Approach for the Development of a Framework for the Identification of Activities of Daily Living Using Sensors in Mobile Devices

 ,
,  ,
, 
 and
and 
Abstract
1. Introduction
2. Related Work
2.1. Sensors
2.2. Data Acquisition
2.3. Data Processing
2.3.1. Data Cleaning
2.3.2. Data Imputation
2.3.3. Feature Extraction
2.4. Data Fusion
2.5. Identification of Activities of Daily Living
2.5.1. Machine Learning
2.5.2. Pattern Recognition
2.6. Relation between the Identification of Activities of Daily Living and User Agenda
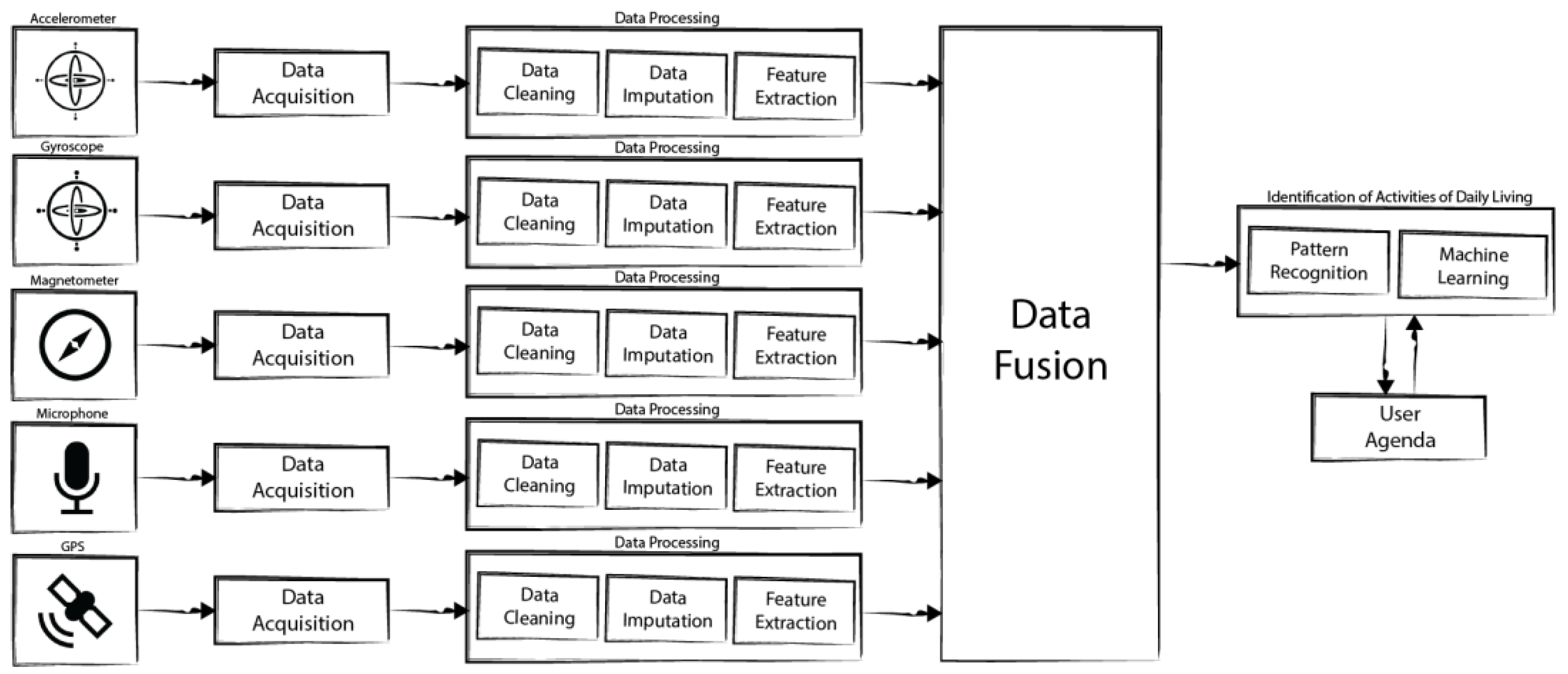
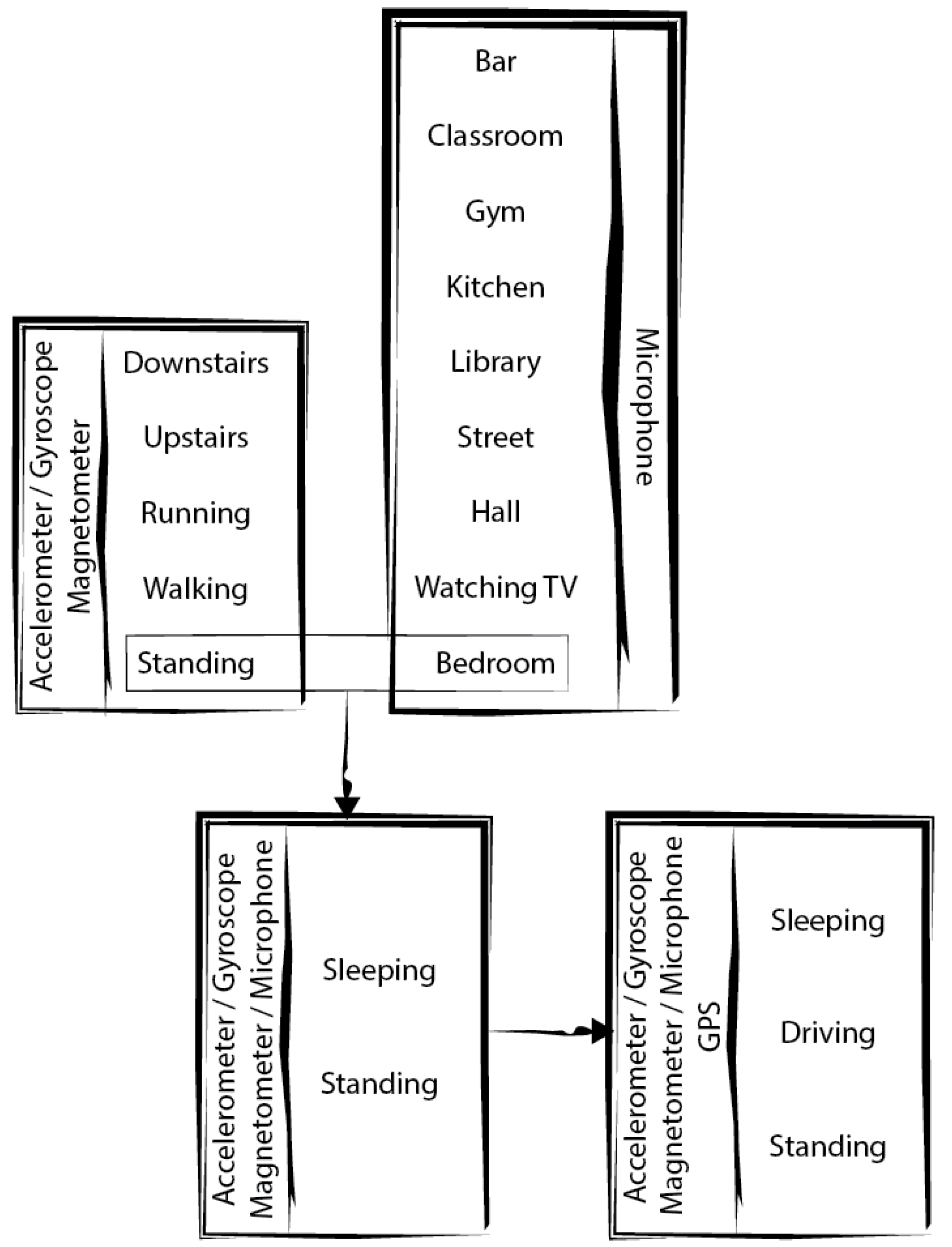
3. Methods and Expected Results
- Firstly, the ADL are recognized with motion and magnetic/mechanical sensors;
- Secondly, the identification of the environments is performed with acoustic sensors;
- Finally, there are two options, being these:
- ○
- The identification of standing activities with the fusion of the data acquired from motion and magnetic/mechanical sensors, and the environment recognized, where the number of ADL recognized depends on the number of sensors available;
- ○
- The identification of standing activities with the fusion of the data acquired from motion, magnetic/mechanical and location sensors, and the environment recognized, where the number of ADL recognized depends on the number of sensors available.
- MLP with Backpropagation;
- FNN with Backpropagation;
- DNN.
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Salazar, L.H.A.; Lacerda, T.; Nunes, J.V.; von Wangenheim, C.G. A Systematic Literature Review on Usability Heuristics for Mobile Phones. Int. J. Mob. Hum. Comput. Interact. 2013, 5, 50–61. [Google Scholar] [CrossRef]
- Foti, D.; Koketsu, J.S. Activities of daily living. In Pedretti’s Occupational Therapy: Practical Skills for Physical Dysfunction; Elsevier Health Sciences: Amsterdam, Netherlands, 2013; Volume 7, pp. 157–232. [Google Scholar]
