Coherent and Noncoherent Joint Processing of Sonar for Detection of Small Targets in Shallow Water


Abstract
:1. Introduction
2. Coherent-Noncoherent Processing Framework
2.1. Transmitting Diversity
2.2. Broadband Signal Model
2.3. Estimation of Target Bearing and Range
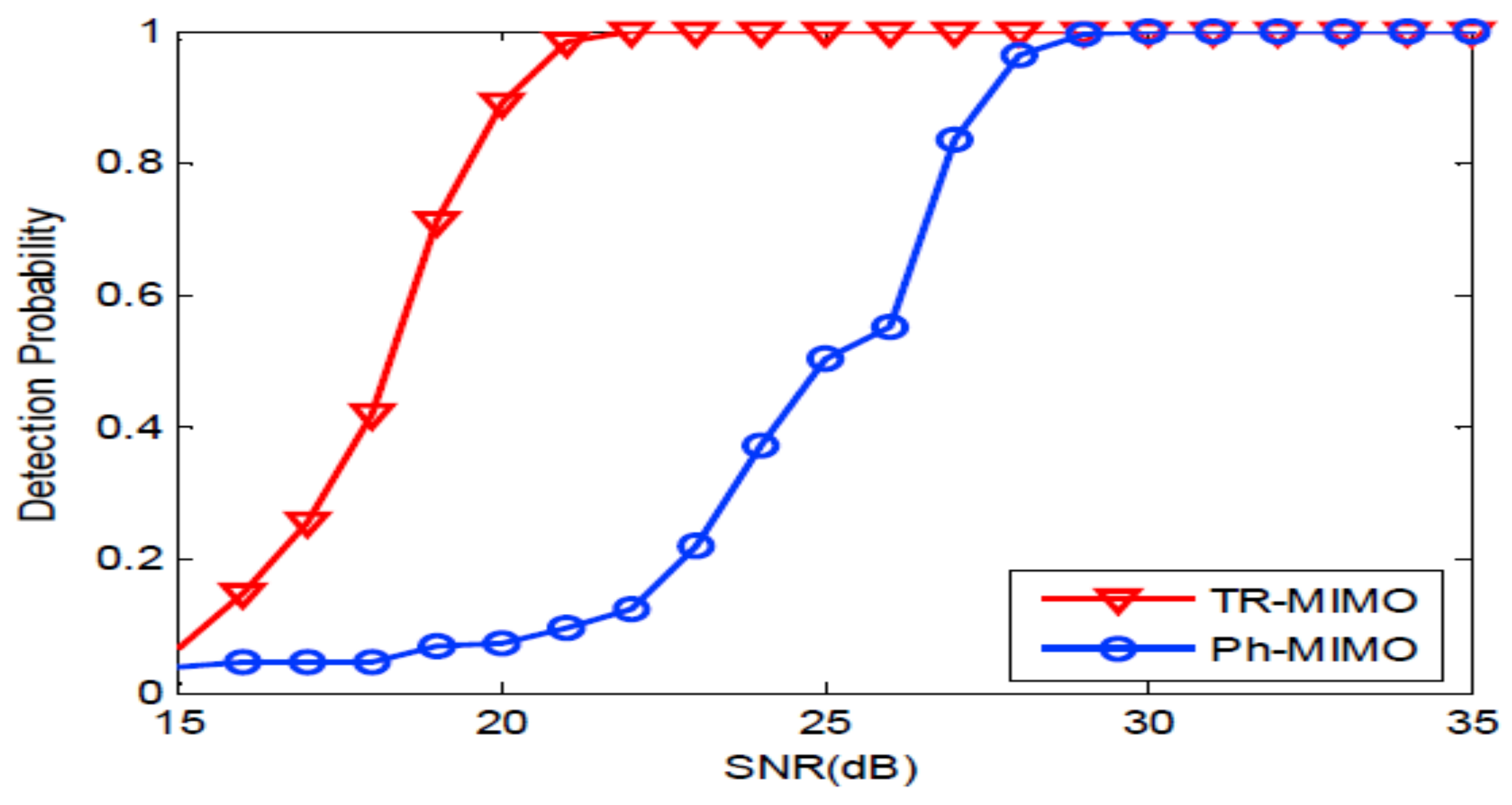
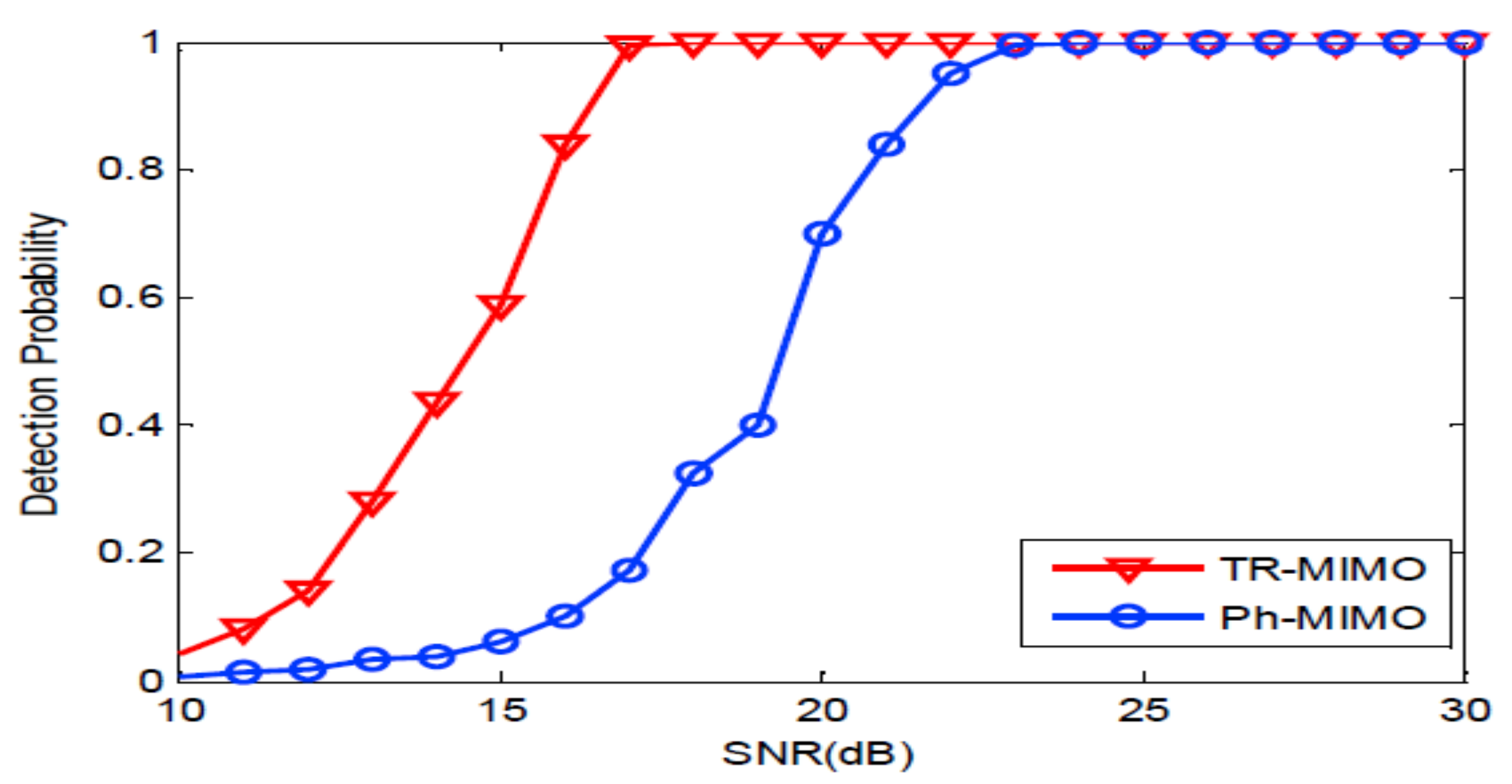
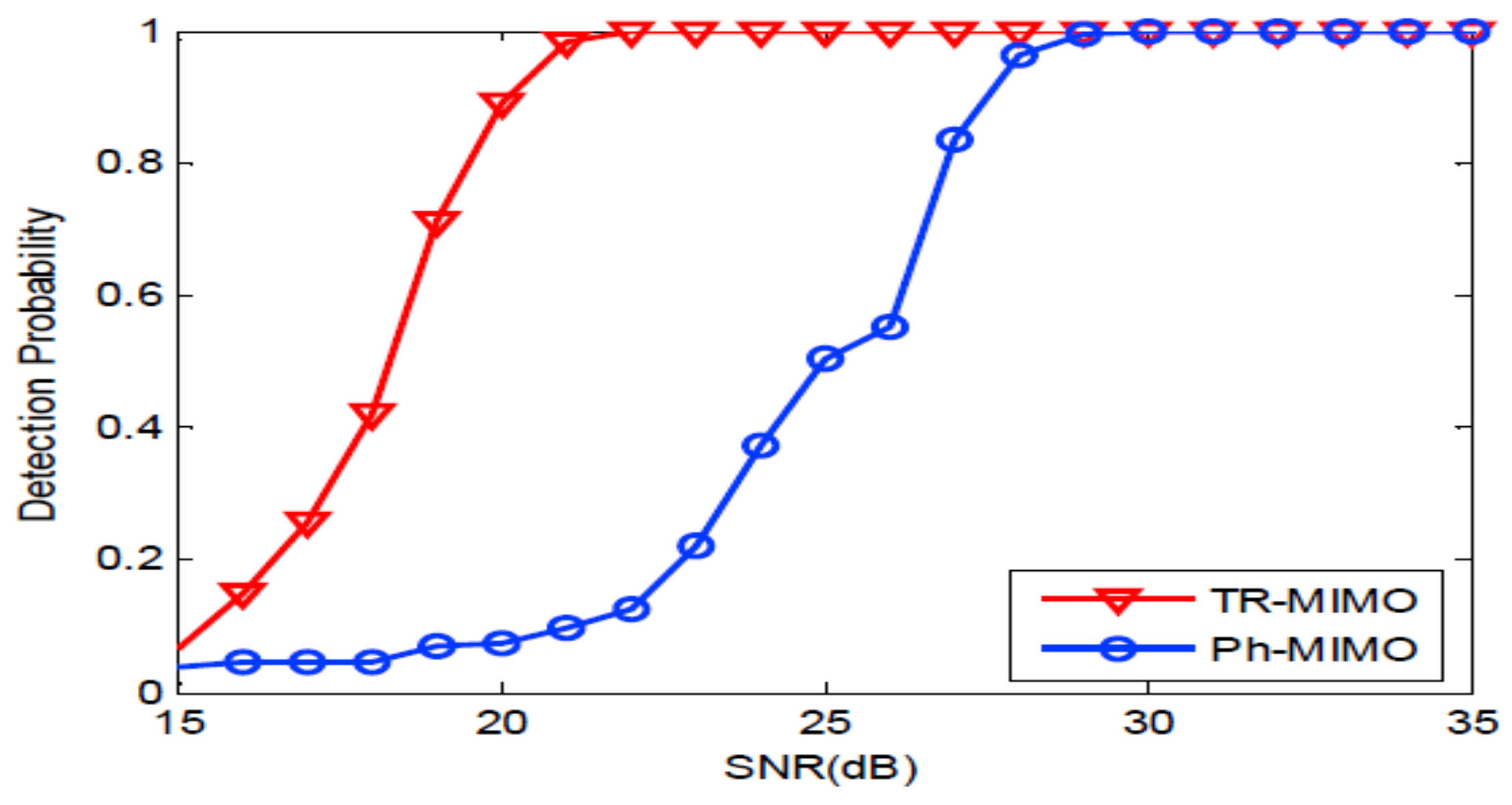
2.4. Target Detection
3. Numerical Simulations
3.1. Exploiting Spatial Diversity for Time-Reversal Focusing
3.2. Performance Improvement
4. At-Lake Experimental Results and Data Analysis
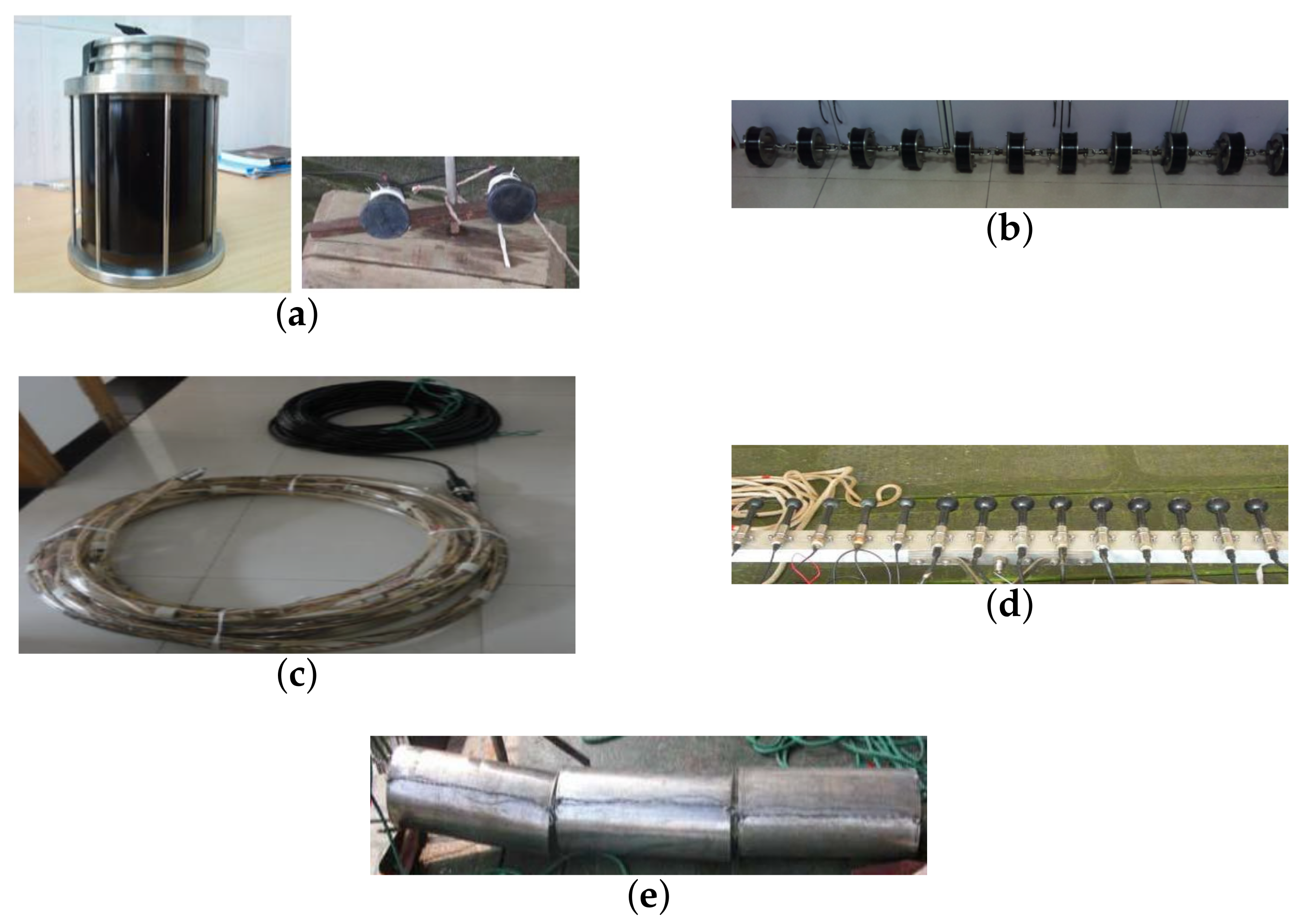
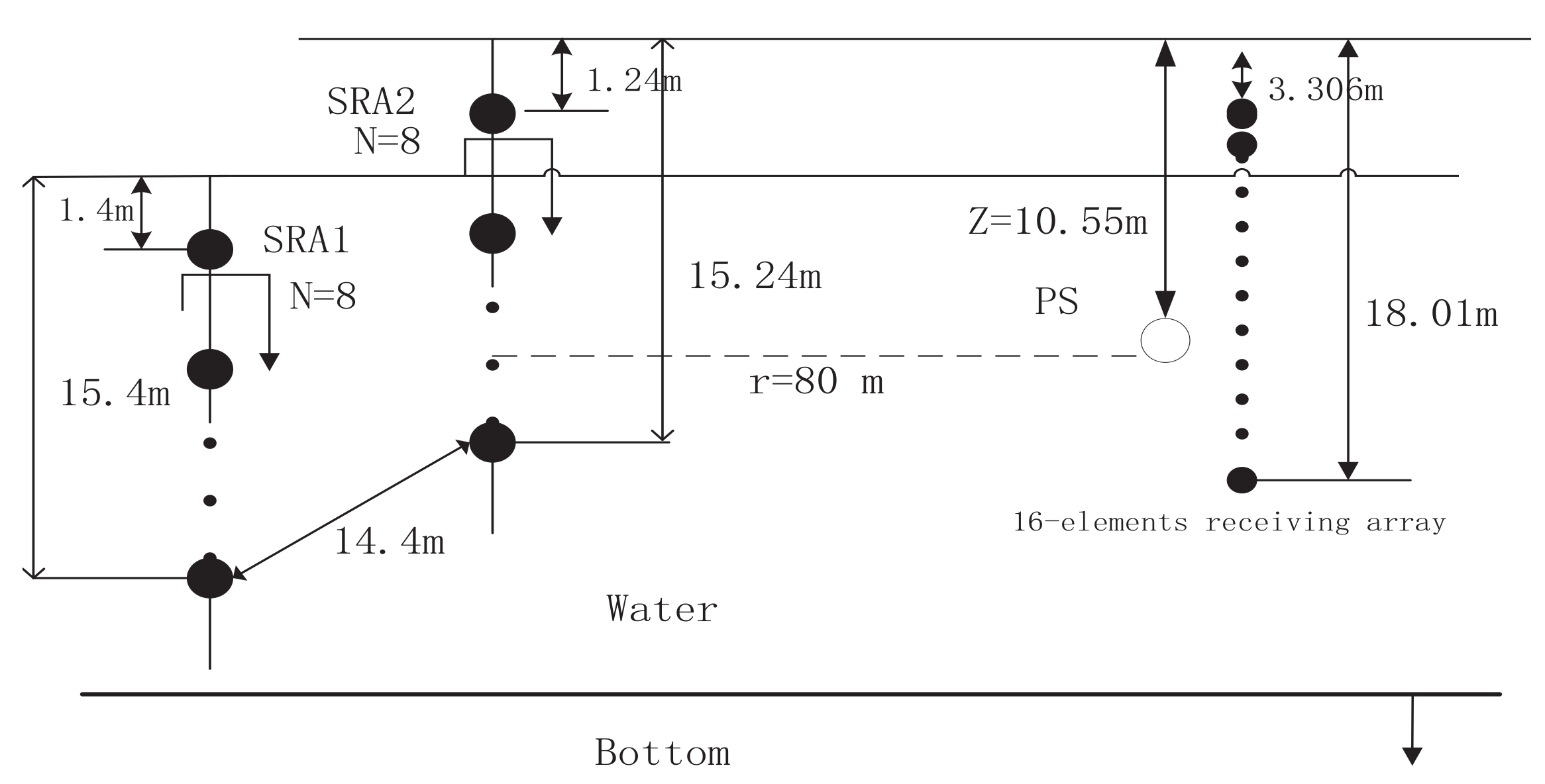
4.1. Experimental System
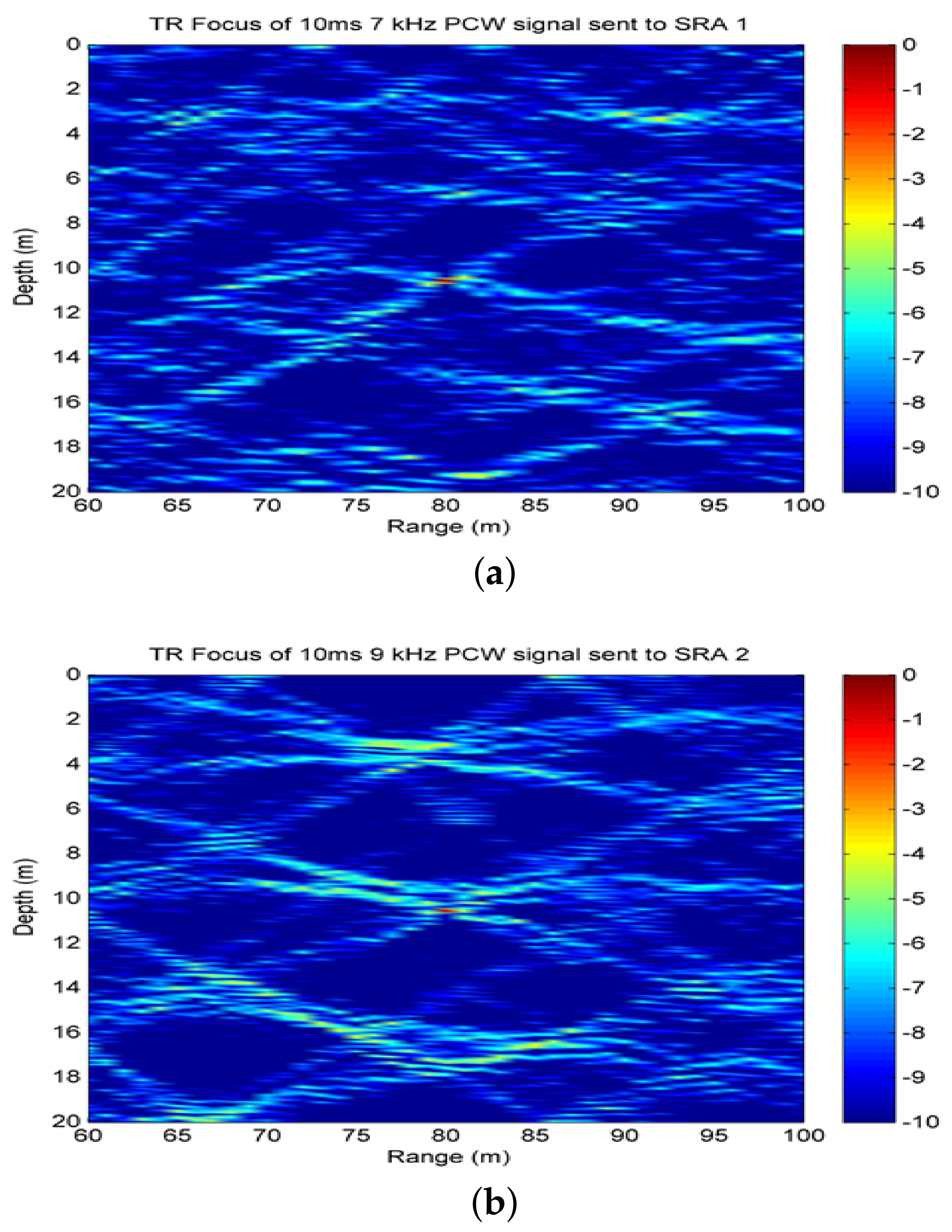
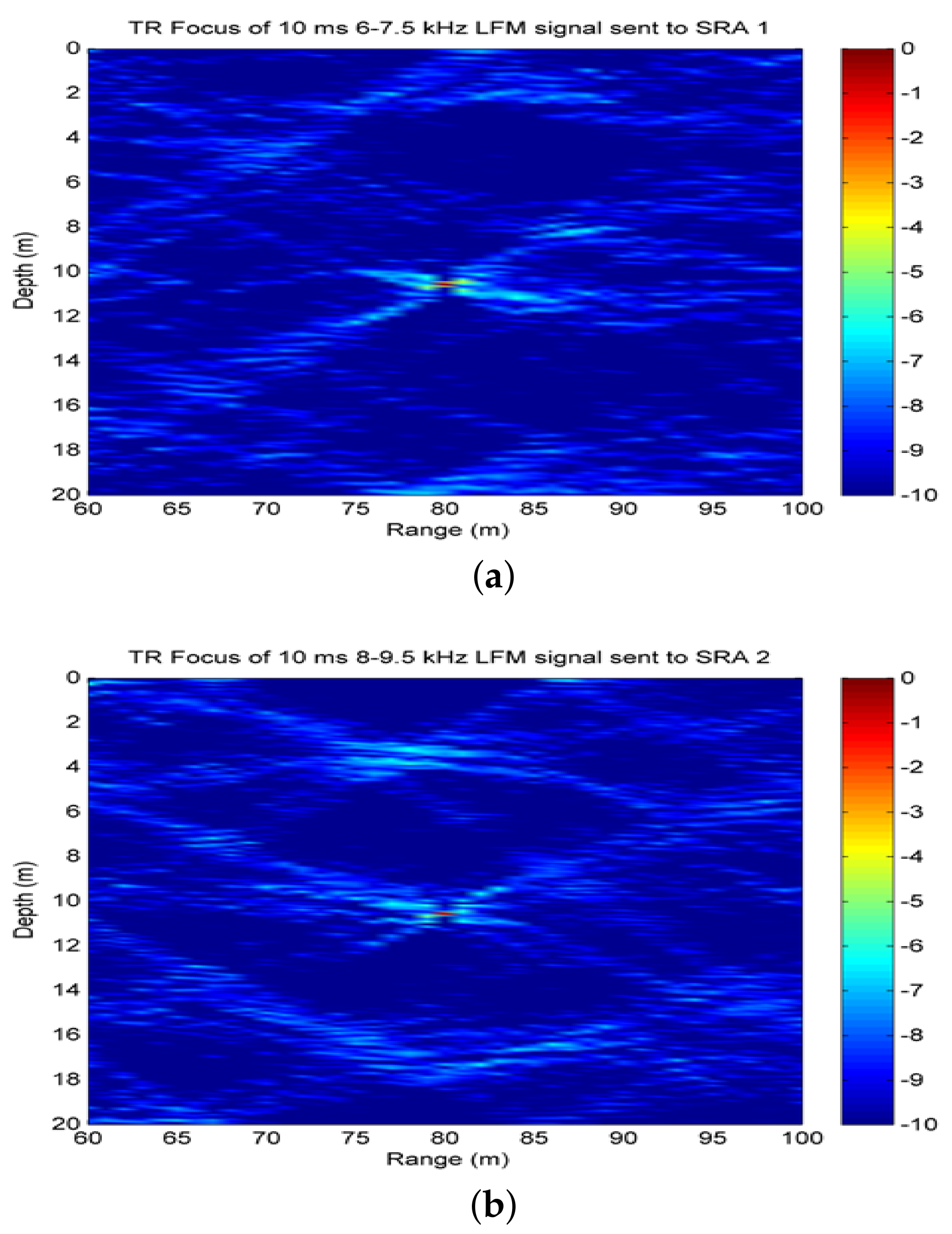
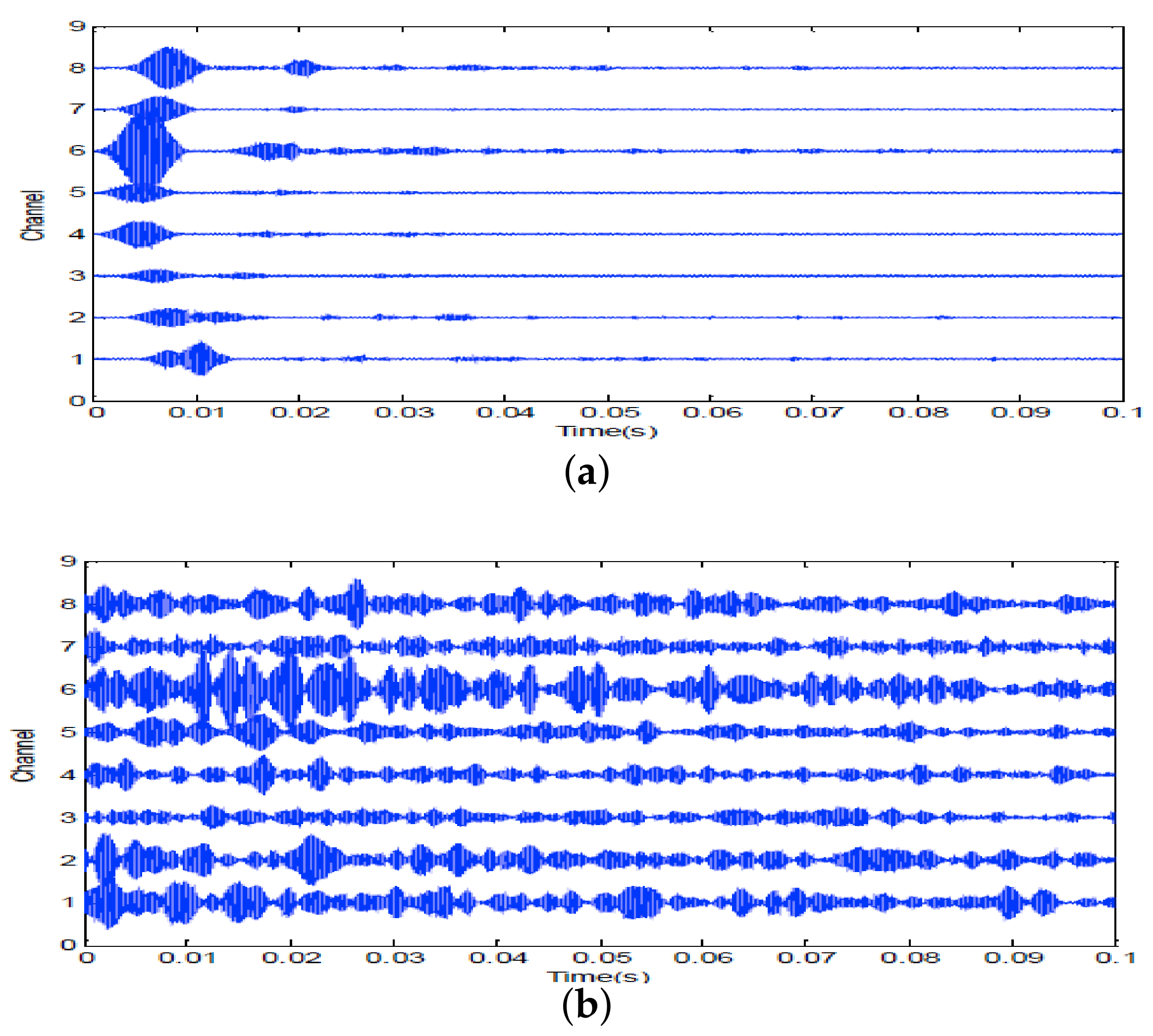
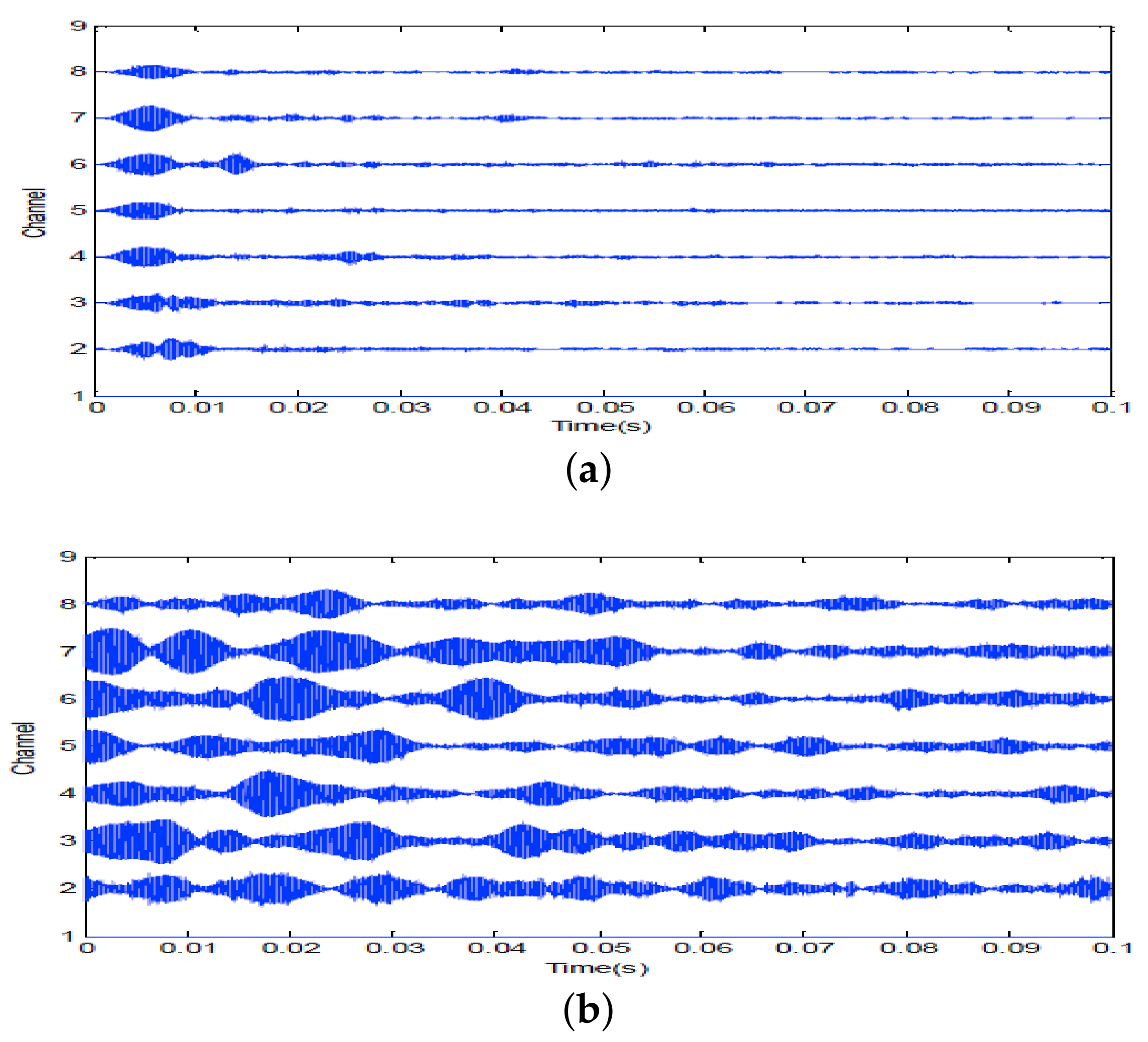
4.2. Time-Reversal Focusing
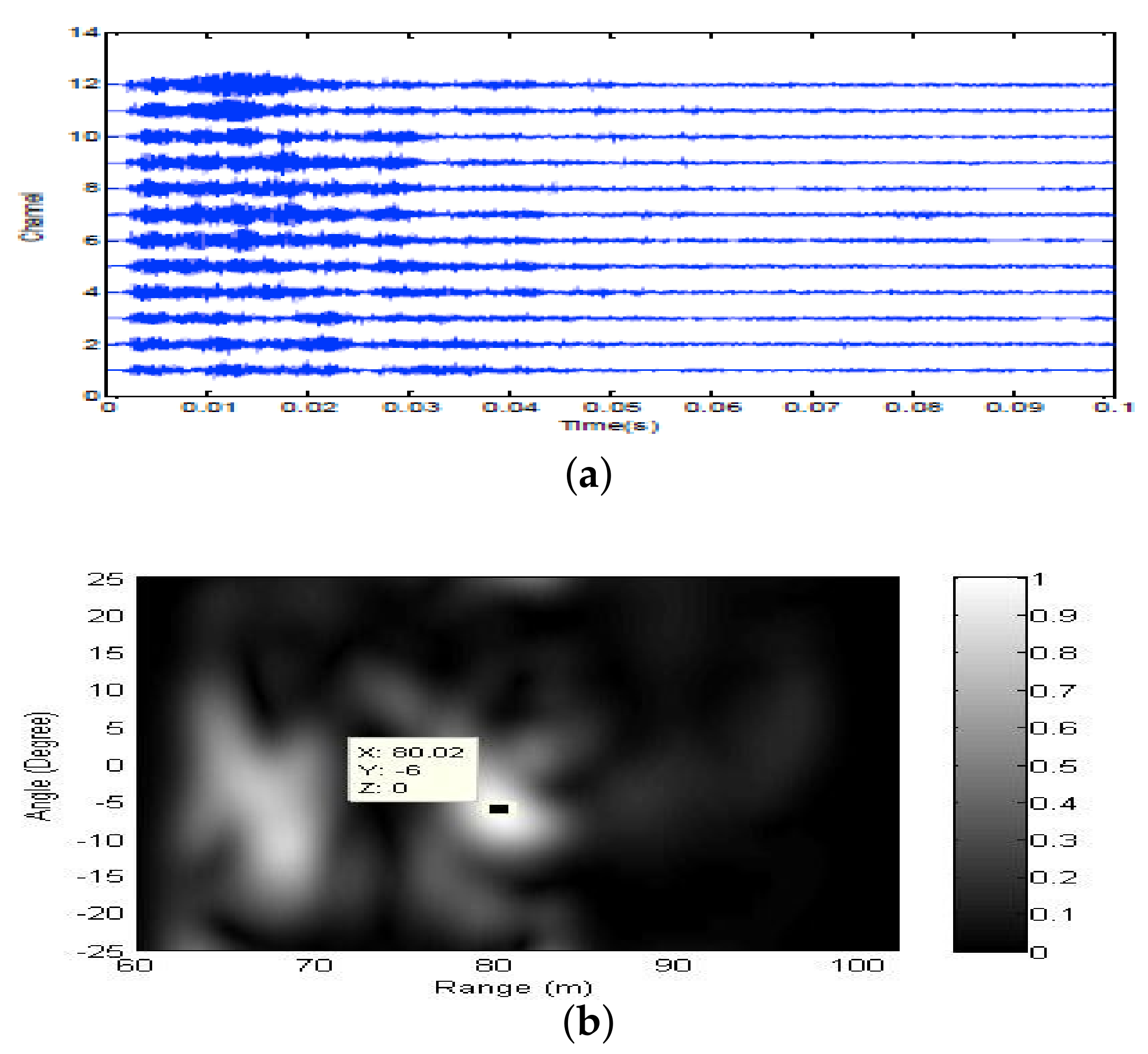
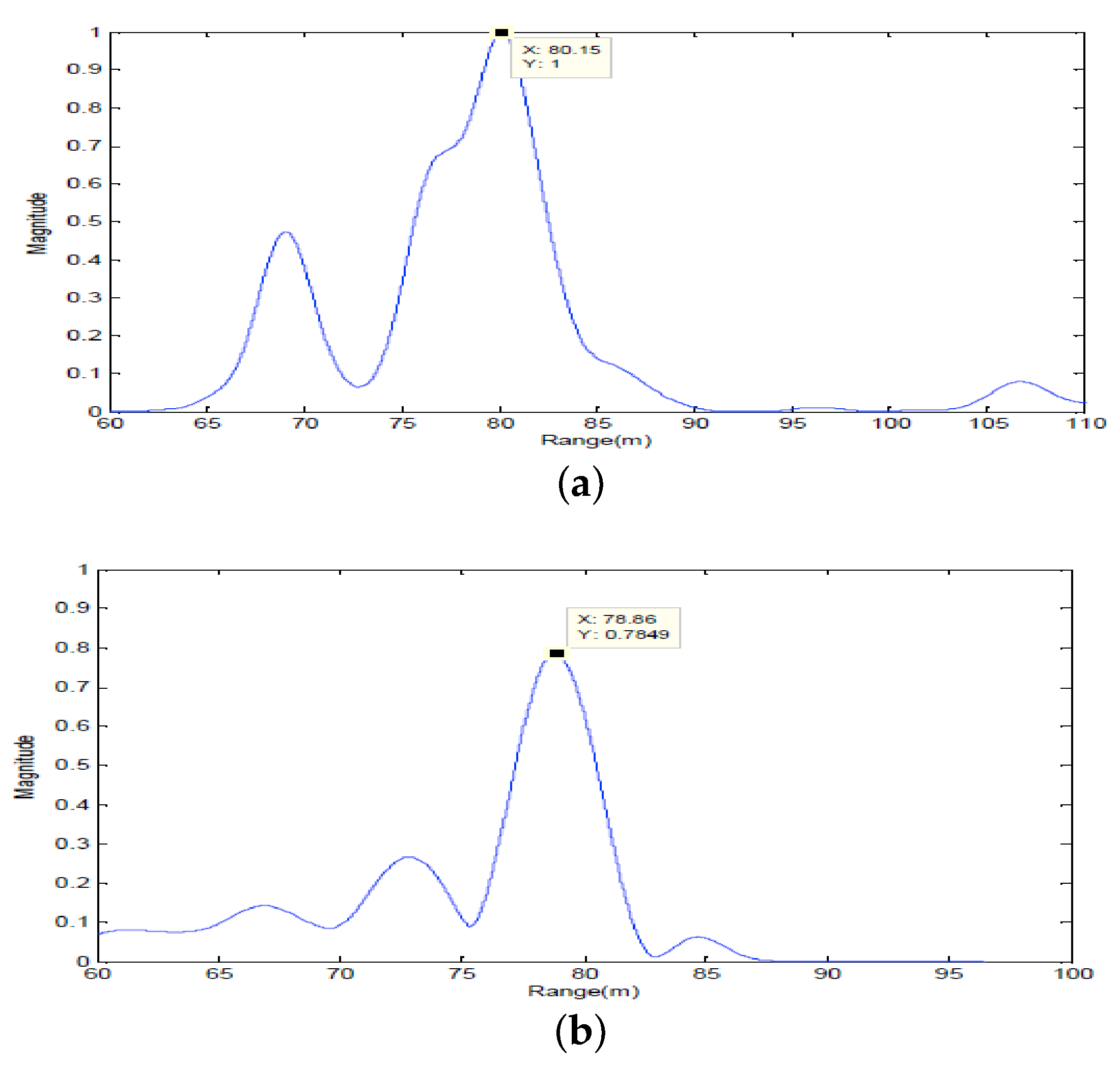
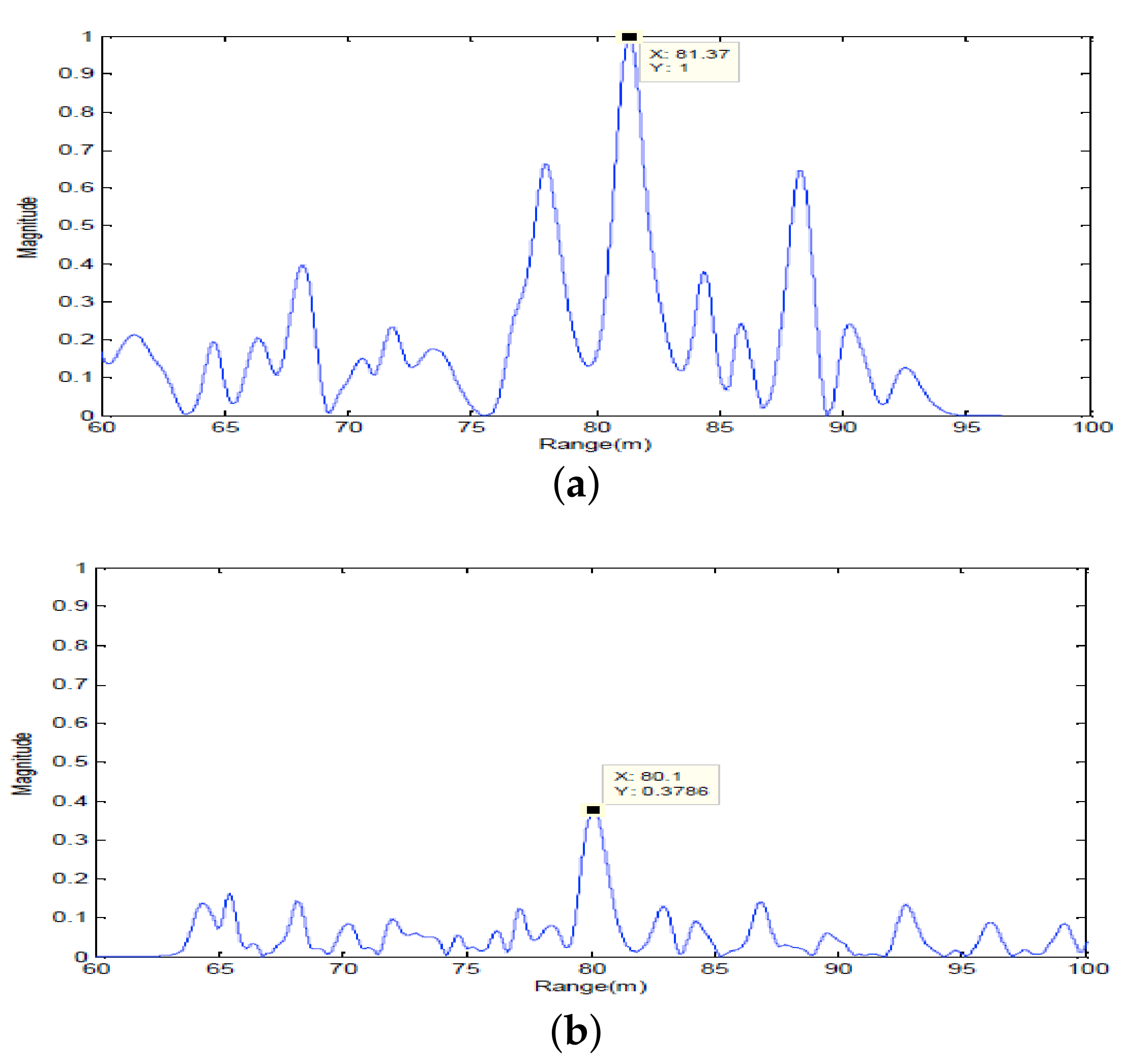
4.3. Target Localization
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ling, J.; Xu, L.Z.; Li, J. Adaptive range-Doppler imaging and target parameter estimation in multistatic active sonar systems. IEEE J. Ocean. Eng. 2014, 39, 290–302. [Google Scholar] [CrossRef]
- Liang, J.L.; Xu, L.Z.; Li, J.; Stoica, P. On designing the transmission and reception of multistatic continuous active sonar systems. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 285–299. [Google Scholar] [CrossRef]
- Hanusa, E.; Krout, D.W.; Gupta, M.R. Contact clustering and fusion for preprocessing multistatic active sonar data. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 522–529. [Google Scholar]
- Georgescu, R.; Willett, P. Predetection fusion with Doppler measurements and amplitude information. IEEE J. Ocean. Eng. 2012, 37, 56–65. [Google Scholar] [CrossRef]
- McGee, J.; Catipovic, J.; Swaszek, P. Applying spatial diversity to mitigate partial band interference in undersea networks. In Proceedings of the 2014 Wireless Telecommunications Symposium, Washington, DC, USA, 9–11 April 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Song, H.C.; Hodgkiss, W.S. Self-synchronization and spatial diversity of passive time reversal communication. J. Acoust. Soc. Am. 2015, 137, 2974–2977. [Google Scholar] [CrossRef] [PubMed]
