Characteristics of BeiDou Navigation Satellite System (BDS) Code Observations for Different Receiver Types and Their Influence on Wide-Lane Ambiguity Resolution

Abstract
:1. Introduction
2. Methodology and Datasets
2.1. Code Multipath Observable
2.2. Wide-Lane Ambiguity Resolution
2.3. Improved WL AR Method to Mitigate Low-Frequency Multipath
2.4. Datasets
3. Experimental Analysis
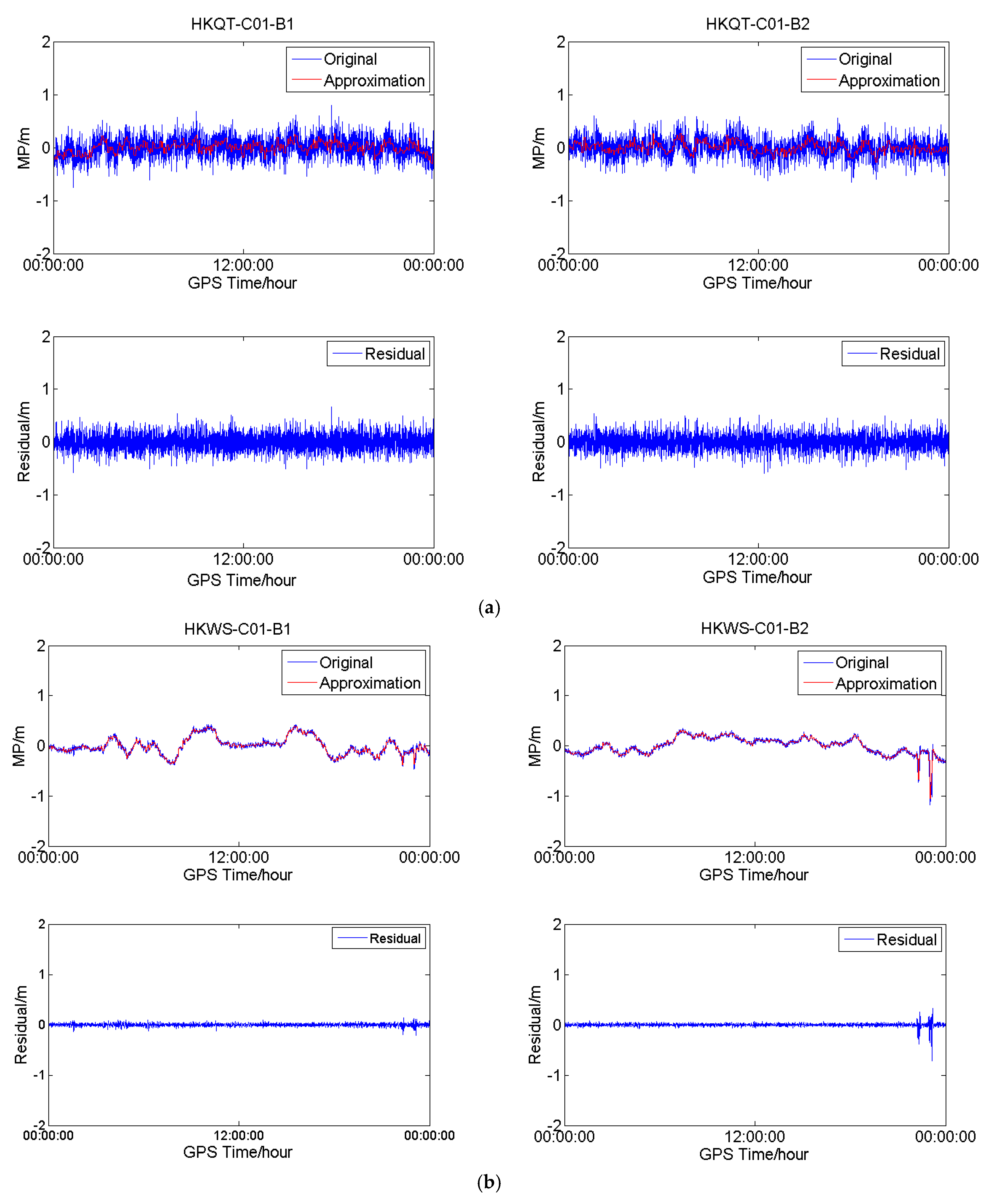
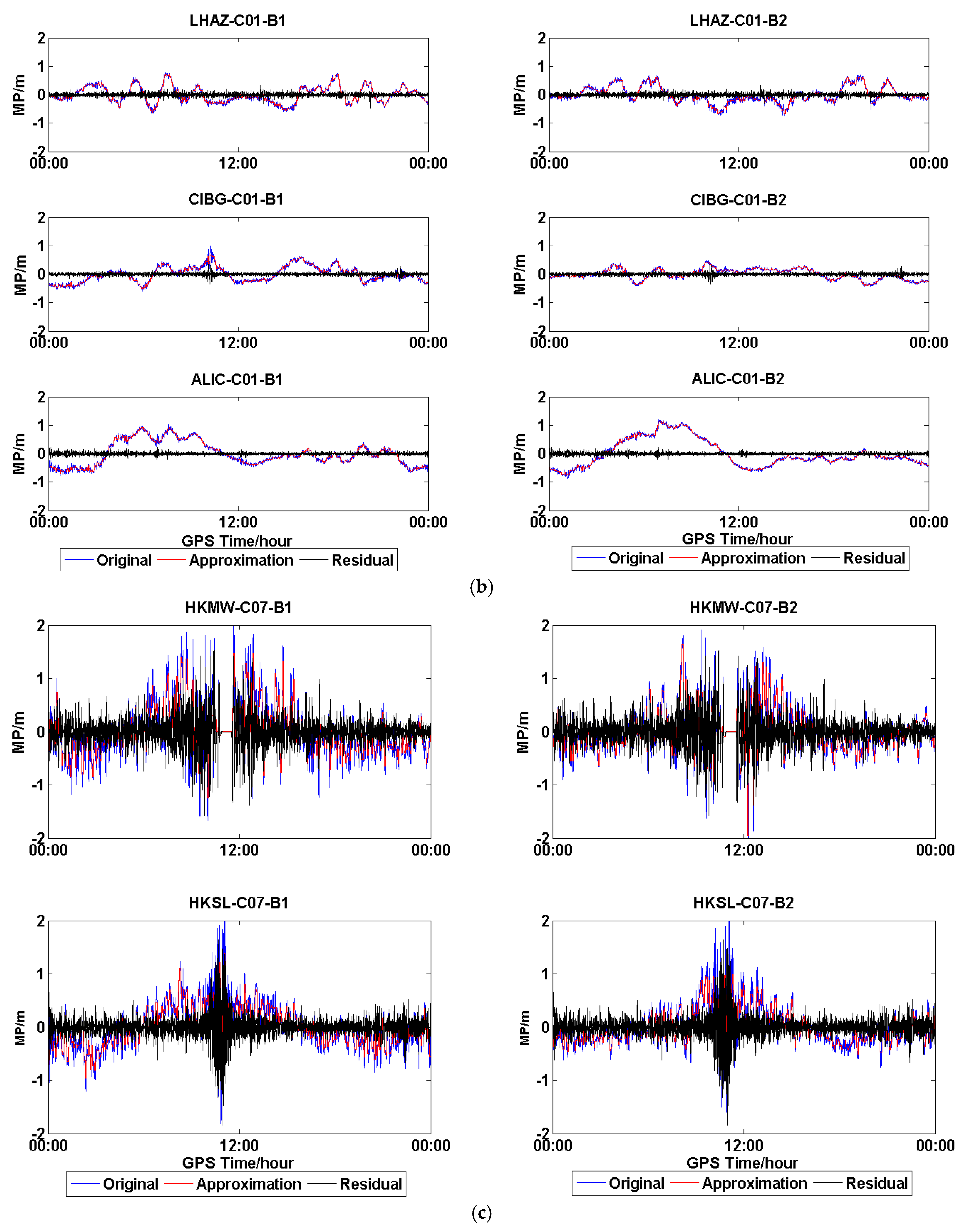
3.1. Variations of MP of BDS for Different Receiver Types
3.2. Daily Repeatability and Spatial Similarity
3.3. Characteristics of BDS MW Combinations for Different Receiver Types
3.4. Performance of the Time-Difference Method for WL AR
4. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gao, W.; Gao, C.; Pan, S. A method of GPS/BDS/GLONASS combined RTK positioning for middle-long baseline with partial ambiguity resolution. Surv. Rev. 2017, 49, 212–220. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined GPS + BDS for short to long baseline RTK positioning. Meas. Sci. Technol. 2015, 26, 045801. [Google Scholar] [CrossRef] [Green Version]
- Zou, X.; Wang, Y.; Deng, C.; Tang, W.; Li, Z.; Cui, J.; Wang, C.; Shi, C. Instantaneous BDS + GPS undifferenced NRTK positioning with dynamic atmospheric constraints. GPS Solut. 2017, 22, 17. [Google Scholar] [CrossRef]
- Wang, M.; Chai, H.; Li, Y. Performance analysis of BDS/GPS precise point positioning with undifferenced ambiguity resolution. Adv. Space Res. 2017, 60, 25812595. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Xu, P. Assessment of stochastic models for GPS measurements with different types of receivers. Chin. Sci. Bull. 2008, 53, 3219–3225. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Thoelert, S.; Erker, S.; Meurer, M.; Ashjaee, J. A multi-technique approach for characterizing the SVN49 signal anomaly, part 1: Receiver tracking and IQ constellation. GPS Solut. 2011, 16, 19–28. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, S.; Zhang, R.; Hu, H. Single-epoch real-time differential positioning with BDS triple-frequency wide-lane combination. In Proceedings of the 2017 Forum on Cooperative Positioning and Service (CPGPS), Harbin, China, 19–21 May 2017; pp. 228–231. [Google Scholar]
- He, X.; Zhang, X.; Tang, L.; Liu, W. Instantaneous Real-Time Kinematic Decimeter-Level Positioning with BeiDou Triple-Frequency Signals over Medium Baselines. Sensors 2016, 16, 1. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Sheng, R.; Gao, C.; Yu, C.; Pan, S. Dynamic Relative Positioning of GPS/BDS Based on Wide Lane Ambiguity. J. Southeast Univ. (Natur. Sci. Ed.) 2013, 43, 446–450. [Google Scholar] [CrossRef]
- Gao, G.X.; Chen, A.; Lo, S.; Lorenzo, D.D.; Walter, T.; Enge, P. Compass-M1 Broadcast Codes in E2, E5b, and E6 Frequency Bands. IEEE J. Sel. Top. Signal Process. 2009, 3, 599–612. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.-M.; Huisman, L.; Teunissen, P.J.G. Characterization of Compass M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Hu, Z.; Liu, J. Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut. 2013, 17, 103–119. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Liu, W. Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections. Sensors 2016, 16, 909. [Google Scholar] [CrossRef] [PubMed]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Zhang, X.; He, X.; Liu, W. Characteristics of systematic errors in the BDS Hatch–Melbourne–Wübbena combination and its influence on wide-lane ambiguity resolution. GPS Solut. 2017, 21, 265–277. [Google Scholar] [CrossRef]
- He, X.; Zhang, X. Characteristics Analysis of BeiDou Melbourne-Wübbena Combination. In China Satellite Navigation Conference (CSNC) 2015 Proceedings; Springer: Berlin/Heidelberg, Germany, 2015; Volume 3, pp. 31–45. [Google Scholar]
