A Foot-Mounted Inertial Measurement Unit (IMU) Positioning Algorithm Based on Magnetic Constraint


Abstract
:1. Introduction
- Transform the magnetometer measurement from a function of time to a function of displacement, avoiding the requirements for velocity.
- Map the features to the frequency domain by FFT transform, improving the distinguishing degree of features.
- Search the most possible match with RANSAC algorithm, improving the match accuracy.
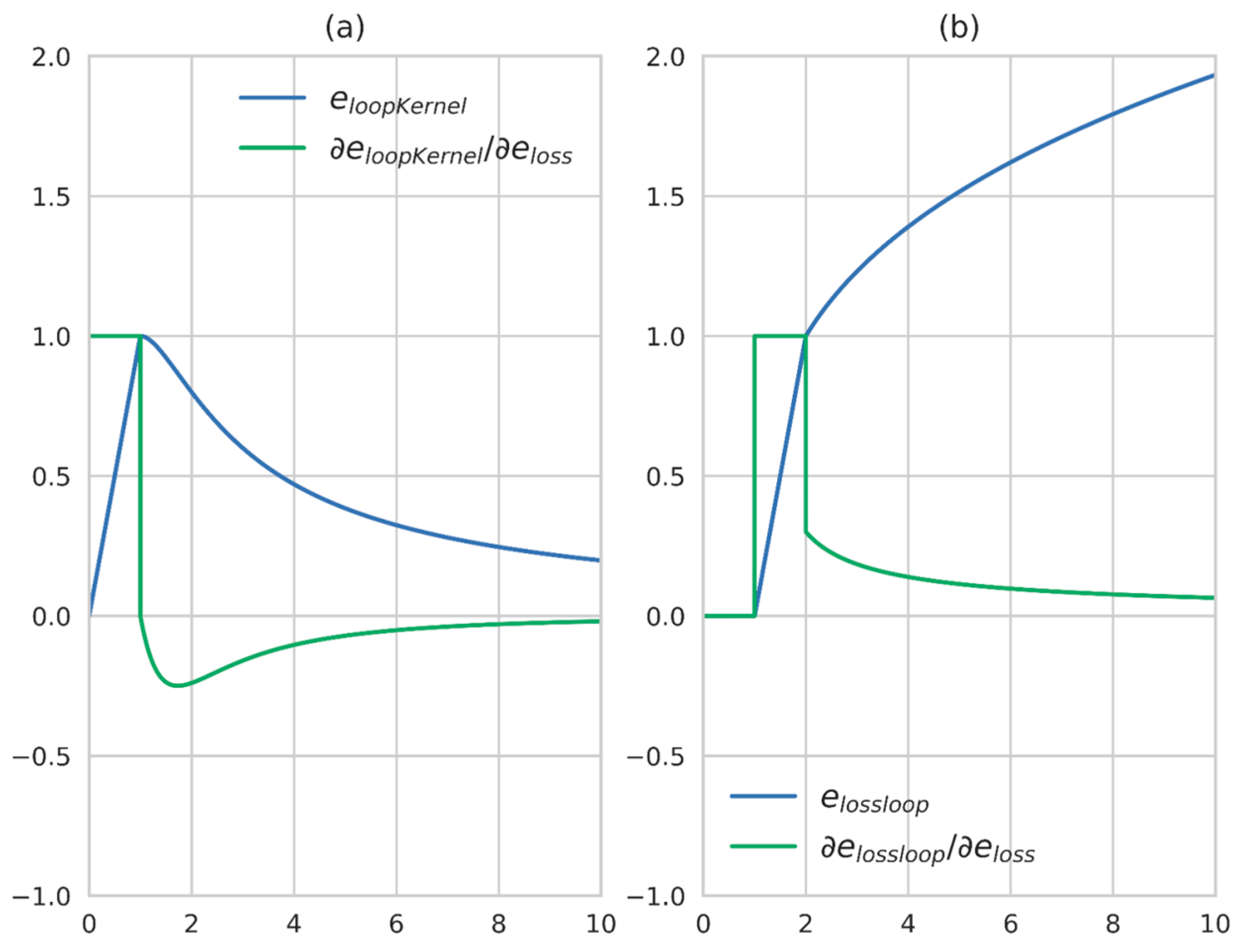
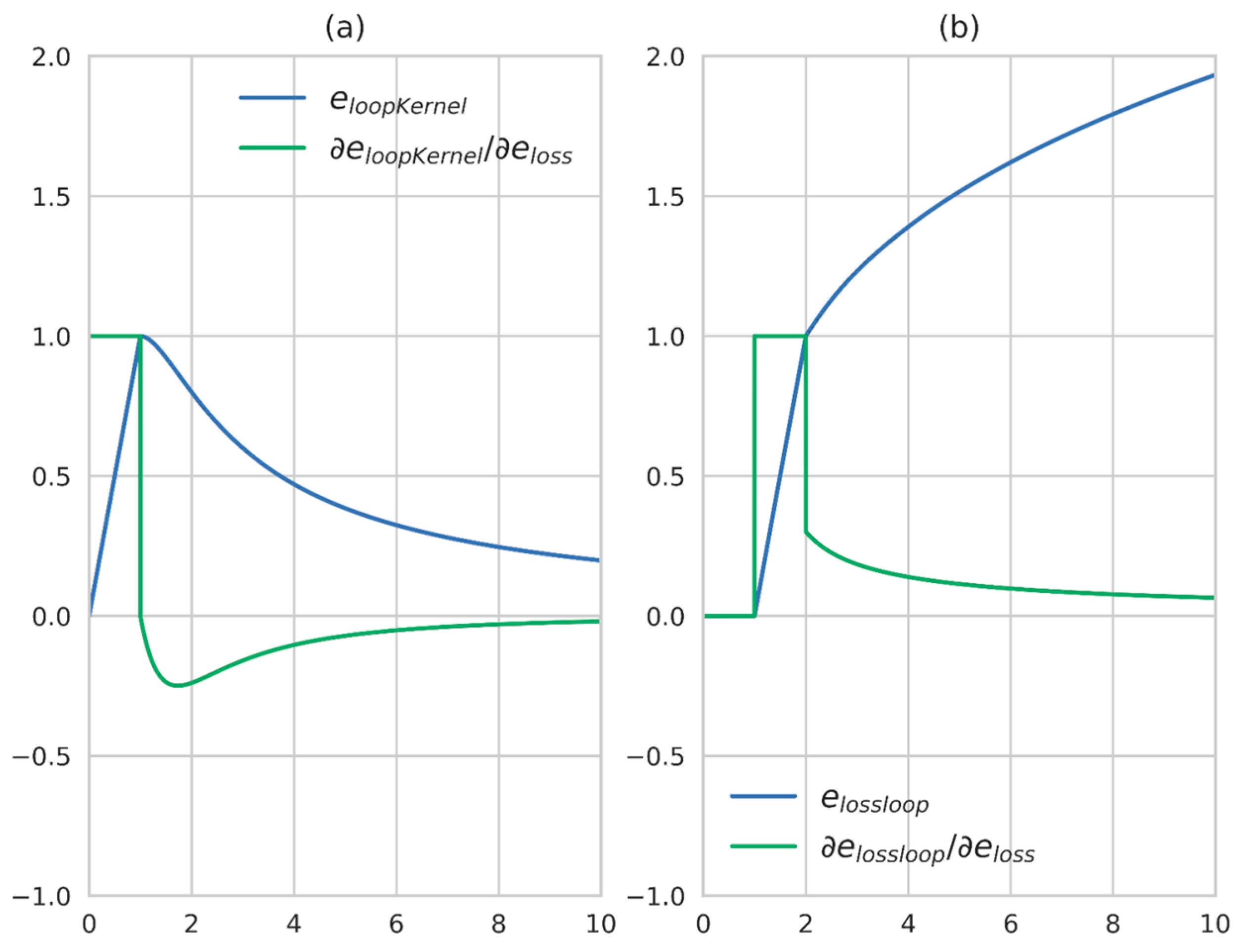
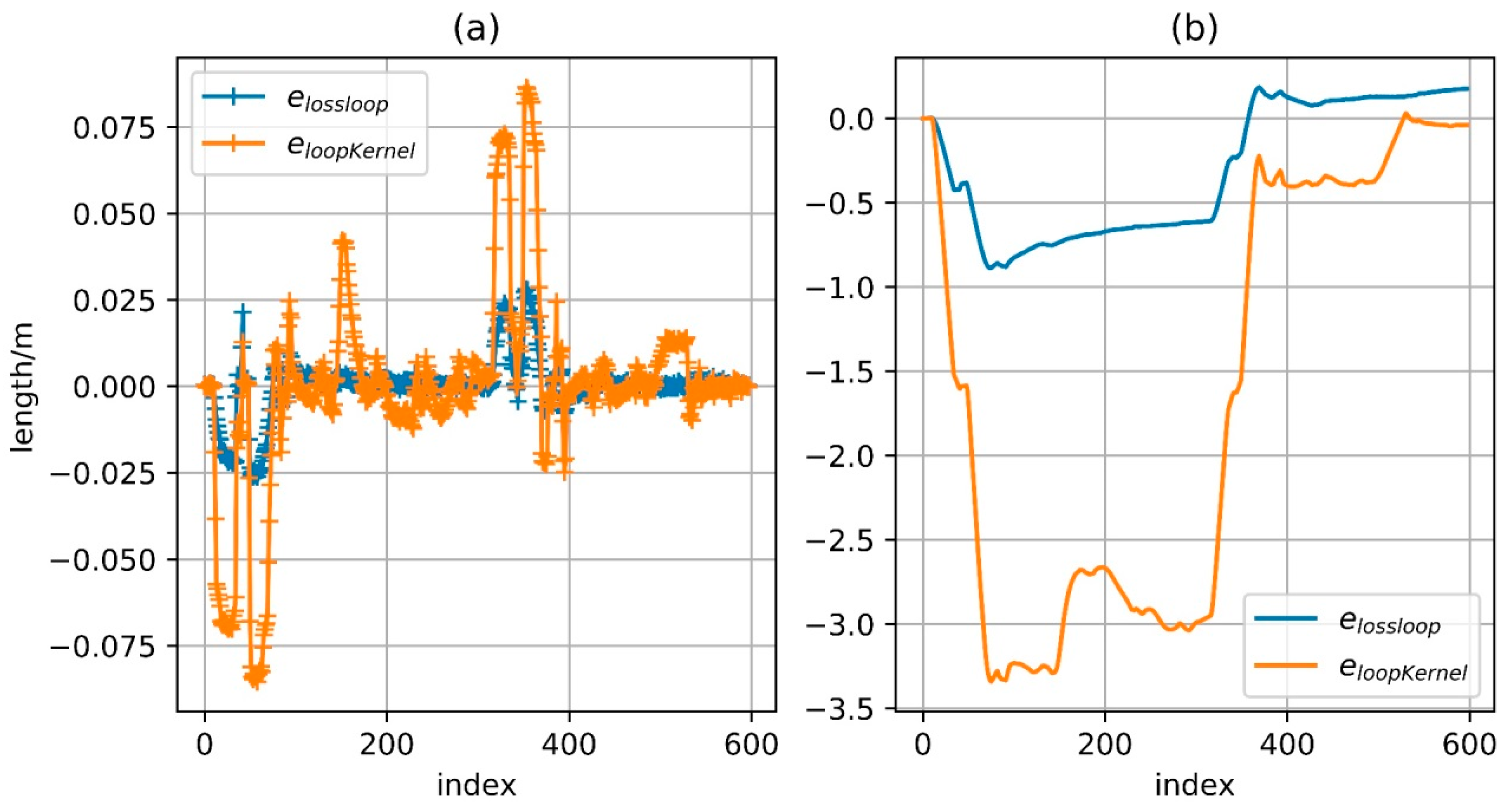
- Propose an improved loop closure error function, improving the tolerance of mismatches.
2. Loop Closure Detection Algorithm of Geomagnetic Information
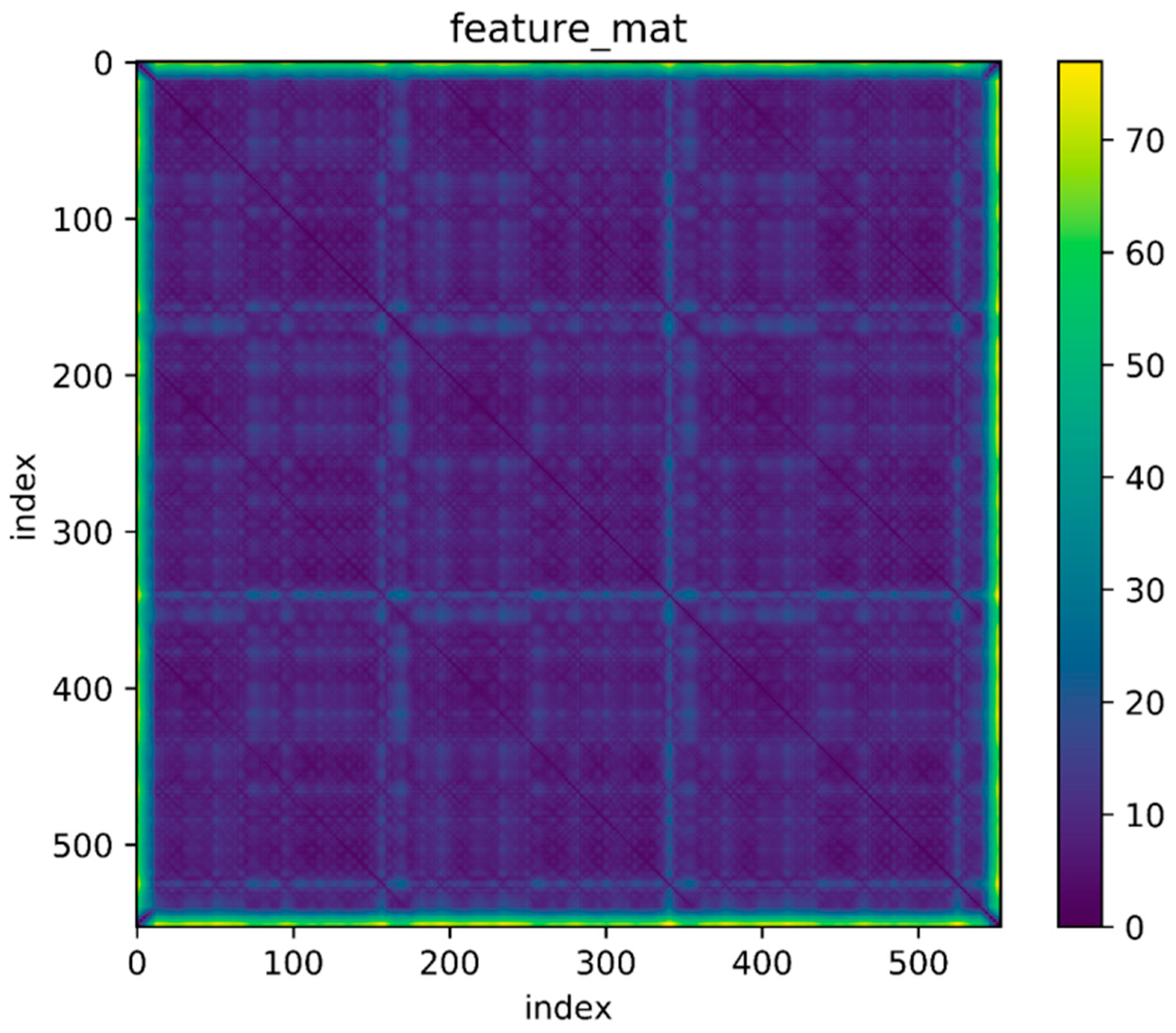
