Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal

Abstract
:1. Introduction
2. CSF-CFSK/PSK Signal Model and Parameter Design
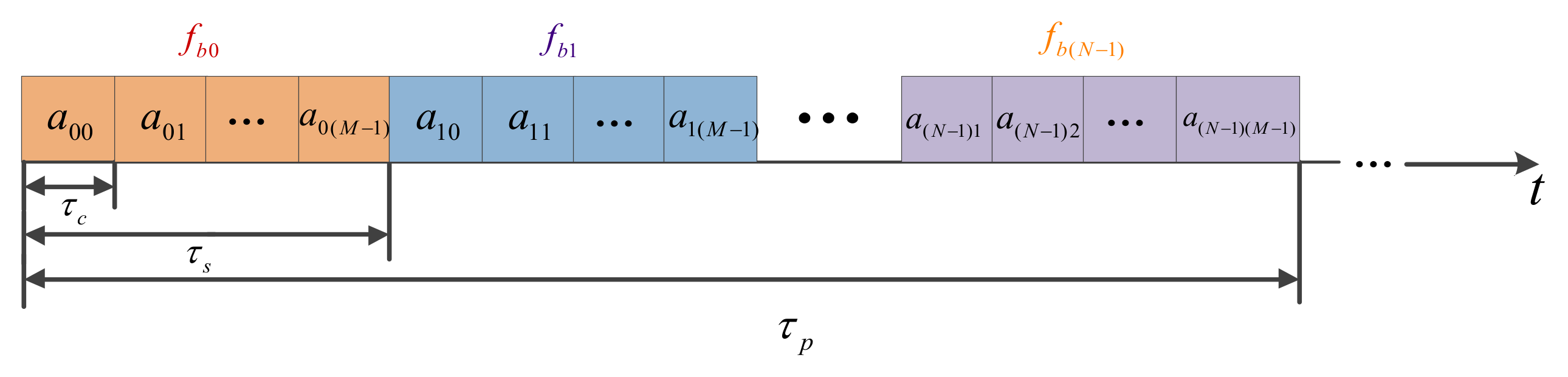
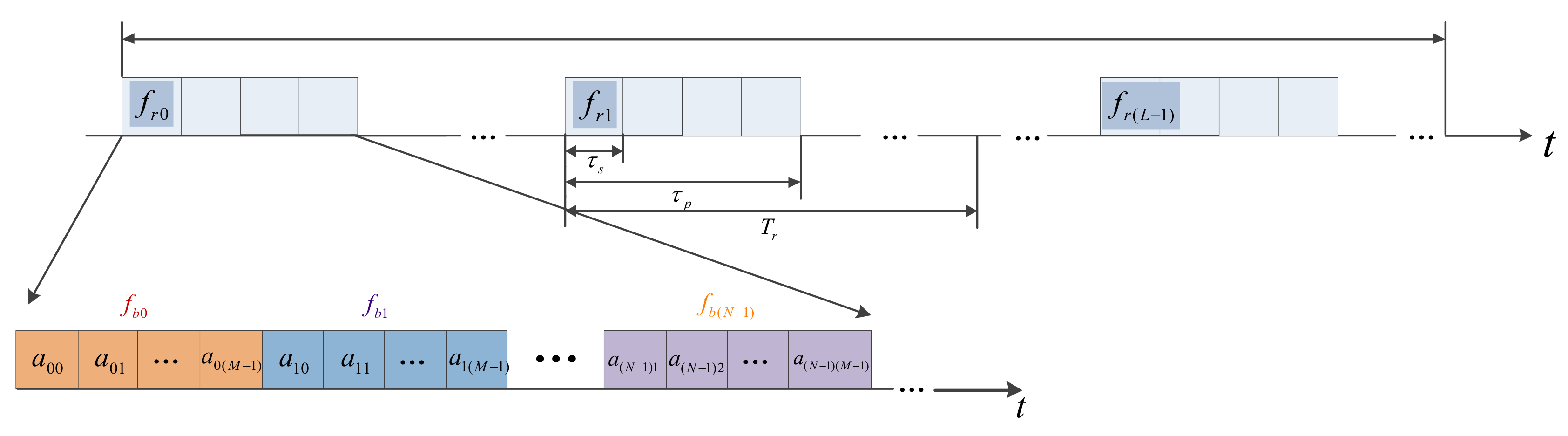
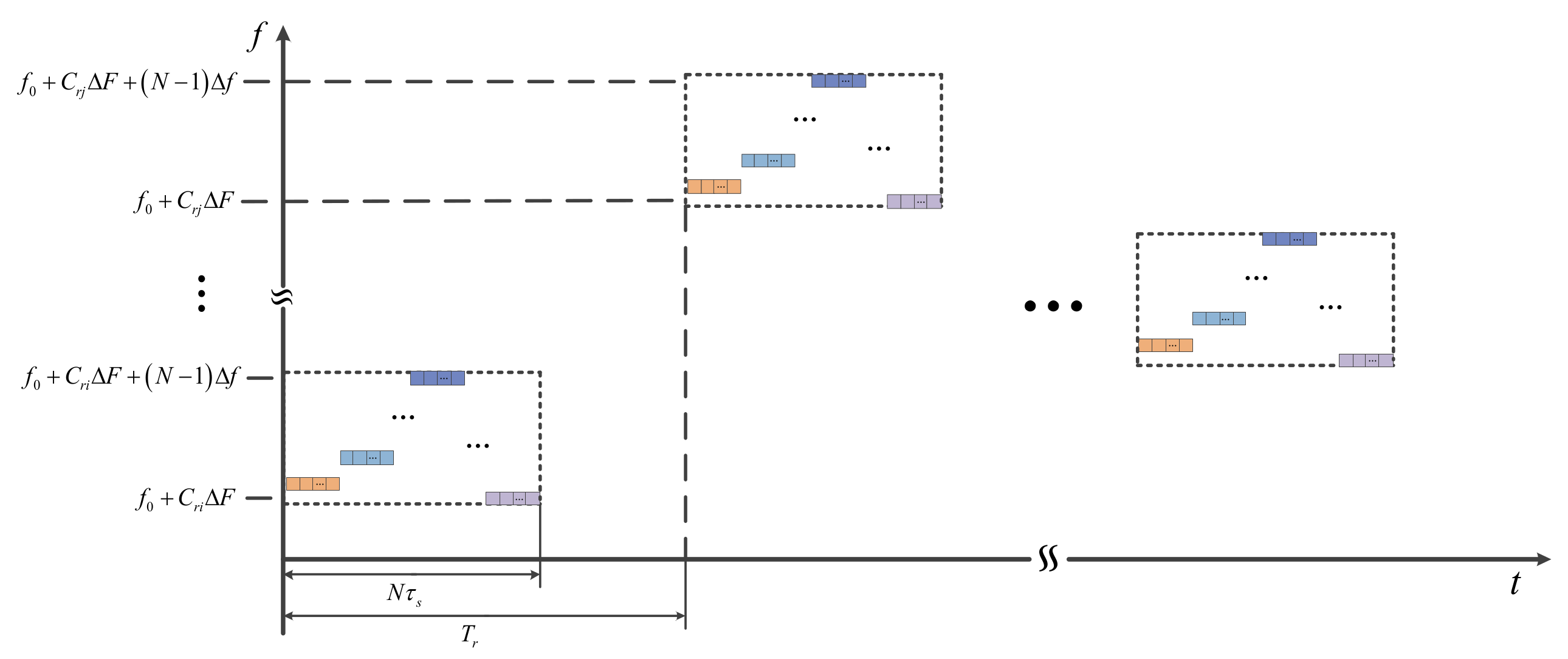
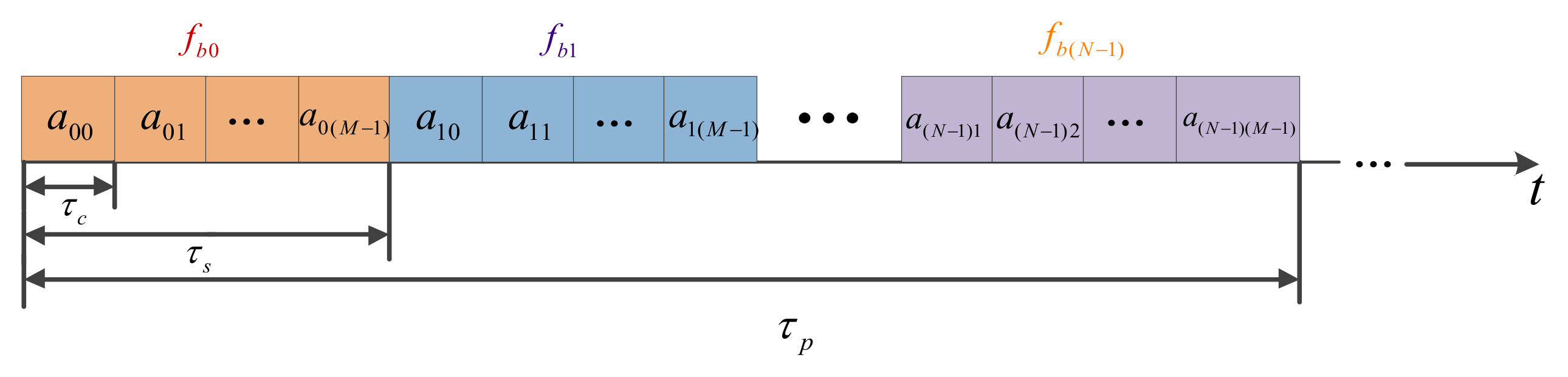
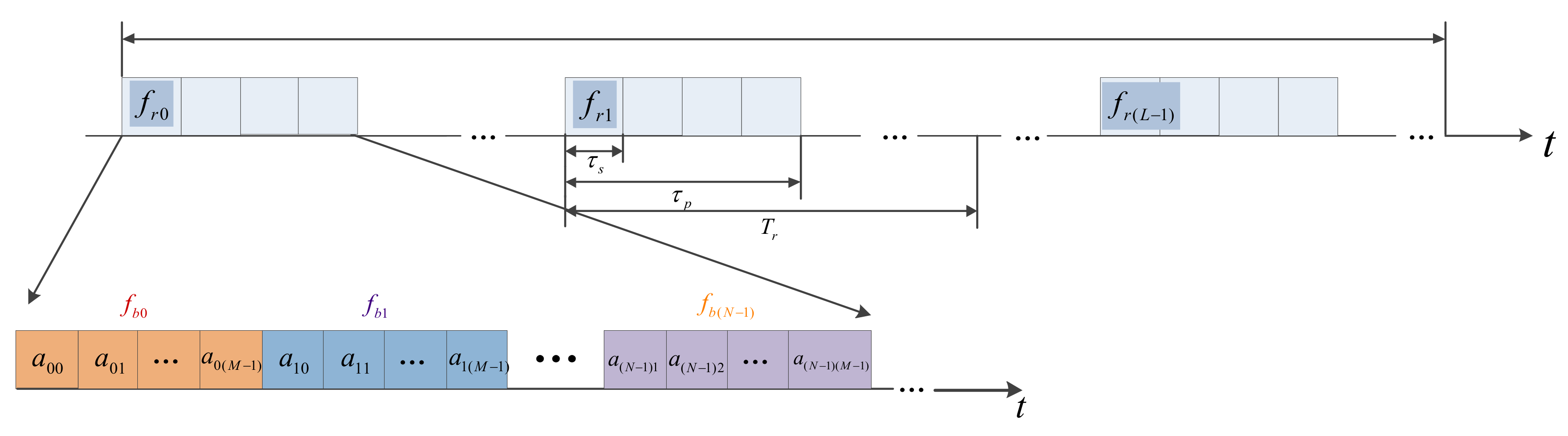
