Response Characteristics and Experimental Study of Underground Magnetic Resonance Sounding Using a Small-Coil Sensor

 , , ,
, , ,
Abstract
:1. Introduction
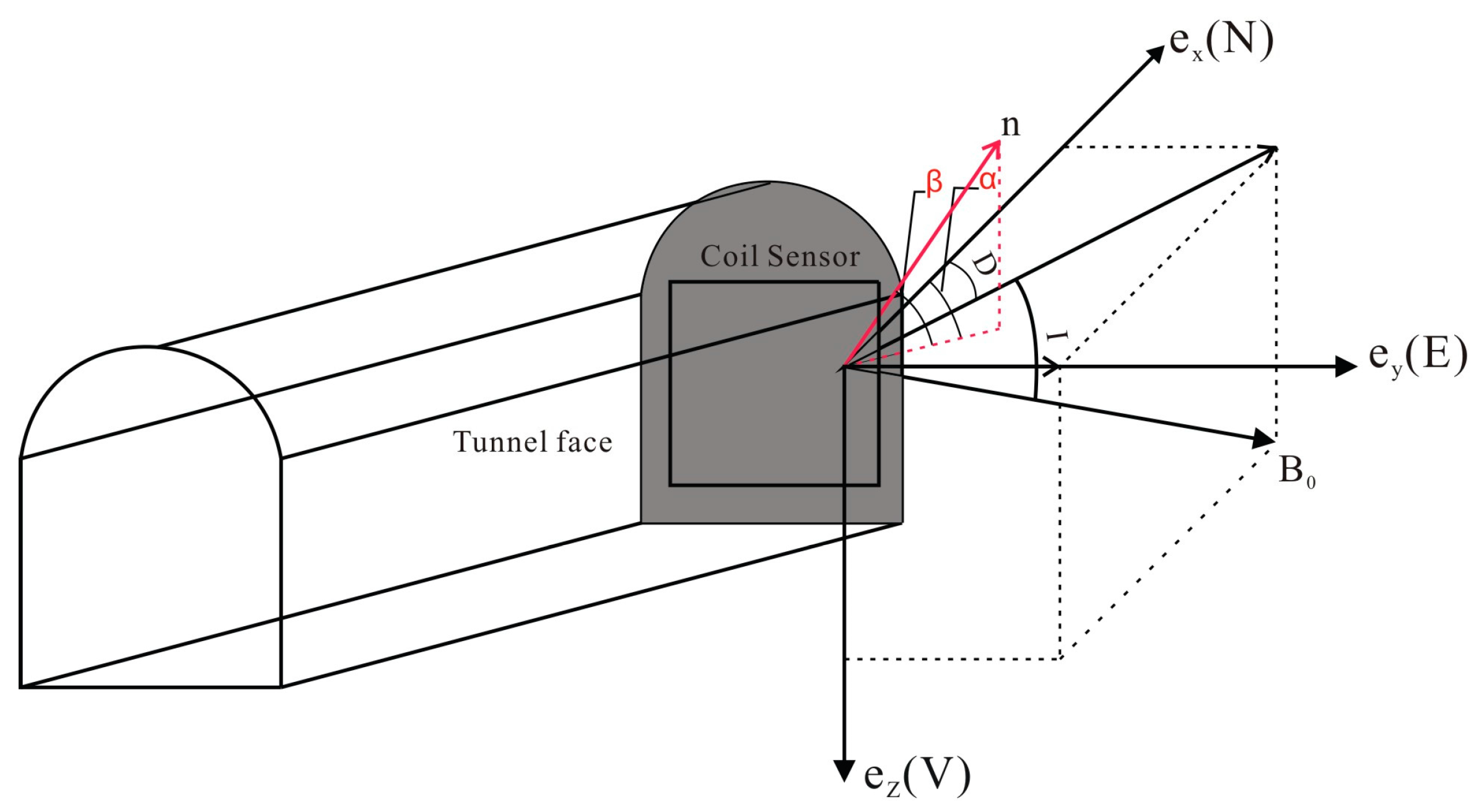
2. Method and Principles
3. Numerical Analysis of Underground MRS Using a Small-Coil Sensor