- Zou, X.; James, A. Experiment results of iterative block-based decision feedback equalizer with spatial diversity in underwater acoustic channels. In Proceedings of the 2013 Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 2013; pp. 728–730. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, A. Spatial diversity in radar-models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Pailhas, Y.; Petillot, Y. Large MIMO sonar systems: A tool for underwater surveillance. In Proceedings of the 2014 Sensor Signal Processing for Defence, Edinburgh, UK, 8–9 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, G.; Wang, F.P.; Li, S.Q. A broadband high-resolution beamforming method for co-located multiple-input multiple-output sonars. China Appl. Acoust. 2011, 2, 131–137. [Google Scholar]
- Zhang, L.J.; Huang, J.G.; Jin, Y.; Hua, Y.S.; Jiang, M.; Zhang, Q.F. Waveform diversity based sonar system for target localization. J. Sys. Eng. Electron. 2010, 21, 186–190. [Google Scholar] [CrossRef]
- Yang, T.C. Measurements of spatial coherence, beamforming gain and diversity gain for underwater acoustic communications. In Proceedings of the MTS/IEEE OCEANS’05, Washington, DC, USA, 17–23 September 2005; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, T.C. Modeling and interpretation of beamforming gain and diversity gain for underwater acoustic communications. In Proceedings of the MTS/IEEE OCEANS’06, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, T.C. A study of spatial processing gain in underwater acoustic communications. IEEE J. Ocean. Eng. 2007, 32, 689–709. [Google Scholar] [CrossRef]
- Gaumond, C.F.; Fromm, D.M.; Lingevitch, J.F.; Menis, R.; Edelmann, G.F. Demonstration at sea of the decomposition-of-the-time-reversal operator technique. J. Acoust. Soc. Am. 2006, 119, 976–990. [Google Scholar] [CrossRef]
- Robert, J.L.; Fink, M. Spatio-temporal invariants of the time reversal operator. J. Acoust. Soc. Am. 2010, 127, 2904–2912. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kuperman, W.A.; Hodgkiss, W.S.; Song, H.C.; Edelmann, G.; Akal, A. Echo-to-reverberation enhancement using a time reversal mirror. J. Acoust. Soc. Am. 2004, 115, 1525–1531. [Google Scholar] [CrossRef]
- Fink, M. Time reversal of ultrasonic fields. I. Basic principles. Phys. Rev. Lett. 1992, 92, 187–201. [Google Scholar] [CrossRef] [PubMed]
- Lerosey, G.; de Rosny, J.; Tourin, A.; Derode, A.; Montaldo, G.; Fink, M. Time reversal of ultrasonic fields. I. Basic principles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 555–566. [Google Scholar] [CrossRef]
- Kuperman, W.A.; Hodgkiss, W.S.; Song, H.C. Phase conjugation in the ocean: Experimental demonstration of an acoustic time-reversal mirror. J. Acoust. Soc. Am. 1998, 103, 25–40. [Google Scholar] [CrossRef]
- Li, C.X.; Xu, W.; Li, J.L.; Gong, X.Y. Time-reversal detection of multi-dimensional signals in underwater acoustics. IEEE J. Ocean. Eng. 2010, 36, 61–71. [Google Scholar] [CrossRef]
- Walker, S.C.; Roux, P.; Kuperman, W.A. Synchronized time-reversal focusing with application to remote imaging from a distant virtual source array. J. Acoust. Soc. Am. 2009, 125, 3328–3834. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.B.; Zhao, H.F.; Gong, X.Y.; Chapman, N.R. Time-Reversal mirror-virtual source array method for acoustic imaging of proud and buried Targets. IEEE J. Ocean. Eng. 2016, 41, 382–394. [Google Scholar] [CrossRef]
- Pailhasa, Y.; Capusa, C.; Browna, K.E. Broadband MIMO sonar system: A theoretical and experimental approach. In Proceedings of the 3rd International Conference and Exhibition on Underwater Acoustic Measurements, Nafplio, Greece, 21–26 June 2009; pp. 1–6. [Google Scholar]
- Lehmann, N.H.; Fishler, E.; Haimovich, A.M.; Blum, R.S.; Chizhik, D.; Cimini, L.J.; Valenzuela, R.A. Evaluation of transmit diversity in MIMO-radar direction finding. IEEE Trans. Signal Process. 2007, 55, 2215–2224. [Google Scholar] [CrossRef]
- Porter, M.B. Structure of the KRAKEN model. In The KRAKEN Normal Mode Program; SACLANT Undersea Research Centre: La Spezia, Italy, 1991; pp. 67–91. [Google Scholar]
- Pan, X.; Shu, H.; Xu, W.; Chapman, N.R. TR-MIMO detection of a small target in a shallow water waveguide environment. Appl. Acoust. 2014, 79, 16–22. [Google Scholar] [CrossRef]
- Pan, X.; Wang, N.; Zhang, J.F.; Xu, W.; Gong, X.Y. Robust time reversal focusing based on maximin criterion in a waveguide with uncertain water depth. Sci. China Phys. Mech. Astron. 2013, 56, 1822–1832. [Google Scholar] [CrossRef]