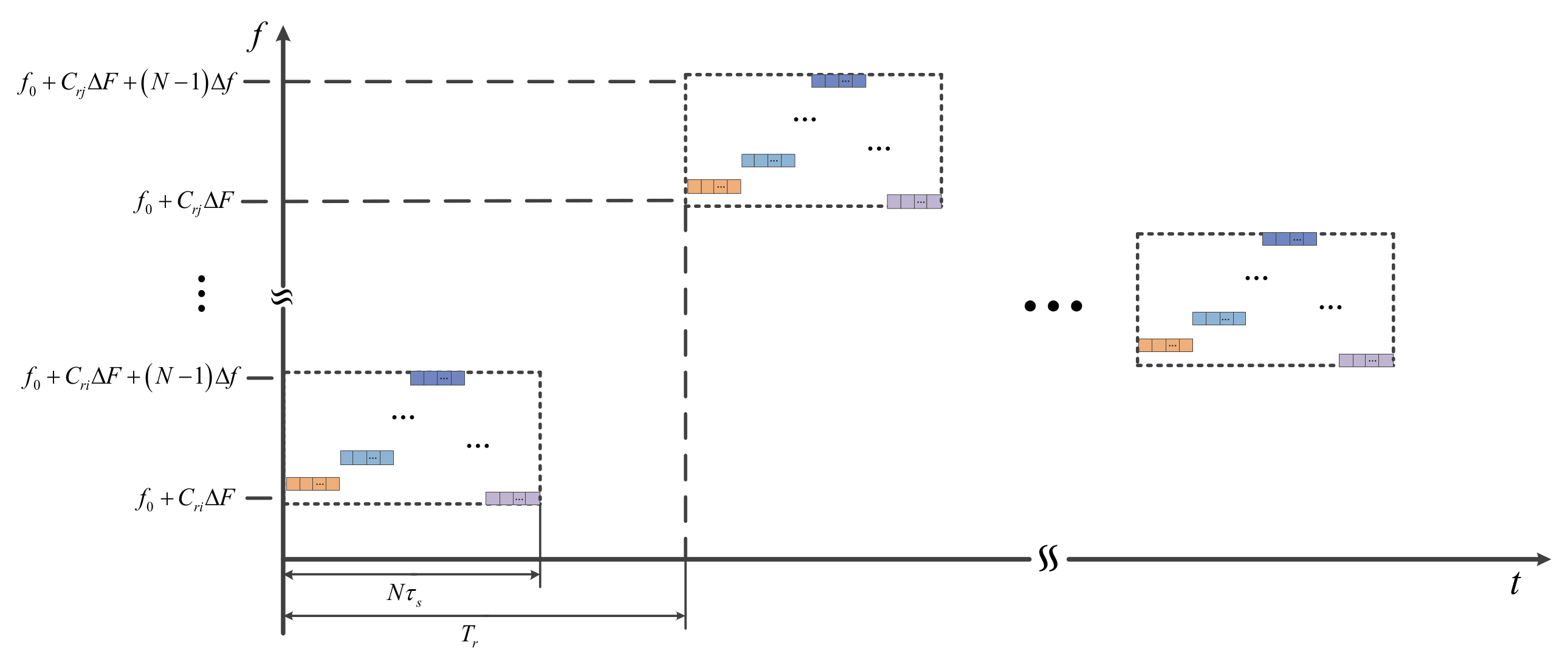
2.1. Signal Model
2.2. Parameter Design
2.2.1. FSK/PSK Parameter Design
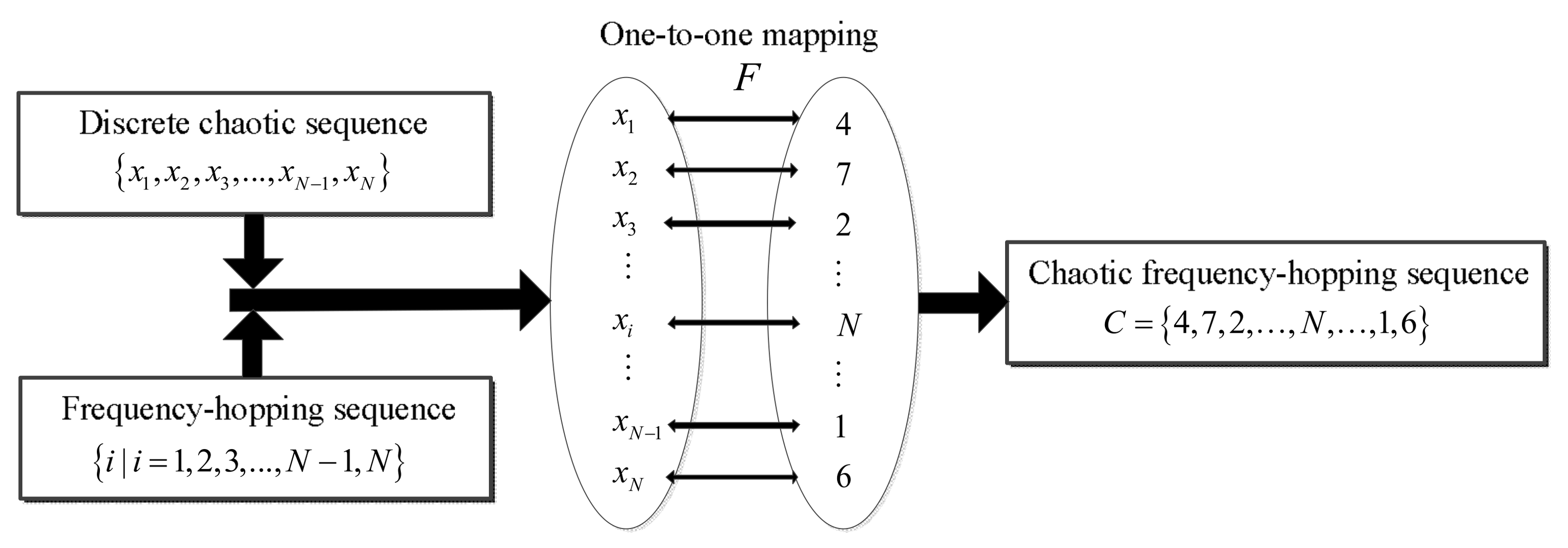
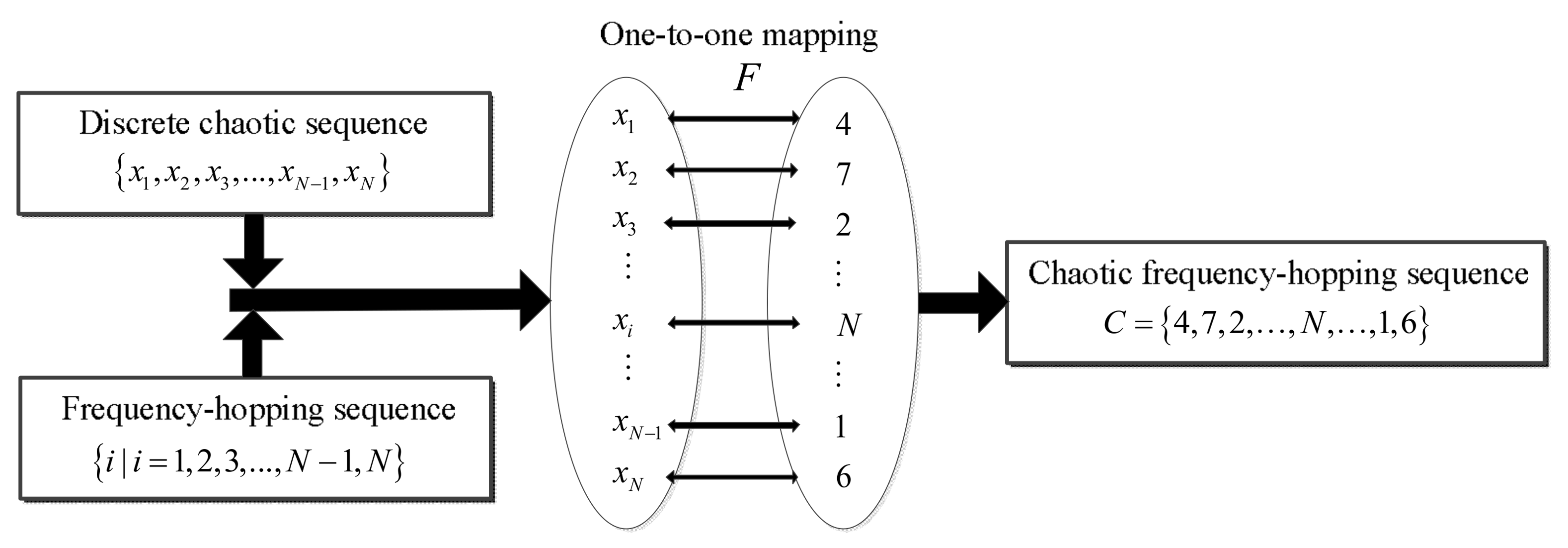
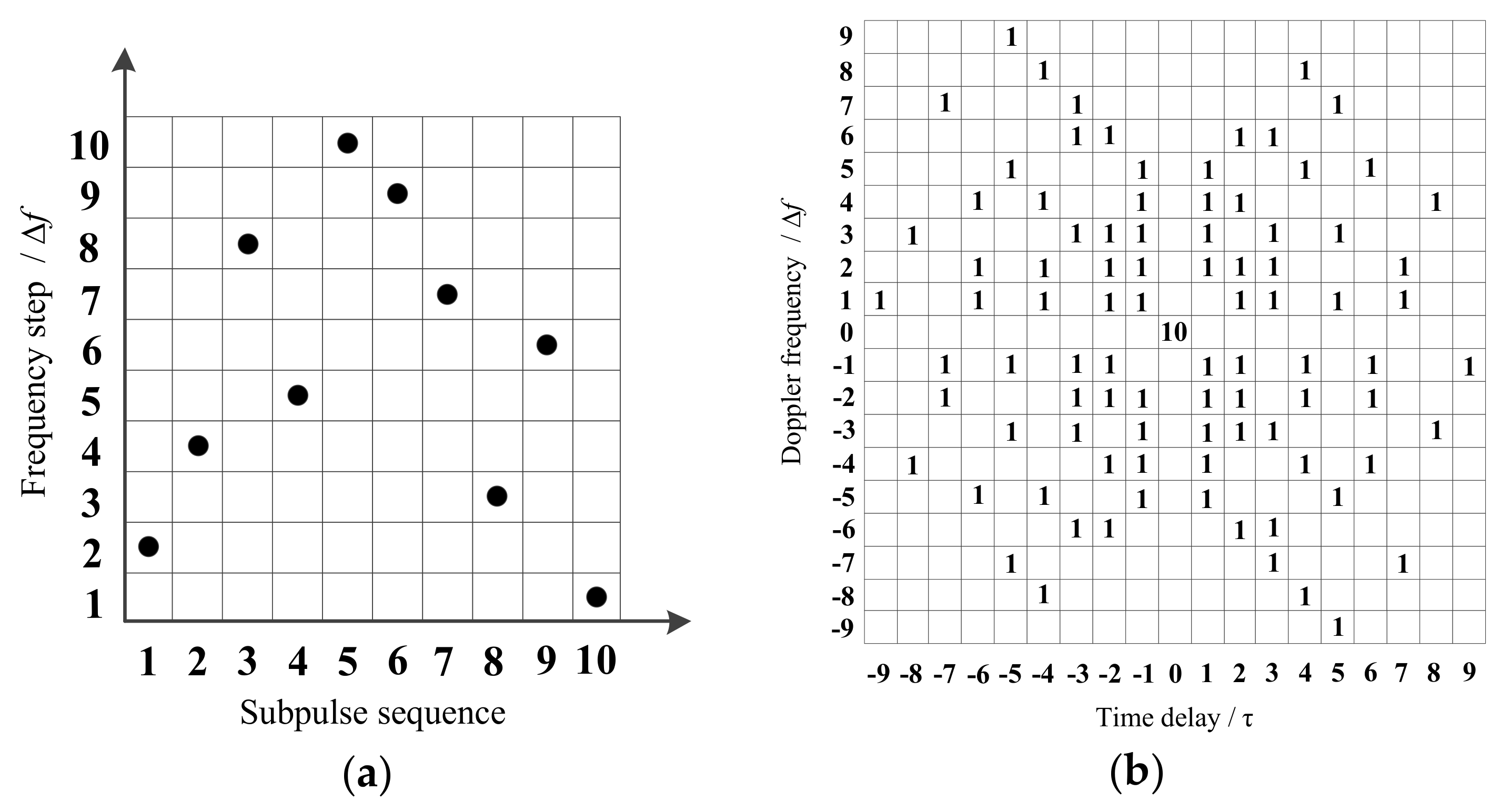
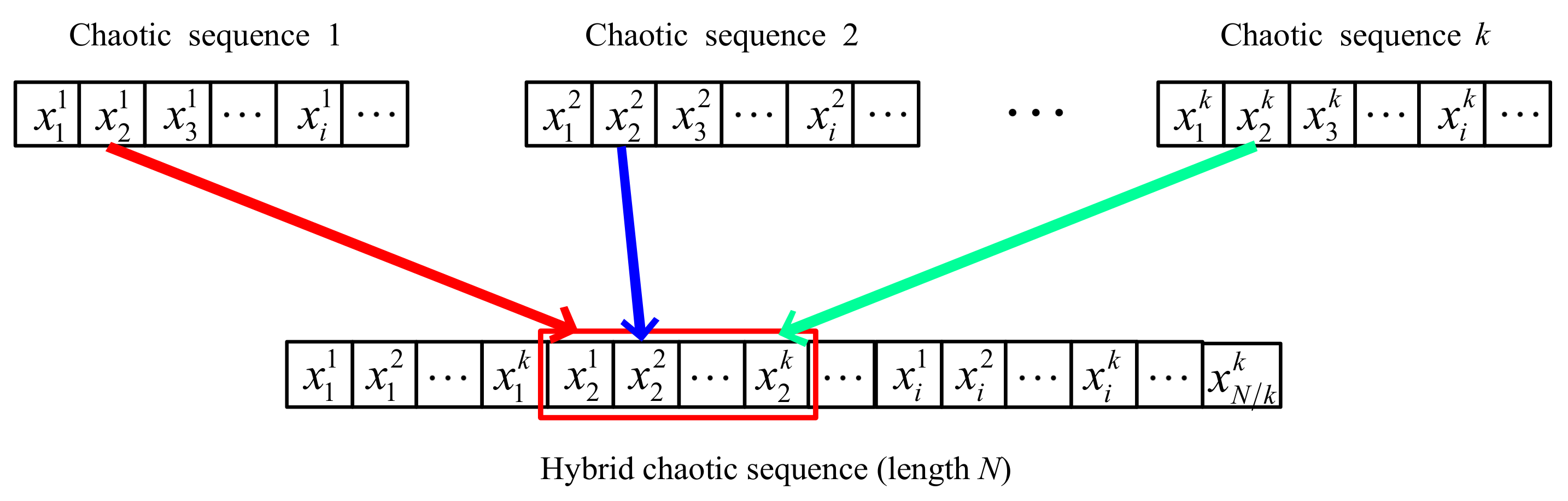
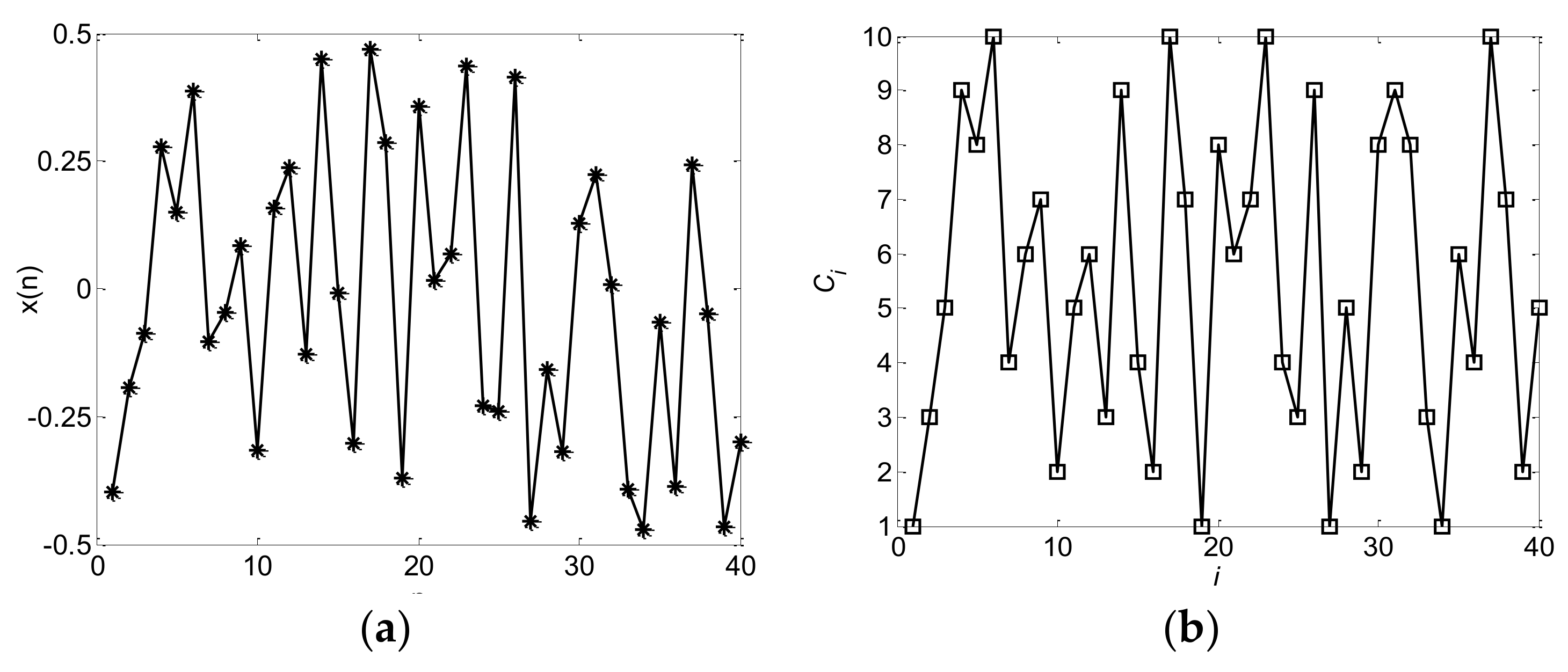
2.2.2. Chaotic Frequency-Hopping Sequence Design