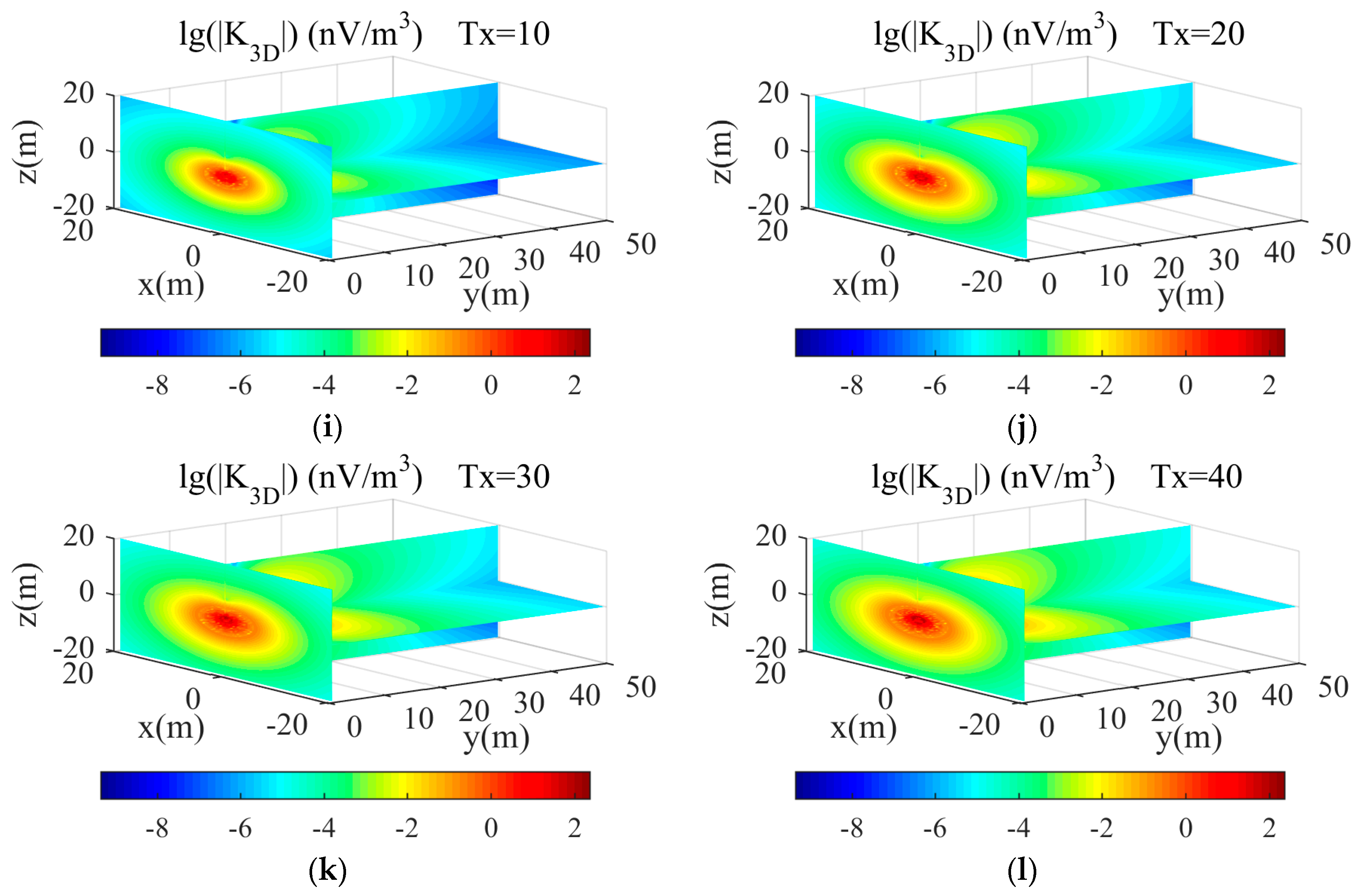
3.1. Calculation of the Kernel Function
3.2. Underground MRS Response
4. Physical Model Test
4.1. Forward Model
4.2. Physical Model Test Analysis
- (1)
- The small-coil sensor used in underground MRS can receive valid MRS signals in the prediction experiment.
