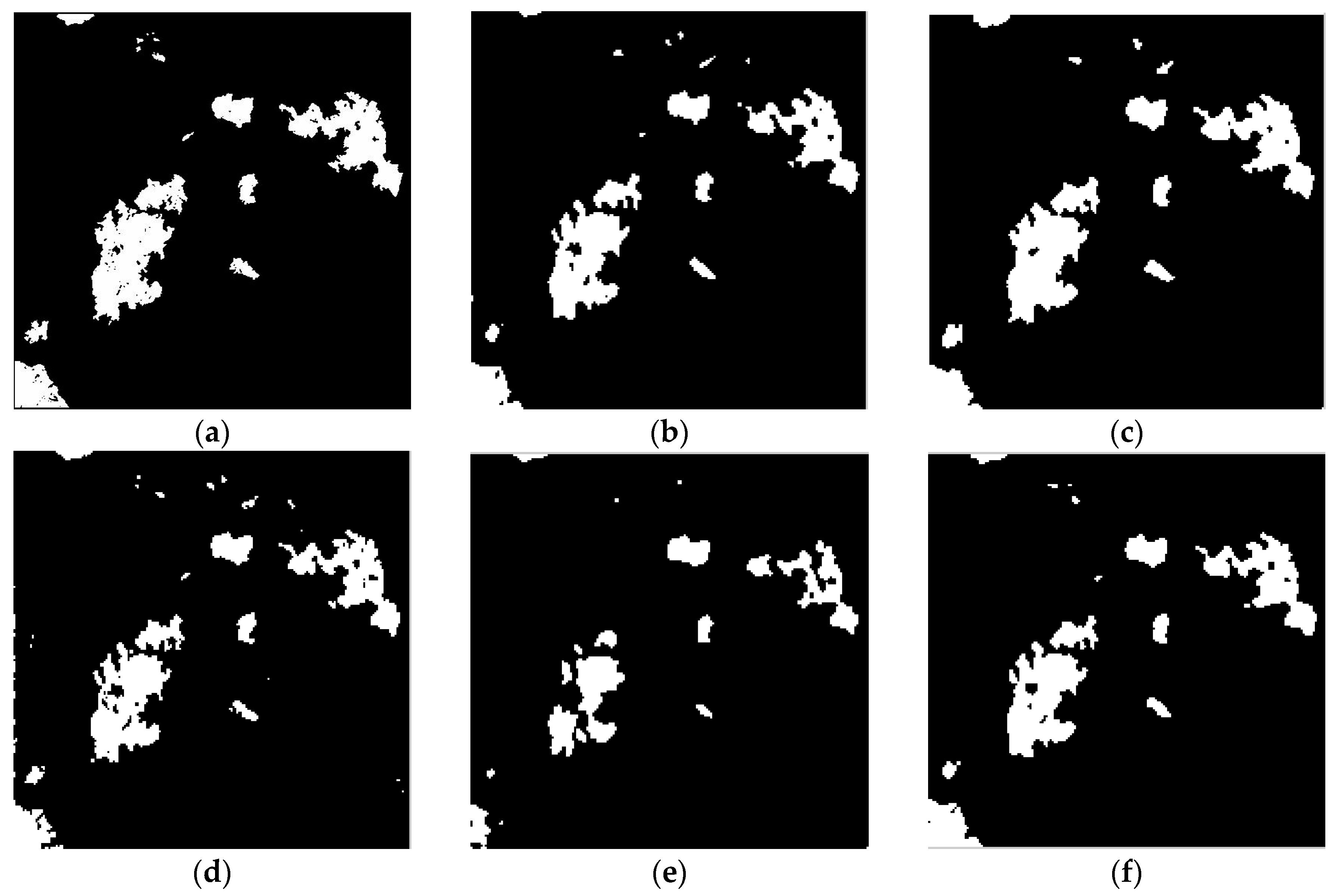
4.3. Multi-Spectral Image Data Experimental Results and Analysis
- The PA-GT and PCA-NLM algorithms can achieve good results when dealing with SAR images. But, in dealing with real multi-spectral remote sensing images, the results are poor.
- The proposed algorithm can be used for multi-spectral remote sensing image change detection.
4.4. The General Applicability of Verification Glgorithm for Multi-Spectral Image
- Compared with the previous four algorithms, the proposed algorithm has a good balance in the number of false negatives and false positives.
- The proposed algorithm is more suitable to detect multi-spectral images.
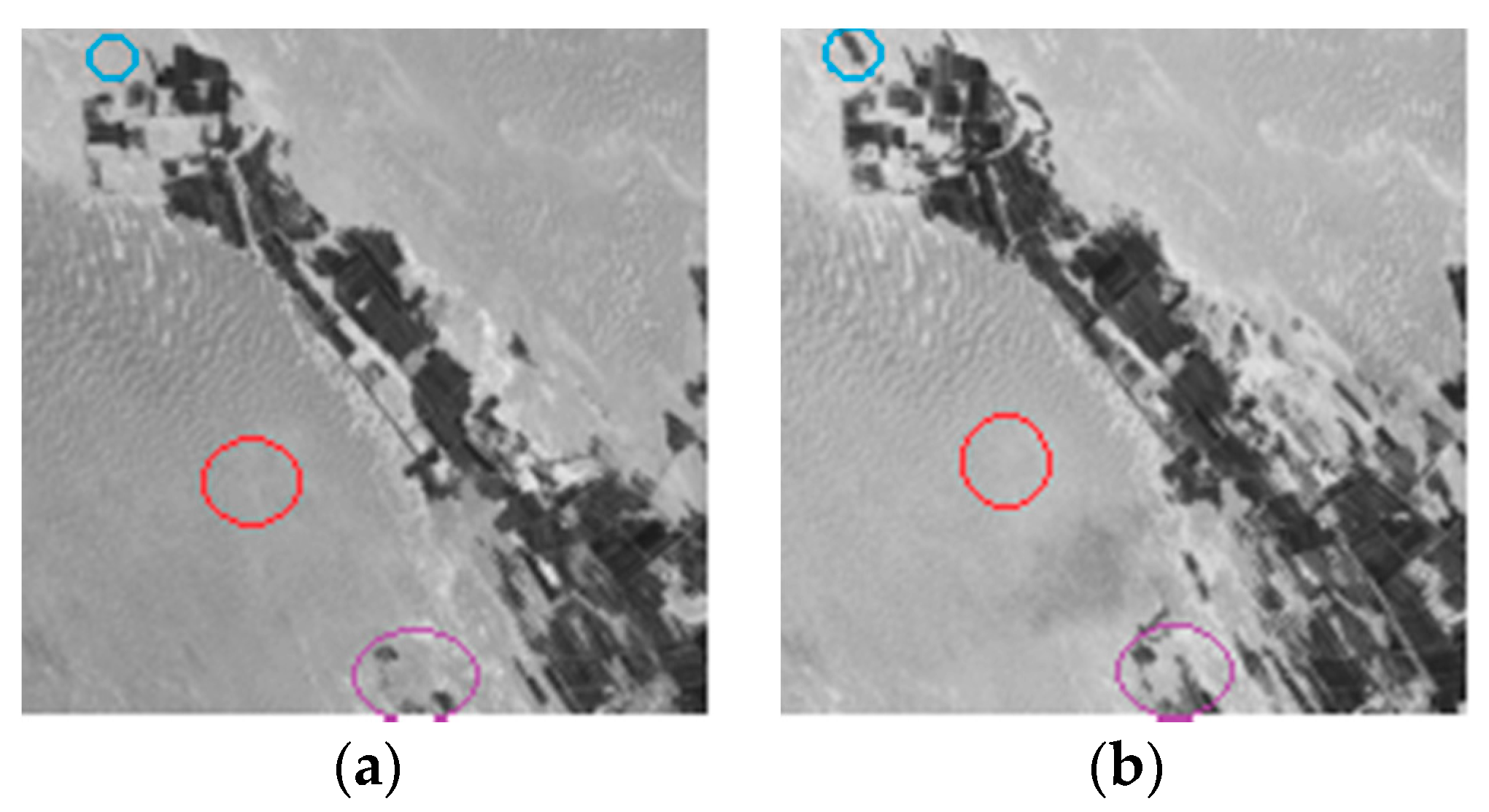
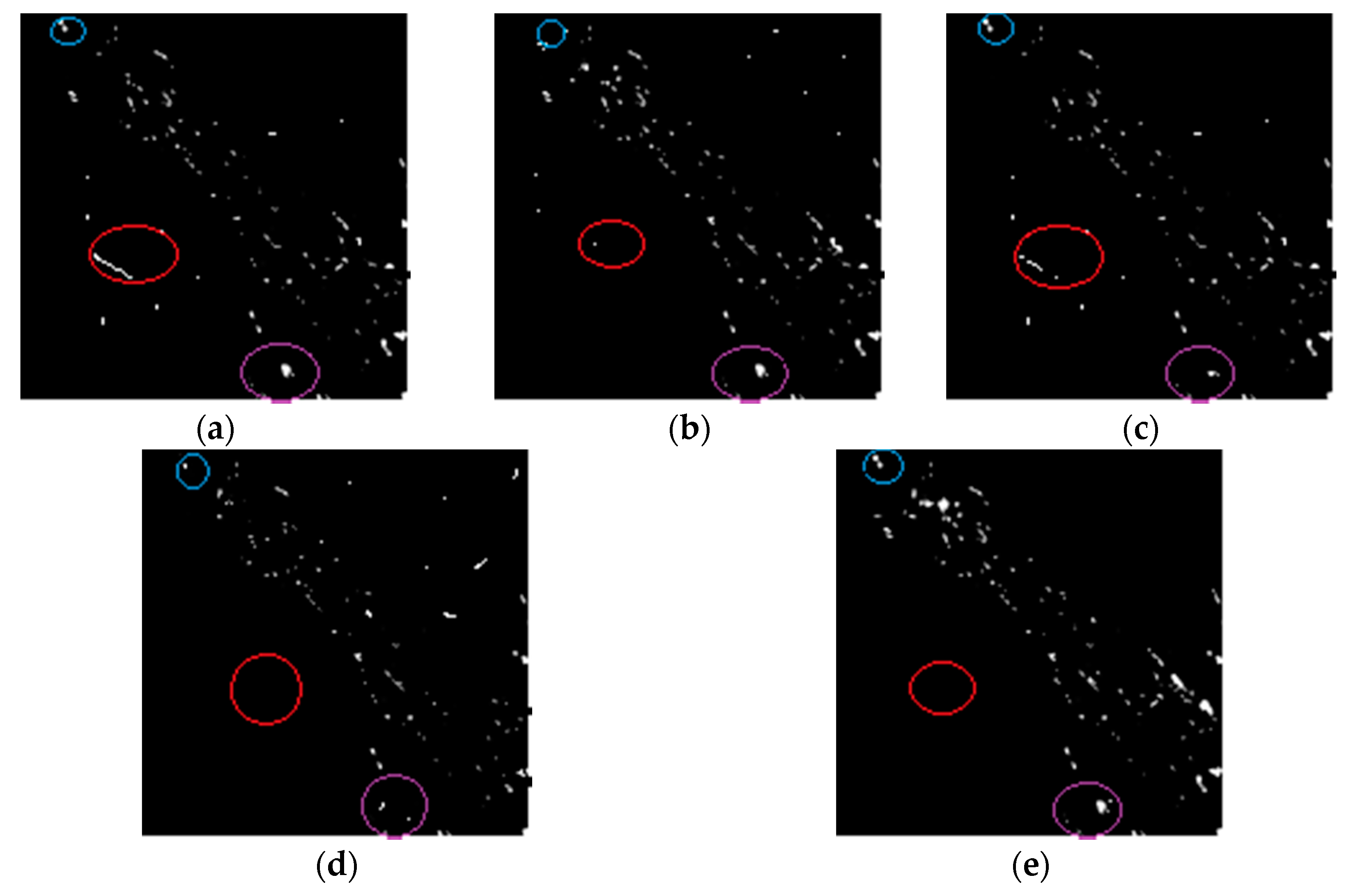
5. Application
5.1. Acquisition of Real Remote Sensing Image
5.2. Analysis the Change of Oasis Cover
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 40–86. [Google Scholar]
- Tsai, D.M.; Lai, S.C. Independent component analysis-based background subtraction for indoor surveillance. IEEE Trans. Image Process. 2009, 18, 158–167. [Google Scholar] [CrossRef] [PubMed]
- Ho, S.S.; Wechsler, H. A martingale framework for detecting changes in data streams by testing exchangeability. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2113–2127. [Google Scholar] [PubMed]
- Gao, Z.; Xu, N.; Fu, C.; Ning, J. Evaluating Drought Monitoring Methods Using Remote Sensing: A Dynamic Correlation Analysis Between Heat Fluxes and Land Cover Patterns. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 298–303. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.J.-P.; Bates, P.D.; Mason, D.C. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef]
- Meyer, W.B.; Turner, B.L. Human population growth and global land-use/cover change. Annu. Rev. Ecol. Syst. 1992, 23, 39–61. [Google Scholar] [CrossRef]
- Lunetta, R.S.; Elvidge, C.D. Remote Sensing Change Detection: Environmental Monitoring Methods and Applications; Taylor & Francis Ltd.: New Delhi, India, 1999; pp. 22–41. [Google Scholar]
- Paglieroni, D.W.; Pechard, C.T.; Beer, N.R. Change Detection in Constellations of Buried Objects Extracted From Ground-Penetrating Radar Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2426–2439. [Google Scholar] [CrossRef]
- Li, S.Z. Markov Random Field Modeling in Image Analysis; Springer Science & Business Media: Berlin, Germany, 2009. [Google Scholar]
- Do, M.N.; Vetterli, M. The contourlet transform: An efficient directional multiresolution image representation. IEEE Trans. Image Process. 2005, 14, 2091–2106. [Google Scholar] [CrossRef] [PubMed]
- Gong, M.; Su, L.; Jia, M.; Chen, W. Fuzzy clustering with a modified MRF energy function for change detection in synthetic aperture radar images. IEEE Trans. Fuzzy Syst. 2014, 22, 98–109. [Google Scholar] [CrossRef]
- Hesen, R.; Jia, Z.H.; Qin, X.Z.; Jie, Y.; Hu, R. Based on NSCT Combination with FCM Multitemporal Remote Sensing Image Change Detection. Laser J. 2014, 35, 42–44. [Google Scholar]
- Pham, M.T.; Mercier, G.; Michel, J. Change Detection between SAR Images Using a Pointwise Approach and Graph Theory. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1–13. [Google Scholar] [CrossRef]
- Yousif, O.; Ban, Y. Improving Urban Change Detection from Multitemporal SAR Images Using PCA-NLM. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2032–2041. [Google Scholar] [CrossRef]
- Yetgin, Z. Unsupervised Change Detection of Satellite Images Using Local Gradual Descent. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1919–1929. [Google Scholar] [CrossRef]
- Celik, T.; Ma, K.K. Multitemporal Image Change Detection Using Undecimated Discrete Wavelet Transform and Active Contours. IEEE Trans. Geosci. Remote Sens. 2011, 49, 706–716. [Google Scholar] [CrossRef]
- Ma, W.; Jiao, L.; Gong, M.; Li, C. Image change detection based on an improved rough fuzzy c-means clustering algorithm. Int. J. Mach. Learn. Cybern. 2014, 5, 369–377. [Google Scholar] [CrossRef]
- Brunner, D.; Bruzzone, L.; Lemoine, G. Change detection for earthquake damage assessment in built-up areas using very high resolution optical and SAR imagery. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3210–3213. [Google Scholar]