- Identify the initial value of the chaos mapping and iteration number and obtain the chaotic sequence ;
- Sort the chaotic sequence from small to large to form the new sequence ;
- Find each element decimal position number of the chaotic sequence in the new ordered sequence . Replace the chaotic sequence corresponding element with these decimal location numbers and obtain the decimal number sequence collection ;
- The collection is the frequency-hopping sequence obtained using the chaotic sequence .
3. Ambiguity Function and Resolution Analysis
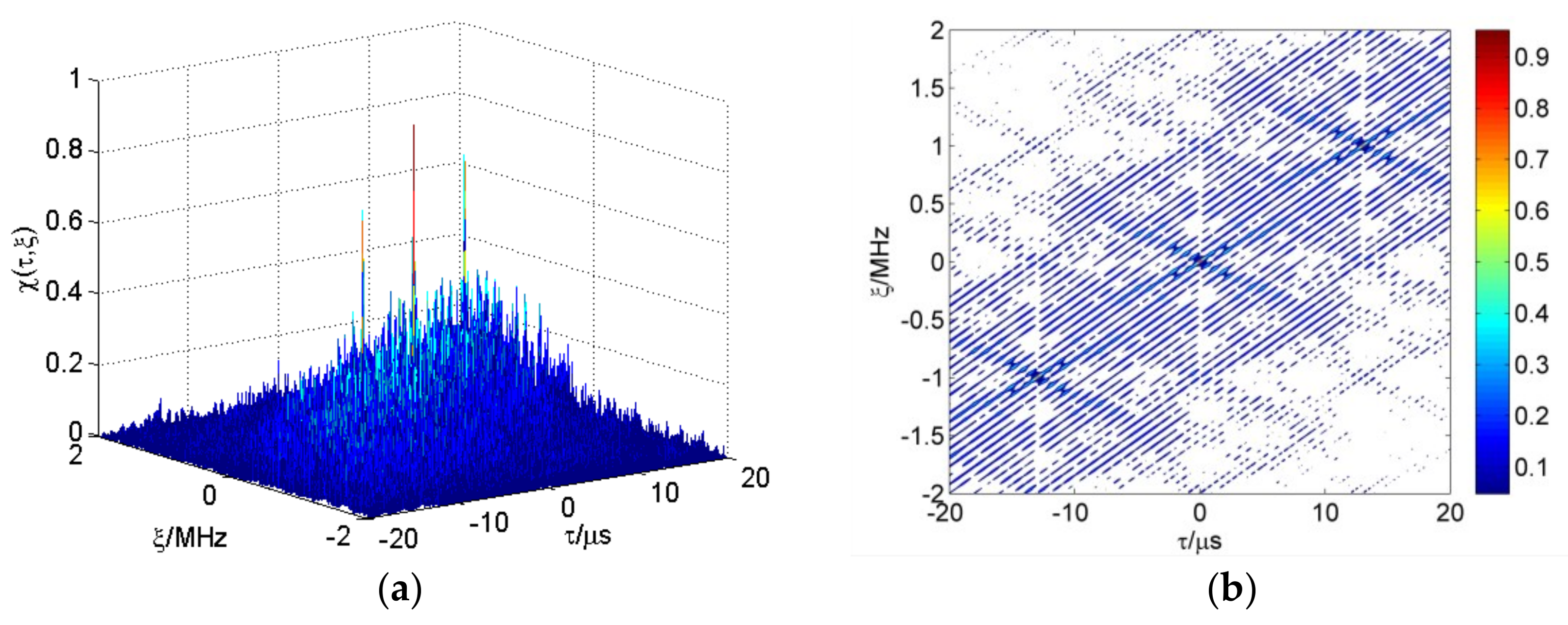
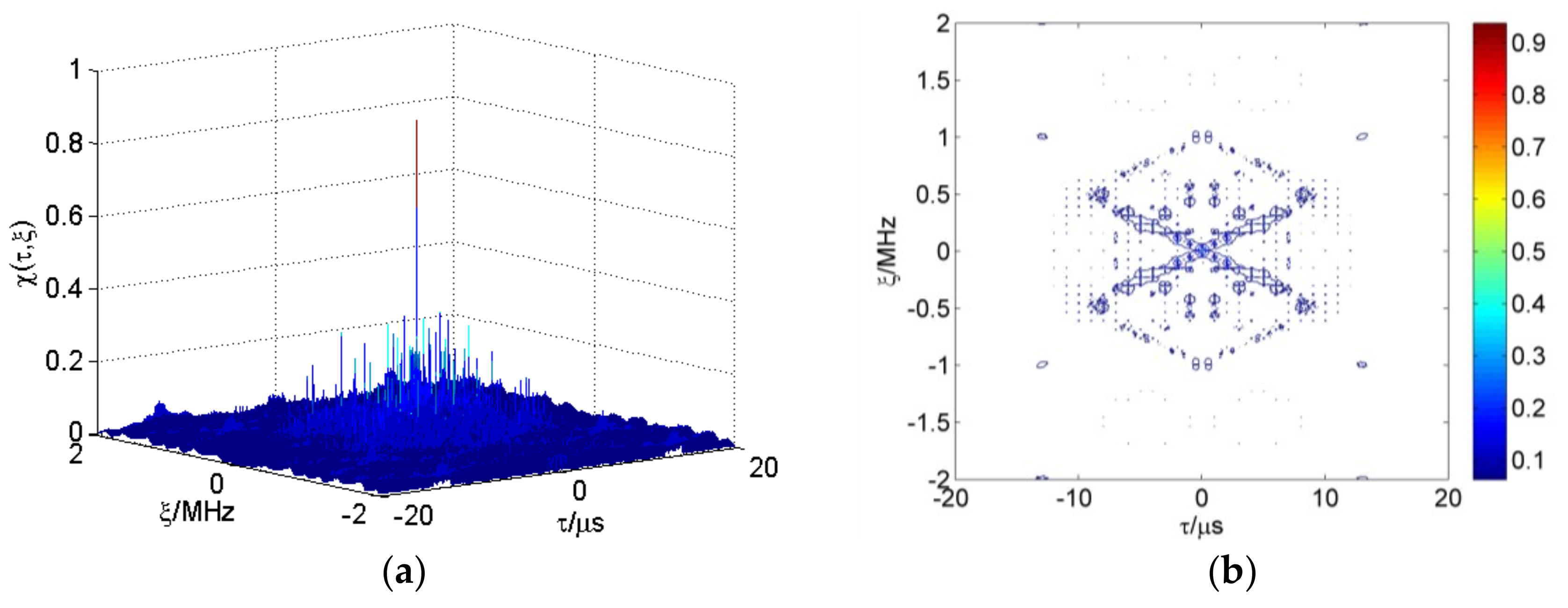
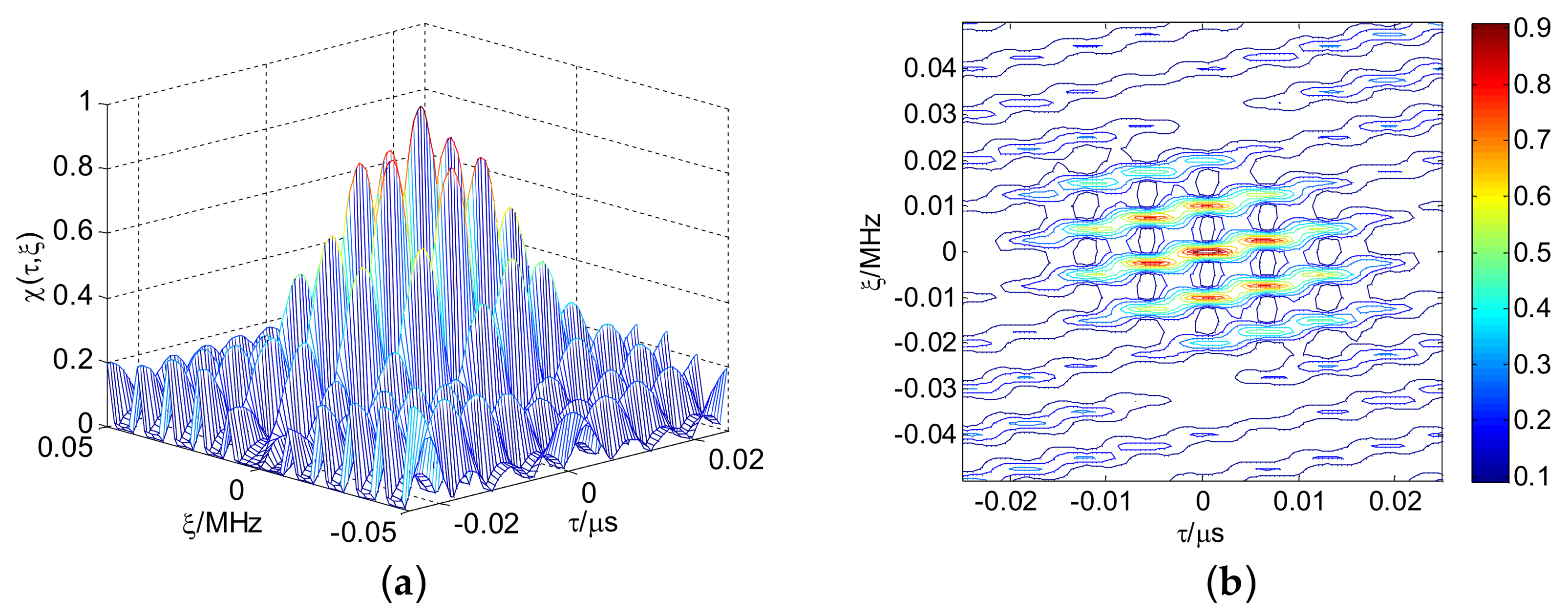
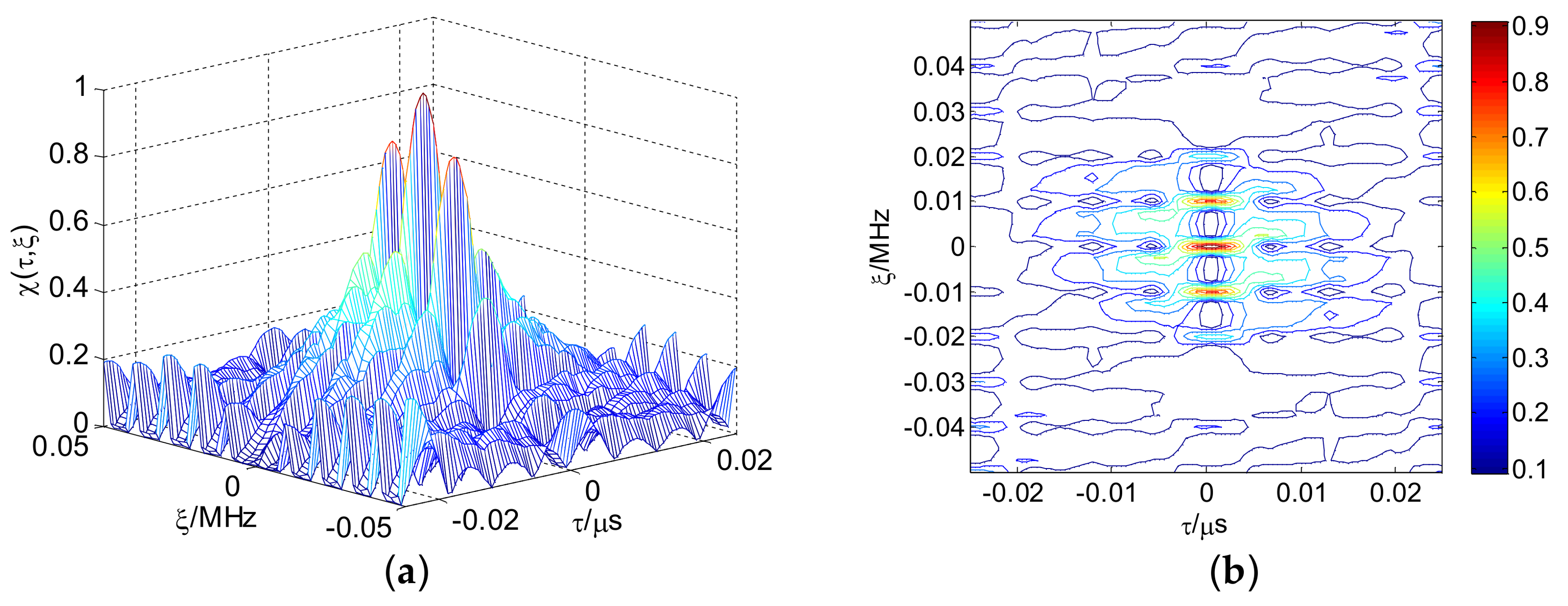