2.1. Feature Collection of Geomagnetic Information
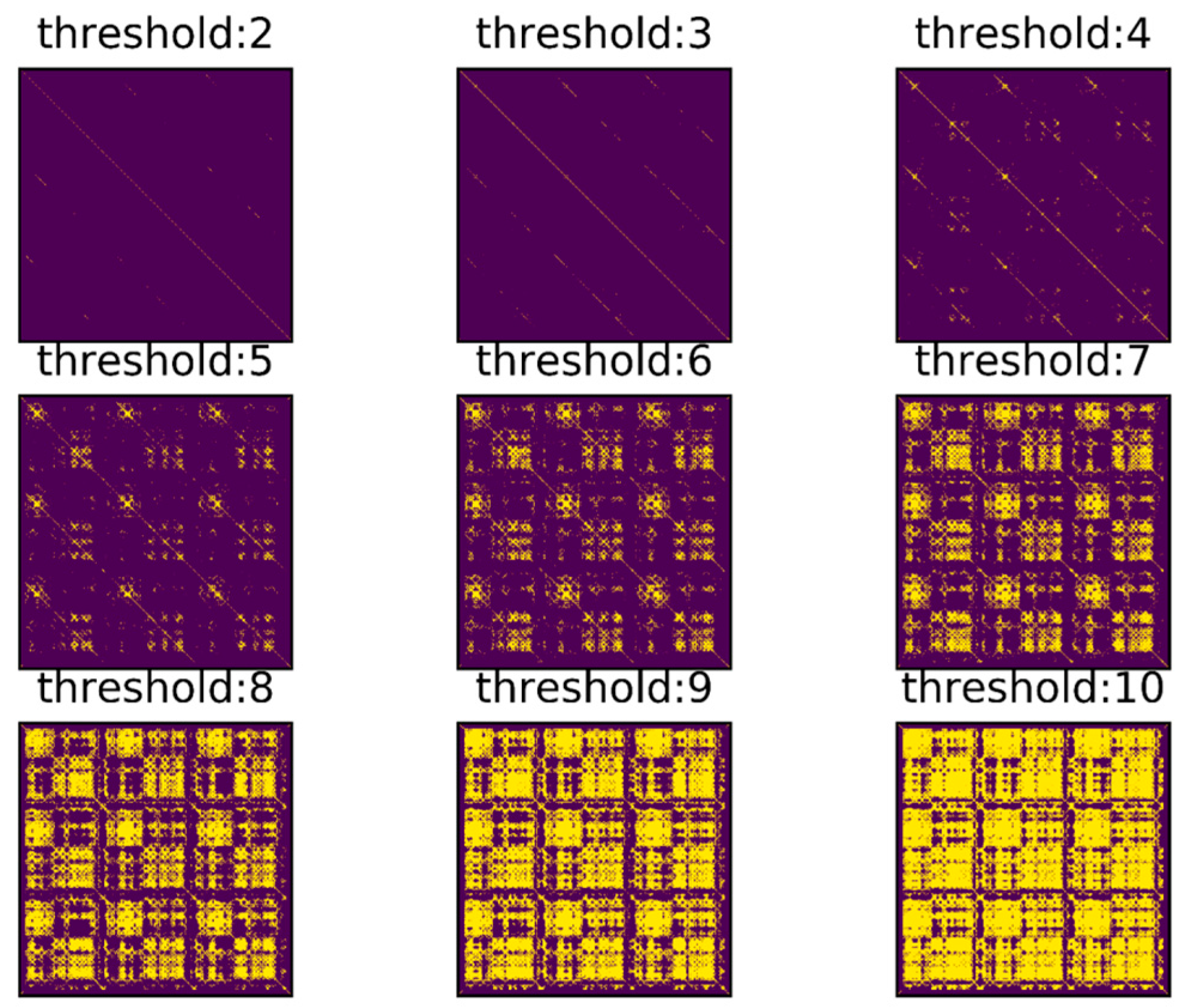
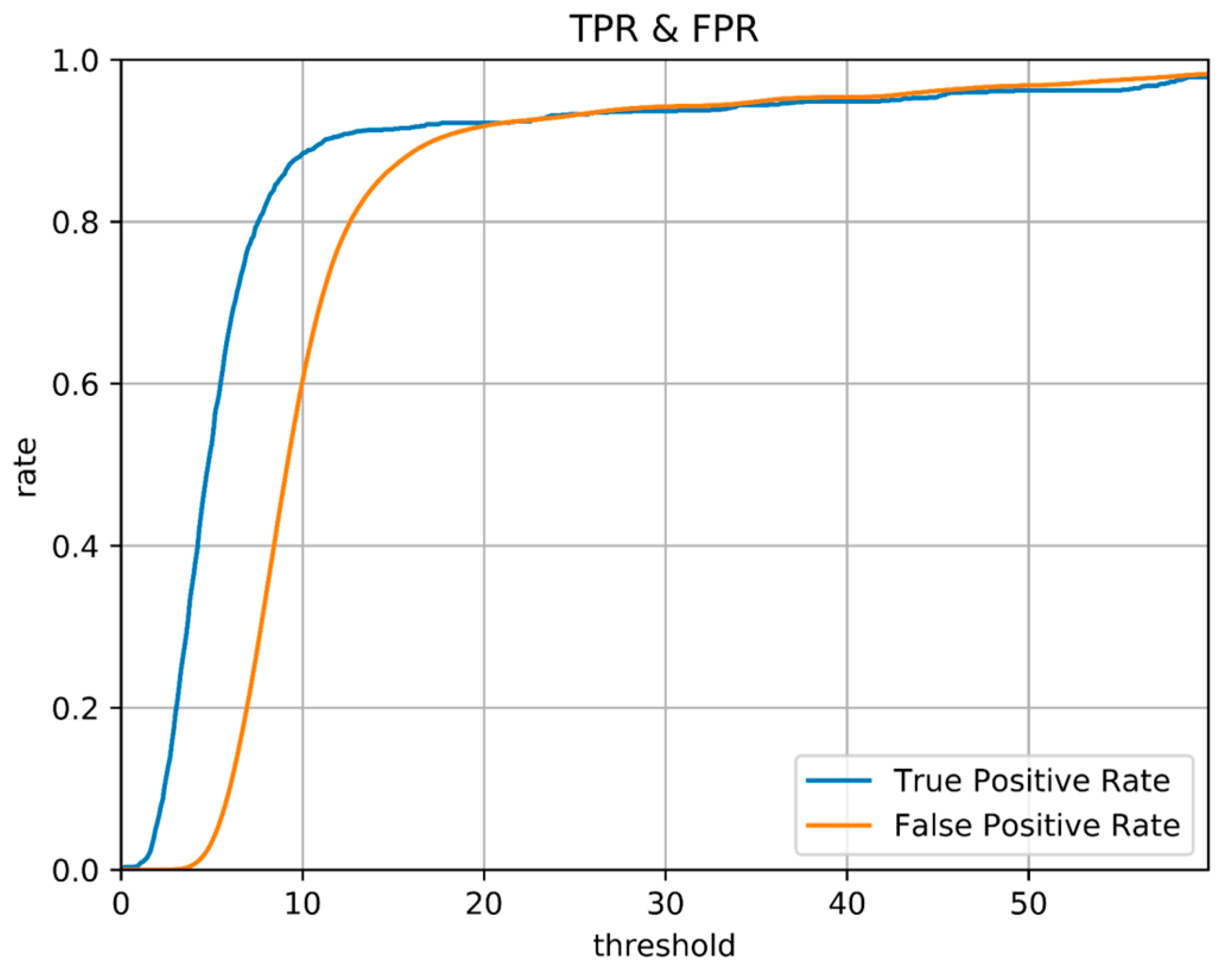
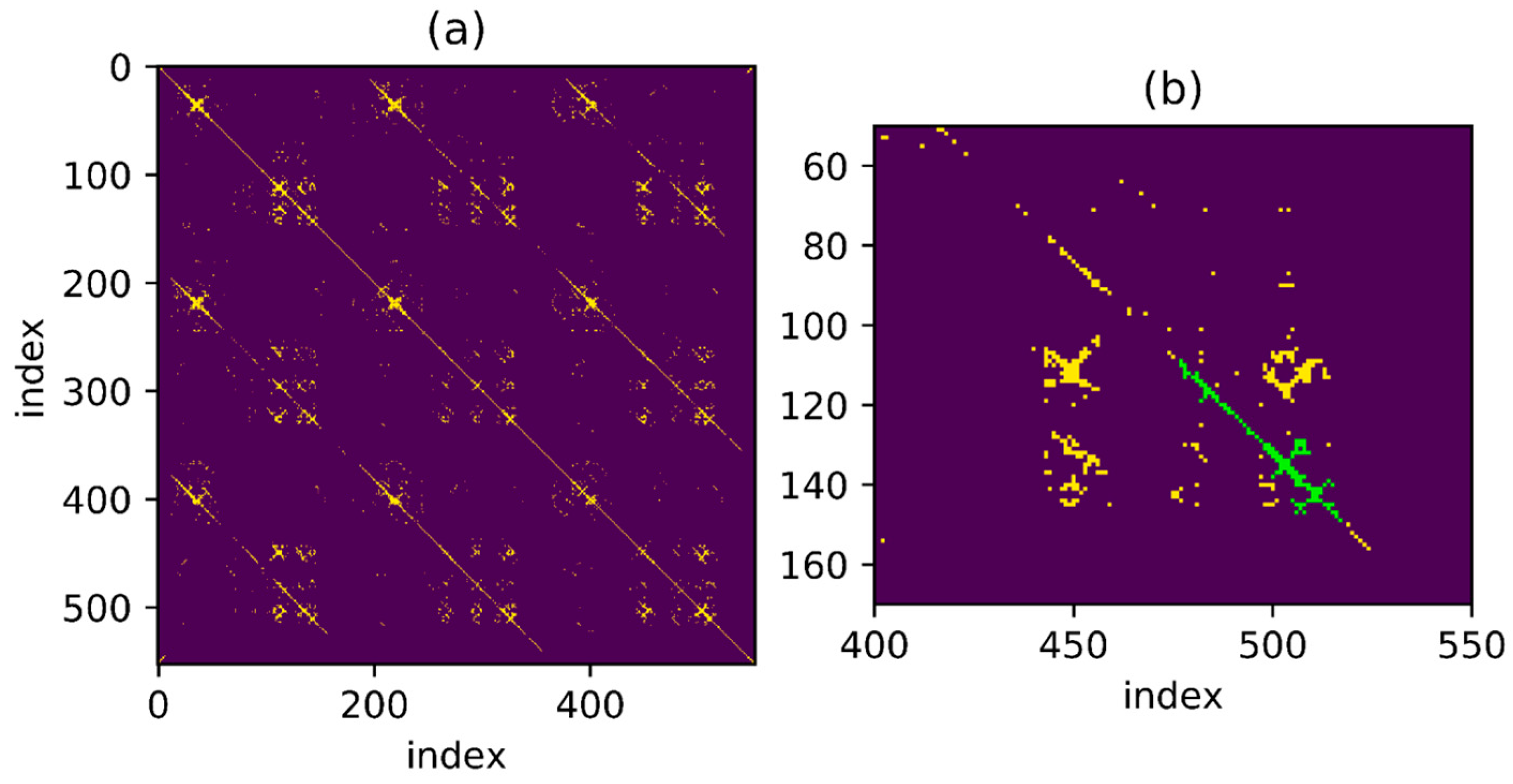
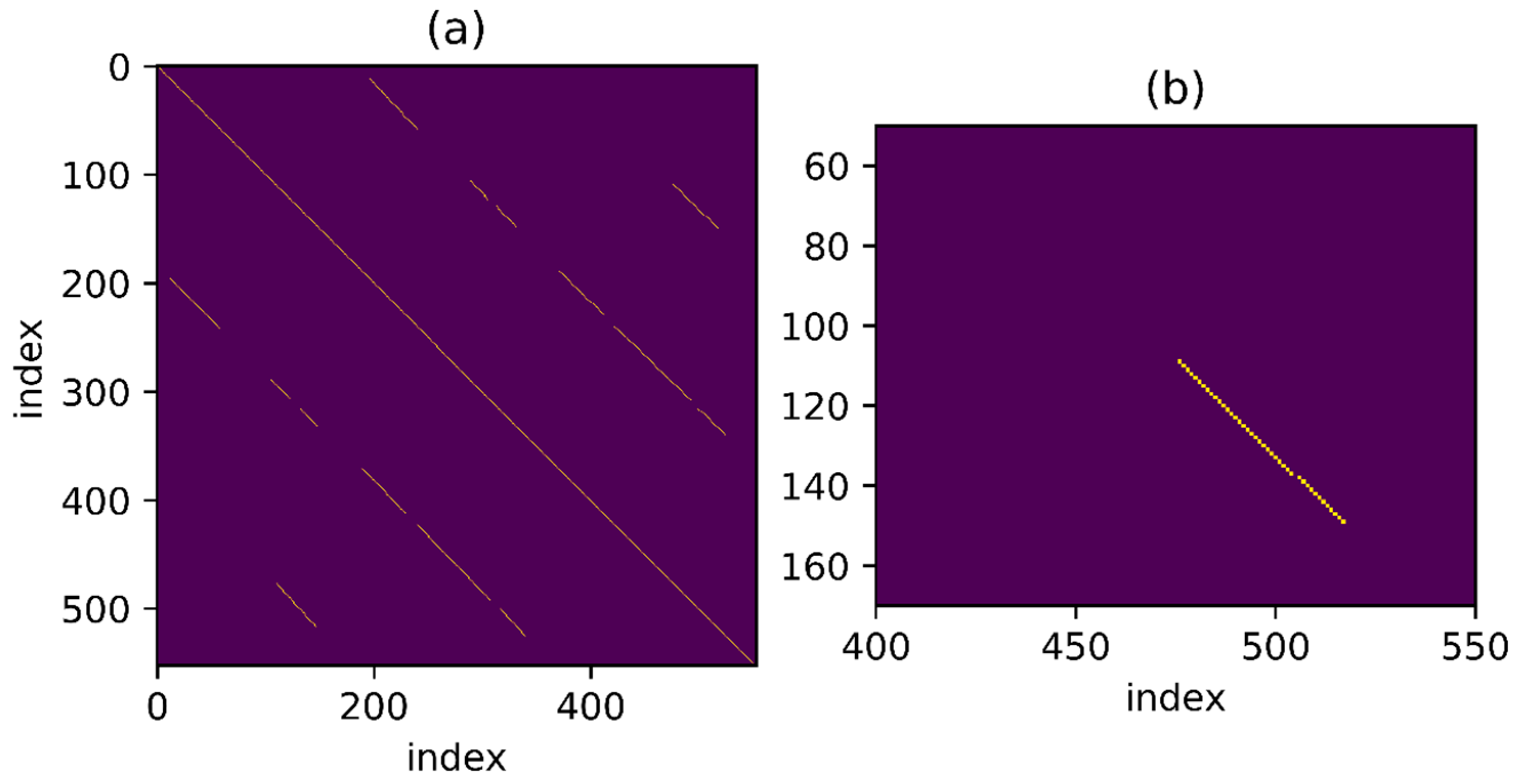
2.2. Geomagnetic Matching Algorithm Based on RANSAC Algorithm
- (a)
- From Equation (12), the model parameter a represents the ratio between the path displacements before and after. The absolute value of a should float up and down at 1.0, as the correspondence before and after are the same physical location and the float range can be defined as a threshold, represented by .
- (b)
- To avoid the mismatched interference as far as possible, some matches which are too short should be given up. Denote he minimum length as.
- (c)
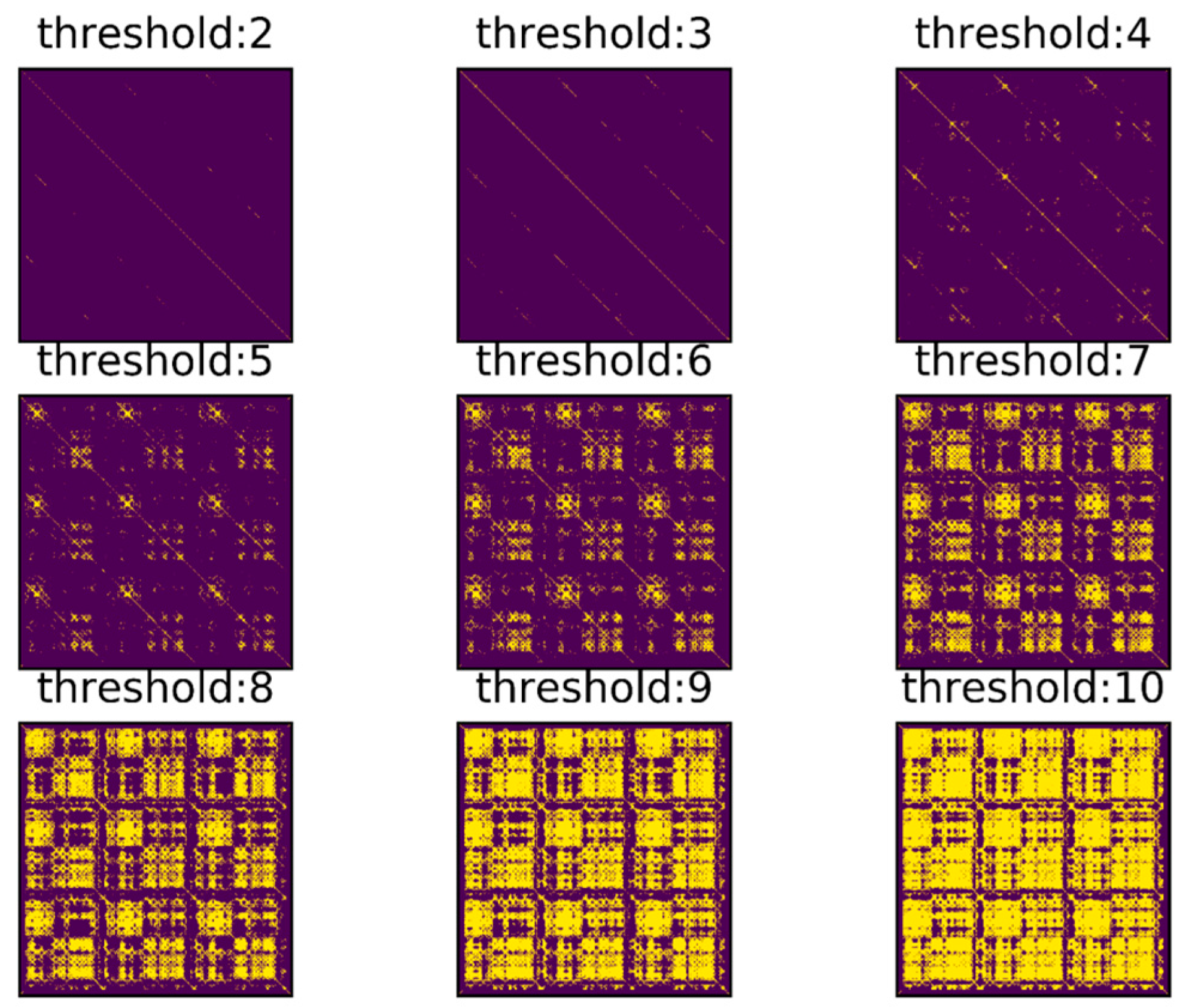
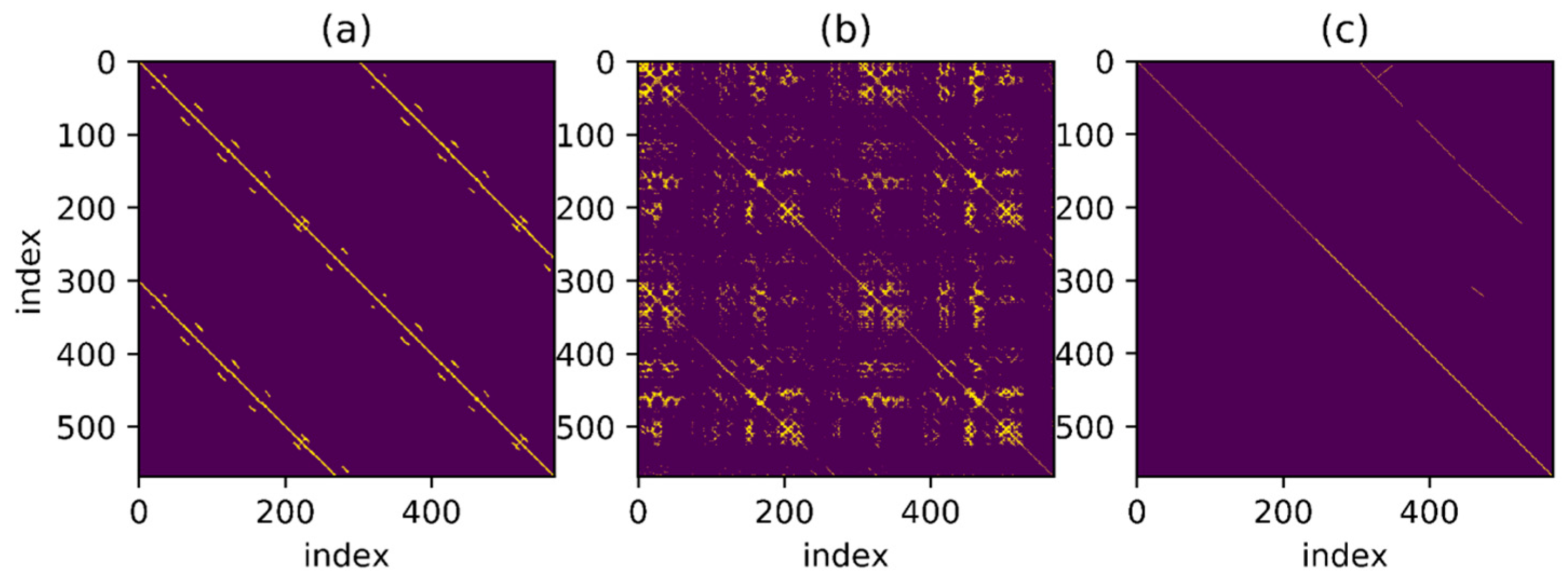
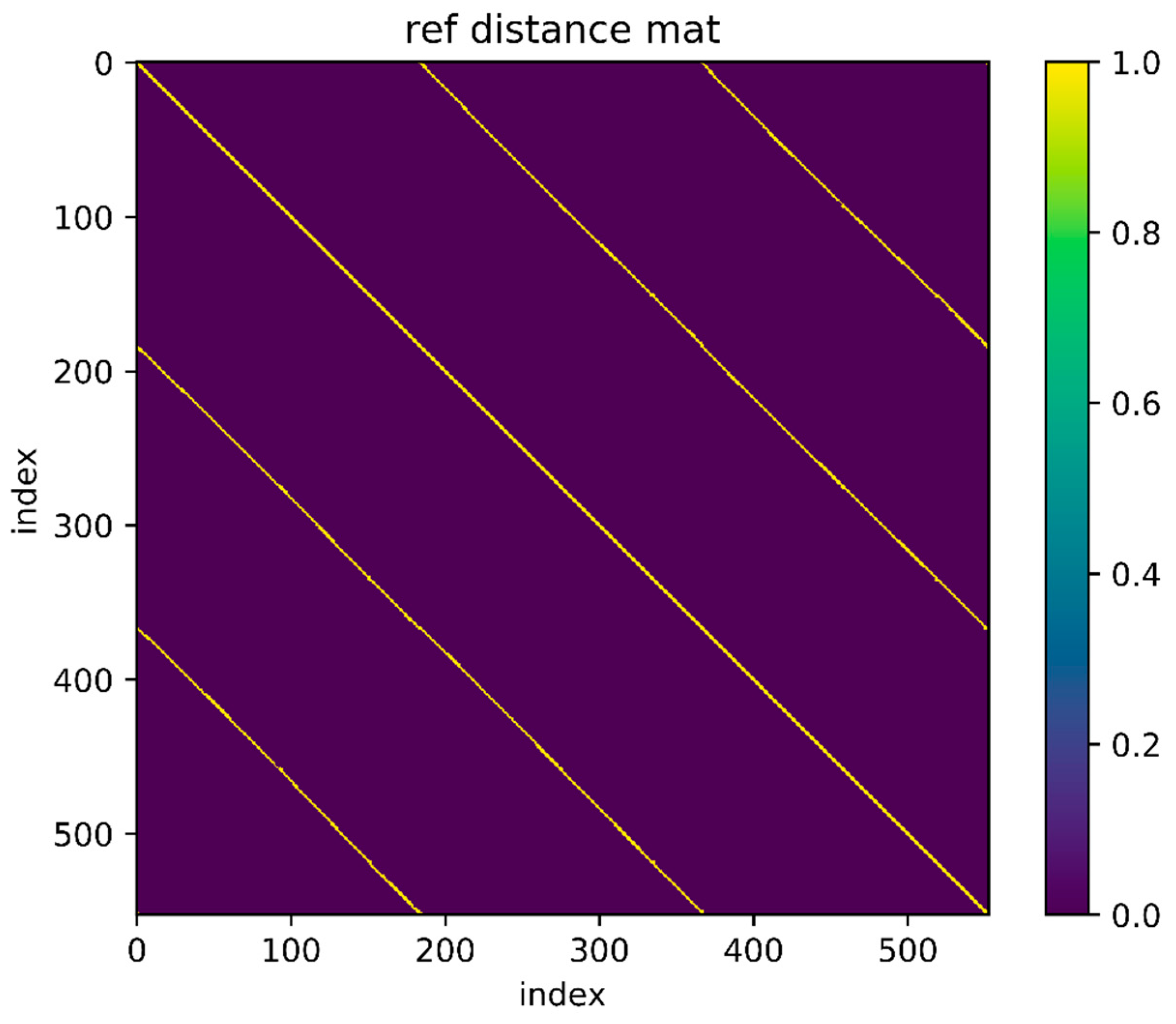
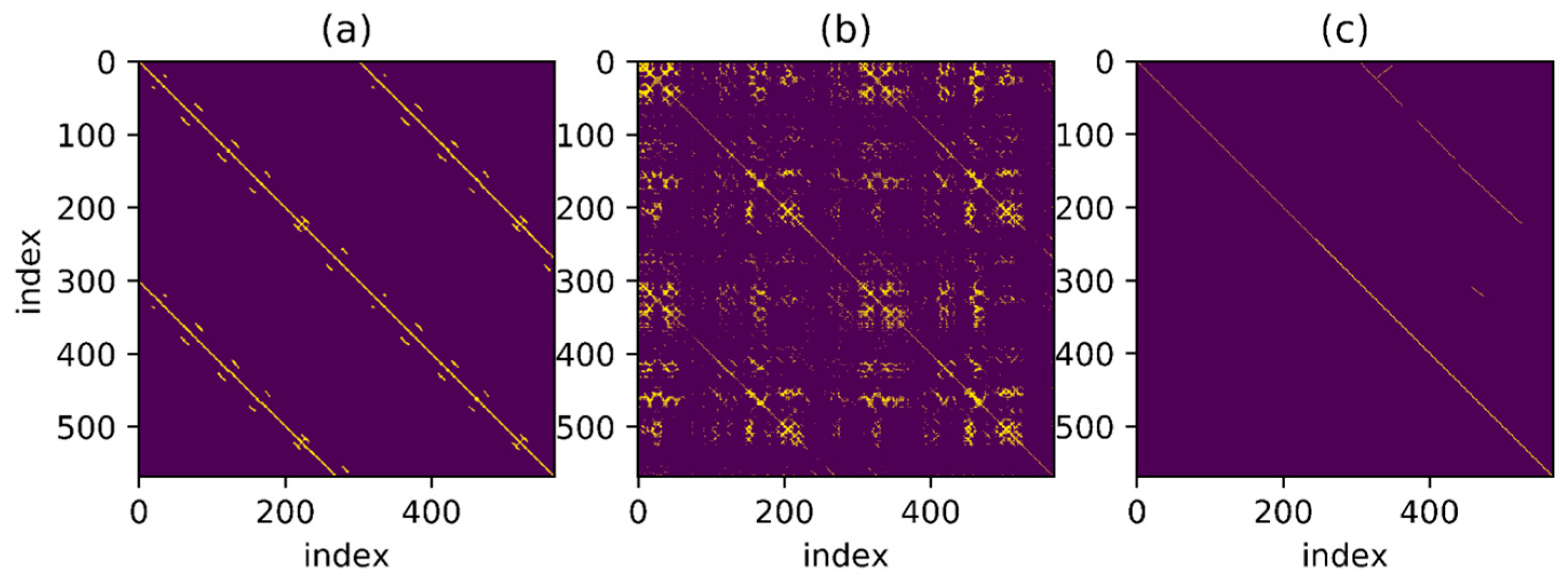
- The proportion of outliers in the total point set should be less than a certain threshold, that is, the matching result with the number of outliers exceeding the threshold should be discarded. This threshold is denoted as . The reason is that if the number of outliers in a match is too large, the feature of this trajectory will not be obvious enough, that is, the variation of magnetic field signal with the position change is not obvious. The reliability of such matching is not high enough, reflected in the feature distance map, that is, there are many mismatches around the correct match.
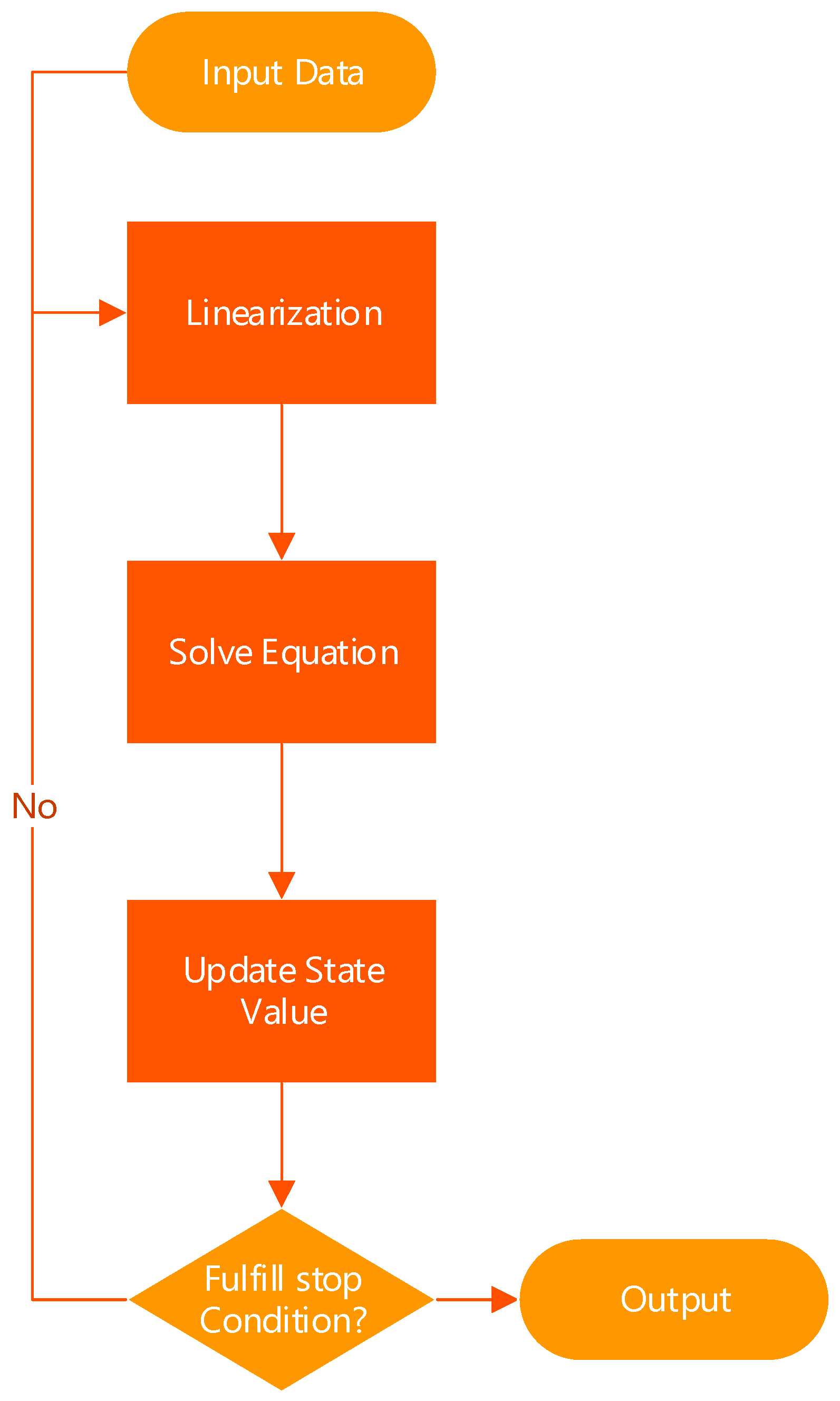
3. Description of State Estimation Algorithm
3.1. Basic Formulation
3.2. IMU Attitude Constraint
3.3. Constraints in the Magnetic and Gravity Direction
3.4. Loop Closure Constraint Based on Geomagnetic Data
4. Experimental Results and Analysis
4.1. Experimental Method
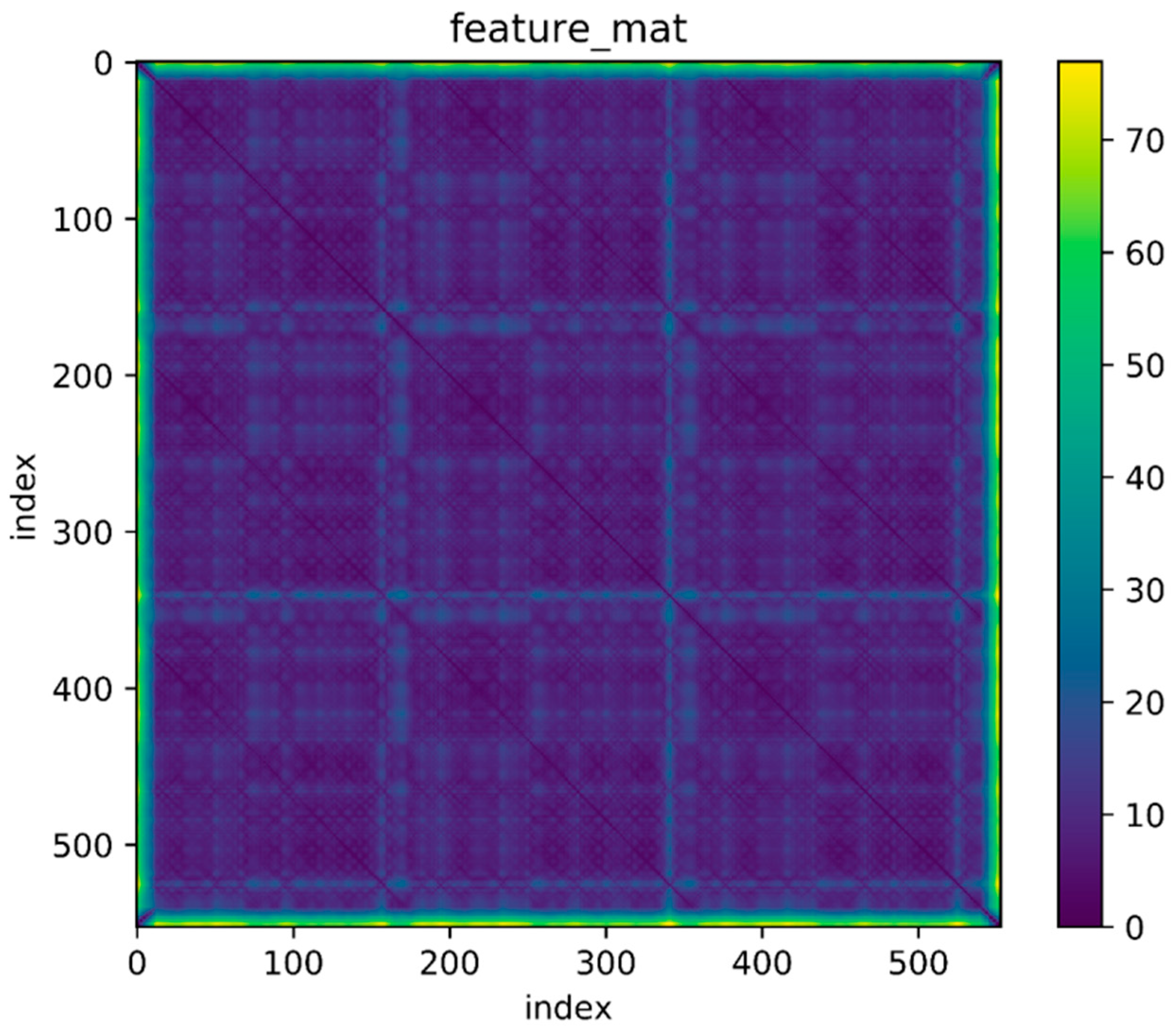
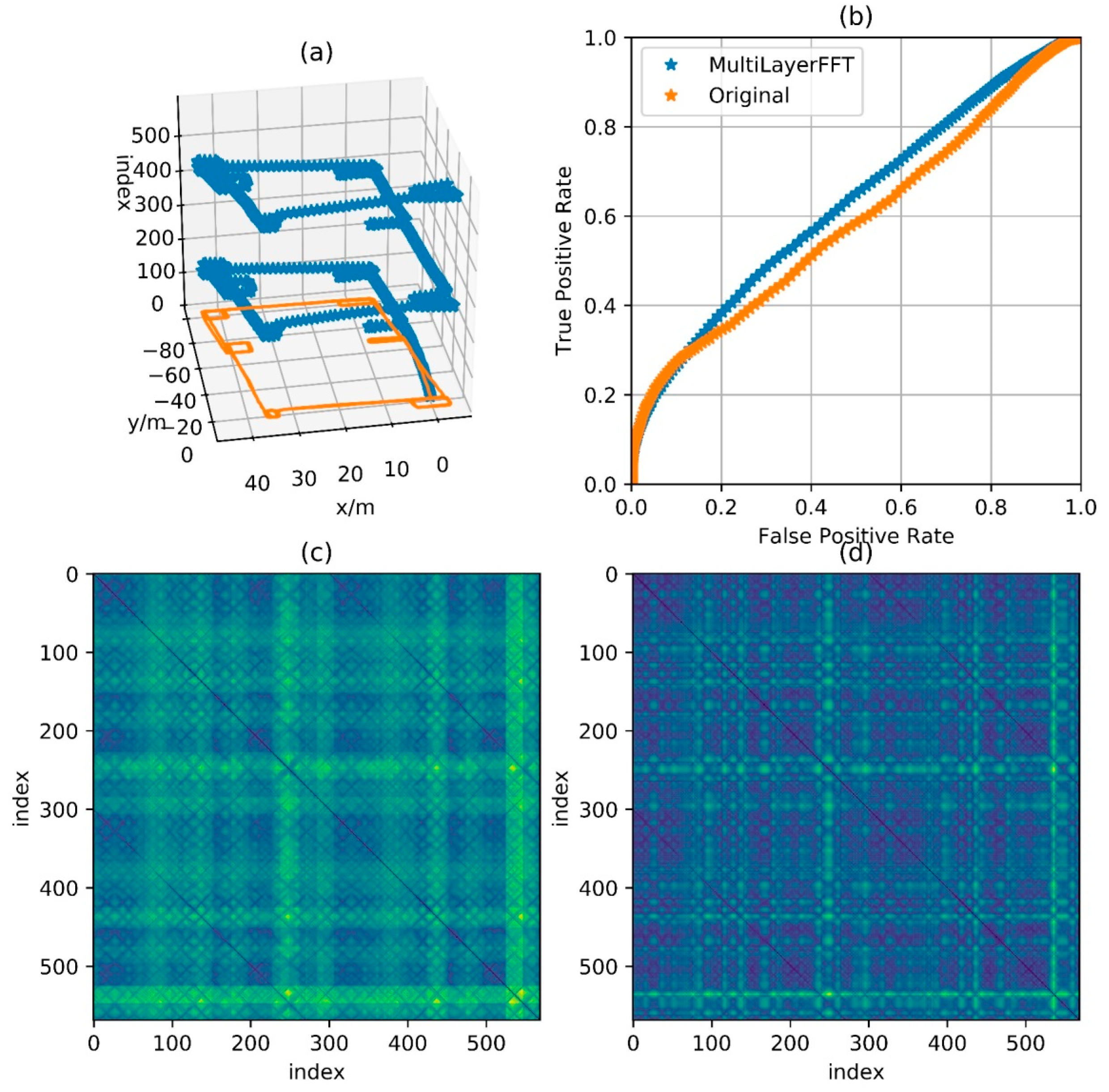
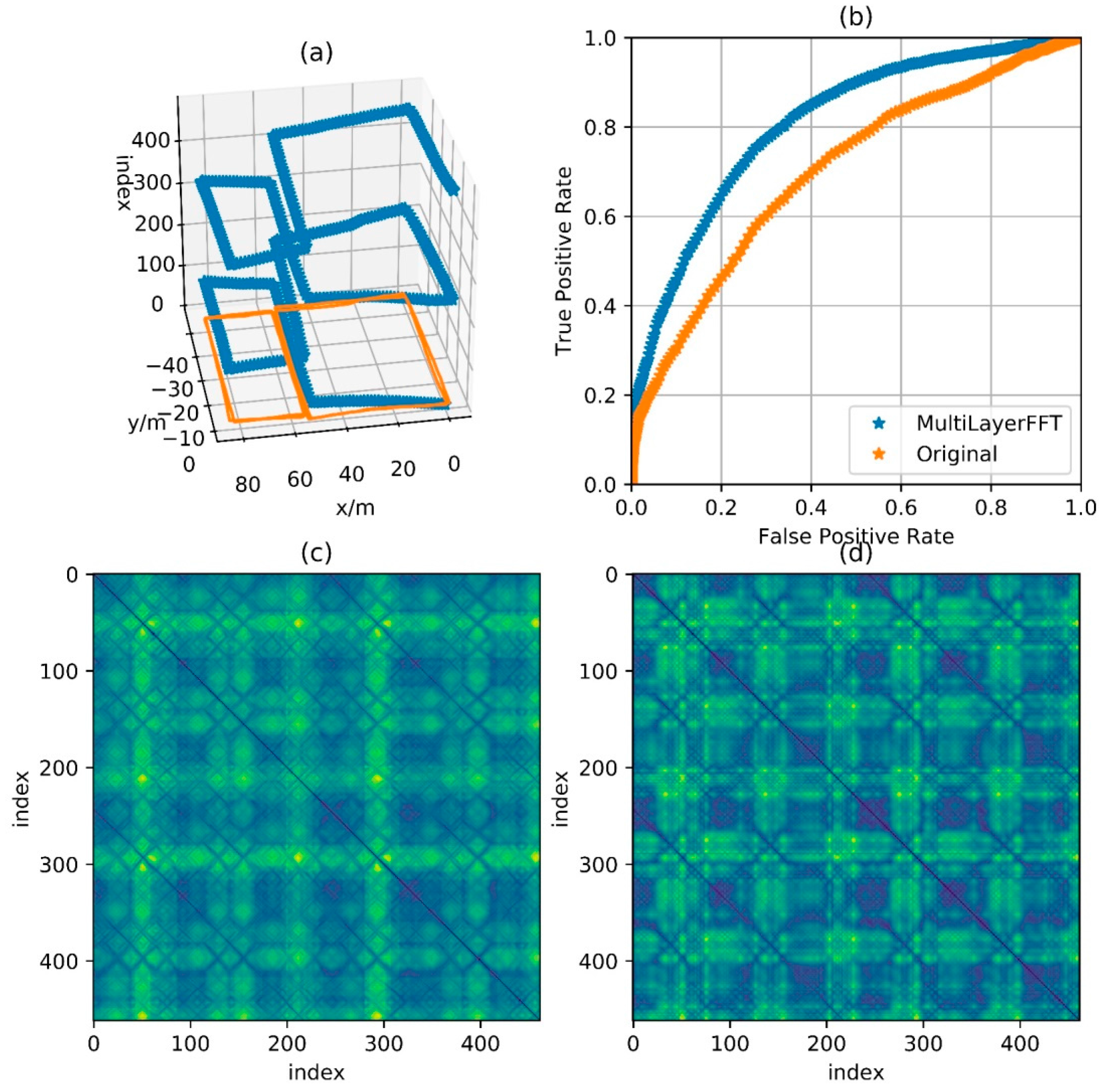
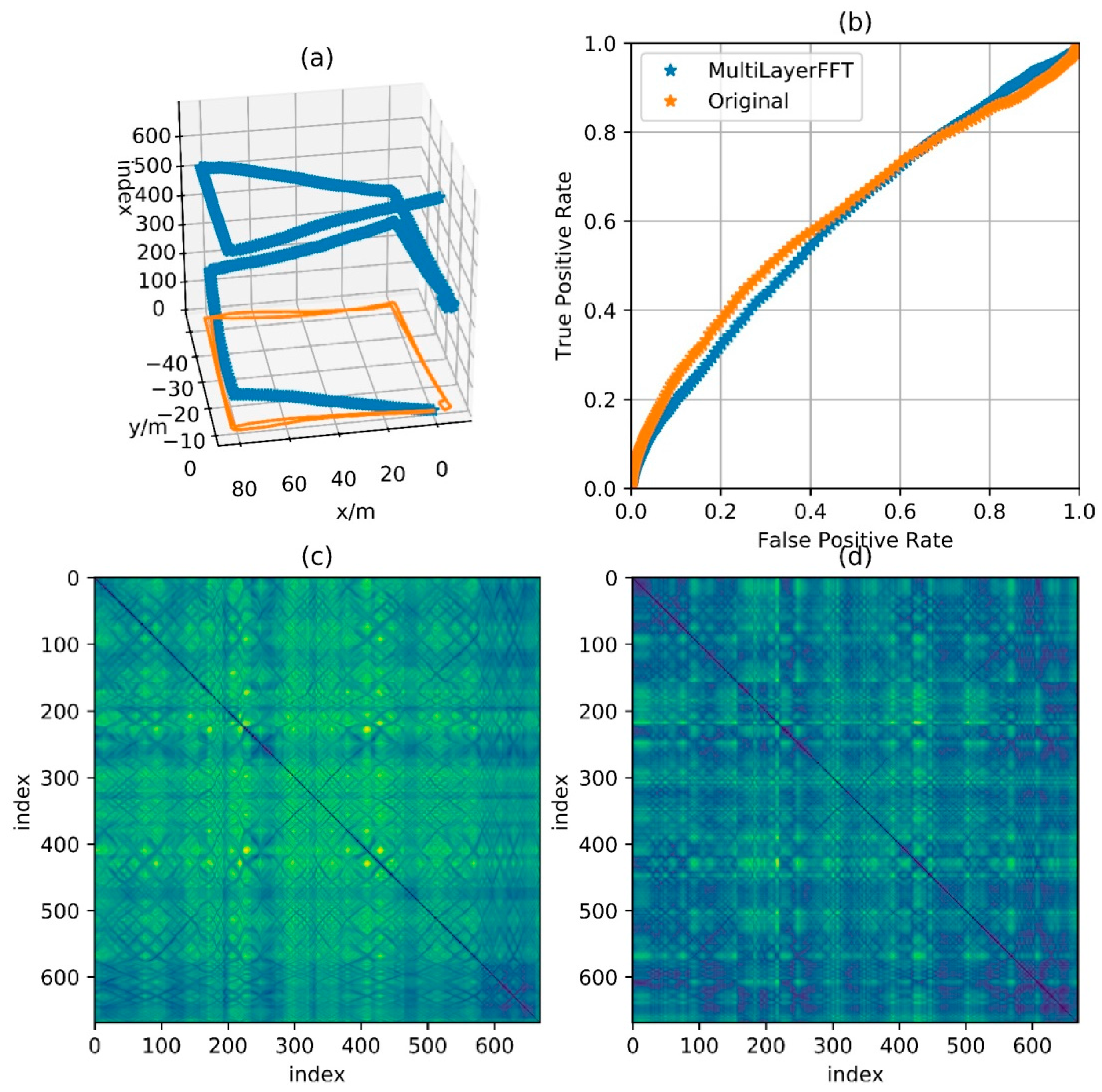
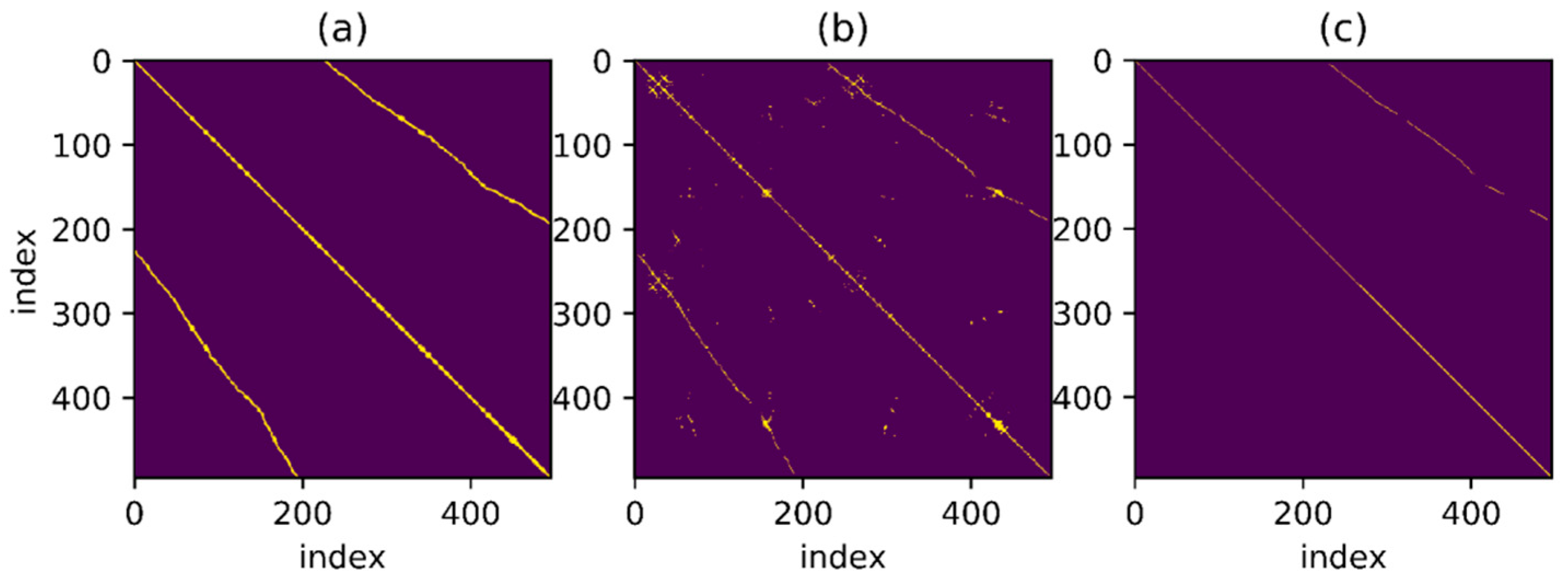
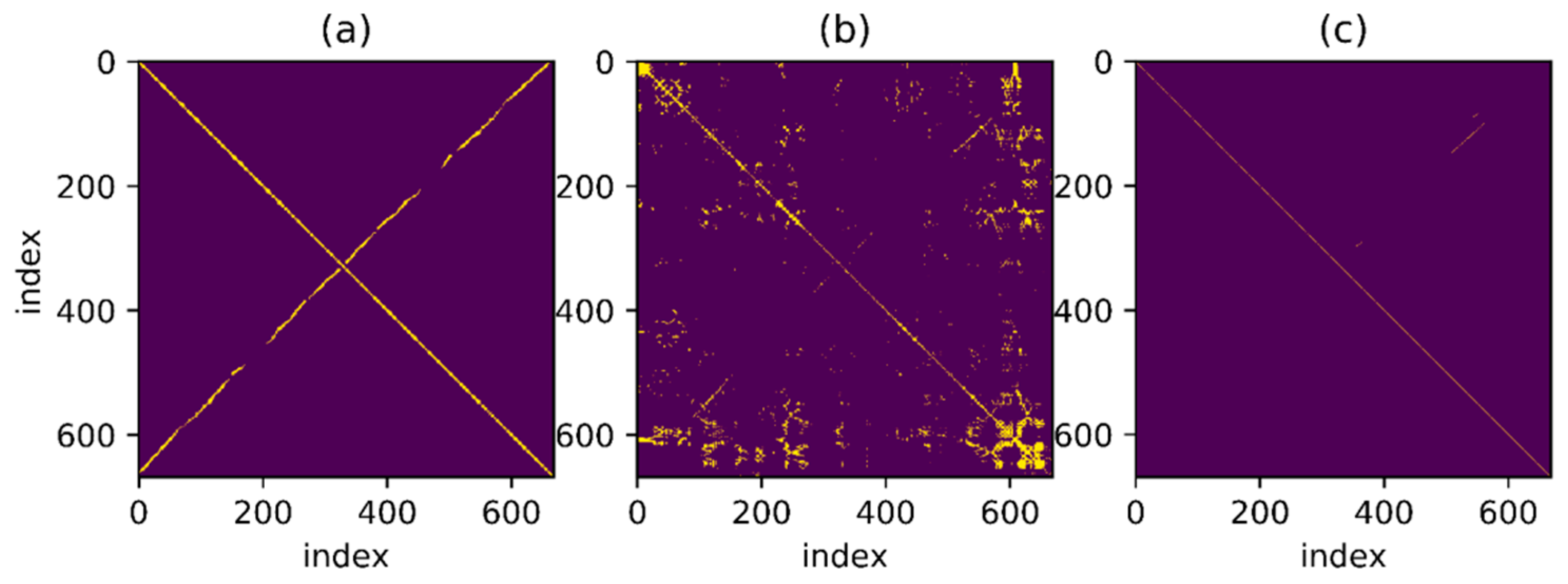
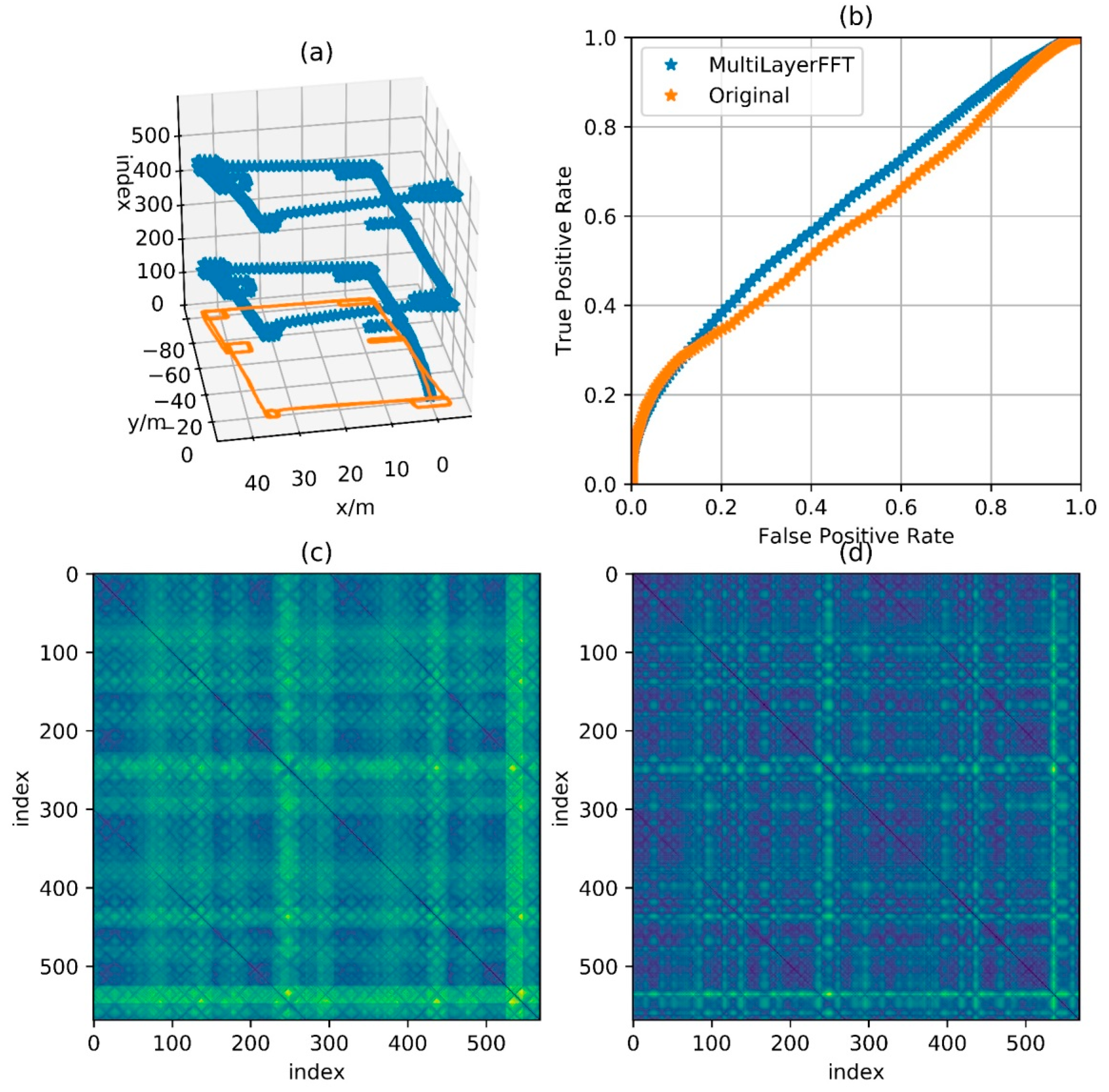
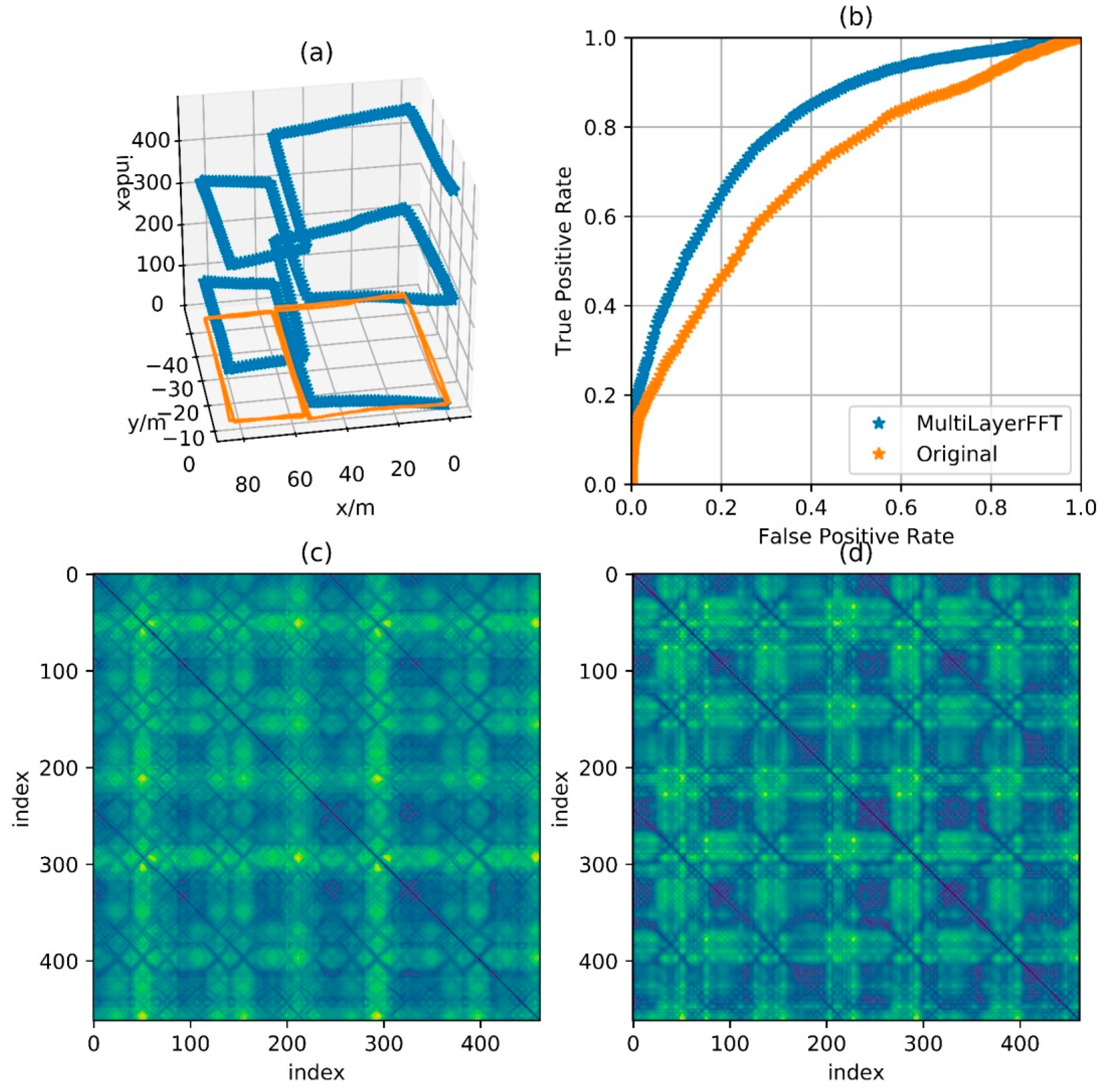
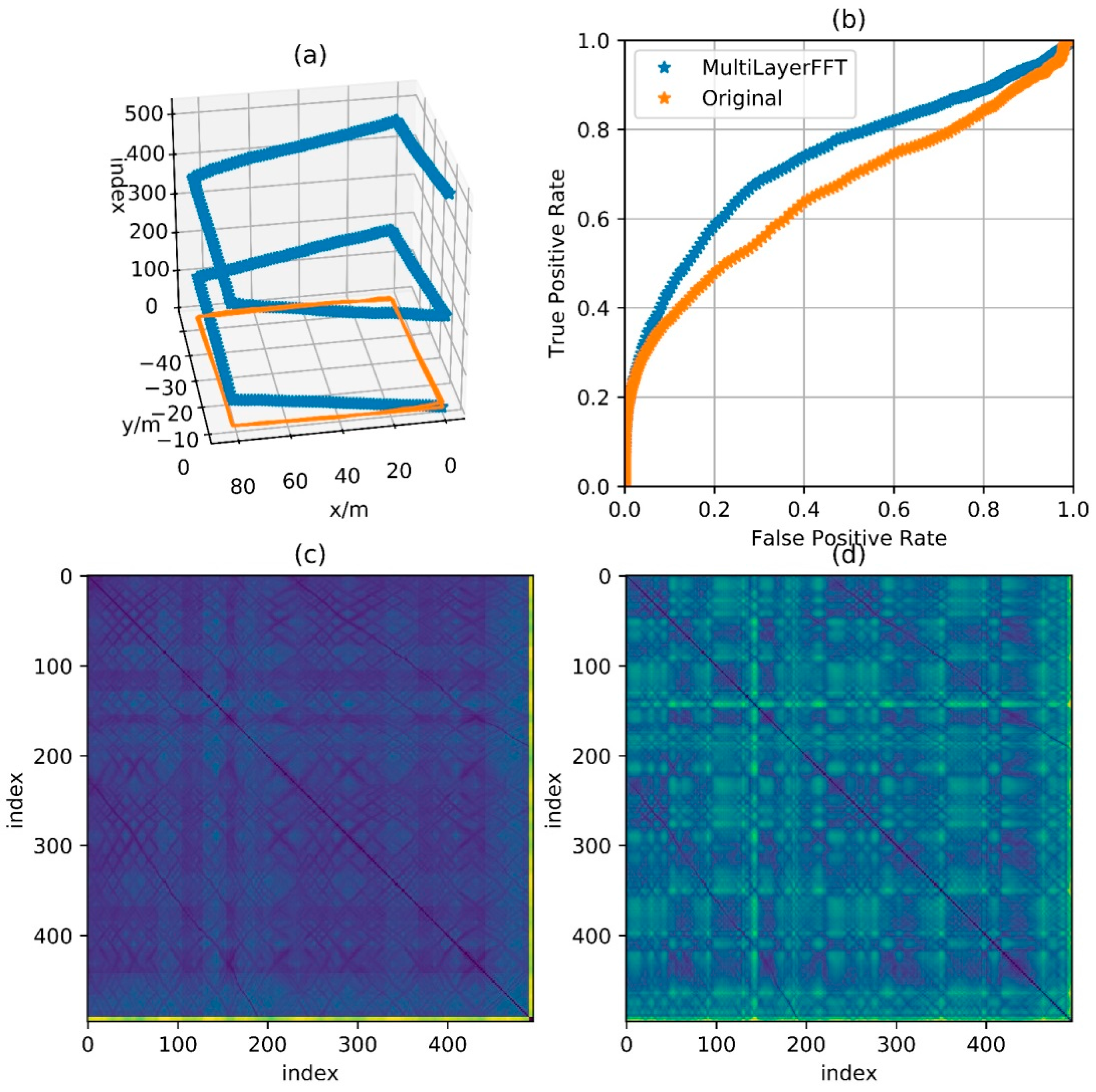
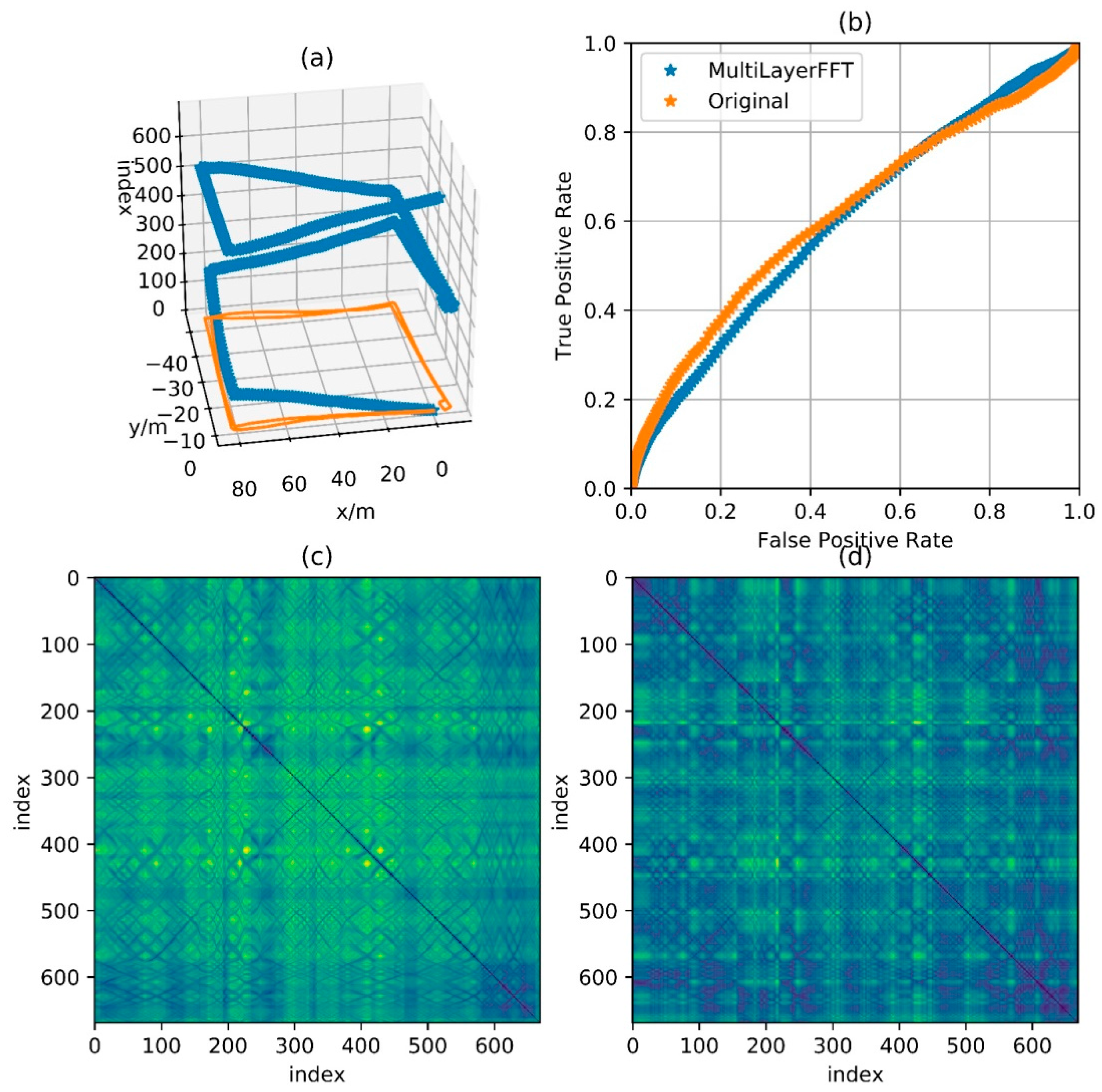
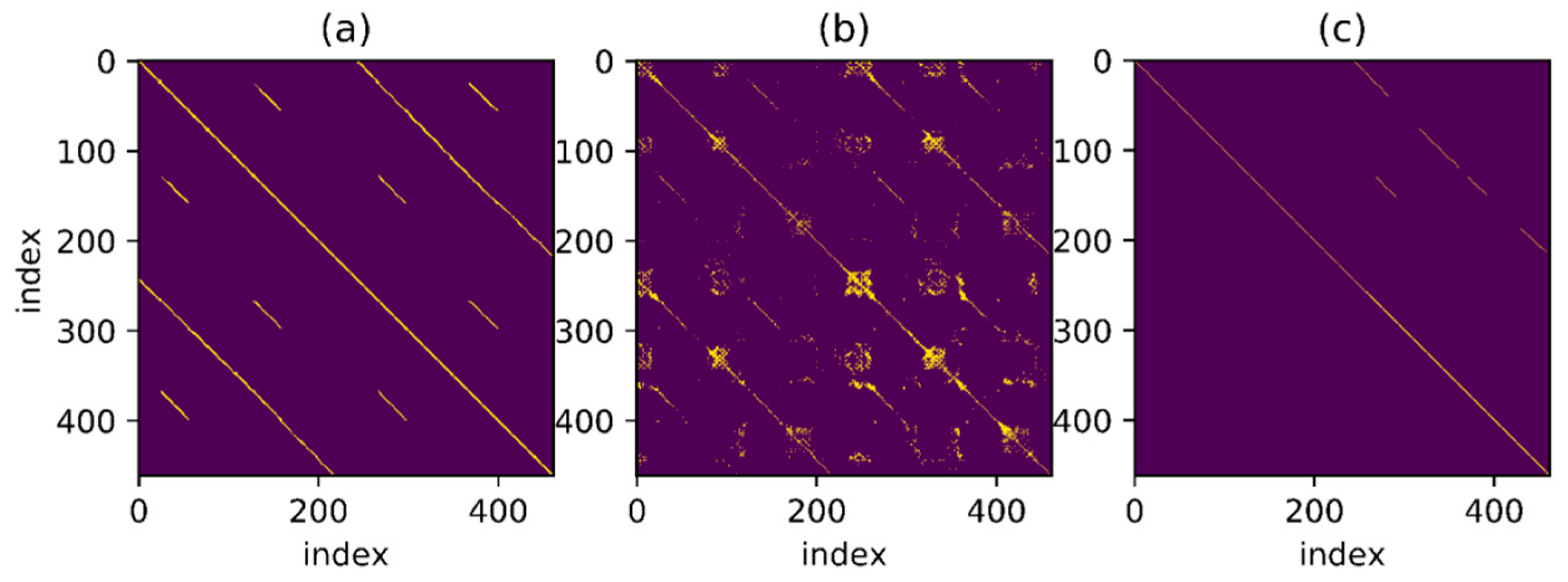
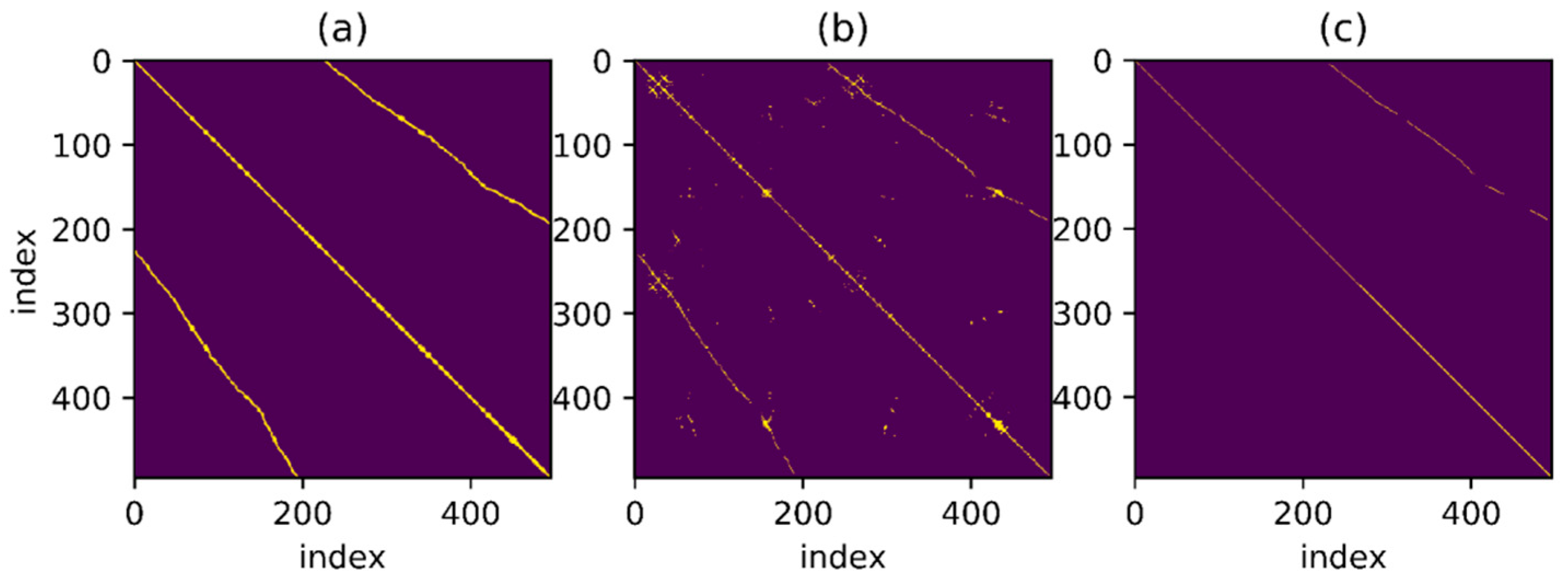
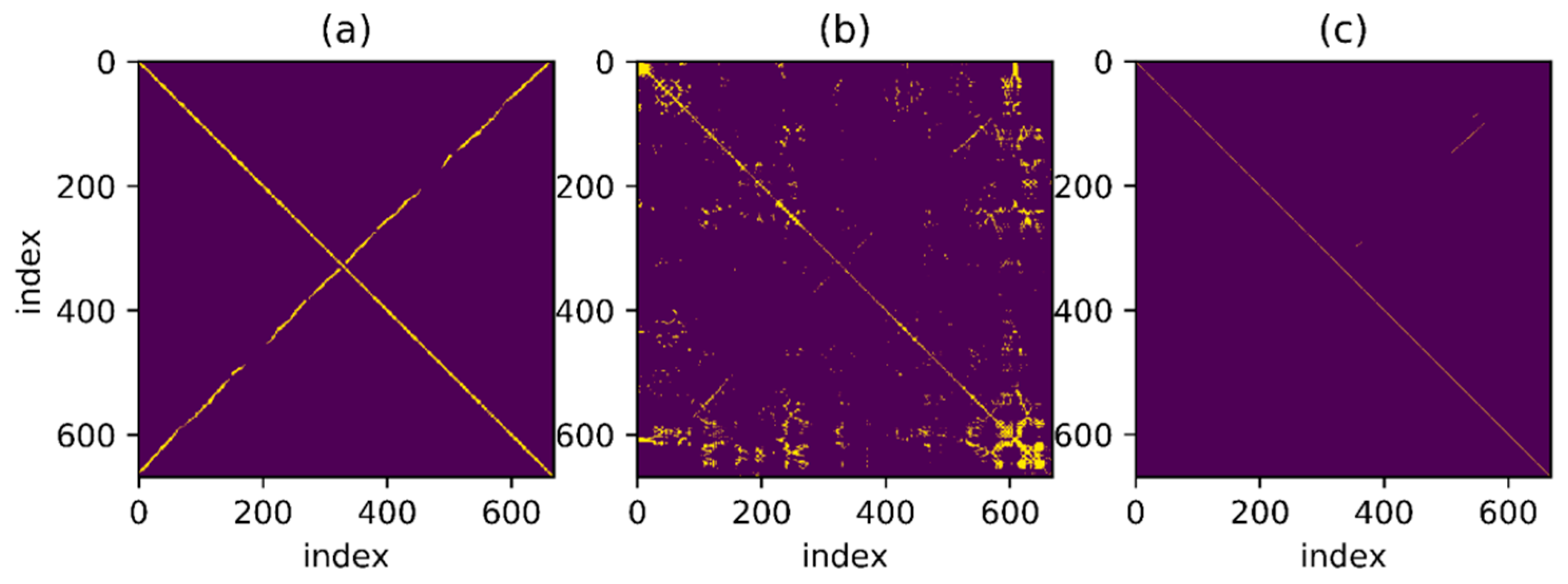
4.2. Comparison between Raw Magnetic Features and Magnetic Features after FFT
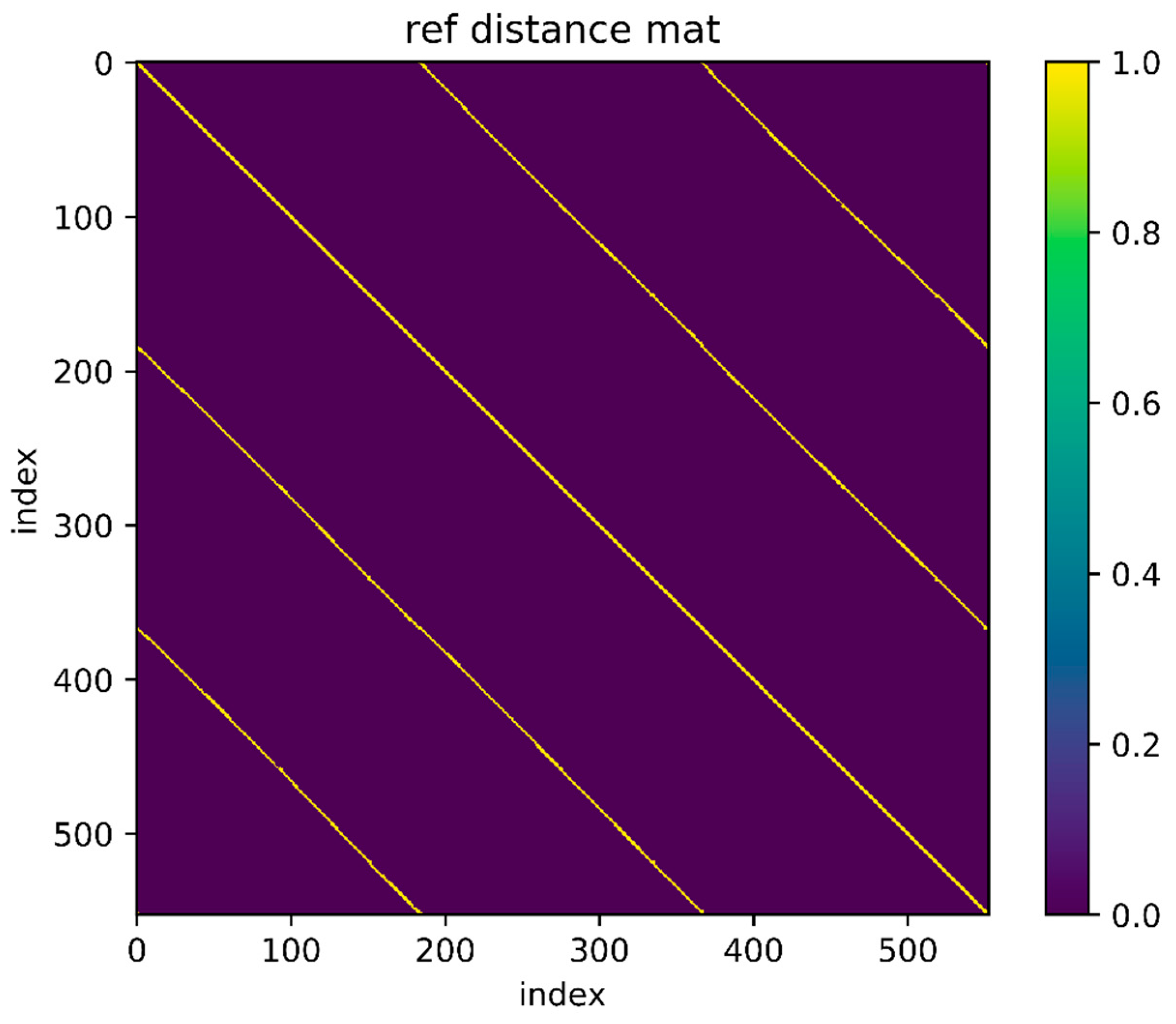
4.3. Sequence Matching Algorithm Based on RANSAC
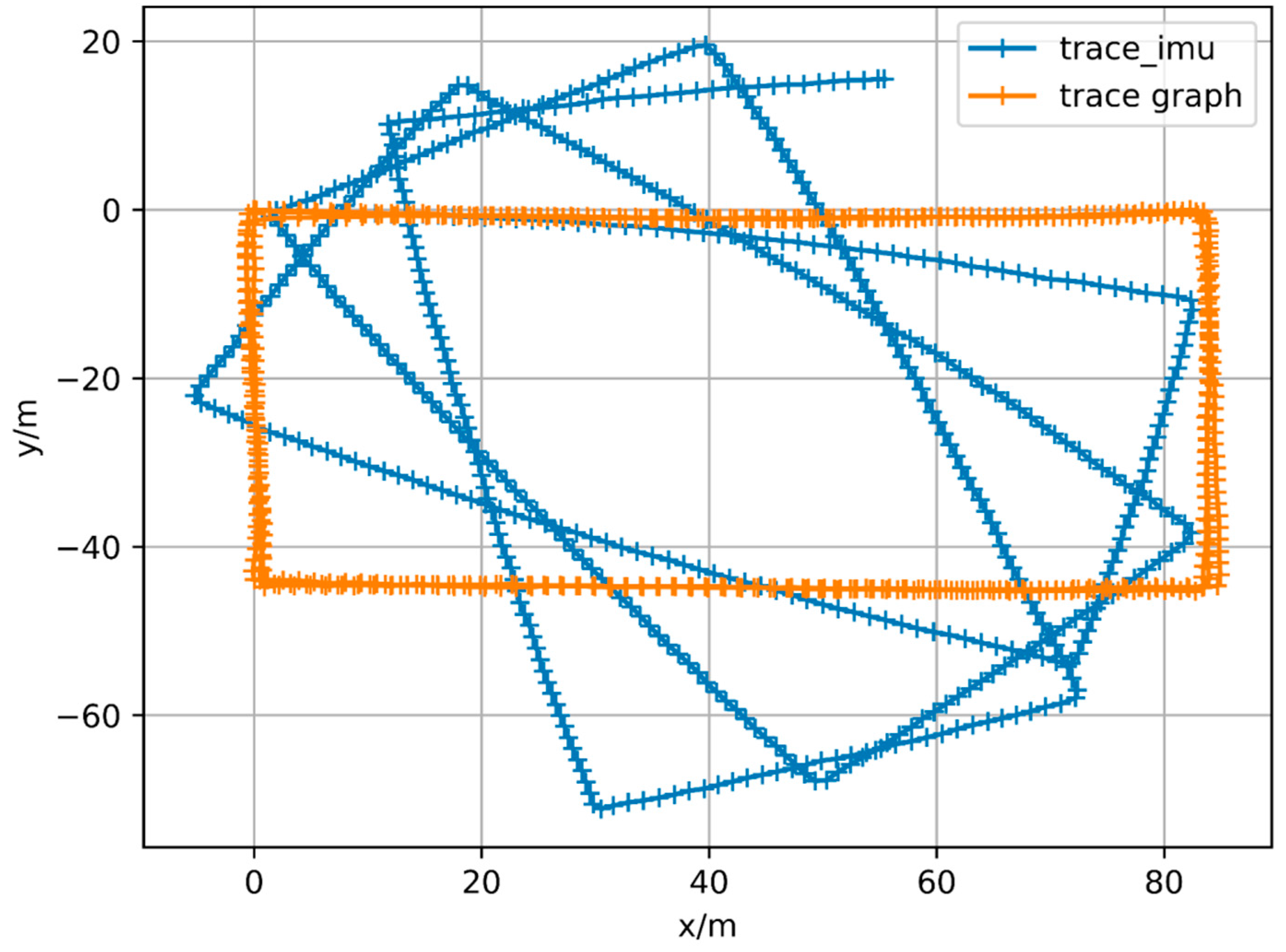
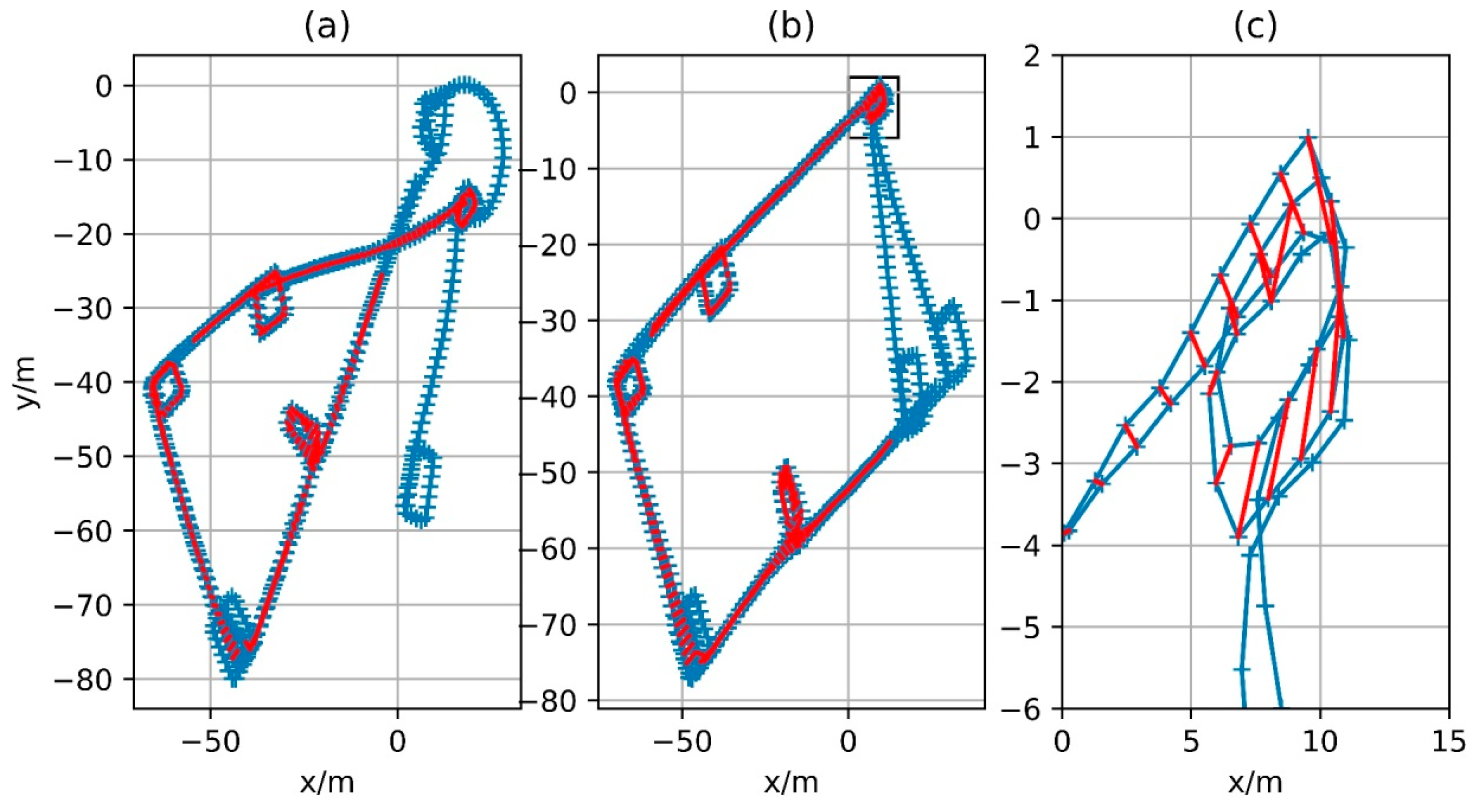
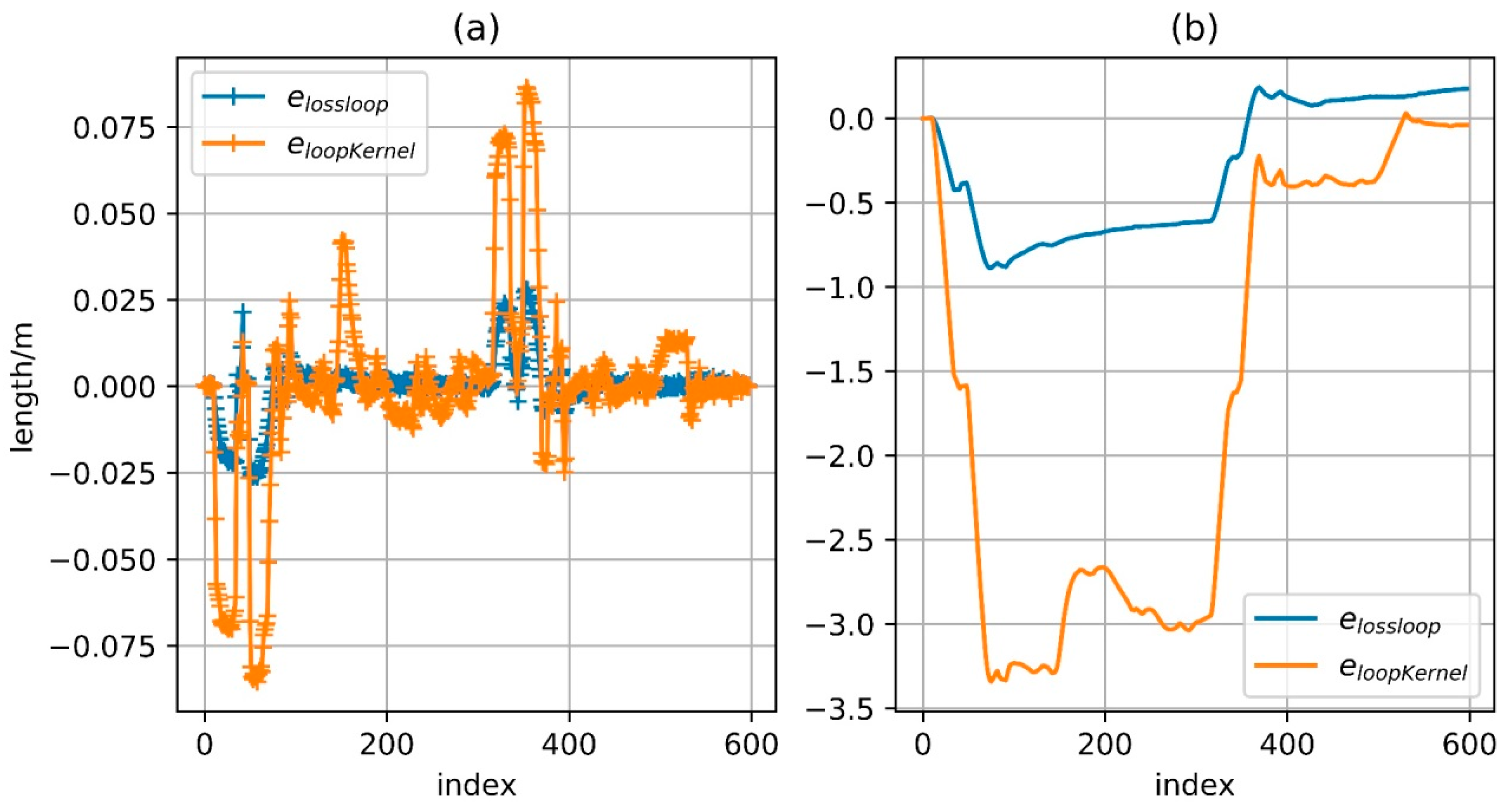
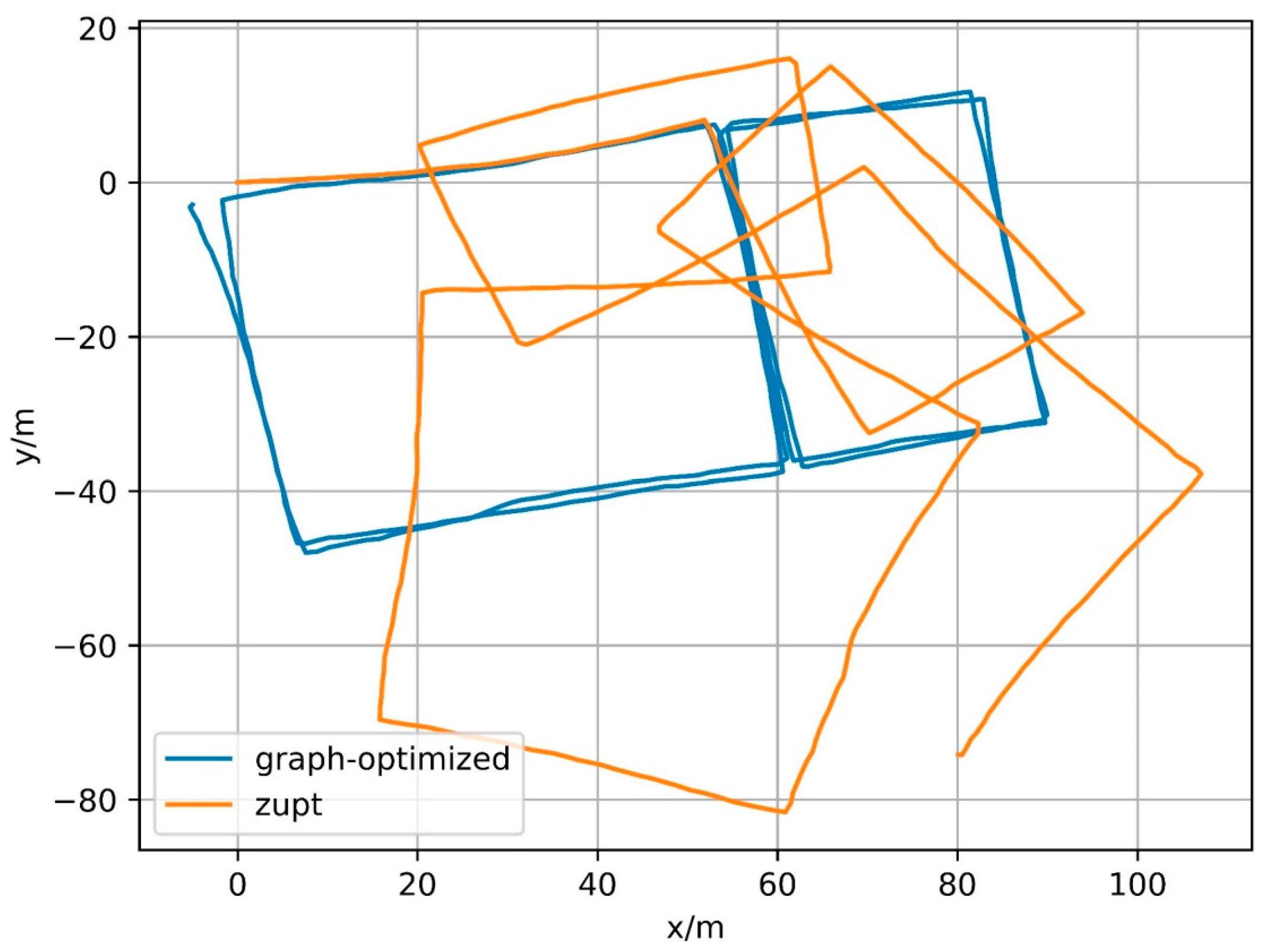
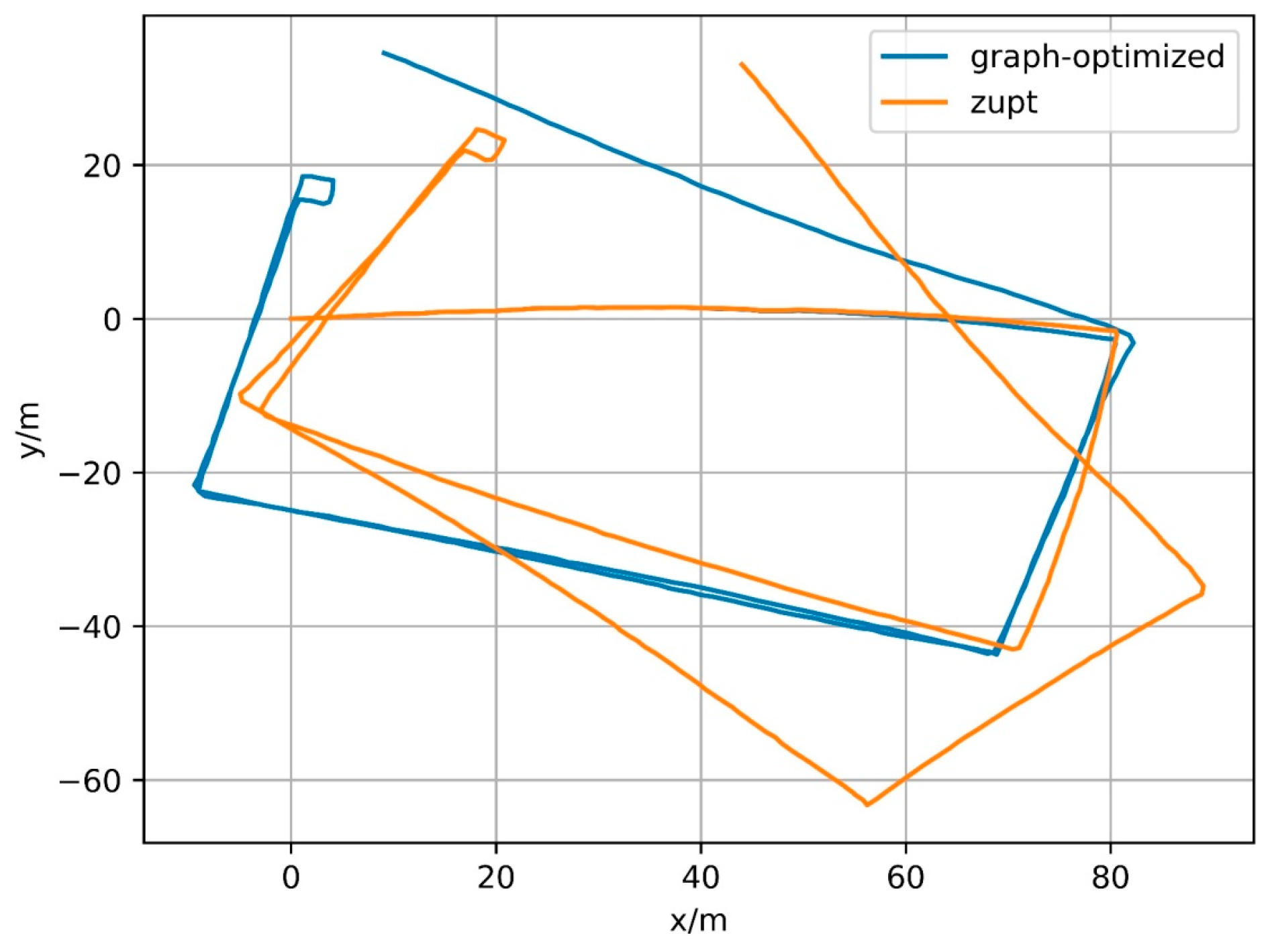
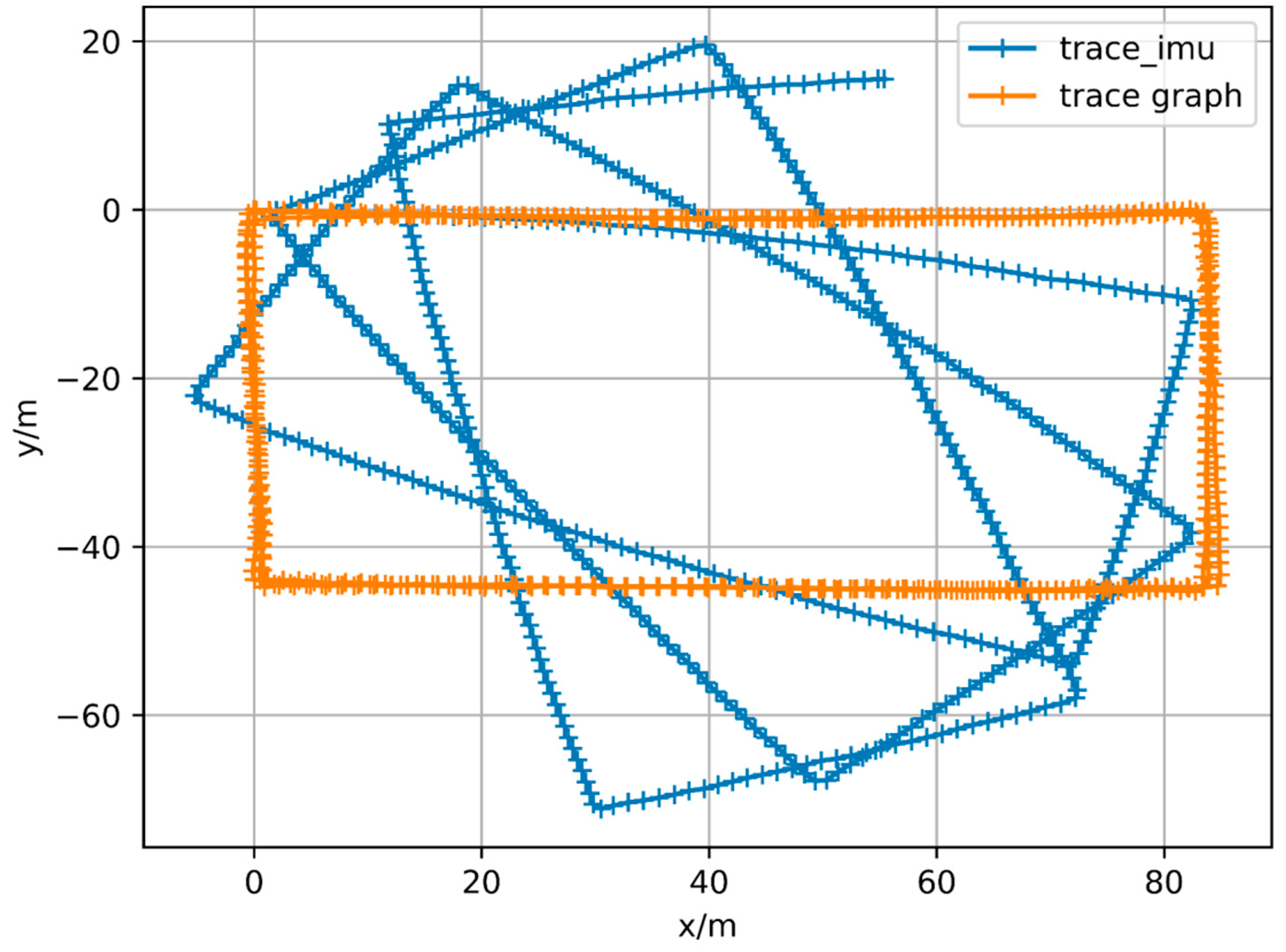
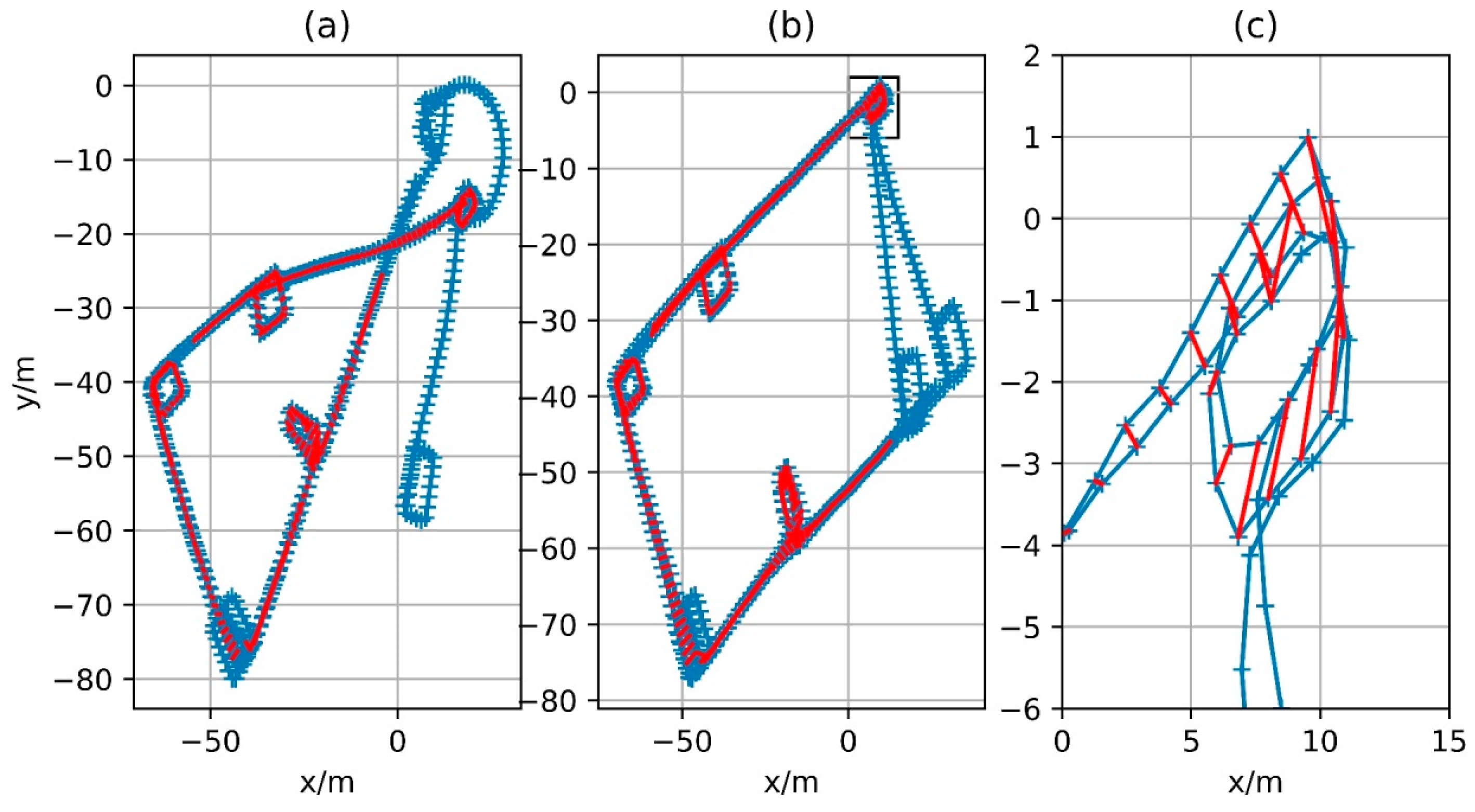
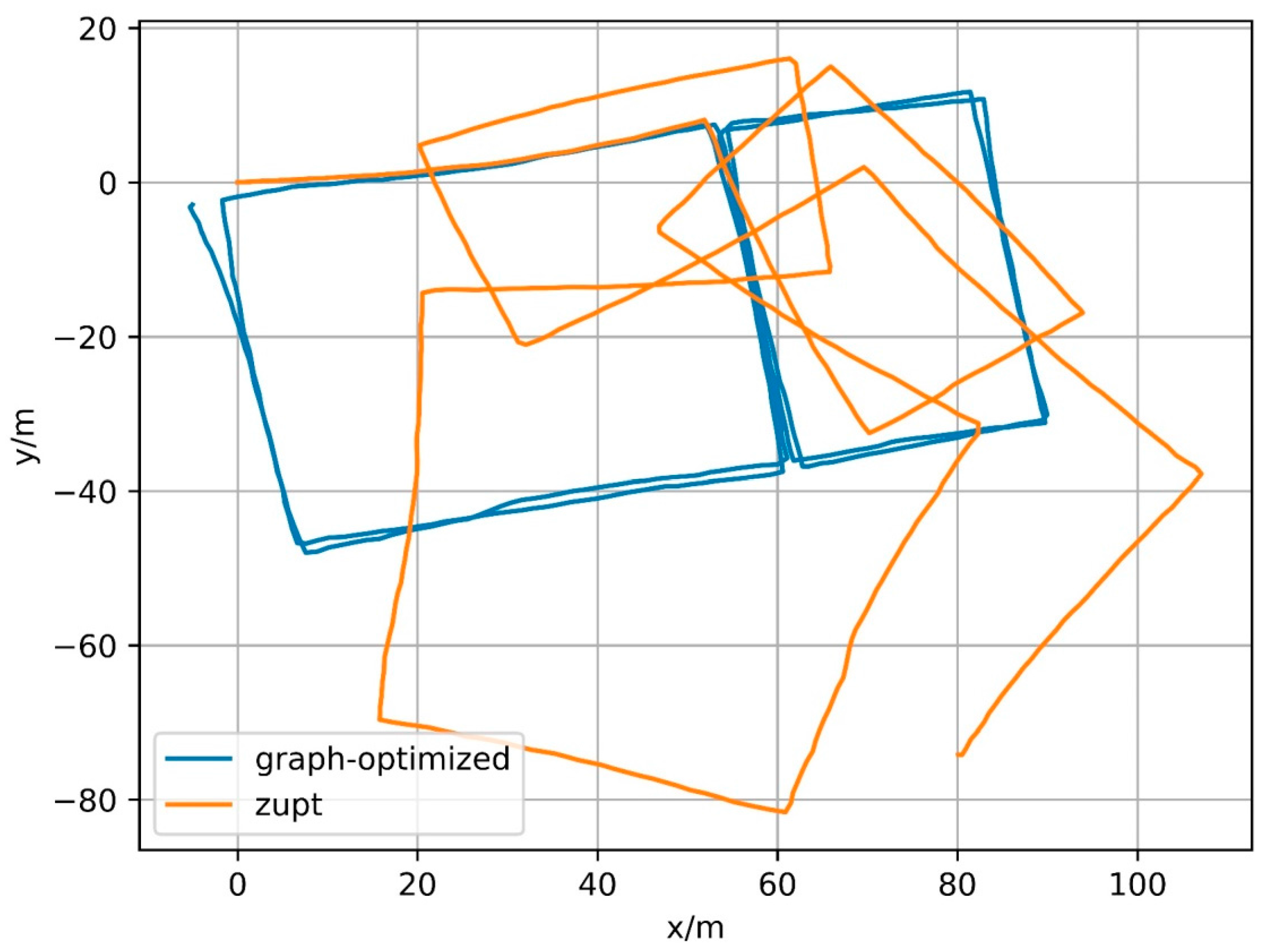
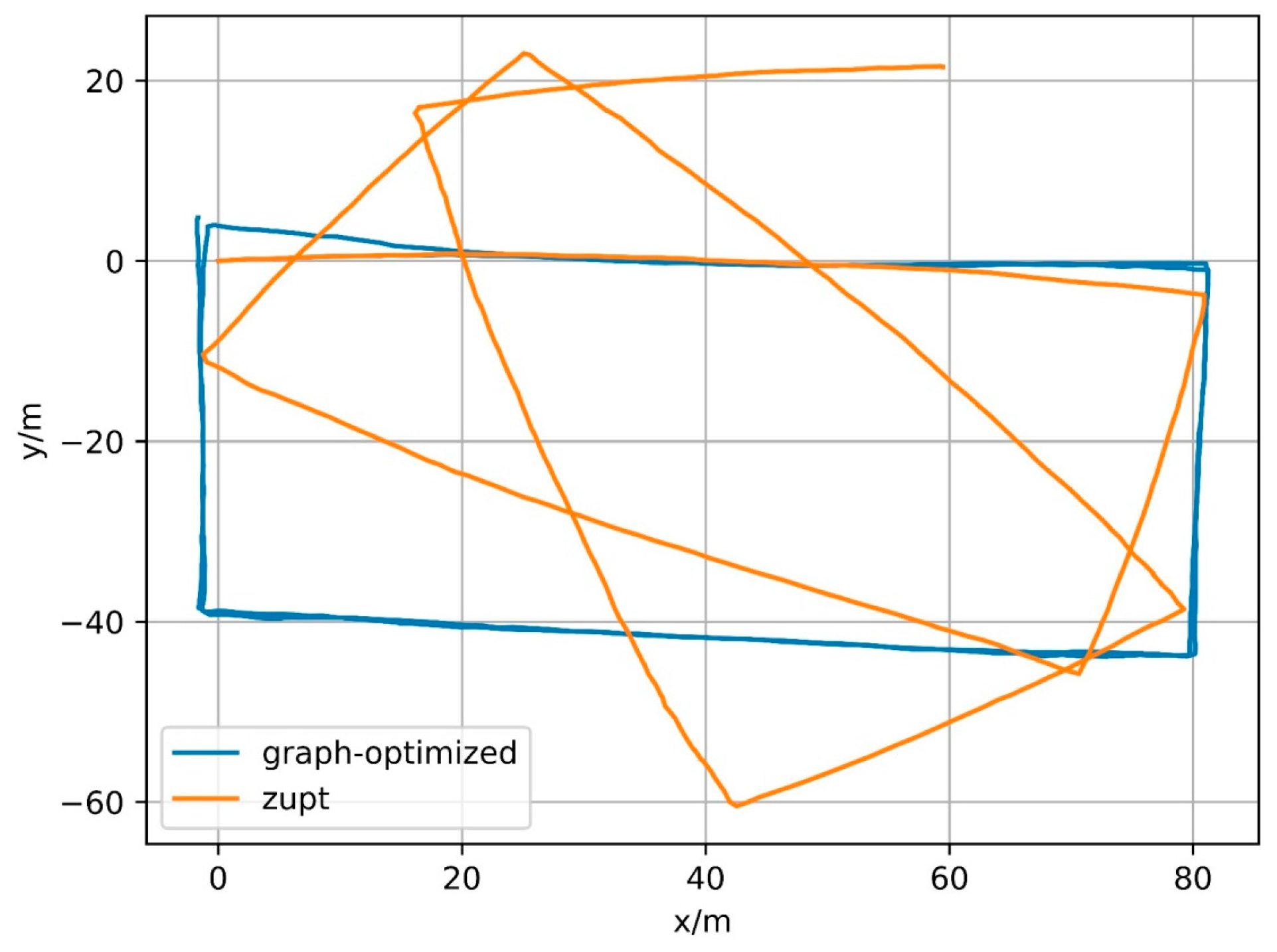
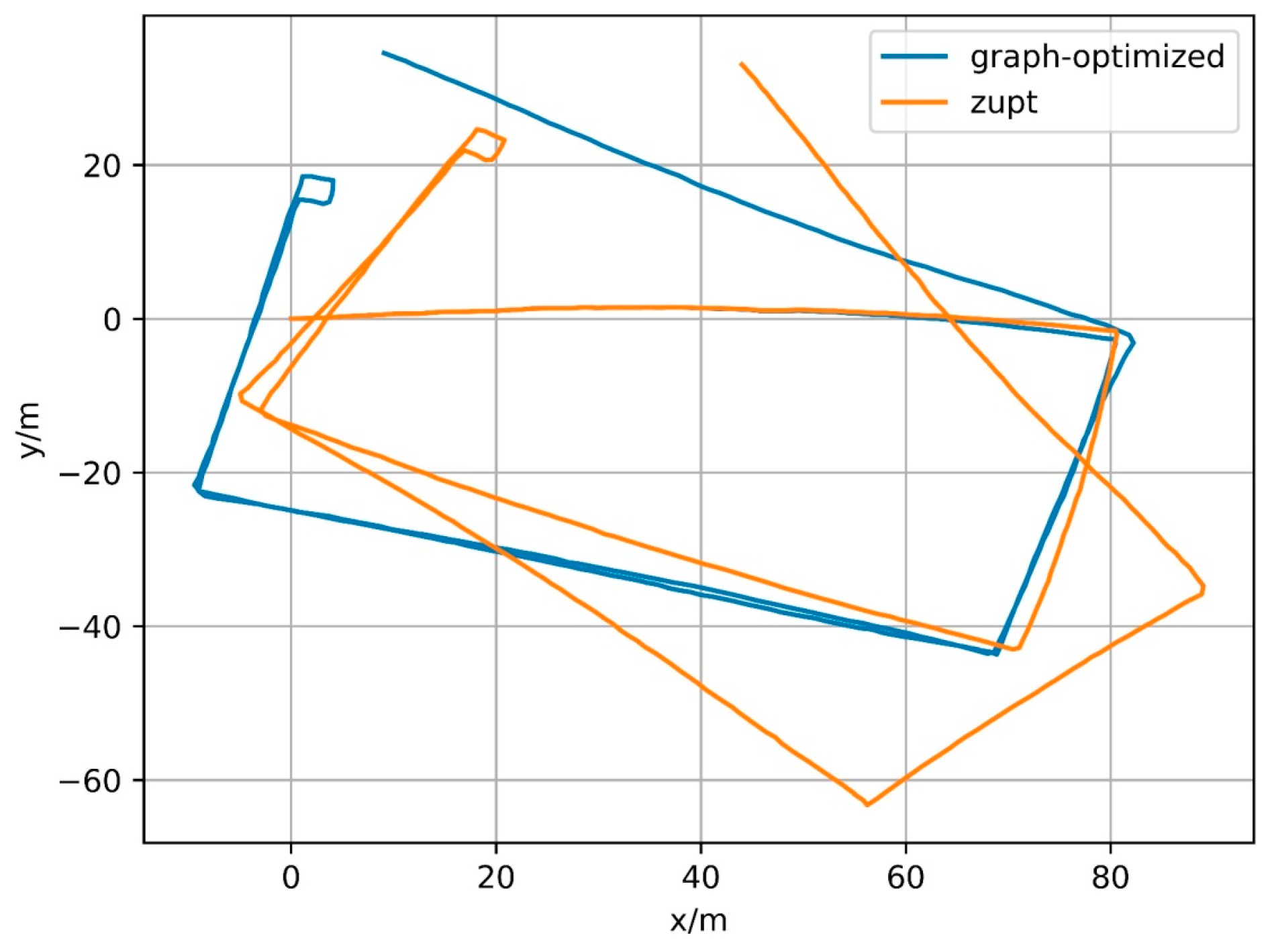
4.4. Positioning Results Based on Magnetometer Constraint
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yuechun, C.; Ganz, A. A UWB-based 3D location system for indoor environments. In Proceedings of the 2nd International Conference on Broadband Networks (BROADNETS 2005), Boston, MA, USA, 3–7 October 2005; pp. 224–232. [Google Scholar]
- Daixian, Z.; Kechu, Y. Particle filter localization in underground mines using UWB ranging. In Proceedings of the 4th International Conference on Intelligent Computation Technology and Automation (ICICTA 2011), Shenzhen, China, 28–29 March 2011; pp. 645–648. [Google Scholar]
- Renaudin, V.; Merminod, B.; Kasser, M. Optimal data fusion for pedestrian navigation based on UWB and MEMS. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 341–349. [Google Scholar]
- Vissiere, D.; Martin, A.; Petit, N. Using magnetic disturbances to improve IMU-based position estimation. In Proceedings of the European Control Conference, Kos, Greece, 2–5 July 2007; pp. 2853–2858. [Google Scholar]
- Le Grand, E.; Thrun, S. 3-Axis magnetic field mapping and fusion for indoor localization. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Hamburg, Germany, 13–15 September 2012; pp. 358–364. [Google Scholar]
- Kloch, K.; Lukowicz, P.; Fischer, C. Collaborative PDR localisation with mobile phones. In Proceedings of the International Symposium on Wearable Computers (ISWC), San Francisco, CA, USA, 12–15 June 2011; pp. 37–40. [Google Scholar]
- Nilsson, J.; Skog, I.; Händel, P. A note on the limitations of ZUPTs and the implications on sensor error modeling. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 13–15. [Google Scholar]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/Wi-Fi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication 2007 (WPNC’07), Hannover, Germany, 22 March 2007; pp. 1–7. [Google Scholar]
- Li, X.; Wang, J.; Liu, C. A bluetooth/PDR integration algorithm for an indoor positioning system. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef] [PubMed]