- Shao, P.; Shi, W.; He, P.; Hao, P.; Zhang, X. Novel Approach to Unsupervised Change Detection Based on a Robust Semi-Supervised FCM Clustering Algorithm. Remote Sens. 2016, 8, 264. [Google Scholar] [CrossRef]
- Mercier, G.; Moser, G.; Serpico, S.B. Conditional Copulas for Change Detection in Heterogeneous Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1428–1441. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Chen, T.; Zhang, Y. Change detection for the urban area based on multiple sensor information fusion. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 29–29 July 2005. [Google Scholar]
- Alberga, V. Similarity Measures of Remotely Sensed Multi-Sensor Images for Change Detection Applications. Remote Sens. 2009, 1, 122–143. [Google Scholar] [CrossRef]
- Kuruoglu, E.E.; Zerubia, J. Modeling SAR images with a generalization of the Rayleigh distribution. IEEE Trans. Image Process. 2004, 13, 527–533. [Google Scholar] [CrossRef] [PubMed]
- Inglada, J.; Mercier, G. A New Statistical Similarity Measure for Change Detection in Multitemporal SAR Images and Its Extension to Multiscale Change Analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Wang, X.; Ni, P.; Su, X.; Fang, L.; Song, C. The nonsubsampled Contourlet HMT model. Sci. China Inf. Sci. 2013, 43, 1431. [Google Scholar]
- Da, C.A.; Zhou, J.; Do, M.N. The nonsubsampled contourlet transform: Theory, design, and applications. IEEE Trans. Image Process. 2006, 15, 3089–3101. [Google Scholar]
- Wu, Y.; Li, M.; Zong, H.; Wang, X. Fusion Segmentation Algorithm for SAR Images Based on HMT in Contourlet Domain and D-S Theory of Evidence. Proceedings of Computational Science and Its Applications (ICCSA), Seoul, Korea, 29 June–2 July 2009; Gervasi, O., Taniar, D., Murgante, B., Laganà, A., Mun, Y., Gavrilova, M.L., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 937–951. [Google Scholar]