- Zhang, X.; Li, X.; Lu, C.; Wu, M.; Pan, L. A comprehensive analysis of satellite-induced code bias for BDS-3 satellites and signals. Adv. Space Res. 2017. [Google Scholar] [CrossRef]
- Wang, G.; de Jong, K.; Li, X.; Zhao, Q.; Guo, J. Analysis of Characteristics of BDS Observable Combinations for Wide-Lane Integer Ambiguity Resolution. In China Satellite Navigation Conference (CSNC) 2014 Proceedings; Springer: Berlin/Heidelberg, Germany, 2014; Volume 1, pp. 411–425. [Google Scholar]
- Wang, G.; de Jong, K.; Zhao, Q.; Hu, Z.; Guo, J. Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut. 2015, 19, 129–139. [Google Scholar] [CrossRef]
- Wübbena, G. Software Developments for Geodetic Positioning with GPS using TI-4100 Code and Carrier Measurements. In Proceedings of the 1st International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 403–412. [Google Scholar]
- Melbourne, W.G. The Case for Ranging in GPS-based Geodetic Systems. In Proceedings of the 1st International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 373–386. [Google Scholar]
- Deng, C.; Tang, W.; Cui, J.; Shen, M.; Li, Z.; Zou, X.; Zhang, Y. Triple-Frequency Code-Phase Combination Determination: A Comparison with the Hatch-Melbourne-Wübbena Combination Using BDS Signals. Remote Sens. 2018, 10, 353. [Google Scholar] [CrossRef]
- Hatch, R. The Synergism of GPS Code and Carrier Measurements. In Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1983; pp. 1213–1231. [Google Scholar]
- Liu, L.; Lü, Z.; Yu, X.; Wang, P.; Yang, D.; Zhang, L.; Cong, D. Real-time Cycle-slip Detection and Repair Algorithm of GNSS Triple-frequency Observations. Acta Geod. Cartogr. Sin. 2017, 46, 453–459. [Google Scholar]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geodesy 1998, 72, 606–612. [Google Scholar] [CrossRef] [Green Version]
- Yi, W.; Song, W.; Lou, Y.; Shi, C.; Yao, Y. A method of undifferenced ambiguity resolution for GPS + GLONASS precise point positioning. Sci. Rep. 2016, 6, 26334. [Google Scholar] [CrossRef] [PubMed]