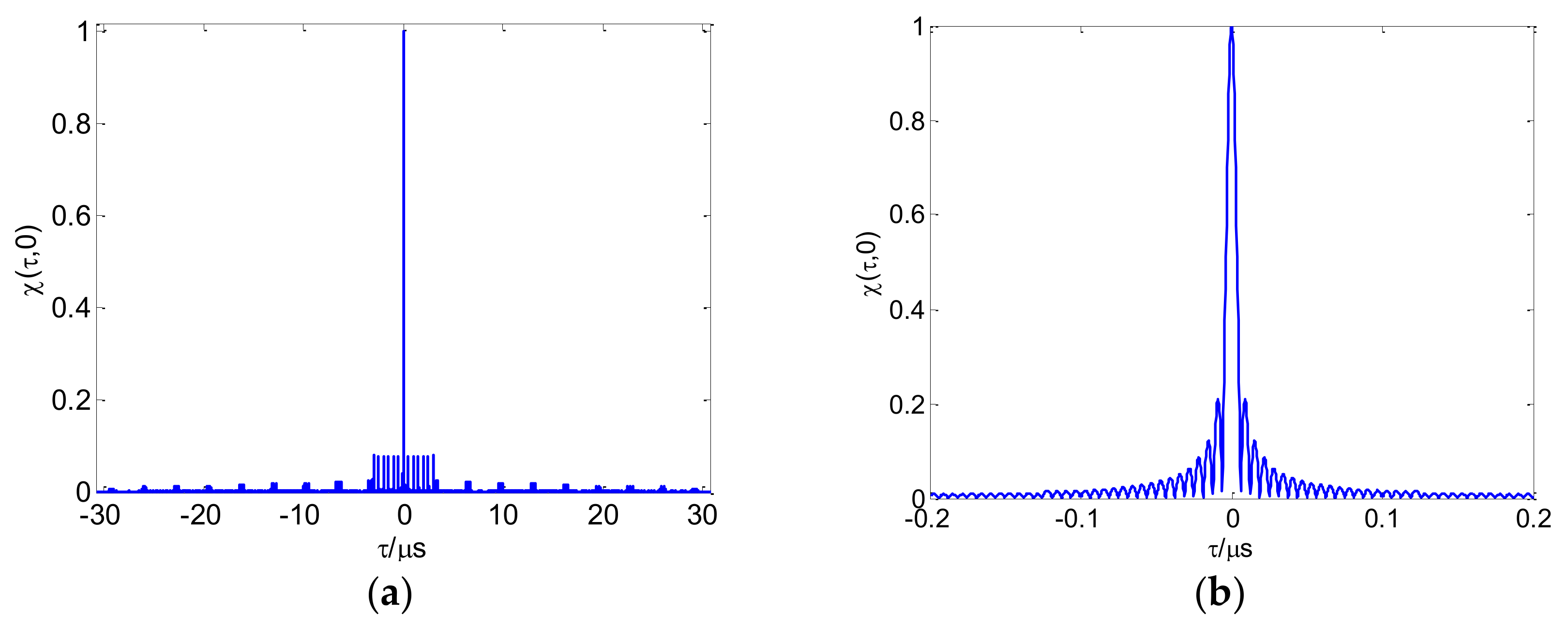
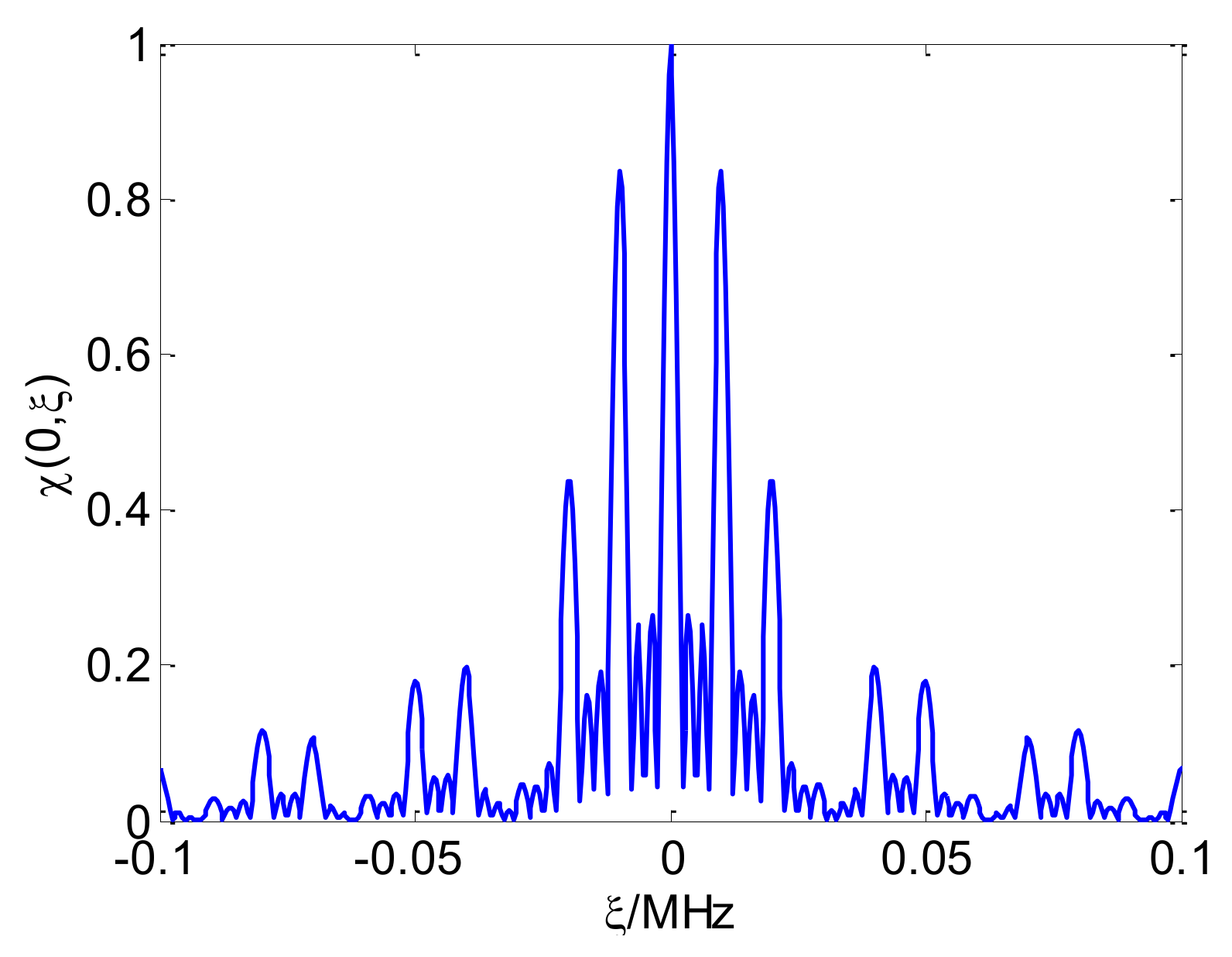
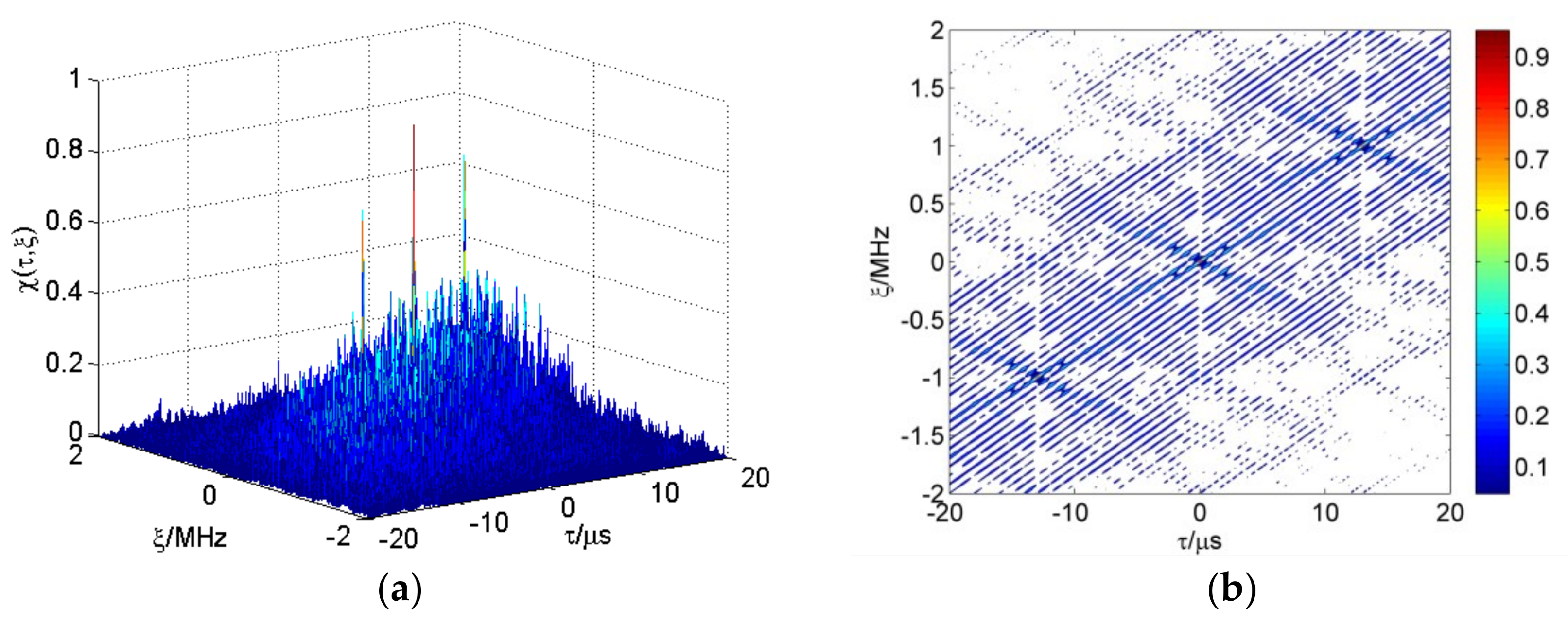
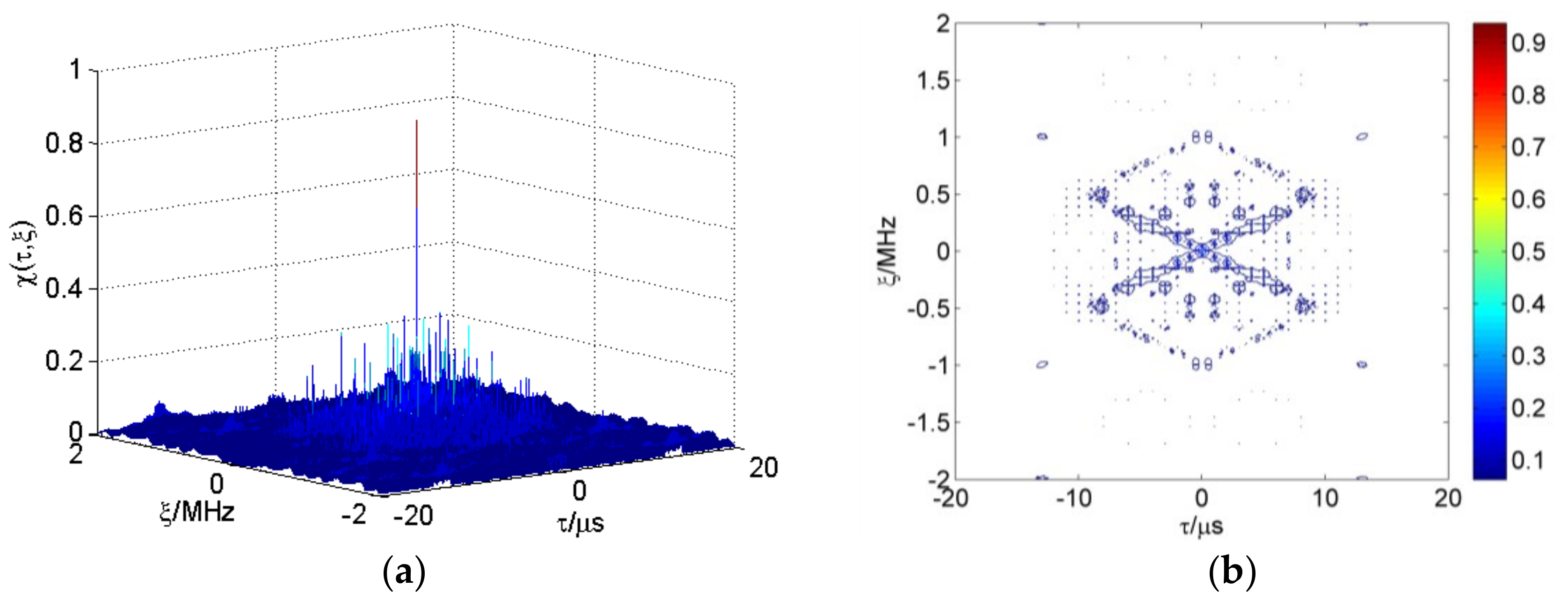
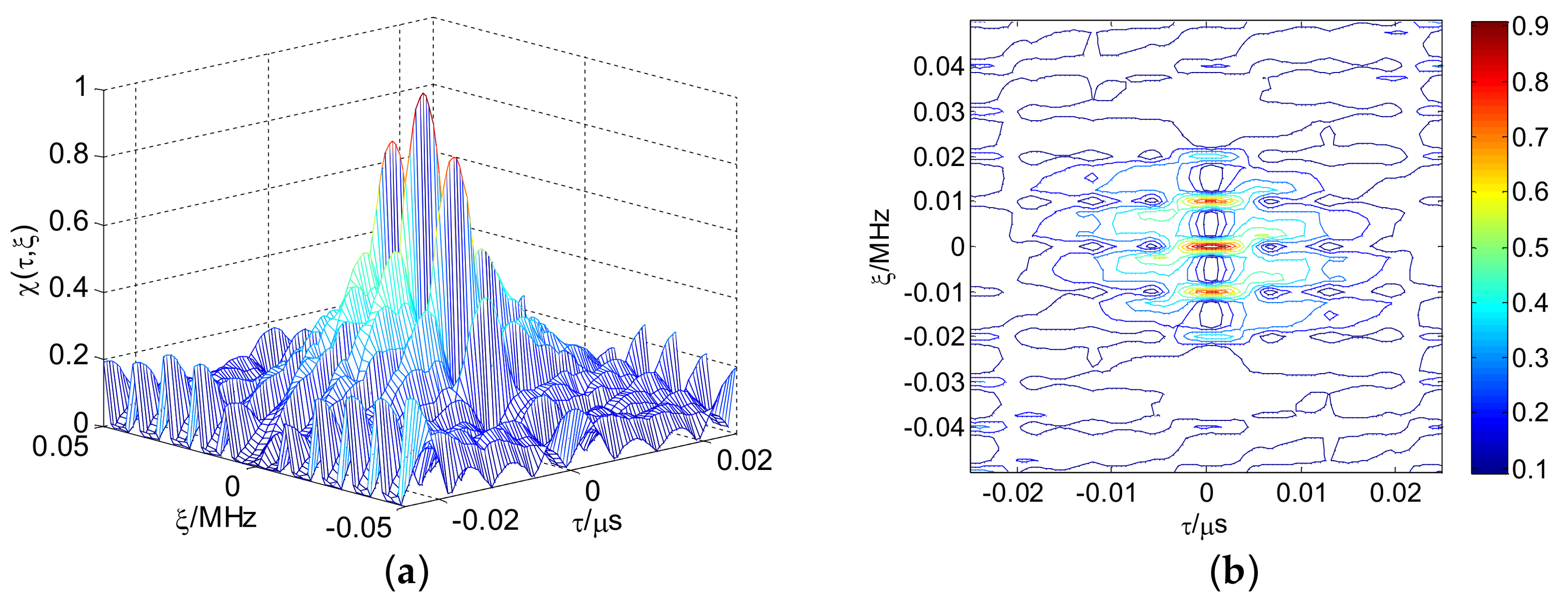
3.1. CSF-CFSK/PSK Ambiguity Function
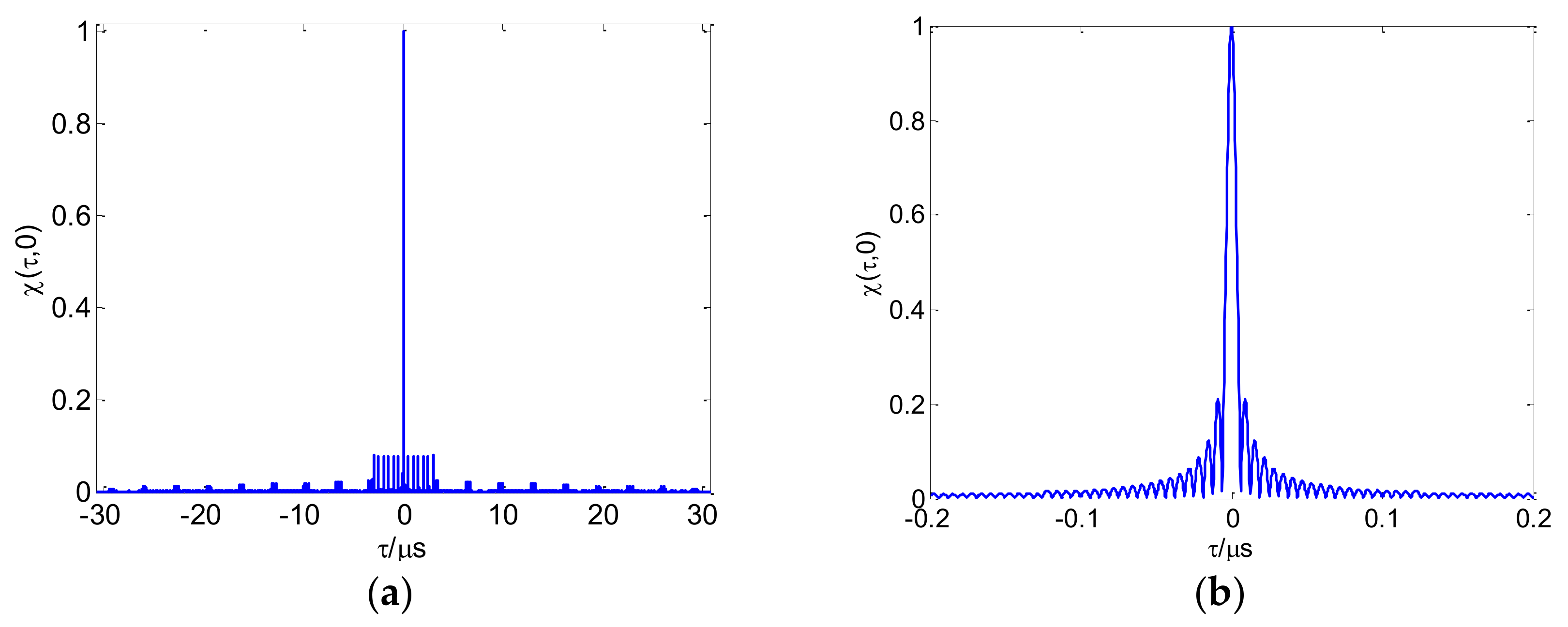
3.2. CSF-CFSK/PSK Resolution Analysis
3.2.1. CFSK/PSK Resolution
3.2.2. CSF-CFSK/PSK Resolution
3.3. LPI Performance Analysis
4. CSF-CFSK/PSK Signal Processing Method
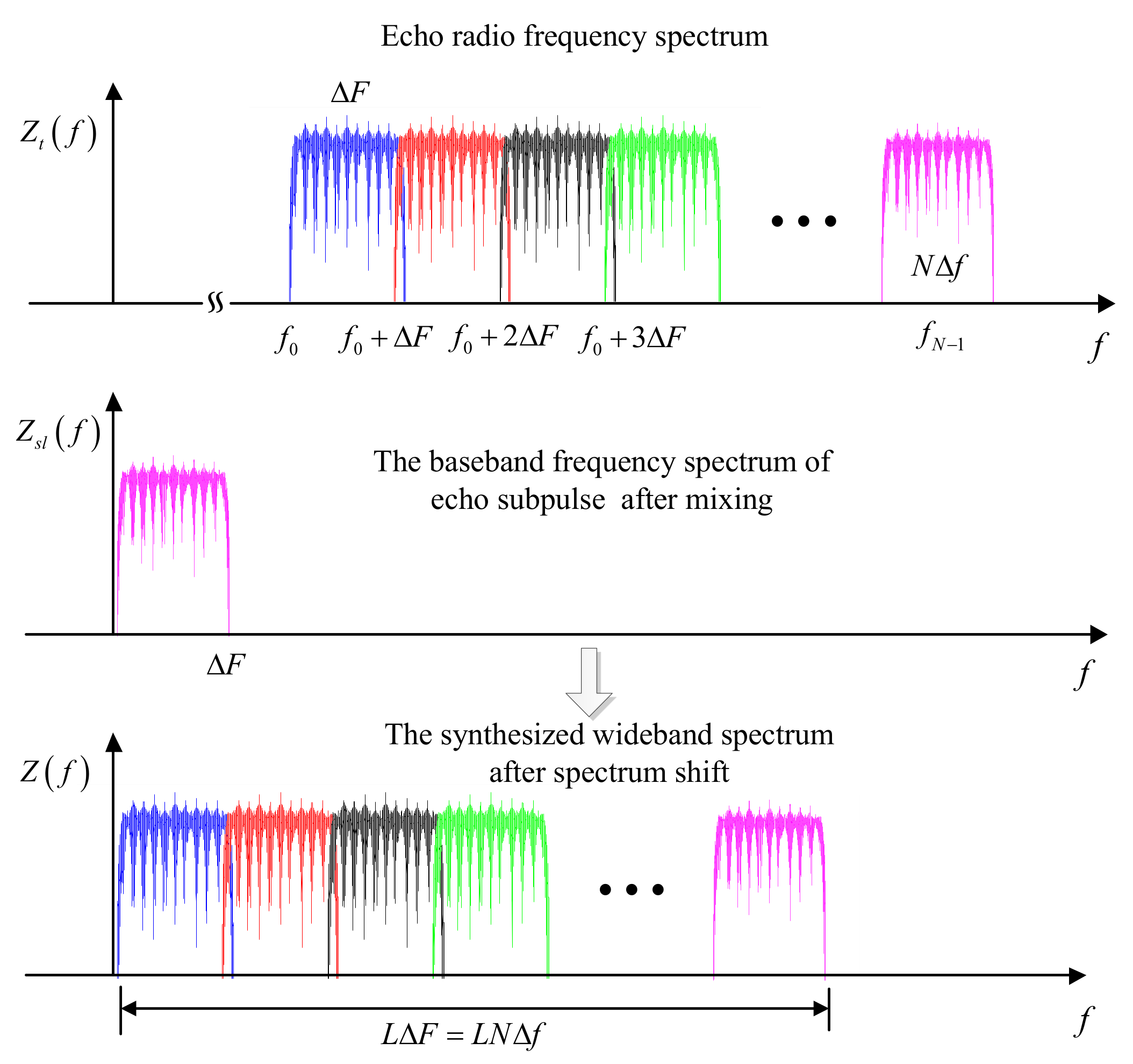
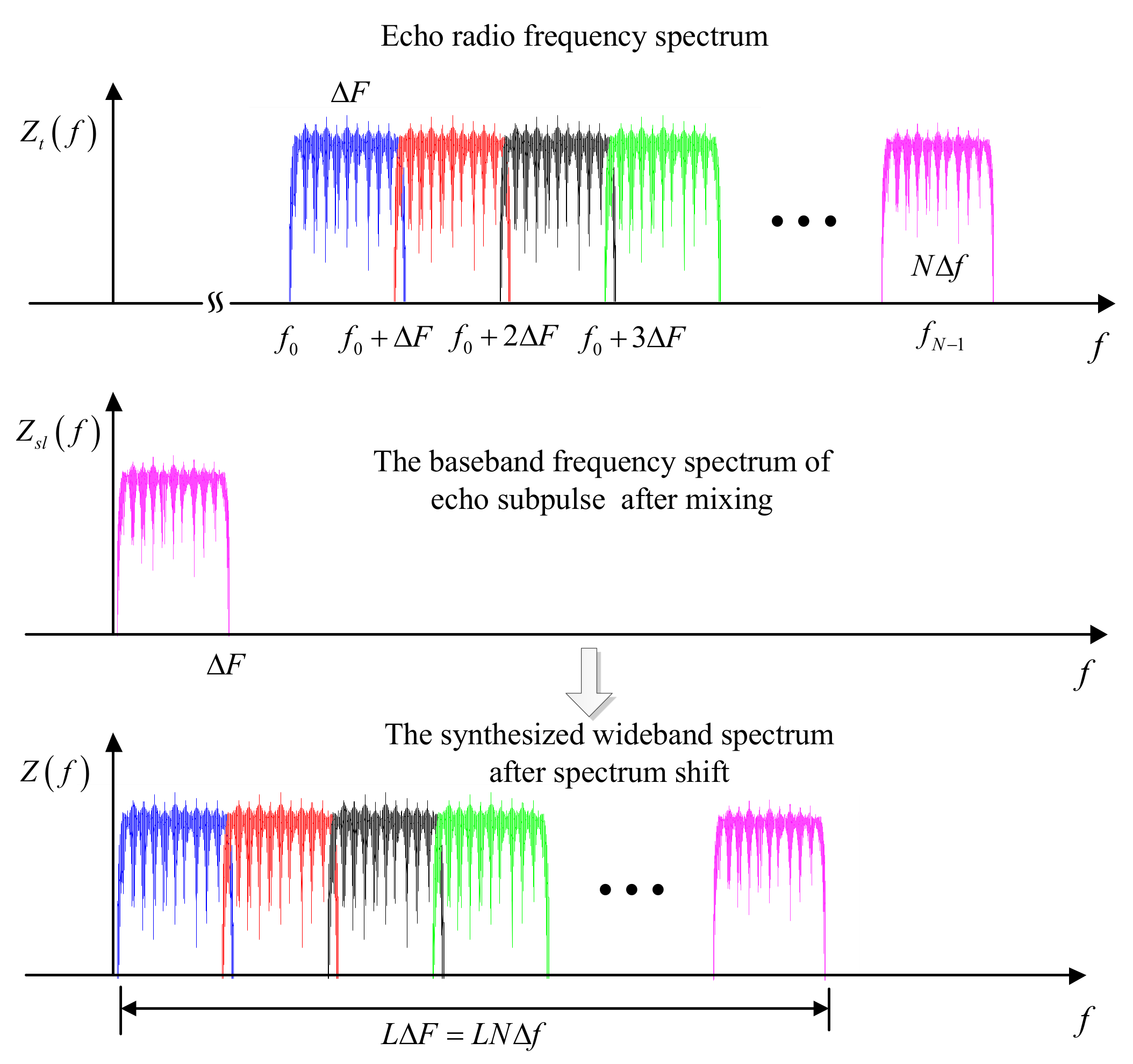
4.1. Echo Model
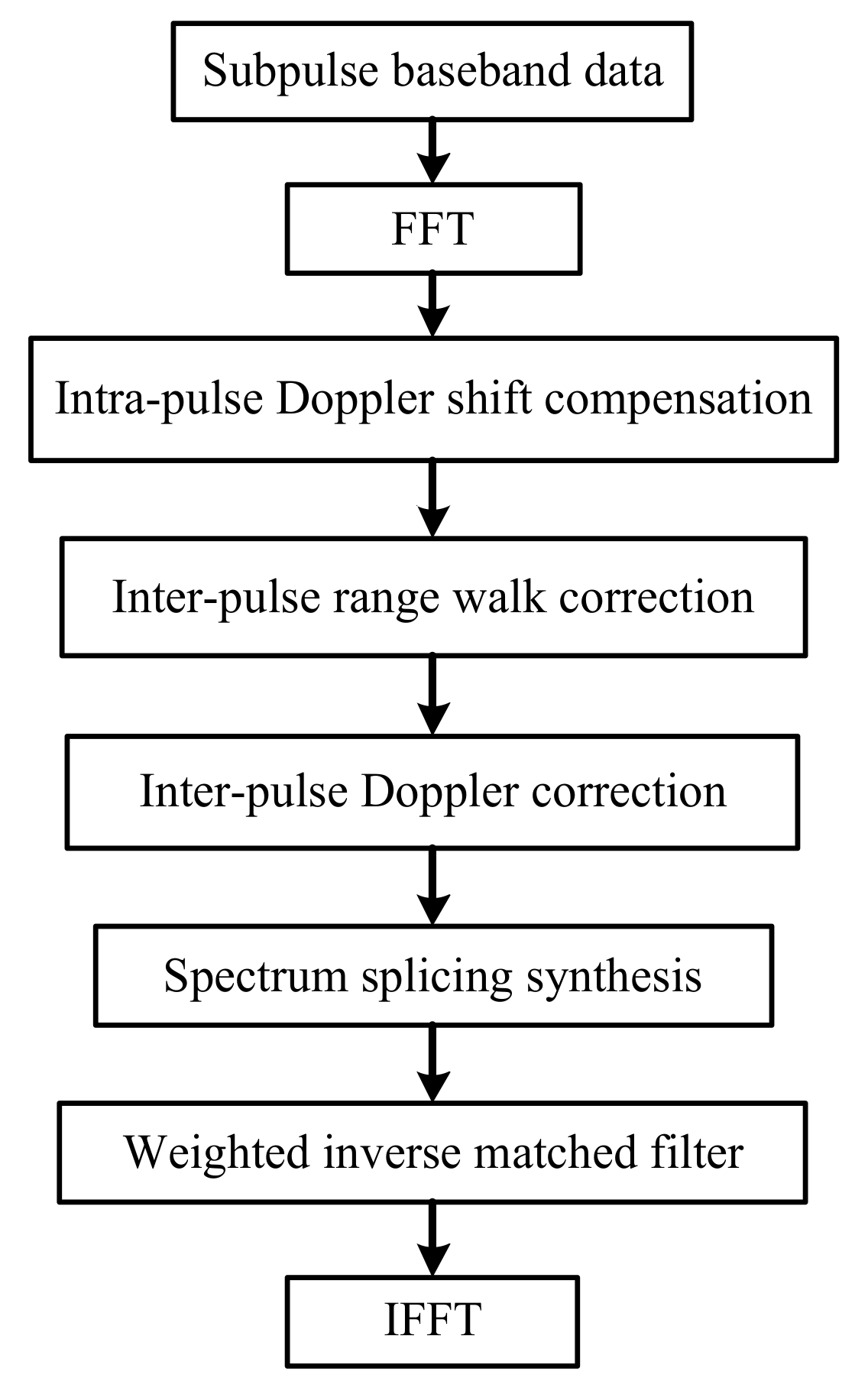
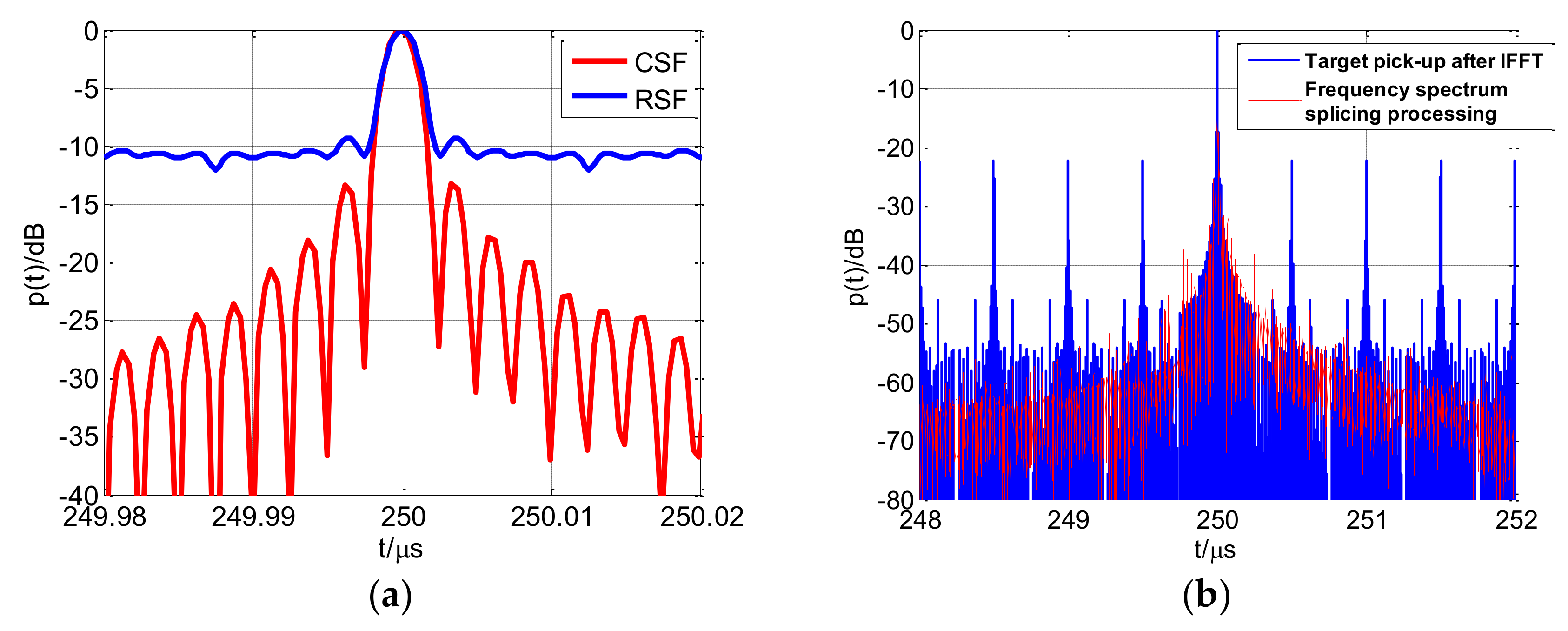
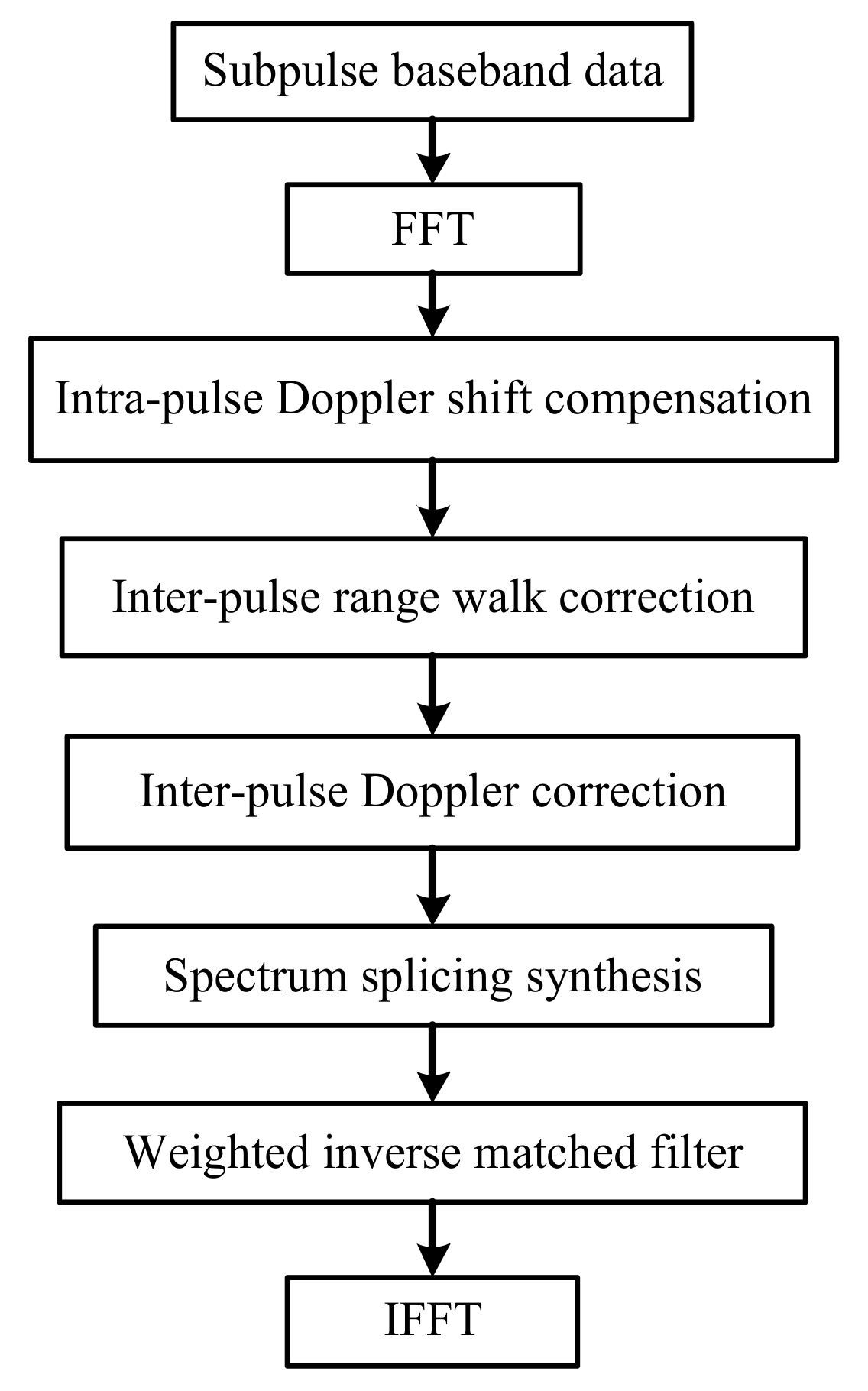
4.2. Synthesized Wideband Processing Based on Frequency Spectrum Splicing
- Obtain the subpulse baseband data and take the fast Fourier transformation (FFT) in time domain;
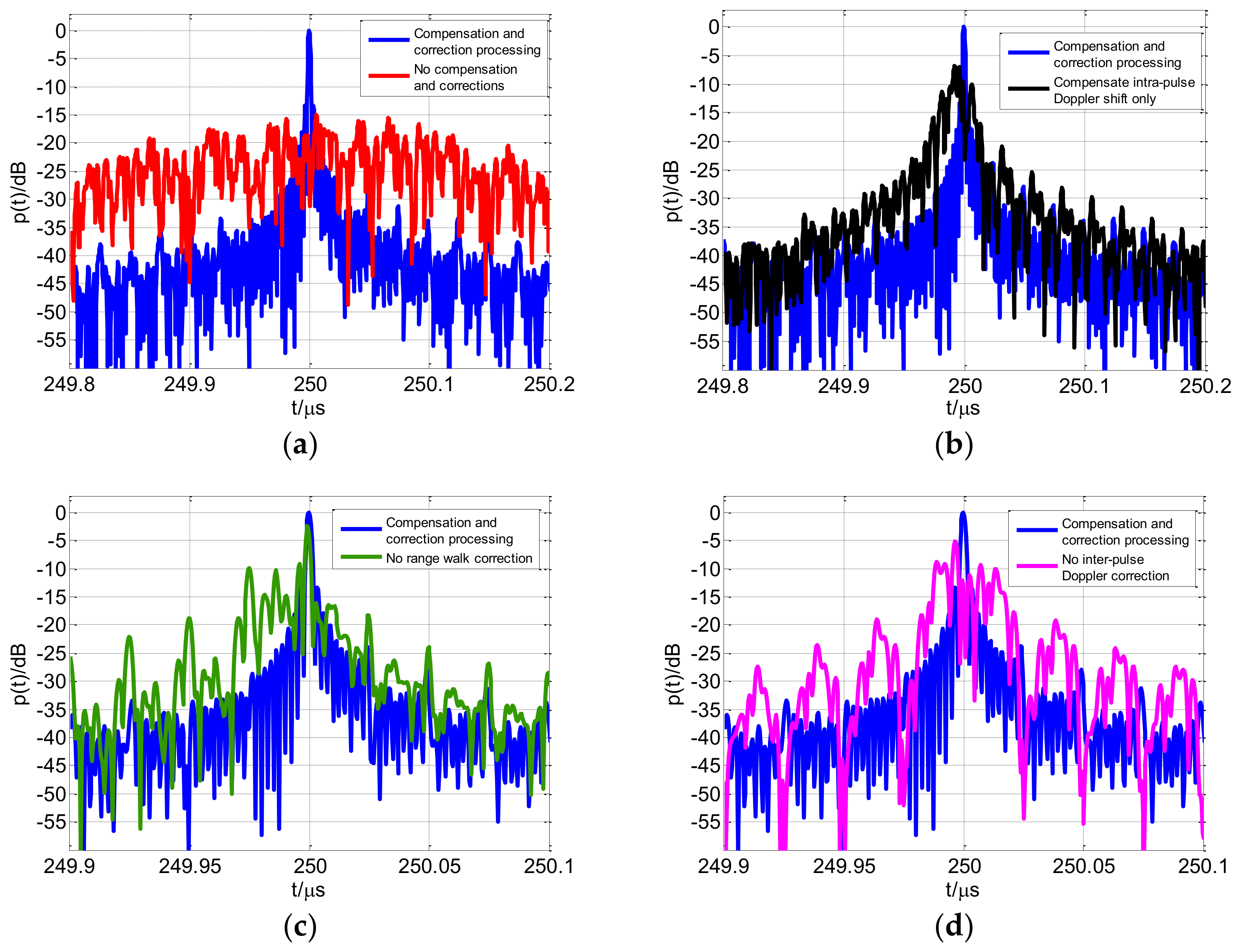
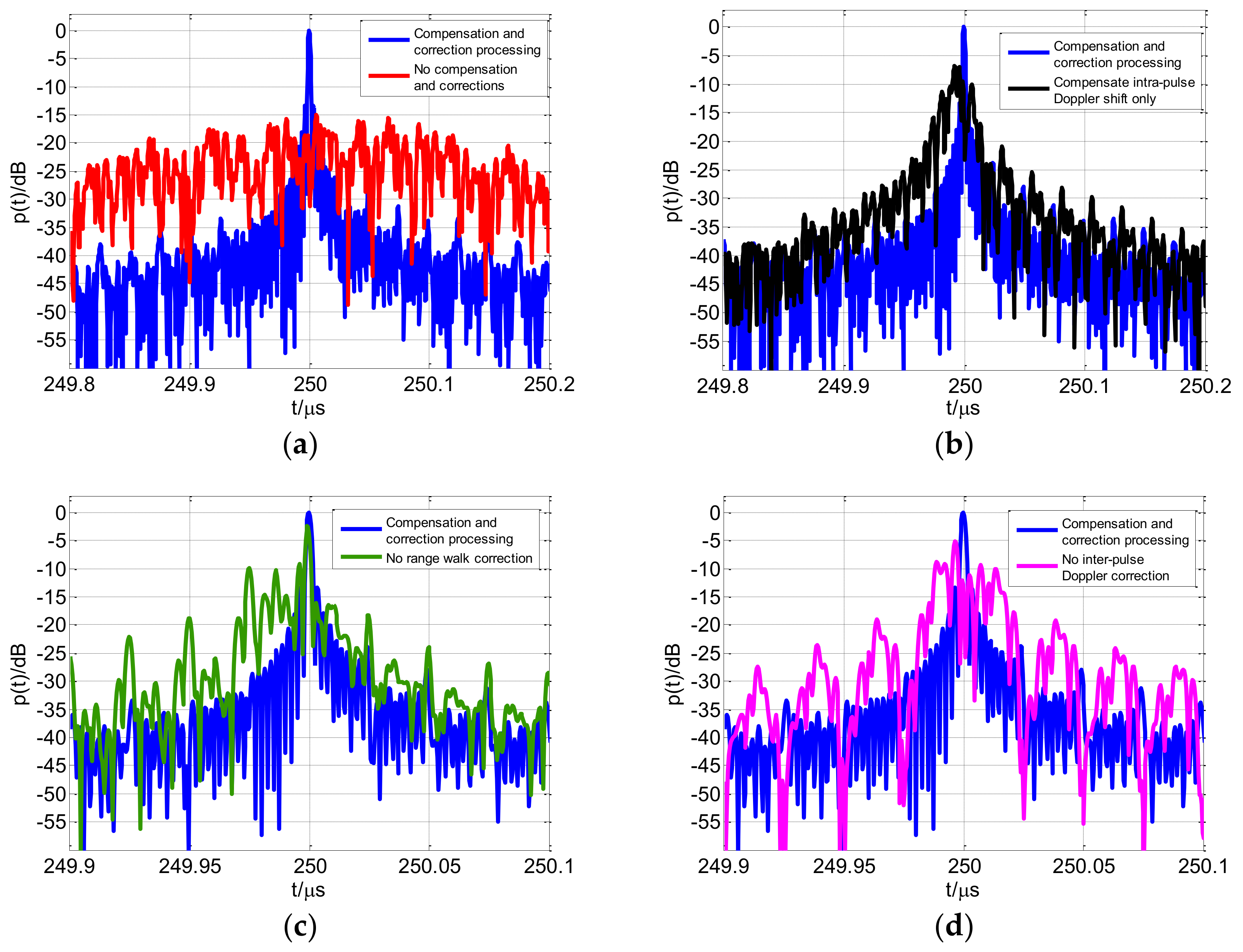
- Compensate the intra-pulse Doppler frequency shift ;
- Correct the inter-pulse range walk phase term and the inter-pulse Doppler phase term ;