- Brienzo, R.K.; Hodgkiss, W.S. Broadband matched-field processing. J. Acoust. Soc. Am. 1993, 94, 2821–2831. [Google Scholar] [CrossRef]
- Kim, S.; Kuperman, W.A.; Hodgkiss, W.S.; Song, H.C.; Edelmann, G.F.; Akal, T. Robust time reversal focusing in the ocean. J. Acoust. Soc. Am. 2003, 114, 145–157. [Google Scholar] [CrossRef] [PubMed]
- Frisk, G.V. Proper Modes for the Pekeris Waveguide. In Ocean and Seedbed Acoustics; Prentice Hall: Englewood Cliffs, NJ, USA, 1994; pp. 148–151. [Google Scholar]
- Kay, S.M. Maximum Likelihood Estimation. In Fundamentals of Statistical Signal Processing: Estiamtion Theory; Prentice Hall: Englewood Cliffs, NJ, USA, 1993; pp. 157–191. [Google Scholar]
- Friedlander, B.; Zeira, A. Detection of broadband signals in frequency and time dispersive channels. IEEE Trans. Signal Process. 1996, 44, 127–145. [Google Scholar] [CrossRef]
- Scharf, L.L. Matched Subspace Filters. In Statistical Signal Processing: Detection, Estimation and Time Series Analysis; Addison Wesley: Reading, MA, USA, 1991; pp. 145–146. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Thickness (m) | Density (g/cm) | Speed (m/s) | Absorption (dB/) |
