


Sensors, Volume 17, Issue 9 (September 2017) – 228 articles
Cover Story (view full-size image):
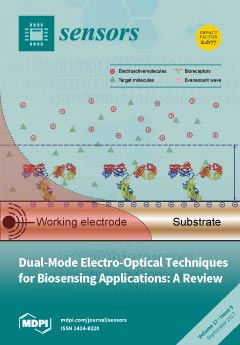
Sensing principle of dual-mode electro-optical biosensors based on evanescent wave detection. The properties of the optical mode confined in a both photonic and electrochemical compatible substrate are sensitive to the overlap between the evanescent field and the surrounding environment. A change in the local refractive index, for example due to the formation of an antibody-antigen (i.e. bioreceptor-target molecule) complex, leads to a change in the properties of the confined optical mode and to a quantifiable readout of molecular binding. These changes can also be detected, and in some cases directed, through electrochemical interrogation, which provides parallel, uncorrelated information about molecular binding to provide deeper insight into biomolecular interactions. View Paper here
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue