Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing




Abstract
1. Introduction
2. Materials and Methods
2.1. Composite Bridge Description and Experiment Set-Up
2.2. Measurements and Point Cloud Processing
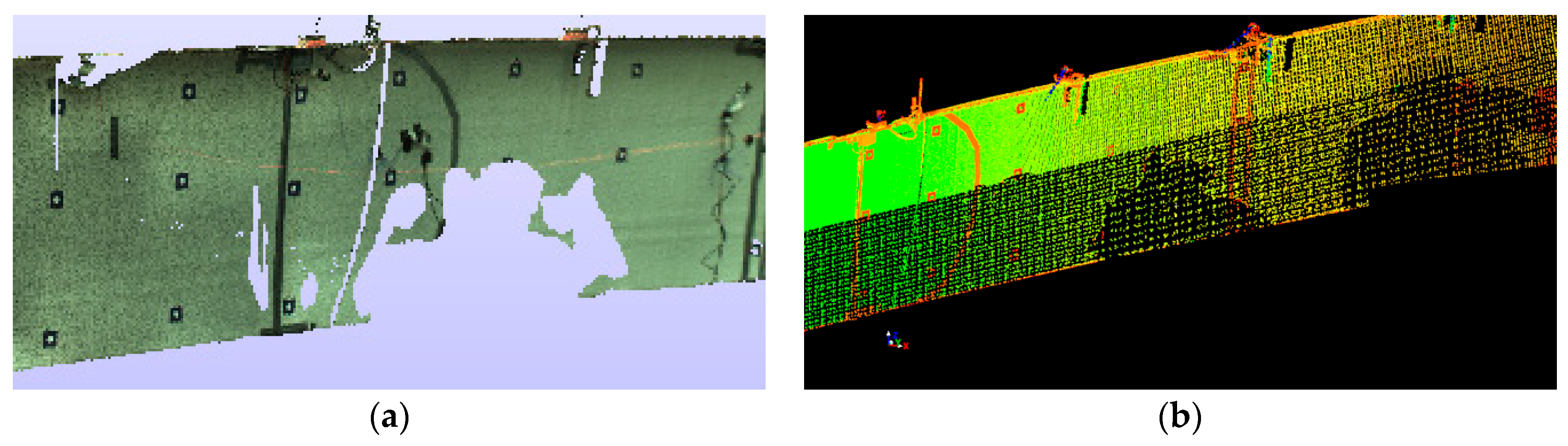
2.2.1. Pre-Processing of the Point Cloud
2.2.2. Post-Processing of the Point Cloud
3. Results: Analysis of Shape Deformation
3.1. Deformation of Bridge Diaphragm during Proof Loading
3.2. Change Detection
3.2.1. Rotation of the Bridge Diaphragm
3.2.2. FM (Fast Marching) and KD-Tree Algorithms in the Building of the Mesh Model
3.2.3. Actual Rotation of the Bridge Diaphragm
3.3. Determination of the General Deformation Trend
3.4. Spheres Translation Method (STM)
3.4.1. Application of the Spheres Translation Method
3.4.2. Comparative Analysis
3.4.3. Observations from the Comparative Analysis
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Acronym | Description |
|---|---|---|
| 1 | FM | Fast Marching algorithm |
| 2 | ICP | Iterative Closest Point |
| 3 | KD-Tree | KD-Tree algorithm |
| 4 | RANSAC | RANdom SAmple Consensu |
| 5 | STM | Spheres Translation Method |
| 6 | TIN | Triangulated Irregular Network |
| 7 | TLS | Terrestrial Laser Scanning |
References
- Riveiro, B.; Morer, P.; Arias, P.; De Arteaga, I. Terrestrial laser scanning and limit analysis of masonry arch bridges. Constr. Build. Mater. 2011, 25, 1726–1735. [Google Scholar] [CrossRef]
- Riveiro, B.; González-Jorge, H.; Varela, M.; Jauregui, D. V Validation of terrestrial laser scanning and photogrammetry techniques for the measurement of vertical underclearance and beam geometry in structural inspection of bridges. Measurement 2013, 46, 784–794. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H.; Neumann, I. Monotonic loads experiment for investigation of composite structure based on terrestrial laser scanner measurement. Compos. Struct. 2018, 183, 563–567. [Google Scholar] [CrossRef]
- Yang, H.; Xu, X.; Neumann, I. Deformation behavior analysis of composite structures under monotonic loads based on terrestrial laser scanning technology. Compos. Struct. 2018, 183, 594–599. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H.; Neumann, I. Deformation monitoring of typical composite structures based on terrestrial laser scanning technology. Compos. Struct. 2018, 202, 77–81. [Google Scholar] [CrossRef]
- Kitratporn, N.; Takeuchi, W.; Matsumoto, K.; Nagai, K. Structure deformation measurement with terrestrial laser scanner at pathein bridge in Myanmar. J. Disaster Res. 2018, 13, 40–49. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Chróścielewski, J.; Miśkiewicz, M.; Pyrzowski, Ł.; Sobczyk, B.; Wilde, K. A novel sandwich footbridge—Practical application of laminated composites in bridge design and in situ measurements of static response. Compos. Part B Eng. 2017, 126, 153–161. [Google Scholar] [CrossRef]
- Chróścielewski, J.; Miśkiewicz, M.; Pyrzowski, Ł.; Rucka, M.; Sobczyk, B.; Wilde, K. Modal properties identification of a novel sandwich footbridge—Comparison of measured dynamic response and FEA. Compos. Part B Eng. 2018, 151, 245–255. [Google Scholar] [CrossRef]
- Schreiber, T. Clustering for data reduction and approximation. Comput. Graph. Geom. 1999, 1, 1–24. [Google Scholar]
- Floater, M.S.; Iske, A. Thinning algorithms for scattered data interpolation. BIT Numer. Math. 1998, 38, 705–720. [Google Scholar] [CrossRef]
- Hou, J.; Chau, L.P.; He, Y.; Chou, P.A. Sparse Representation for Colors of 3D Point cloud Via Virtual Adaptive Sampling. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, LA, USA, 5–9 March 2017; pp. 2926–2930. [Google Scholar] [CrossRef]
- Fua, P.; Sander, P. Reconstructing Surfaces from Unstructured 3D Points. In Proceedings of the Image Understanding Workshop, San Diego, CA, USA, 26–29 January 1992; pp. 615–625. [Google Scholar]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Rob. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Davis, J.; Marschner, S.R.; Garr, M.; Levoy, M. Filling Holes in Complex Surfaces Using Volumetric Diffusion. In Proceedings of the 1st International Symposium on 3D Data Processing Visualization and Transmission (3DPVT 2002), Padova, Italy, 19–21 June 2002; pp. 428–441. [Google Scholar]
- Boissonnat, J.-D. Geometric Structures for Three-Dimensional Shape Representation. ACM Trans. Graph. 1984, 3, 266–286. [Google Scholar] [CrossRef]
- Faugeras, O.D.; Hebert, M.; Mussi, P.; Boissonnat, J.D. Polyhedral approximation of 3-D objects without holes. Comput. Vis. Graph. Image Process. 1984, 25, 169–183. [Google Scholar] [CrossRef]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface Reconstruction from Unorganized Points; ACM: New York, NY, USA, 1992; Volume 26, ISBN 0897914791. [Google Scholar]
- Curless, B.; Levoy, M. A Volumetric Method for Building Complex Models from Range Images. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, 4–9 August 1996; pp. 303–312. [Google Scholar]
- Mercat, C. Discrete Riemann surfaces and the Ising model. Commun. Math. Phys. 2001, 218, 177–216. [Google Scholar] [CrossRef]
- Carr, J.C.; Beatson, R.K.; Cherrie, J.B.; Mitchell, T.J.; Fright, W.R.; McCallum, B.C.; Evans, T.R. Reconstruction and Representation of 3D Objects with Radial Basis Functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 12–17 August 2001; pp. 67–76. [Google Scholar] [CrossRef]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. 2013, 32, 29. [Google Scholar] [CrossRef]
- Liu, Y.J.; Xu, C.X.; Fan, D.; He, Y. Efficient Construction and Simplification of Delaunay Meshes. ACM Trans. Graph. 2015, 34, 13. [Google Scholar] [CrossRef]
- Boissonnat, J.-D.; Shi, K.-L.; Tournois, J.; Yvinec, M. Anisotropic Delaunay Meshes of Surfaces. ACM Trans. Graph. 2015, 34, 1–11. [Google Scholar] [CrossRef]
- Shewchuk, J.R. Delaunay Mesh Generation; Chapman and Hall/CRC: Boca Raton, FL, USA, 2012; ISBN 9781584887300. [Google Scholar]
- Dey, T.K.; Zho, W. Approximate medial axis as a Voronoi subcomplex. In CAD Computer Aided Design; ACM: New York, NY, USA, 2004; Volume 36, pp. 195–202. [Google Scholar] [CrossRef]
- Edelsbrunner, H. Shape Reconstruction with Delaunay Complex. In Latin American Symposium on Theoretical Informatics; Springer: Berlin, Germany, 1998; pp. 119–132. [Google Scholar]
- Kolluri, R.; Shewchuk, J.R.; O’Brien, J.F. Spectral Surface Reconstruction from Noisy Point Clouds. In Proceedings of the 2004 Eurographics/ACM SIGGRAPH Symposium on Geometry Processing, Nice, France, 8–10 July 2004; p. 11. [Google Scholar] [CrossRef]
- Dey, T.K.; Goswami, S. Tight Cocone: A Water-tight Surface Reconstructor. J. Comput. Inf. Sci. Eng. 2003, 3, 302. [Google Scholar] [CrossRef]
- Boissonnat, J.D.; Gazais, F. Smooth surface reconstruction via natural neighbour interpolation of distance functions. Comput. Geom. Theory Appl. 2002, 22, 185–203. [Google Scholar] [CrossRef]
- Amenta, N.; Bern, M.; Kamvysselis, M. A New Voronoi-Based Surface Reconstruction Algorithm. In Proceedings of the 25th Annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 19–24 July 1998; pp. 415–421. [Google Scholar]
- Si, H. TetGen, a Delaunay-Based Quality Tetrahedral Mesh Generator. ACM Trans. Math. Softw. 2015, 41, 1–36. [Google Scholar] [CrossRef]
- Su, T.; Wang, W.; Lv, Z.; Wu, W.; Li, X. Rapid Delaunay triangulation for randomly distributed point cloud data using adaptive Hilbert curve. Comput. Graph. 2016, 54, 65–74. [Google Scholar] [CrossRef]
- Gonzaga de Oliveira, S.L.; Nogueira, J.R. An evaluation of point-insertion sequences for incremental Delaunay tessellations. In Computational and Applied Mathematics; Springer: Berlin, Germany, 2018; Volume 37, pp. 641–674. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D.; Roux, M. Change detection on points cloud data acquired with a ground laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Lindenbergh, R.; Pfeifer, N. A statistical deformation analysis of two epochs of terrestrial laser data of a lock. In Proceedings of the 7th Conference on Optical 3-D Measurement Techniques, Vienna, Austria, 3–5 October 2005; Vienna University of Technology: Vienna, Austria, 2005; pp. 61–70. [Google Scholar]
- Zeibak, R.; Filin, S. Change Detection via Terrestrial Laser Scanning. In Proceedings of the ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, 12–14 September 2007; pp. 430–435. [Google Scholar]
- Kang, Z.; Zhang, L.; Yue, H.; Lindenbergh, R. Range Image Techniques for Fast Detection and Quantification of Changes in Repeatedly Scanned Buildings. Photogramm. Eng. Remote Sens. 2013, 79, 695–707. [Google Scholar] [CrossRef]
- Zhang, X.; Glennie, C.; Kusari, A. LiDAR Using a Weighted Anisotropic Iterative Closest Point Algorithm. Ieee J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3338–3346. [Google Scholar] [CrossRef]
- Janowski, A.; Nagrodzka-Godycka, K.; Szulwic, J.; Ziolkowski, P. Remote sensing and photogrammetry techniques in diagnostics of concrete structures. Comput. Concr. 2016, 18, 405–420. [Google Scholar] [CrossRef]
- Szulwic, J.; Ziolkowski, P.; Janowski, A. Combined Method of Surface Flow Measurement Using Terrestrial Laser Scanning and Synchronous Photogrammetry. In Proceedings of the 2017 Baltic Geodetic Congress (BGC Geomatics) BGC Geomatics, Gdansk, Poland, 22–25 June 2017; pp. 110–115. [Google Scholar] [CrossRef]
















| Epoch | X Coordinate | Y Coordinate | Z Coordinate |
|---|---|---|---|
| Surface center | |||
| 1 | –2.112770 | 1.403070 | –0.054039 |
| 2 | –2.132400 | 1.373320 | –0.056683 |
| Normal vector | |||
| 1 | 0.835015 | –0.544994 | –0.075702 |