- Geng, J. Rapid Integer Ambiguity Resolution in GPS Precise Point Positioning. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2011. Available online: http://eprints.nottingham.ac.uk/12116/ (accessed on 2 December 2011).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site ID | Site Name | Receiver Type | Firmware Version | Antenna Type | Country |
|---|---|---|---|---|---|
| HKQT | Quarry Bay | TRIMBLE NETR9 | 5.22 | TRM59900.00 | China |
| HKLM | Hung Shing Yeh Beach | TRIMBLE NETR9 | 5.22 | TRM59900.00 | China |
| HKMW | Mui Wo | LEICA GR50 | 4.02.386/7.002 | LEIAR25.R4 | China |
| HKSL | Siu Lang Shui | LEICA GR50 | 4.02.386/7.002 | LEIAR25.R4 | China |
| HKWS | Wong Shek | LEICA GR50 | 4.02.386/7.002 | LEIAR25.R4 | China |
| LHAZ | Lhasa/Tibet/China | LEICA GR25 | 4.11/6.523 | LEIAR25.R4 LEIT | China |
| CIBG | Cibinong | LEICA GR10 | 4.11/6.523 | LEIAR25.R4 NONE | Indonesia |
| ALIC | Alice Springs AU012 | LEICA GR25 | 4.11.606/6.523 | LEIAR25.R3 NONE | Australia |
| PARK | Australian Telescope National Facility | TRIMBLE NETR9 | 5.22 | ASH701945C_M NONE | Australia |
| STR2 | Stromlo | TRIMBLE NETR9 | 5.22 | LEIAR25.R3 NONE | Australia |
| YAR2 | Yarragadee | SEPT POLARX4TR | 2.9.6 | AOAD/M_T NONE | Australia |
| NNOR | New Norcia | SEPT POLARX4 | 2.9.5-extref1 | SEPCHOKE_MC NONE | Australia |
| MOBS | Melbourne Observatory | SEPT POLARX4TR | 2.9.6 | ASH701945C_M NONE | Australia |
| HOB2 | Hobart AU016 | SEPT POLARX5 | 5.10 | AOAD/M_T NONE | Australia |
| GAMG | Geochang | SEPT POLARX4TR | 2.9.6 | LEIAR25.R4 | Korea |
| MIZU | Mizusawa | JAVAD TRE_G3TH | 3.6.7 | JAV_RINGANT_G3T | Japan |
| Trimble | Leica | Septentrio | |||
|---|---|---|---|---|---|
| Baseline | Distance | Baseline | Distance | Baseline | Distance |
| HKLM-HKQT | 12.8 | HKMW-HKSL | 15.0 | NNOR-YAR2 | 236.5 |
| STR2-PARK | 266.1 | HKMW-HKWS | 39.5 | MOBS-HOB2 | 590.5 |
| Baseline | Types of Satellites Pairs | ||||||