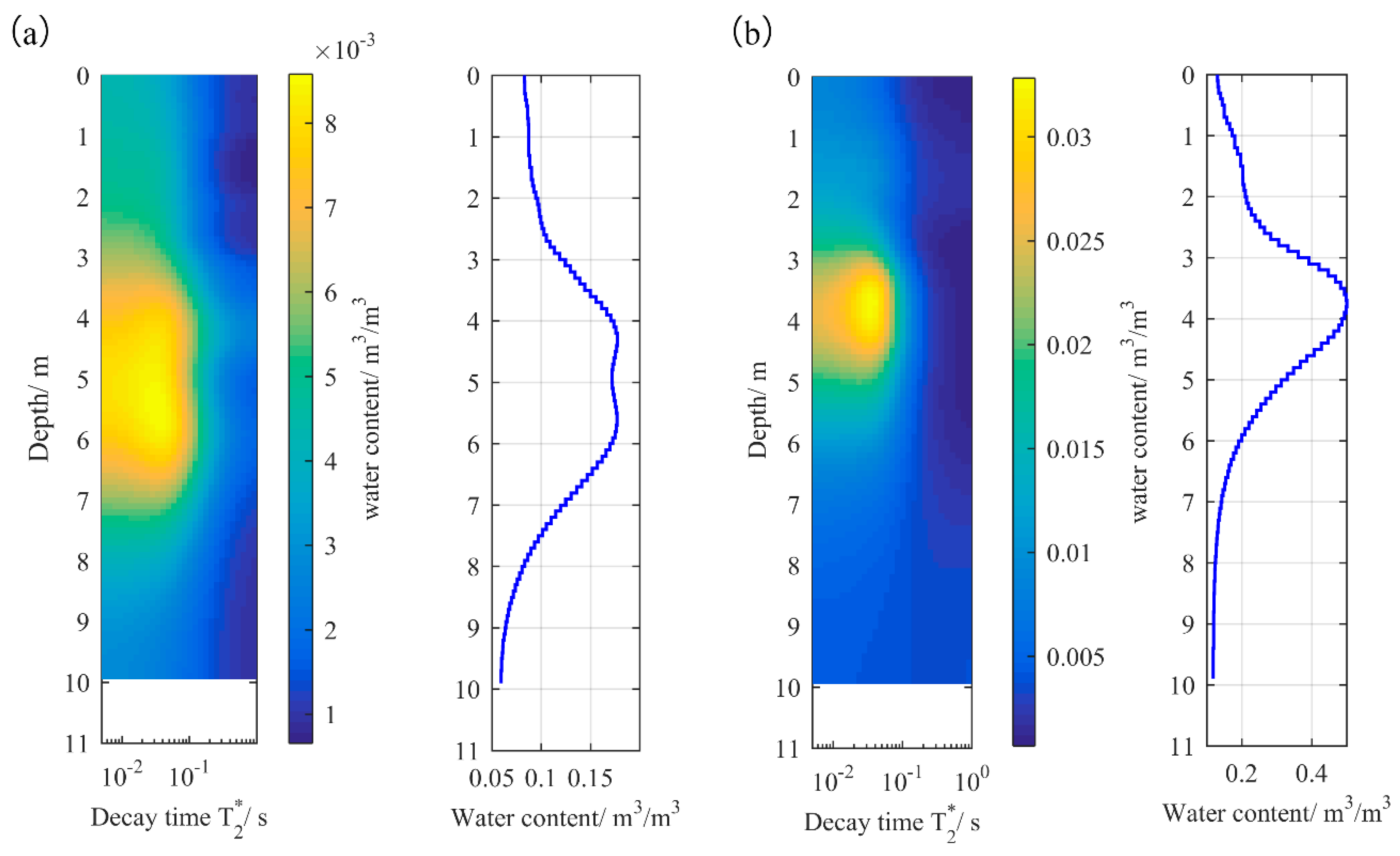
- (2)
- As the water level increases from 1 m to 2 m, the peak value of the water content curve increases from 0.18 to 1. Thus, the underground MRS technique can effectively quantify the size of the water-bearing structure.