- Wang, X.H.; Chen, M.Y.; Song, C.M.; Xu, M.C.; Fang, L.L. Contourlet HMT model with directional feature. Sci. China Inf. Sci. 2012, 55, 1563–1578. [Google Scholar] [CrossRef]
- Fan, G.; Xia, X.G. Wavelet-based texture analysis and synthesis using hidden Markov models. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2003, 50, 106–120. [Google Scholar]
- Crouse, M.S.; Nowak, R.D.; Baraniuk, R.G. Wavelet-based statistical signal processing using hidden Markov models. IEEE Trans. Signal Process. 1998, 46, 886–902. [Google Scholar] [CrossRef]
- Krinidis, S.; Chatzis, V. A robust fuzzy local information C-means clustering algorithm. IEEE Trans. Image Process. 2010, 19, 1328–1337. [Google Scholar] [CrossRef] [PubMed]
- Gong, M.; Zhou, Z.; Ma, J. Change Detection in Synthetic Aperture Radar Images Based on Image Fusion and Fuzzy Clustering. IEEE Trans. Image Process. 2012, 21, 2141–2151. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Method Used | FN | FP | OE | PCC (%) | Kappa | T (s) |
|---|---|---|---|---|---|---|---|
| Bern | NSCT-FCM | 168 | 282 | 450 | 99.50 | 0.8146 | 8.43 |
| MRF-FCM | 47 | 364 | 411 | 99.55 | 0.8453 | 73.91 | |
| PA-GT | 195 | 109 | 304 | 99.67 | 0.8621 | 10.06 | |
| PCA-NLM | 96 | 267 | 363 | 99.61 | 0.8517 | 11.29 | |
| Proposed Method | 173 | 103 | 276 | 99.69 | 0.8796 | 18.43 | |
| Ottawa | NSCT-FCM | 236 | 2286 | 2522 | 97.51 | 0.9112 | 9.36 |
| MRF-FCM | 681 | 1079 | 1760 | 98.26 | 0.9355 | 83.81 | |
| PA-GT | 1010 | 747 | 1757 | 97.91 | 0.9203 | 12.43 | |
| PCA-NLM | 781 | 872 | 1653 | 98.37 | 0.9387 | 14.08 | |
| Proposed Method | 532 | 833 | 1365 | 98.65 | 0.9498 | 20.37 |
| Method Used | /% | /% | /% | /% | /s | |
|---|---|---|---|---|---|---|
| NSCT-FCM | 10.72 | 9.86 | 20.58 | 79.42 | 0.8043 | 8.34 |
| MRF-FCM | 5.04 | 13.42 | 18.46 | 81.54 | 0.8246 | 73.58 |
| PA-GT | 3.23 | 4.04 | 7.27 | 92.73 | 0.8742 | 10.02 |
| PCA-NLM | 4.21 | 7.43 | 11.64 | 88.36 | 0.8649 | 11.04 |
| Proposed Method | 2.11 | 2.73 | 4.84 | 95.16 | 0.8927 | 17.95 |
| Data Set | Method Used | FN | FP | OE | PCC (%) | Kappa | T (s) |
|---|---|---|---|---|---|---|---|
| Mexico | NSCT-FCM | 1030 | 2402 | 3432 | 98.69 | 0.7418 | 15.48 |
| MRF-FCM | 1699 | 724 | 2423 | 99.07 | 0.8143 | 124.50 | |
| PA-GT | 997 | 1586 | 2583 | 99.01 | 0.7831 | 20.72 | |
| PCA-NLM | 4395 | 126 | 4521 | 98.09 | 0.5628 | 23.65 | |
| Proposed Method | 1425 | 671 | 2091 | 99.11 | 0.8417 | 28.54 |
| Method Used | /% | /% | /% | /% | /s | |
|---|---|---|---|---|---|---|
| NSCT-FCM | 5.18 | 7.93 | 13.11 | 86.89 | 0.7864 | 15.36 |
| MRF-FCM | 4.97 | 3.82 | 8.79 | 91.21 | 0.8013 | 122.43 |
| PA-GT | 2.83 | 4.67 | 7.50 | 92.50 | 0.7458 | 20.45 |
| PCA-NLM | 11.59 | 1.94 | 13.53 | 86.47 | 0.5816 | 23.51 |
| Proposed Method | 2.91 | 2.23 | 5.14 | 94.86 | 0.8793 | 27.74 |
| Time | NSCT-FCM | MRF-FCM | PA-GT | PCA-NLM | Proposed Algorithm |
|---|---|---|---|---|---|
| T (s) | 19.5 | 154.3 | 25.7 | 29.3 | 35.2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Zhang, Y.; Jia, Z.; Yang, J.; Kasabov, N. Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application. Sensors 2017, 17, 1295. https://doi.org/10.3390/s17061295
Chen P, Zhang Y, Jia Z, Yang J, Kasabov N. Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application. Sensors. 2017; 17(6):1295. https://doi.org/10.3390/s17061295
Chicago/Turabian StyleChen, Pengyun, Yichen Zhang, Zhenhong Jia, Jie Yang, and Nikola Kasabov. 2017. "Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application" Sensors 17, no. 6: 1295. https://doi.org/10.3390/s17061295
APA StyleChen, P., Zhang, Y., Jia, Z., Yang, J., & Kasabov, N. (2017). Remote Sensing Image Change Detection Based on NSCT-HMT Model and Its Application. Sensors, 17(6), 1295. https://doi.org/10.3390/s17061295