| 2 | 0.835581 | –0.546797 | –0.053072 |
| No. | Illustration and Description |
|---|---|
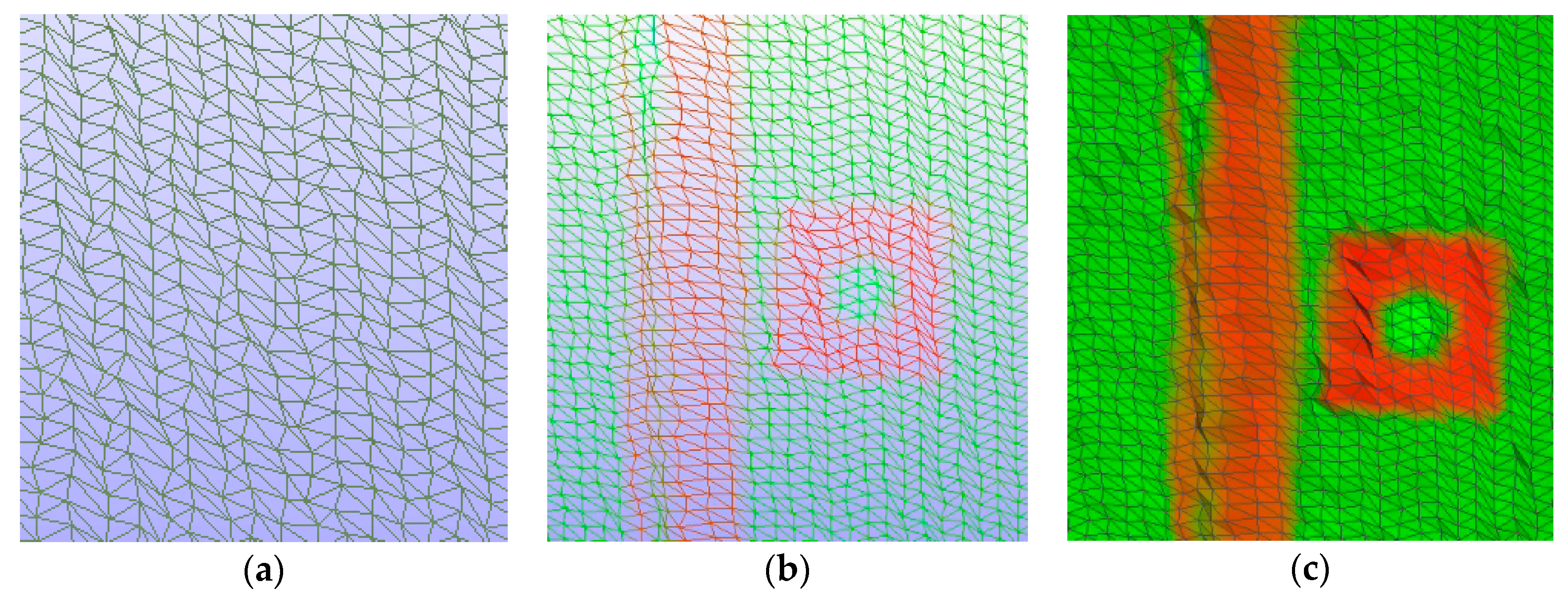
| 1 |  |
| Both scans were superimposed on one another and formed into two interpenetrating mesh models. Using the compartments of two overlapped schemes, the state of change is visible in the course of a composite bridge span overloading. | |
| 2 |  |
| Bridge span support region, where it can be seen that two mesh models penetrate each other in a uniform manner, indicating that this place shifted after the proof loading process. | |
| 3 |  |
| Bridge span the middle-bottom region, where it is visible that the two mesh models interpenetrate in a homogenous way. This indicates that this place does not shift in the perpendicular direction, but it might be seen, by looking at signal placed to the bridge, that the surface has moved in the vertical direction by a small amount. | |
| 4 |  |
| Bridge span middle-bottom region, in which it is visible that the two mesh models do not interpenetrate, indicating that this place does not shift in the perpendicular direction. | |
| 5 |  |
| On the illustration above the mesh model corresponding to the more deformed state is presented in red color. The character of the deformation is visible. Displacement of the side surface has occurred with tilting in the perpendicular direction, determined by the three-dimensional polyline in a parabolic shape. The deformation silhouette may indicate a place where increased stresses start to occur. The elliptical shape of the polyline is puzzling. We can explain it by the increased rigidity of the upper part of the lateral surface caused by the diaphragm lip, perpendicular to the plane of the shell, which closes the top. | |
| 6 |  |
| Obstacles placed between the scanned object and a scanner device cause rifts in the point cloud structure. The breaches, so-called shadows, have been caused by people who passed through in front of the lateral surface of the bridge span during measurement. | |
| 7 |  |
| The diaphragm lip of the bridge is subject to rotation. |
| Initial | Deformed | |
|---|---|---|
| Sphere code | Sphere SD2_S1 | Sphere SD2_S2 |
| Set points zone | 0.01 | 0.02 |
| X | −1.76 | −1.77 |
| Y | 1.94 | 1.95 |
| Z | 0.05 | 0.05 |
| Load Scheme | Image | Load Scheme | Image |
|---|---|---|---|
| U1: 1 + 2 |  | U1: 2 + 3 + 4 |  |
| U1: 1 + 2 + 3 |  | U1: 3 + 4 |  |
| U1: 1 + 2 + 3 + 4 |  | U1: 4 |  |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziolkowski, P.; Szulwic, J.; Miskiewicz, M. Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors 2018, 18, 4332. https://doi.org/10.3390/s18124332
Ziolkowski P, Szulwic J, Miskiewicz M. Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors. 2018; 18(12):4332. https://doi.org/10.3390/s18124332
Chicago/Turabian StyleZiolkowski, Patryk, Jakub Szulwic, and Mikolaj Miskiewicz. 2018. "Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing" Sensors 18, no. 12: 4332. https://doi.org/10.3390/s18124332
APA StyleZiolkowski, P., Szulwic, J., & Miskiewicz, M. (2018). Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors, 18(12), 4332. https://doi.org/10.3390/s18124332