|---|---|---|---|---|---|---|---|
| GEO-GEO | GEO-IGSO | GEO-MEO | IGSO-IGSO | IGSO-MEO | MEO-MEO | ||
| Trimble | HKLM-HKQT | 97.9 | 99.5 | 98.2 | 99.2 | 98.4 | 97.6 |
| STR2-PARK | 93.6 | 92.7 | 89.6 | 89.4 | 87.8 | 89.4 | |
| Leica | HKMW-HKSL | 73.3/94.1 | 78.1/95.2 | 72.4/93.6 | 92.22 | 91.0 | 90.9 |
| HKMW-HKWS | 70.0/94.6 | 72.3/91.5 | 59.2/87.7 | 91.1 | 92.3 | 92.2 | |
| Septentrio | NNOR-YAR2 | 94.3 | 96.3 | 92.3 | 93.8 | 94.3 | 92.7 |
| MOBS-HOB2 | 86.5 | 91.1 | 87.6 | 97.7 | 95.6 | 93.5 | |
| Baseline | Types of Satellites Pairs | ||||||
|---|---|---|---|---|---|---|---|
| GEO-GEO | GEO-IGSO | GEO-MEO | IGSO-IGSO | IGSO-MEO | MEO-MEO | ||
| Trimble | HKLM-HKQT | 11.0 | 3.0 | 5.4 | 2.0 | 4.0 | 4.4 |
| STR2-PARK | 15.6 | 3.4 | 3.7 | 4.6 | 13.0 | 9.3 | |
| Leica | HKMW-HKSL | 251.0/4.7 | 45.0/8.9 | 40.0/8.4 | 5.5 | 7.5 | 7.4 |
| HKMW-HKWS | 354.0/1.8 | 58.3/7.7 | 34.7/19.5 | 5.8 | 7.1 | 5.8 | |
| Septentrio | NNOR-YAR2 | 56.7 | 5.7 | 8.2 | 1.9 | 2.3 | 2.1 |
| MOBS-HOB2 | 40.7 | 12.0 | 8.7 | 2.0 | 3.6 | 5.3 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Wang, Z.; Ji, S.; Chen, W.; Weng, D. Characteristics of BeiDou Navigation Satellite System (BDS) Code Observations for Different Receiver Types and Their Influence on Wide-Lane Ambiguity Resolution. Sensors 2018, 18, 3546. https://doi.org/10.3390/s18103546
Lu Y, Wang Z, Ji S, Chen W, Weng D. Characteristics of BeiDou Navigation Satellite System (BDS) Code Observations for Different Receiver Types and Their Influence on Wide-Lane Ambiguity Resolution. Sensors. 2018; 18(10):3546. https://doi.org/10.3390/s18103546
Chicago/Turabian StyleLu, Yangwei, Zhenjie Wang, Shengyue Ji, Wu Chen, and Duojie Weng. 2018. "Characteristics of BeiDou Navigation Satellite System (BDS) Code Observations for Different Receiver Types and Their Influence on Wide-Lane Ambiguity Resolution" Sensors 18, no. 10: 3546. https://doi.org/10.3390/s18103546