- Chandel, V.; Ahmed, N.; Arora, S.; Ghose, A. InLoc: An end-to-end robust indoor localization and routing solution using mobile phones and ble beacons. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar]
- Wang, Y.; Li, X. The IMU/UWB Fusion Positioning Algorithm Based on Particle Filter. ISPRS Int. J. Geo-Inf. 2017, 6, 235. [Google Scholar] [CrossRef]
- Zwirello, L.; Ascher, C.; Trommer, G.F.; Zwick, T. Study on UWB/INS integration techniques. In Proceedings of the 8th Workshop on Positioning Navigation and Communication 2011 (WPNC 2011), Dresden, Germany, 7–8 April 2011; pp. 13–17. [Google Scholar]
- Fan, Q.; Sun, B.; Sun, Y.; Wu, Y.; Zhuang, X. Data Fusion for Indoor Mobile Robot Positioning Based on Tightly Coupled INS/UWB. J. Navig. 2017, 70, 1079–1097. [Google Scholar] [CrossRef]
- Frassl, M.; Angermann, M.; Lichtenstern, M.; Robertson, P.; Julian, B.J.; Doniec, M. Magnetic maps of indoor environments for precise localization of legged and non-legged locomotion. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 913–920. [Google Scholar]
- Pasku, V.; De Angelis, A.; Moschitta, A.; Carbone, P.; Nilsson, J.O.; Dwivedi, S.; Handel, P. A magnetic ranging aided dead-reckoning indoor positioning system for pedestrian applications. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Taipei, Taiwan, 23–26 May 2016. [Google Scholar]
- Jung, J.; Oh, T.; Myung, H. Magnetic field constraints and sequence-based matching for indoor pose graph SLAM. Robot. Auton. Syst. 2015, 70, 92–105. [Google Scholar] [CrossRef]