- Garcia, N.M. A Roadmap to the Design of a Personal Digital Life Coach. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 399. [Google Scholar]
- Kleinberger, T.; Becker, M.; Ras, E.; Holzinger, A.; Müller, P. Ambient intelligence in assisted living: Enable elderly people to handle future interfaces. In Lecture Notes in Computer Science; Springer: Berlin, Germany, 2007; Volume 4555. [Google Scholar]
- Singh, D.; Kropf, J.; Hanke, S.; Holzinger, A. Ambient Assisted Living Technologies from the Perspectives of Older People and Professionals. In Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10410. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. From Data Acquisition to Data Fusion: A Comprehensive Review and a Roadmap for the Identification of Activities of Daily Living Using Mobile Devices. Sensors 2016, 16, 184. [Google Scholar] [CrossRef] [PubMed]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Zdravevski, E.; Spinsante, S. Machine Learning Algorithms for the Identification of Activities of Daily Living Using Mobile Devices: A Comprehensive Review. engrXiv, engrxiv.org/k6rxa. 2018. (In Review) [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Flórez-Revuelta, F. Multi-sensor data fusion techniques for the identification of activities of daily living using mobile devices. In Proceedings of the ECMLPKDD 2015 ECML PKDD—European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, Porto, Portugal, 7–11 September 2015. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F. Identification of Activities of Daily Living Using Sensors Available in off-the-shelf Mobile Devices: Research and Hypothesis. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 476. [Google Scholar]
- Smartphones: BQ Aquaris and BQ Portugal. Available online: https://www.bq.com/pt/smartphones (accessed on 2 September 2017).
- Banos, O.; Damas, M.; Pomares, H.; Rojas, I. On the use of sensor fusion to reduce the impact of rotational and additive noise in human activity recognition. Sensors 2012, 12, 8039–8054. [Google Scholar] [CrossRef] [PubMed]
- Akhoundi, M.A.A.; Valavi, E. Multi-Sensor Fuzzy Data Fusion Using Sensors with Different Characteristics. arXiv preprint, 2010; arXiv:1010.6096. [Google Scholar]
- Paul, P.; George, T. An Effective Approach for Human Activity Recognition on Smartphone. In Proceedings of the 2015 IEEE International Conference on Engineering and Technology (ICETECH), Coimbatore, India, 20–20 March 2015; pp. 45–47. [Google Scholar]
- Hsu, Y.W.; Chen, K.H.; Yang, J.J.; Jaw, F.S. Smartphone-based fall detection algorithm using feature extraction. In Proceedings of the 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15–17 October 2016. [Google Scholar]
- Dernbach, S.; Das, B.; Krishnan, N.C.; Thomas, B.L.; Cook, D.J. Simple and Complex Activity Recognition through Smart Phones. In Proceedings of the 8th International Conference on Intelligent Environments (IE), Guanajuato, Mexico, 26–29 June 2012. [Google Scholar]
- Shen, C.; Chen, Y.F.; Yang, G.S. On Motion-Sensor Behavior Analysis for Human-Activity Recognition via Smartphones. In Proceedings of the 2016 Ieee International Conference on Identity, Security and Behavior Analysis (ISBA), Sendai, Japan, 29 February–2 March 2016. [Google Scholar]
- Misra, A.; Lim, L. Optimizing Sensor Data Acquisition for Energy-Efficient Smartphone-Based Continuous Event Processing. In Proceedings of the 12th IEEE International Conference on Mobile Data Management (MDM), Lulea, Sweden, 6–9 June 2011; pp. 88–97. [Google Scholar]
- D’Ambrosio, A.; Aria, M.; Siciliano, R. Accurate Tree-based Missing Data Imputation and Data Fusion within the Statistical Learning Paradigm. J. Classif. 2012, 29, 227–258. [Google Scholar] [CrossRef]
- Dong, J.; Zhuang, D.; Huang, Y.; Fu, J. Advances in multi-sensor data fusion: algorithms and applications. Sensors 2009, 9, 7771–7784. [Google Scholar] [CrossRef] [PubMed]
- King, R.C.; Villeneuve, E.; White, R.J.; Sherratt, R.S.; Holderbaum, W.; Harwin, W.S. Application of data fusion techniques and technologies for wearable health monitoring. Med. Eng. Phys. 2017, 42, 1–12. [Google Scholar] [CrossRef] [PubMed]
- White, R.M. A Sensor Classification Scheme. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1987, 34, 124–126. [Google Scholar] [CrossRef] [PubMed]
- Bojinov, H.; Michalevsky, Y.; Nakibly, G.; Boneh, D. Mobile device identification via sensor fingerprinting. arXiv preprint, 2014; arXiv:1408.1416. [Google Scholar]
- Katevas, K.; Haddadi, H.; Tokarchuk, L. Sensingkit: Evaluating the sensor power consumption in ios devices. In Proceedings of the 12th International Conference on Intelligent Environments (IE), London, UK, 14–16 September 2016. [Google Scholar]
- Bersch, S.D.; Azzi, D.; Khusainov, R.; Achumba, I.E.; Ries, J. Sensor data acquisition and processing parameters for human activity classification. Sensors 2014, 14, 4239–4270. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.; Lee, Y.; Min, C.; Ju, Y.; Park, T.; Lee, J.; Rhee, Y.; Song, J. Orchestrator: An active resource orchestration framework for mobile context monitoring in sensor-rich mobile environments. In Proceedings of the 2010 IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010. [Google Scholar]
- Vallina-Rodriguez, N.; Crowcroft, J. ErdOS: Achieving energy savings in mobile OS. In Proceedings of the sixth international workshop on MobiArch, Bethesda, MD, USA, 28 June 2011; pp. 37–42. [Google Scholar]
- Priyantha, B.; Lymberopoulos, D.; Jie, L. LittleRock: Enabling Energy-Efficient Continuous Sensing on Mobile Phones. IEEE Pervasive Comput. 2011, 10, 12–15. [Google Scholar] [CrossRef]
- Lu, H.; Yang, J.; Liu, Z.; Lane, N.D.; Choudhury, T.; Campbell, A.T. The Jigsaw continuous sensing engine for mobile phone applications. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zürich, Switzerland, 3–5 November 2010; pp. 71–84. [Google Scholar]
- Rachuri, K.K.; Mascolo, C.; Musolesi, M.; Rentfrow, P.J. SociableSense: Exploring the trade-offs of adaptive sampling and computation offloading for social sensing. In Proceedings of the 17th annual international conference on Mobile computing and networking, Las Vegas, NV, USA, 19–23 September 2011; pp. 73–84. [Google Scholar]
- Gupta, H.P.; Chudgar, H.S.; Mukherjee, S.; Dutta, T.; Sharma, K. A continuous hand gestures recognition technique for human-machine interaction using accelerometer and gyroscope sensors. IEEE Sens. J. 2016, 16, 6425–6432. [Google Scholar] [CrossRef]
- Deshpande, A.; Guestrin, C.; Madden, S.R.; Hellerstein, J.M.; Hong, W. Model-driven data acquisition in sensor networks. In Proceedings of the Thirtieth International Conference on Very Large Data Bases—2004, VLDB Endowment, Toronto, Canada, 31 August–3 September 2004; Volume 30, pp. 588–599. [Google Scholar]
- Kubota, H.; Kyokane, M.; Imai, Y.; Ando, K.; Masuda, S.I. A Study of Data Acquisition and Analysis for Driver’s Behavior and Characteristics through Application of Smart Devices and Data Mining. In Proceedings of the Third International Conference on Computer Science, Computer Engineering, and Education Technologies, Lodz, Poland, 19–21 September 2016. [Google Scholar]
- Ayu, M.A.; Mantoro, T.; Matin, A.F.A.; Basamh, S.S. Recognizing user activity based on accelerometer data from a mobile phone. In Proceedings of the 2011 IEEE Symposium on Computers & Informatics (ISCI), Kuala Lumpur, Malaysia, 20–23 March 2011. [Google Scholar]
- Banos, O.; Garcia, R.; Holgado-Terriza, J.A.; Damas, M.; Pomares, H.; Rojas, I.; Saez, A.; Villalonga, C. mHealthDroid: A novel framework for agile development of mobile health applications. In Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2014; Volume 8868. [Google Scholar]
- Chavan, V.B.; Mhala, N. Development of Hand Gesture Recognition Framework Using Surface EMG and Accelerometer Sensor for Mobile Devices. 2015. Available online: https://www.irjet.net/archives/V2/i5/IRJET-V2I542.pdf (accessed on 23 December 2017).
- Sarkar, M.; Haider, M.Z.; Chowdhury, D.; Rabbi, G. An Android based human computer interactive system with motion recognition and voice command activation. In Proceedings of the 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016. [Google Scholar]
- Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Rodríguez, N.D. Validation Techniques for Sensor Data in Mobile Health Applications. J. Sens. 2016, 2016, 2839372. [Google Scholar] [CrossRef]
- Lane, N.D.; Miluzzo, E.; Lu, H.; Peebles, D.; Choudhury, T.; Campbell, A.T. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48. [Google Scholar] [CrossRef]
- Banos, O.; Toth, M.A.; Damas, M.; Pomares, H.; Rojas, I. Dealing with the effects of sensor displacement in wearable activity recognition. Sensors 2014, 14, 9995–10023. [Google Scholar] [CrossRef] [PubMed]
- Pejovic, V.; Musolesi, M. Anticipatory Mobile Computing. ACM Comput. Surv. 2015, 47, 1–29. [Google Scholar] [CrossRef]
- Lin, F.X.; Rahmati, A.; Zhong, L. Dandelion: A framework for transparently programming phone-centered wireless body sensor applications for health. In Proceedings of the 10th Wireless Health, San Diego, CA, USA, 5–7 October 2010. [Google Scholar]
- Postolache, O.; Girão, P.S.; Ribeiro, M.; Guerra, M.; Pincho, J.; Santiago, F.; Pena, A. Enabling telecare assessment with pervasive sensing and Android OS smartphone. In Proceedings of the 2011 IEEE International Workshop on Medical Measurements and Applications Proceedings (MeMeA), Bari, Italy, 30–31 May 2011. [Google Scholar]
- Jeffery, S.R.; Alonso, G.; Franklin, M.J.; Hong, W.; Widom, J. Declarative Support for Sensor Data Cleaning. In Lecture Notes in Computer Science; Springer: Berlin, Germany, 2006; Volume 2006. [Google Scholar]
- Tomar, D.; Agarwal, S. A survey on pre-processing and post-processing techniques in data mining. Int. J. Database Theory Appl. 2014, 7, 99–128. [Google Scholar] [CrossRef]
- Park, K.; Becker, E.; Vinjumur, J.K.; Le, Z.; Makedon, F. Human behavioral detection and data cleaning in assisted living environment using wireless sensor networks. In Proceedings of the 2nd International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 9–13 June 2009. [Google Scholar]
- Zhuang, Y.; Chen, L.; Wang, X.S.; Lian, J. A weighted moving average-based approach for cleaning sensor data. In Proceedings of the 27th International Conference on Distributed Computing Systems (ICDCS'07), Toronto, ON, Canada, 25–27 June 2007. [Google Scholar]
- Li, Z.; Wang, J.; Gao, J.; Li, B.; Zhou, F. A vondrak low pass filter for IMU sensor initial alignment on a disturbed base. Sensors 2014, 14, 23803–23821. [Google Scholar] [CrossRef] [PubMed]
- Graizer, V. Effect of low-pass filtering and re-sampling on spectral and peak ground acceleration in strong-motion records. In Proceedings of the 15th World Conference of Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- UiO: Fourier Analysis and Applications to Sound Processing. Available online: http://www.uio.no/studier/emner/matnat/math/MAT.../v12/part1.pdf (accessed on 27 August 2017).
- Ninness, B. Spectral Analysis Using the FFT. Available online: https://pdfs.semanticscholar.org/dd74/4c224d569bd9ae907b7527e7f2a92fafa19c.pdf (accessed on 27 August 2017).
- Vateekul, P.; Sarinnapakorn, K. Tree-Based Approach to Missing Data Imputation. In Proceedings of the IEEE International Conference on 2009 Data Mining Workshops (ICDMW '09), Miami, FL, USA, 6 December 2009; pp. 70–75. [Google Scholar]
- Ling, W.; Dong, M. Estimation of Missing Values Using a Weighted K-Nearest Neighbors Algorithm. In Proceedings of the International Conference on 2009 Environmental Science and Information Application Technology (ESIAT 2009), Wuhan, China; pp. 660–663.
- García-Laencina, P.J.; Sancho-Gómez, J.L.; Figueiras-Vidal, A.R.; Verleysen, M. K nearest neighbours with mutual information for simultaneous classification and missing data imputation. Neurocomputing 2009, 72, 1483–1493. [Google Scholar] [CrossRef]
- Rahman, S.A.; Rahman, S.A.; Huang, Y.; Claassen, J.; Kleinberg, S. Imputation of Missing Values in Time Series with Lagged Correlations. In Proceedings of the 2014 IEEE International Conference on Data Mining Workshop (ICDMW), Shenzhen, China, 14 December 2014. [Google Scholar]
- Batista, G.E.; Monard, M.C. A Study of K-Nearest Neighbour as an Imputation Method. HIS 2002, 87, 251–260. [Google Scholar]
- Hruschka, E.R.; Hruschka, E.R.; Ebecken, N.F.F. Towards Efficient Imputation by Nearest-Neighbors: A Clustering-Based Approach. In AI 2004: Advances in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2004; pp. 513–525. [Google Scholar]
- Luo, J.W.; Yang, T.; Wang, Y. Missing value estimation for microarray data based on fuzzy C-means clustering. In Proceedings of the Eighth International Conference on High-Performance Computing in Asia-Pacific Region, Beijing, China, 30 November–3 December 2005. [Google Scholar]
- Ni, D.; Leonard, J.D.; Guin, A.; Feng, C. Multiple Imputation Scheme for Overcoming the Missing Values and Variability Issues in ITS Data. J. Trans. Eng. 2005, 131, 931–938. [Google Scholar] [CrossRef]
- Smith, B.; Scherer, W.; Conklin, J. Exploring Imputation Techniques for Missing Data in Transportation Management Systems. Trans. Res. Rec. 2003, 1836, 132–142. [Google Scholar] [CrossRef]
- Qu, L.; Zhang, Y.; Hu, J.; Jia, L.; Li, L. A BPCA based missing value imputing method for traffic flow volume data. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 985–990. [Google Scholar]
- Jiang, N.; Gruenwald, L. Estimating Missing Data in Data Streams. In Proceedings of the 12th International Conference on Database Systems for Advanced Applications (DASFAA'07), Bangkok, Thailand, 9–12 April 2007; pp. 981–987. [Google Scholar]
- Rahman, S.A.; Huang, Y.; Claassen, J.; Heintzman, N.; Kleinberg, S. Combining Fourier and lagged k-nearest neighbor imputation for biomedical time series data. J. Biomed. Inform. 2015, 58, 198–207. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.-Y.; Li, W.; Chen, K.; Xiang, X.-H.; Pan, R.; Li, L.; Cai, W.-X. Multi-matrices factorization with application to missing sensor data imputation. Sensors 2013, 13, 15172–15186. [Google Scholar] [CrossRef] [PubMed]
- Rahman, S.A.; Huang, Y.; Claassen, J.; Kleinberg, S. Imputation of missing values in time series with lagged correlations. In Proceedings of the 2014 IEEE International Conference on Data Mining Workshop (ICDMW), Shenzhen, China, 14 December 2014; pp. 753–762. [Google Scholar]
- Smaragdis, P.; Raj, B.; Shashanka, M. Missing Data Imputation for Time-Frequency Representations of Audio Signals. J. Signal Process. Syst. 2010, 65, 361–370. [Google Scholar] [CrossRef]
- Bayat, A.; Pomplun, M.; Tran, D.A. A Study on Human Activity Recognition Using Accelerometer Data from Smartphones. In Proceedings of the 9th International Conference on Future Networks and Communications (Fnc'14)/the 11th International Conference on Mobile Systems and Pervasive Computing (Mobispc'14)/Affiliated Workshops, Ontario, Canada, 17–20 August 2014; pp. 450–457. [Google Scholar]
- Khalifa, S.; Hassan, M.; Seneviratne, A. Feature selection for floor-changing activity recognition in multi-floor pedestrian navigation. In Proceedings of the 2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Singapore, 6–8 January 2014. [Google Scholar]
- Zhao, K.L.; Du, J.; Li, C.; Zhang, C.; Liu, H.; Xu, C. Healthy: A Diary System Based on Activity Recognition Using Smartphone. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems (Mass 2013), Hangzhou, China, 14–16 October 2013; pp. 290–294. [Google Scholar]
- Zainudin, M.N.S.; Sulaiman, M.N.; Mustapha, N.; Perumal, T. Activity Recognition based on Accelerometer Sensor using Combinational Classifiers. In Proceedings of the 2015 IEEE Conference on Open Systems (ICOS), Bandar Melaka, Malaysia, 24–26 August 2015; pp. 68–73. [Google Scholar]
- Fan, L.; Wang, Z.M.; Wang, H. Human activity recognition model based on decision tree. In Proceedings of the 2013 International Conference on Advanced Cloud and Big Data (CBD), Nanjing, China, 13–15 December 2013; pp. 64–68. [Google Scholar]
- Liu, Y.Y.; Fang, Z.; Wenhua, S.; Haiyong, Z. An Hidden Markov Model based Complex Walking Pattern Recognition Algorithm. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (IEEE UPINLBS 2016), Shanghai, China, 2–4 November 2016; pp. 223–229. [Google Scholar]
- Piyare, R.; Lee, S.R. Mobile Sensing Platform for Personal Health Management. In Proceedings of the 18th IEEE International Symposium on Consumer Electronics (ISCE 2014), JeJu Island, South Korea, 22–25 June 2014; pp. 1–2. [Google Scholar]
- Chen, Y.F.; Shen, C. Performance Analysis of Smartphone-Sensor Behavior for Human Activity Recognition. IEEE Access 2017, 5, 3095–3110. [Google Scholar] [CrossRef]
- Vavoulas, G.; Chatzaki, C.; Malliotakis, T.; Pediaditis, M.; Tsiknakis, M. The MobiAct Dataset: Recognition of Activities of Daily Living using Smartphones. In Proceedings of the International Conference on Information and Communication Technologies for Ageing Well and E-Health (ICT4AWE), Rome, Italy, 21–22 April 2016; pp. 143–151. [Google Scholar]
- Torres-Huitzil, C.; Nuno-Maganda, M. Robust smartphone-based human activity recognition using a tri-axial accelerometer. In Proceedings of the 2015 IEEE 6th Latin American Symposium on Circuits & Systems (Lascas), Montevideo, Uruguay, 24–27 February 2015; pp. 1–4. [Google Scholar]
- Anjum, A.; Ilyas, M.U. Activity Recognition Using Smartphone Sensors. In Proceedings of the 2013 IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, USA, 11–14 January 2013; pp. 914–919. [Google Scholar]
- Kumar, A.; Gupta, S. Human Activity Recognition through Smartphone’s Tri-Axial Accelerometer using Time Domain Wave Analysis and Machine Learning. Int. Comput. Appl. 2015, 127, 22–26. [Google Scholar]
- Hon, T.K.; Wang, L.; Reiss, J.D.; Cavallaro, A. Audio Fingerprinting for Multi-Device Self-Localization. IEEE/ACM Trans. Audio, Speech Lang. Process. 2015, 23, 1623–1636. [Google Scholar] [CrossRef]
- Sert, M.; Baykal, B.; Yazici, A. A Robust and Time-Efficient Fingerprinting Model for Musical Audio. In Proceedings of the 2006 IEEE International Symposium on Consumer Electronics, St. Petersburg, Russia, 28 June–1 July 2007. [Google Scholar]
- Ramalingam, A.; Krishnan, S. Gaussian Mixture Modeling of Short-Time Fourier Transform Features for Audio Fingerprinting. IEEE Trans. Inform. Forens. Secur. 2006, 1, 457–463. [Google Scholar] [CrossRef]
- Vincenty, T. Direct and Inverse Solutions of Geodesics on the Ellipsoid with Application of Nested equations. Surv. Rev. 1975, 22, 88–93. [Google Scholar] [CrossRef]
- Karney, C.F.F. Algorithms for Geodesics. J. Geodesy 2013, 87, 43–55. [Google Scholar] [CrossRef]
- Karney, C.F.F.; Deakin, R.E. The calculation of longitude and latitude from geodesic measurements. Astron. Nachr. 2010, 331, 852–861. [Google Scholar] [CrossRef]
- Khaleghi, B.; Khamisa, A.; Karraya, F.O.; Razavib, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Pombo, N.; Bousson, K.; Araújo, P.; Viana, J. Medical decision-making inspired from aerospace multisensor data fusion concepts. Inform Health Soc. Care 2015, 40, 185–197. [Google Scholar] [CrossRef] [PubMed]
- Durrant-Whyte, H.; Stevens, M.; Nettleton, E. Data fusion in decentralised sensing networks. In Proceedings of the 4th International Conference on Information Fusion, Montreal, Canada, 7–10 August 2001. [Google Scholar]
- Tanveer, F.; Waheed, O.T.; Atiq-ur-Rehman. Design and Development of a Sensor Fusion based Low Cost Attitude Estimator. J. Space Technol. 2011, 1, 45–50. [Google Scholar]
- Ko, M.H.; Westa, G.; Venkatesha, S.; Kumarb, M. Using dynamic time warping for online temporal fusion in multisensor systems. Inf. Fusion 2008, 9, 370–388. [Google Scholar] [CrossRef]
- Singh, D.; Merdivan, E.; Psychoula, I.; Kropf, J.; Hanke, S.; Geist, M.; Holzinger, A. Human activity recognition using recurrent neural networks. In Proceedings of the International Cross-Domain Conference for Machine Learning and Knowledge Extraction, Reggio, Italy, 29 August–1 September 2017. [Google Scholar]
- Zhao, L.; Wu, P.; Cao, H. RBUKF Sensor Data Fusion for Localization of Unmanned Mobile Platform. Res. J. Appl. Sci. Eng. Technol. 2013, 6, 3462–3468. [Google Scholar] [CrossRef]
- Walter, O.; Schmalenstroeer, J.; Engler, A.; Haeb-Umbach, R. Smartphone-based sensor fusion for improved vehicular navigation. In Proceedings of the 2013 10th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 20–21 March 2013. [Google Scholar]
- Grunerbl, A.; Muaremi, A.; Osmani, V.; Bahle, G.; Ohler, S.; Tröster, G.; Mayora, O.; Haring, C.; Lukowicz, P. Smart-Phone Based Recognition of States and State Changes in Bipolar Disorder Patients. IEEE J. Biomed. Health Inform. 2015, 15, 140–148. [Google Scholar] [CrossRef] [PubMed]
- Thatte, G.; Li, M.; Lee, S.; Emken, B.A.; Annavaram, M.; Narayanan, S.; Narayanan, D.; Mitra, U. Optimal Time-Resource Allocation for Energy-Efficient Physical Activity Detection. IEEE Trans. Signal Process 2011, 59, 1843–1857. [Google Scholar] [CrossRef] [PubMed]
- Bhuiyan, M.Z.H.; Kuusniemi, H.; Chen, L.; Pei, L.; Ruotsalainen, L.; Guinness, R.; Chen, R. Performance Evaluation of Multi-Sensor Fusion Models in Indoor Navigation. Eur. J. Navig. 2013, 11, 21–28. [Google Scholar]
- Bellos, C.; Papadopoulos, A.; Rosso, R.; Fotiadis, D.I. Heterogeneous data fusion and intelligent techniques embedded in a mobile application for real-time chronic disease management. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2011, 2011, 8303–8306. [Google Scholar] [PubMed]
- Ayachi, F.S.; Nguyen, H.; Goubault, E.; Boissy, P.; Duval, C. The use of empirical mode decomposition-based algorithm and inertial measurement units to auto-detect daily living activities of healthy adults. IEEE Trans. Neural Syst. Rehabilit. Eng. 2016, 24, 1060–1070. [Google Scholar] [CrossRef] [PubMed]
- Debes, C.; Merentitis, A.; Sukhanov, S.; Niessen, M.; Frangiadakis, N.; Bauer, A. Monitoring activities of daily living in smart homes: Understanding human behavior. IEEE Signal Process. Mag. 2016, 33, 81–94. [Google Scholar] [CrossRef]
- Koza, J.R.; Bennett, F.H.; Andre, D.; Keane, M.A. Automated design of both the topology and sizing of analog electrical circuits using genetic programming. In Artificial Intelligence in Design’96; Springer: Berlin, Germany, 1996; pp. 151–170. [Google Scholar]
- Russell, S.; Norvig, P.; Canny, C.F.; Malik, J.M.A. Artificial Intelligence: A Modern Approach; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Du, K.-L.; Swamy, M.N.S. Fundamentals of Machine Learning. In Neural Networks and Statistical Learning; Springer: Berlin, Germany, 2014; pp. 15–65. [Google Scholar]
- Zhang, Y.; Rajapakse, J.C. Machine Learning in Bioinformatics; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Witten, I.H.; Frank, E.; Hall, M.A. Data Mining: Practical Machine Learning Tools and Techniques; Morgan Kaufmann: Burlington, MA, USA, 2016. [Google Scholar]
- Schapire, R.E. The boosting approach to machine learning: An overview. In Nonlinear Estimation and Classification; Springer: Berlin, Germany, 2003; pp. 149–171. [Google Scholar]
- Michalski, R.S.; Carbonell, J.G.; Mitchell, T.M.X. Machine Learning: An Artificial Intelligence Approach; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin, Germany, 2006. [Google Scholar]
- Lorenzi, P.; Rao, R.; Romano, G.; Kita, A.; Irrera, F. Mobile Devices for the Real-Time Detection of Specific Human Motion Disorders. IEEE Sens. J. 2016, 16, 8220–8227. [Google Scholar]
- Lau, S.L.; König, I.; David, K.; Parandian, B.; Carius-Düssel, C.; Schultz, M. Supporting patient monitoring using activity recognition with a smartphone. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems (ISWCS), York, UK, 19–22 September 2010. [Google Scholar]
- Lau, S.L. Comparison of orientation-independent-based-independent-based movement recognition system using classification algorithms. In Proceedings of the 2013 IEEE Symposium on Wireless Technology and Applications (ISWTA), Kuching, Malaysia, 22–25 September 2013. [Google Scholar]
- Duarte, F.; Lourenco, A.; Abrantes, A. Activity classification using a smartphone. In Proceedings of the 2013 IEEE 15th International Conference on e-Health Networking, Applications & Services (Healthcom), Lisbon, Portugal, 9–12 October 2013. [Google Scholar]
- Fahim, M.; Lee, S.; Yoon, Y. SUPAR: Smartphone as a ubiquitous physical activity recognizer for u-healthcare services. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2014, 2014, 3666–3669. [Google Scholar] [PubMed]
- Bajpai, A.; Jilla, V.; Tiwari, V.N.; Venkatesan, S.M.; Narayanan, R. Quantifiable fitness tracking using wearable devices. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Nguyen, P.; Akiyama, T.; Ohashi, H.; Nakahara, G.; Yamasaki, K.; Hikaru, S. User-friendly Activity Recognition Using SVM Classifier and Informative Features. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (Ipin), Banff, AB, Canada, 13–16 October 2015; pp. 1–8. [Google Scholar]
- Wang, C.; Xu, Y.; Zhang, J.; Yu, W. SW-HMM: A Method for Evaluating Confidence of Smartphone-Based Activity Recognition. In Proceedings of the 2016 IEEE Trustcom/BigDataSE/ISPA, Tianjin, China, 23–26 August 2016. [Google Scholar]
- Lau, S.L.; David, K. Movement recognition using the accelerometer in smartphones. In Proceedings of the Future Network and Mobile Summit, Florence, Italy, 16–18 June 2010. [Google Scholar]
- Zhang, L.; Wu, X.; Luo, D. Real-Time Activity Recognition on Smartphones Using Deep Neural Networks. In Proceedings of the Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015. [Google Scholar]
- Cardoso, N.; Madureira, J.; Pereira, N. Smartphone-based Transport Mode Detection for Elderly Care. In Proceedings of the IEEE 18th International Conference on E-Health Networking, Applications and Services (Healthcom), Munich, Germany, 14–16 September 2016; pp. 261–266. [Google Scholar]
- Vallabh, P.; Malekian, R.; Ye, N.; Bogatinoska, D.C. Fall Detection Using Machine Learning Algorithms. In Proceedings of the 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2016; pp. 51–59. [Google Scholar]
- Filios, G.; Nikoletseas, S.; Pavlopoulou, C.; Rapti, M.; Ziegler, S. Hierarchical Algorithm for Daily Activity Recognition via Smartphone Sensors. In Proceedings of the 2015 IEEE 2nd World Forum on Internet of Things (WF-IOT), Milan, Italy, 14–16 December 2015; pp. 381–386. [Google Scholar]
- Tang, C.X.; Phoha, V.V. An Empirical Evaluation of Activities and Classifiers for User Identification on Smartphones. In Proceedings of the 2016 IEEE 8th International Conference on Biometrics Theory, Applications and Systems (BTAS), Niagara Falls, NY, USA, 6–9 September 2016; pp. 1–8. [Google Scholar]
- Li, P.; Wang, Y.; Tian, Y.; Zhou, T.S.; Li, J.S. An Automatic User-Adapted Physical Activity Classification Method Using Smartphones. IEEE Trans. Biomed. Eng. 2017, 64, 706–714. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.J.; Kang, B.N.; Kim, D. Hidden Markov Model Ensemble for Activity Recognition using Tri-axis Accelerometer. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics (Smc 2015): Big Data Analytics for Human-Centric Systems, Kowloon, China, 9–12 October 2015; pp. 3036–3041. [Google Scholar]
- Brdiczka, O.; Bellotti, V. Identifying routine and telltale activity patterns in knowledge work. In Proceedings of the Fifth IEEE International Conference on Semantic Computing (ICSC), Palo Alto, CA, USA, 18–21 September 2011. [Google Scholar]
- Costa, Â.; Castillo, J.C.; Novais, P.; Fernández-Caballero, A.; Simoes, R. Sensor-driven agenda for intelligent home care of the elderly. Exp. Syst. Appl. 2012, 39, 12192–12204. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Categories: | Sensors: | Availability |
|---|---|---|
| Motion sensors | Accelerometer Gyroscope | Always present Present in most models |
| Magnetic/mechanical sensors | Magnetometer | Present in most models |
| Location sensors | GPS | Always present |
| Acoustic sensors | Microphone | Always present |
| Force sensors | Touch screen | Always present |
| Imaging/video sensors | Camera | Always present |
| Methods: | Advantages: |
|---|---|
| ACQUA framework [17] | Controls of the order of the data acquisition; Controls the correct segments of the data requested; Controls the calibration of the data acquisition rates; Controls the packet sizes and radio characteristics; Controls the adaptation of the dynamic changes in query selective properties; Controls the support of multiple queries and heterogeneous time window semantics; Adapted for low processing, memory, and energy capabilities. |
| Orchestrator framework [25] | Distributed execution of the data acquisition using several mobile devices; Adapted for low processing, memory, and energy capabilities. |
| ErdOS framework [26] | Distributed execution of the data acquisition using several mobile devices; Adapted for low processing, memory, and energy capabilities. |
| LittleRock prototype [27] | Adapted for low processing, memory, and energy capabilities. |
| Jigsaw continuous sensing engine [28] | Controls the different sample rates; Adapted for low processing, memory, and energy capabilities. |
| SociableSense framework [29] | Cloud-based framework; Needs a constant Internet connection; Adapted for low processing, memory, and energy capabilities. |
| CHG technique [30] | Stores the sensory data in the smartphone memory; Adapted for low processing, and energy capabilities. |
| BBQ framework [31] | Uses a multi-dimensional Gaussian probability density function from all sensors; Adapted for low processing, memory, and energy capabilities. |
| Cursor movement algorithm [36] | Stores the sensory data in the smartphone memory; Adapted for low processing, and energy capabilities. |
| No framework | Adapted for low processing, memory, and energy capabilities. |
| Types of Sensors: | Data Cleaning Techniques: |
|---|---|
| Motion sensors; Magnetic/mechanical sensors. | Low-Pass Filter; High-Pass Filter; KALMAN Filter; Weighted moving average (WMA) algorithm; Moving average filter. |
| Location sensors | The data cleaning technique is not important for this type of data acquired. |