- (3)
- The inversion results can accurately locate the aquifer, and the location and water content of the aquifer are consistent with the physical model, which confirms the validity of the prediction.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Greben, J.M.; Meyer, R.; Kimmie, Z. The underground application of Magnetic Resonance Soundings. J. Appl. Geophys. 2011, 75, 220–226. [Google Scholar] [CrossRef]
- Roy, J.; Lubczynski, M. The magnetic resonance sounding technique and its use for groundwater investigations. Hydrogeol. J. 2003, 11, 455–465. [Google Scholar] [CrossRef]
- Lin, J.; Du, G.; Zhang, J.; Yi, X.; Jiang, C.; Lin, T. Development of a Rigid One-Meter-Side and Cooled Coil Sensor at 77 K for Magnetic Resonance Sounding to Detect Subsurface Water Sources. Sensors 2017, 17, 1362. [Google Scholar] [CrossRef] [PubMed]
- Varian, N. Ground Liquid Prospecting Method and Apparatus. U.S. Patent 3,019,383, 30 January 1962. [Google Scholar]
- Semenov, A.G.; Schirov, M.D.; Legchenko, A.V.; Burshtein, A.I.; Pusep, A.Y. Device for Measuring the Parameters of an Underground Mineral Deposits. Great Britain, Patent 2198540B, 1989. [Google Scholar]
- Hertrich, M.; Braun, M.; Gunther, T.; Green, A.G.; Yaramanci, U. Surface Nuclear Magnetic Resonance Tomography. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3752–3759. [Google Scholar] [CrossRef]
- Yaramanci, U.; Lange, G.; Hertrich, M. Aquifer characterisation using Surface NMR jointly with other geophysical techniques at the Nauen/Berlin test site. J. Appl. Geophys. 2002, 50, 47–65. [Google Scholar] [CrossRef]
- Legchenko, A.; Baltassat, J.-M.; Beauce, A.; Bernard, J. Nuclear magnetic resonance as a geophysical tool for hydrogeologists. J. Appl. Geophys. 2002, 50, 21–46. [Google Scholar] [CrossRef]
- Wattanasen, K.; Elming, S.-Å. Direct and indirect methods for groundwater investigations: A case-study of MRS and VES in the southern part of Sweden. J. Appl. Geophys. 2008, 66, 104–117. [Google Scholar] [CrossRef]
- Pérez-Bielsa, C.; Lambán, L.J.; Plata, J.L.; Rubio, F.M.; Soto, R. Characterization of a karstic aquifer using magnetic resonance sounding and electrical resistivity tomography: A case-study of Estaña Lakes (northern Spain). Hydrogeol. J. 2012, 20, 1045–1059. [Google Scholar] [CrossRef]
- Boucher, M.; Favreau, G.; Vouillamoz, J.M.; Nazoumou, Y.; Legchenko, A. Estimating specific yield and transmissivity with magnetic resonance sounding in an unconfined sandstone aquifer (Niger). Hydrogeol. J. 2009, 17, 1805–1815. [Google Scholar] [CrossRef]
- Chalikakis, K.; Nielsen, M.R.; Legchenko, A. MRS applicability for a study of glacial sedimentary aquifers in Central Jutland, Denmark. J. Appl. Geophys. 2008, 66, 176–187. [Google Scholar] [CrossRef]
- Semenov, A. NMR Hydroscope for Water Prospecting. In Proceedings of the Seminar on Geotomography; Indian Geophysical Union: Hyderabad, Indian, 1987; pp. 66–67. [Google Scholar]
- Vouillamoz, J.-M.; Descloitres, M.; Bernard, J.; Fourcassier, P.; Romagny, L. Application of integrated magnetic resonance sounding and resistivity methods for borehole implementation. A case study in Cambodia. J. Appl. Geophys. 2002, 50, 67–81. [Google Scholar] [CrossRef]
- Hertrich, M.; Braun, M.; Yaramanci, U. Characteristics of MRS Soundings with separated loops. In Proceedings of the Near Surface 2004–10th EAGE European Meeting of Environmental and Engineering Geophysics, Urecht, The Netherlands, 6 September 2004. [Google Scholar]
- Walsh, D.O. Multi-channel surface NMR instrumentation and software for 1D/2D groundwater investigations. J. Appl. Geophys. 2008, 66, 140–150. [Google Scholar] [CrossRef]
- Zhang, X. Development of the transmitter in a surface NMR water investigation instrument. Chin. J. Sci. Instrum. 2006, 27, 689–692. [Google Scholar]