- Mirowski, P.; Ho, T.K.; Yi, S.; MacDonald, M. SignalSLAM: Simultaneous localization and mapping with mixed Wi-Fi, bluetooth, LTE and magnetic signals. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2013), Montbeliard-Belfort, France, 28–31 October 2013; pp. 28–31. [Google Scholar]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. Self-Contained Indoor Pedestrian Navigation Using Smartphone Sensors and Magnetic Features. IEEE Sens. J. 2016, 16, 7173–7182. [Google Scholar] [CrossRef]
- Hardegger, M.; Roggen, D.; Tröster, G. 3D ActionSLAM: Wearable person tracking in multi-floor environments. Pers. Ubiquitous Comput. 2015, 19, 123–141. [Google Scholar] [CrossRef]
- Skog, I.; Händel, P.; Nilsson, J.O.; Rantakokko, J. Zero-velocity detection-An algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Ting, J.A.; D’Souza, A.; Schaal, S. Automatic outlier detection: A Bayesian approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2489–2494. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Tang, H.; Liu, Y.; Li, L. Pose graph optimization with hierarchical conditionally independent graph partitioning. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 3255–3260. [Google Scholar]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Carlone, L.; Aragues, R.; Castellanos, J.A.; Bona, B. A fast and accurate approximation for planar pose graph optimization. Int. J. Robot. Res. 2014, 33, 965–987. [Google Scholar] [CrossRef]