| Acoustic sensors | Moving average filter; Discrete Fourier Transform (DFT); Inverse Discrete Fourier Transform (IDFT); Fast Fourier Transform (FFT). |
| Force sensors Imaging/video sensors | The data cleaning technique is not important for this type of data acquired. |
| Types of Sensors: | Features: |
|---|---|
| Motion sensors; Magnetic/mechanical sensors. | Mean [67,70,71,72,73,74,75], average of peak frequency (APF) [66], maximum [66,70,71,73], minimum [66,70,71,73], standard deviation [66,67,70,71,72,73,74,75], Root Mean Square (RMS) [66,70], cross-axis signals correlation [66,67,69,73,76], skewness [67], kurtosis [67], average absolute deviation [67], slope [74], binned distribution [68], and zero crossing rate for each axis [69]; Mean [67,70,71,72,73,74,75], median [70,74], variance [70,71], maximum [66,70,71,73], minimum [66,70,71,73], standard deviation [66,67,70,71,72,73,74,75], Root Mean Square (RMS) [66,70], Fast Fourier Transform (FFT) spectral energy [70,76], frequency domain entropy [76], FFT coefficients [70,73], logarithm of FFT [76], Interquartile range [71,73], skewness [67], kurtosis [67], wavelet energy [73], and percentiles of MV [75]; Time between peaks [72], average of peak values [77], average of peak rising time [77], average of peak fall time [77], average time between peaks [77]. |
| Location sensors | Distance between two points. |
| Acoustic sensors | Average [78], Thresholding [78], Minimum [78], Maximum [78], Distance [78], MFCC (Mel-frequency cepstrum coefficients) [79,80]. |
| Force sensors; Imaging/video sensors. | These sensors are not useful for the development of the framework for the Identification of ADL and their environments. |
| Types of sensors: | Data fusion methods: |
|---|---|
| Motion sensors; Magnetic/mechanical sensors; Location sensors; Acoustic sensors. | Autoregressive-Correlated Gaussian Model; Fuzzy Logic; Dempster-Shafer; Evidence Theory; Recursive Operators; Support Vector Machine (SVM); Random Forests; Artificial Neural Networks (ANN); Decision Trees; Naïve Bayes classifier; Bayesian analysis; Kalman Filter; k-Nearest Neighbor (k-NN); Least squares-based estimation methods; Optimal Theory; Long Short Term Memory (LSTM) Recurrent Neural Networks (RNN); Uncertainty Ellipsoids. |
| Force sensors; Imaging/video sensors. | These sensors are not useful for the development of the framework for the Identification of ADL and their environments. |
| Types of Sensors: | Pattern Recognition Methods: | ADL Recognized: |
|---|---|---|
| Motion sensors; Magnetic/mechanical sensors; Location sensors; Acoustic sensors. | Support Vector Machines (SVM); Decision trees (J48, C4.5); Artificial Neural Networks (ANN); Probabilistic Neural Networks (PNN); Deep Neural Networks (DNN); Long Short Term Memory (LSTM) Recurrent Neural Networks (RNN); k-Nearest Neighbour (KNN); Naïve Bayes; Random Forest; Logistic Regression; Bayesian network; Sequential minimal optimization (SMO); Logistic Model Trees (LMT); Simple Logistic Logit Boost. | Walking; running; jogging; jumping; dancing; driving, cycling; sitting; standing; lying; walking on stairs; going up on an escalator; laying down; walking on a ramp. |
| Support Vector Machines (SVM); Artificial Neural Networks (ANN); Probabilistic Neural Networks (PNN); Deep Neural Networks (DNN); Long Short Term Memory (LSTM) Recurrent Neural Networks (RNN); Hidden Markov model (HMM); Random Forest. | Cleaning; cooking; medication; sweeping; washing hands; watering plants. | |
| Hidden Markov model (HMM). | Walking; walking on stairs; standing; running; sitting; laying. | |
| Force sensors; Imaging/video sensors. | These sensors are not useful for the development of the framework for the Identification of ADL and their environments. | |
| Accelerometer | Gyroscope | Magnetometer | Microphone | GPS | ||
|---|---|---|---|---|---|---|
| Activities | Going Downstairs | ✓ | ✓ | ✓ | ||
| Going Upstairs | ✓ | ✓ | ✓ | |||
| Running | ✓ | ✓ | ✓ | |||
| Walking | ✓ | ✓ | ✓ | |||
| Standing | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Sleeping | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Driving | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Environments | Bar | ✓ | ||||
| Classroom | ✓ | |||||
| Gym | ✓ | |||||
| Library | ✓ | |||||
| Kitchen | ✓ | |||||
| Street | ✓ | |||||
| Hall | ✓ | |||||
| Watching tv | ✓ | |||||
| Bedroom | ✓ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pires, I.M.; Garcia, N.M.; Pombo, N.; Flórez-Revuelta, F.; Spinsante, S. Approach for the Development of a Framework for the Identification of Activities of Daily Living Using Sensors in Mobile Devices. Sensors 2018, 18, 640. https://doi.org/10.3390/s18020640
Pires IM, Garcia NM, Pombo N, Flórez-Revuelta F, Spinsante S. Approach for the Development of a Framework for the Identification of Activities of Daily Living Using Sensors in Mobile Devices. Sensors. 2018; 18(2):640. https://doi.org/10.3390/s18020640
Chicago/Turabian StylePires, Ivan Miguel, Nuno M. Garcia, Nuno Pombo, Francisco Flórez-Revuelta, and Susanna Spinsante. 2018. "Approach for the Development of a Framework for the Identification of Activities of Daily Living Using Sensors in Mobile Devices" Sensors 18, no. 2: 640. https://doi.org/10.3390/s18020640
APA StylePires, I. M., Garcia, N. M., Pombo, N., Flórez-Revuelta, F., & Spinsante, S. (2018). Approach for the Development of a Framework for the Identification of Activities of Daily Living Using Sensors in Mobile Devices. Sensors, 18(2), 640. https://doi.org/10.3390/s18020640