- Trushkin, D.V.; Shushakov, O.A.; Legchenko, A.V. The potential of a noise-reducing antenna for surface NMR groundwater surveys in the earth’s magnetic field. Geophys. Prospect. 1994, 42, 855–862. [Google Scholar] [CrossRef]
- Weichman, P.B.; Lavely, E.M.; Ritzwoller, M.H. Surface nuclear magnetic resonance imaging of large systems. Phys. Rev. Lett. 1999, 82, 4102–4105. [Google Scholar] [CrossRef]
- Legchenko, A.; Valla, P. A review of the basic principles for proton magnetic resonance sounding measurements. J. Appl. Geophys. 2002, 50, 3–19. [Google Scholar] [CrossRef]
- Legchenko, A.; Baltassat, J.M.; Bobachev, A.; Martin, C.; Robain, H.; Vouillamoz, J.M. Magnetic resonance sounding applied to aquifer characterization. Ground Water 2004, 42, 363–373. [Google Scholar] [CrossRef] [PubMed]
- Vouillamoz, J.M.; Favreau, G.; Massuel, S.; Boucher, M.; Nazoumou, Y.; Legchenko, A. Contribution of magnetic resonance sounding to aquifer characterization and recharge estimate in semiarid Niger. J. Appl. Geophys. 2008, 64, 99–108. [Google Scholar] [CrossRef]
- Lehmann-Horn, J.A.; Hertrich, M.; Greenhalgh, S.A.; Green, A.G. On the sensitivity of surface NMR in the presence of electrical conductivity anomalies. Geophys. J. Int. 2012, 189, 331–342. [Google Scholar] [CrossRef]
- Hertrich, M. Imaging of groundwater with nuclear magnetic resonance. Prog. Nucl. Magn. Reson. Spectrosc. 2008, 53, 227–248. [Google Scholar] [CrossRef]
- Legchenko, A.; Descloitres, M.; Bost, A.; Ruiz, L.; Reddy, M.; Girard, J.-F.; Sekhar, M.; Kumar, M.S.M.; Braun, J.-J. Resolution of MRS applied to the characterization of hard-rock aquifers. Ground Water 2006, 44, 547–554. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Zhang, Y.; Wan, L.; Qu, Y.; Lin, J. A Para-Whole Space Model for Underground Magnetic Resonance Sounding Studies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 264–271. [Google Scholar] [CrossRef]
- Weichman, P.B.; Lavely, E.M.; Ritzwoller, M.H. Theory of surface nuclear magnetic resonance with applications to geophysical imaging problems. Phys. Rev. E Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 2000, 62, 1290–1312. [Google Scholar] [CrossRef]
- Legchenko, A.; Shushakov, O.A. Inversion of surface NMR data. Geophysics 1998, 63, 75–84. [Google Scholar] [CrossRef]
- Liu, D.-H.; Hu, X.-Y.; Li, Y. Understanding the effect of elliptical polarization in surface nuclear magnetic resonance method. Appl. Geophys. 2012, 9, 365–377. [Google Scholar] [CrossRef]
- Mueller-Petke, M.; Yaramanci, U. QT inversion-Comprehensive use of the complete surface NMR data set. Geophysics 2010, 75, WA199–WA209. [Google Scholar] [CrossRef]
- Müller-Petke, M.; Braun, M.; Hertrich, M.; Costabel, S.; Walbrecker, J. MRSmatlab—A software tool for processing, modeling, and inversion of magnetic resonance sounding data. Geophysics 2016, 81, 9–21. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Aquifer Location (m) | Aquifer Thickness (m) | Water Content (%) |
|---|---|---|---|
| a | 3 | 1 | 25 |
| b | 3 | 1 | 50 |
| c | 3 | 1 | 100 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, S.; Ma, Z.; Jiang, C.; Lin, J.; Xue, Y.; Shang, X.; Li, Z. Response Characteristics and Experimental Study of Underground Magnetic Resonance Sounding Using a Small-Coil Sensor. Sensors 2017, 17, 2127. https://doi.org/10.3390/s17092127
Qin S, Ma Z, Jiang C, Lin J, Xue Y, Shang X, Li Z. Response Characteristics and Experimental Study of Underground Magnetic Resonance Sounding Using a Small-Coil Sensor. Sensors. 2017; 17(9):2127. https://doi.org/10.3390/s17092127
Chicago/Turabian StyleQin, Shengwu, Zhongjun Ma, Chuandong Jiang, Jun Lin, Yiguo Xue, Xinlei Shang, and Zhiqiang Li. 2017. "Response Characteristics and Experimental Study of Underground Magnetic Resonance Sounding Using a Small-Coil Sensor" Sensors 17, no. 9: 2127. https://doi.org/10.3390/s17092127