- Barfoot, T.D. State Estimation for Robotics: A Matrix Lie Group Approach; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; pp. 6–15. [Google Scholar]
- Agarwal, P.; Tipaldi, G.D.; Spinello, L. Robot Map Optimization using Dynamic Covariance Scaling Maps are Essential for Effective Navigation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory | Global Average Error (m) | Average Error Under Closed Loop Constraint (m) |
|---|---|---|
| A | 2.75 | 2.15 |
| B | 0.54 | 0.40 |
| C | 1.09 | 0.96 |
| D | 3.41 | 1.63 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, X.; Zou, J. A Foot-Mounted Inertial Measurement Unit (IMU) Positioning Algorithm Based on Magnetic Constraint. Sensors 2018, 18, 741. https://doi.org/10.3390/s18030741
Wang Y, Li X, Zou J. A Foot-Mounted Inertial Measurement Unit (IMU) Positioning Algorithm Based on Magnetic Constraint. Sensors. 2018; 18(3):741. https://doi.org/10.3390/s18030741
Chicago/Turabian StyleWang, Yan, Xin Li, and Jiaheng Zou. 2018. "A Foot-Mounted Inertial Measurement Unit (IMU) Positioning Algorithm Based on Magnetic Constraint" Sensors 18, no. 3: 741. https://doi.org/10.3390/s18030741
APA StyleWang, Y., Li, X., & Zou, J. (2018). A Foot-Mounted Inertial Measurement Unit (IMU) Positioning Algorithm Based on Magnetic Constraint. Sensors, 18(3), 741. https://doi.org/10.3390/s18030741