|---|---|---|---|---|
| Water | 20 | 1.0 | 1460 | 0.0 |
| Sediment | 5 | 1.8 | 1700 | 0.5 |
| Bottom | ∞ | 3.0 | 3000 | 2.0 |
| Frequency (kHz) | R (m) | z (m) |
|---|---|---|
| 7 | 1.5 | 0.2 |
| 9 | 1.17 | 0.16 |
| 6–7.5 | 1.54 | 0.21 |
| 8–9.5 | 1.12 | 0.16 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, X.; Jiang, J.; Li, S.; Ding, Z.; Pan, C.; Gong, X. Coherent and Noncoherent Joint Processing of Sonar for Detection of Small Targets in Shallow Water. Sensors 2018, 18, 1154. https://doi.org/10.3390/s18041154
Pan X, Jiang J, Li S, Ding Z, Pan C, Gong X. Coherent and Noncoherent Joint Processing of Sonar for Detection of Small Targets in Shallow Water. Sensors. 2018; 18(4):1154. https://doi.org/10.3390/s18041154
Chicago/Turabian StylePan, Xiang, Jingning Jiang, Si Li, Zhenping Ding, Chen Pan, and Xianyi Gong. 2018. "Coherent and Noncoherent Joint Processing of Sonar for Detection of Small Targets in Shallow Water" Sensors 18, no. 4: 1154. https://doi.org/10.3390/s18041154