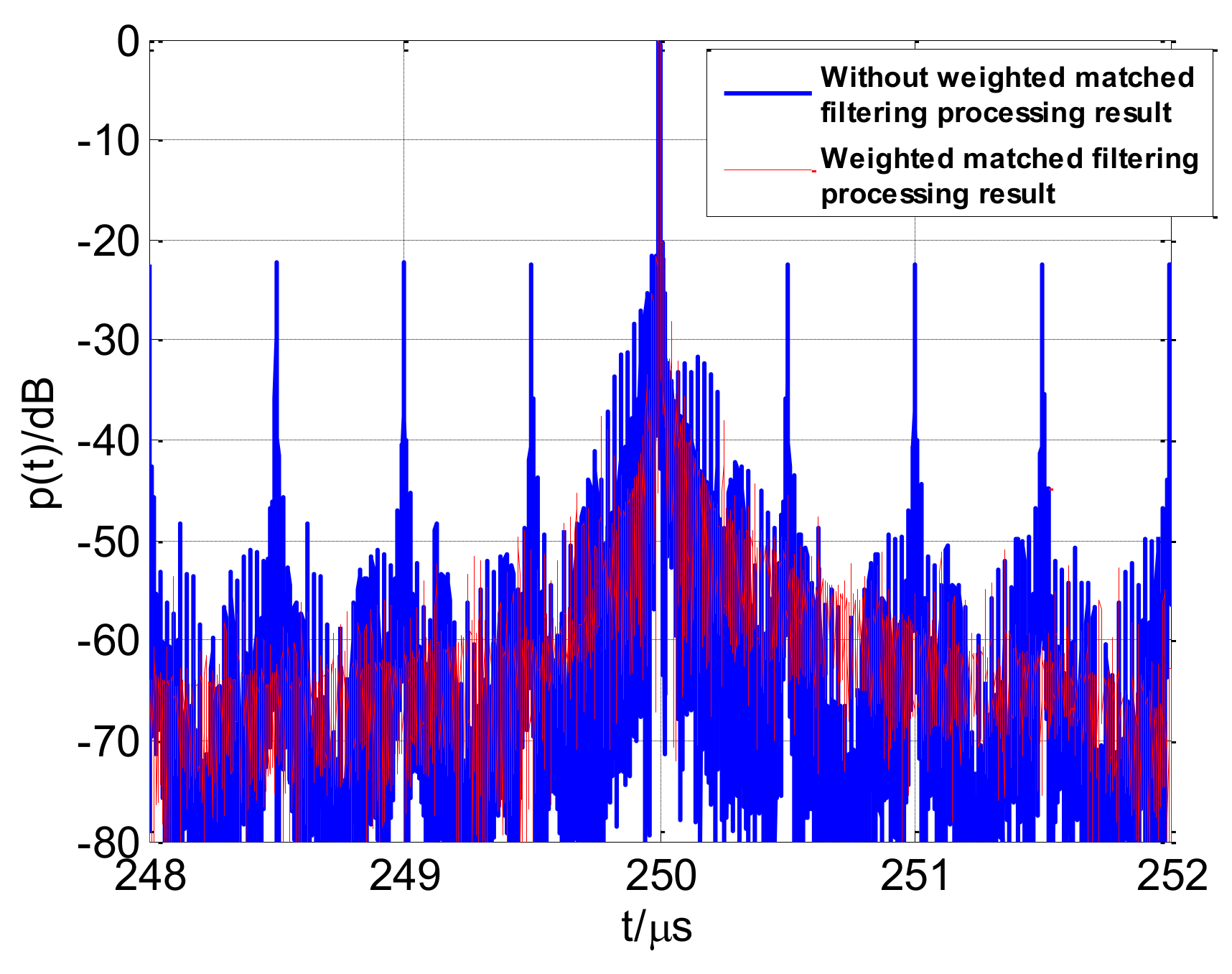
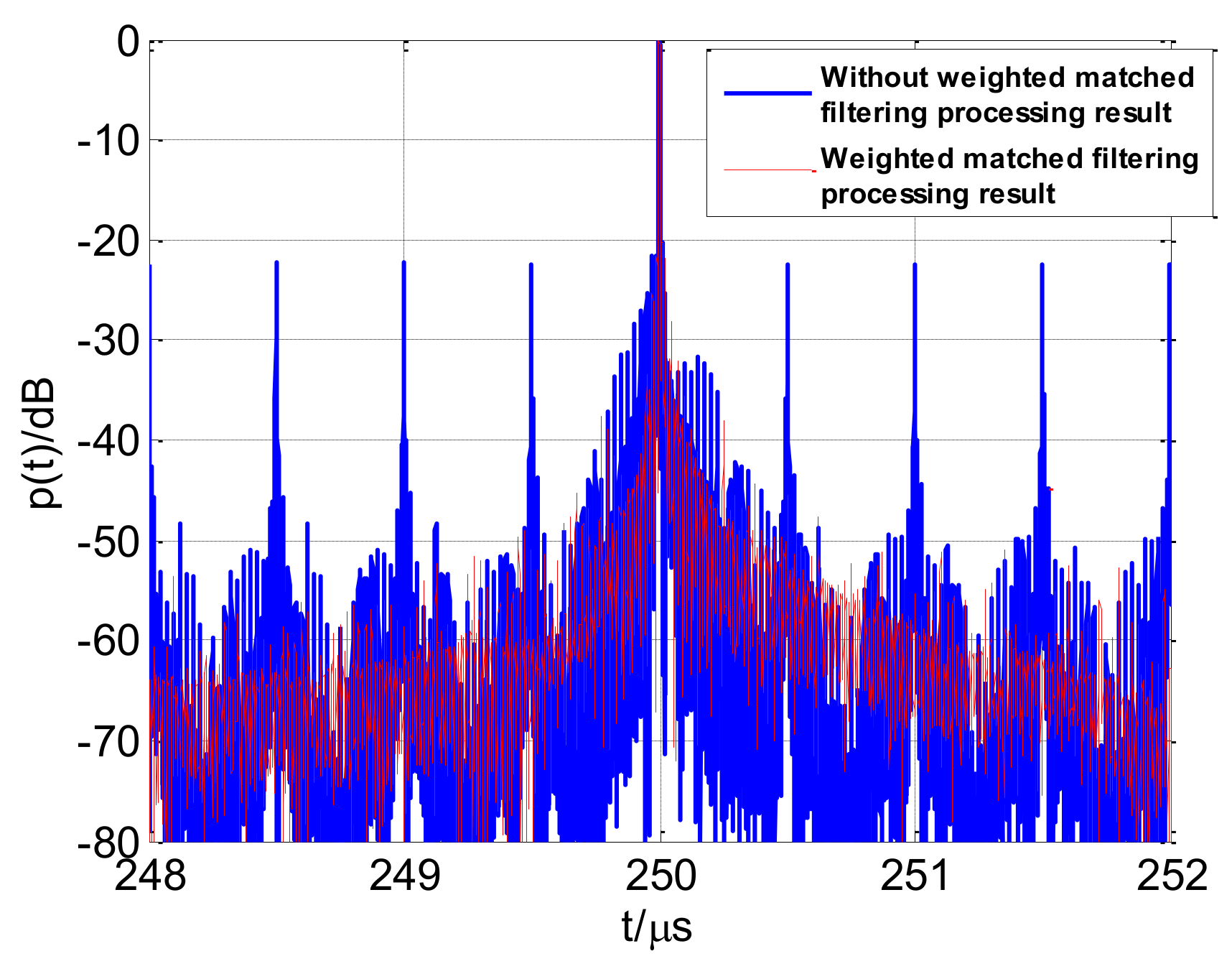
- Take the spectrum splicing synthesis and the weighted inverse matched filter processing;
- Perform the inverse fast Fourier transformation (IFFT) for the synthesized wideband spectrum and get the high-resolution range profile.
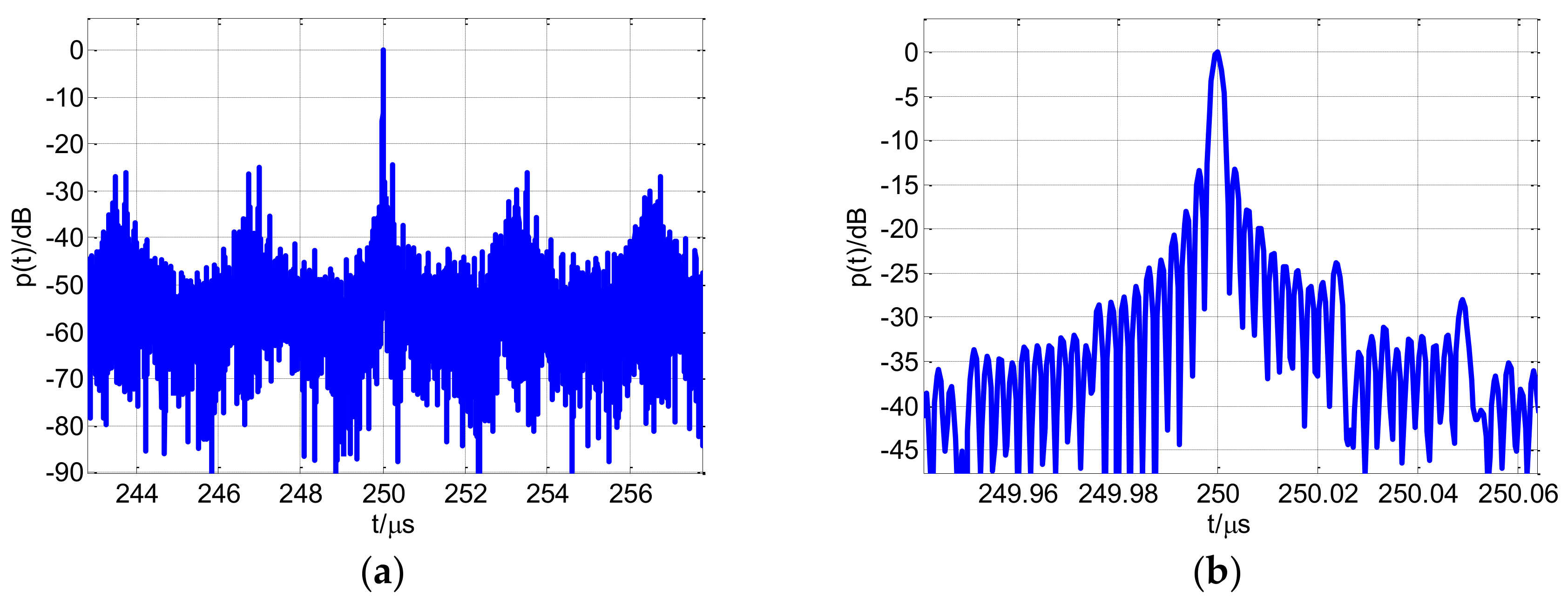
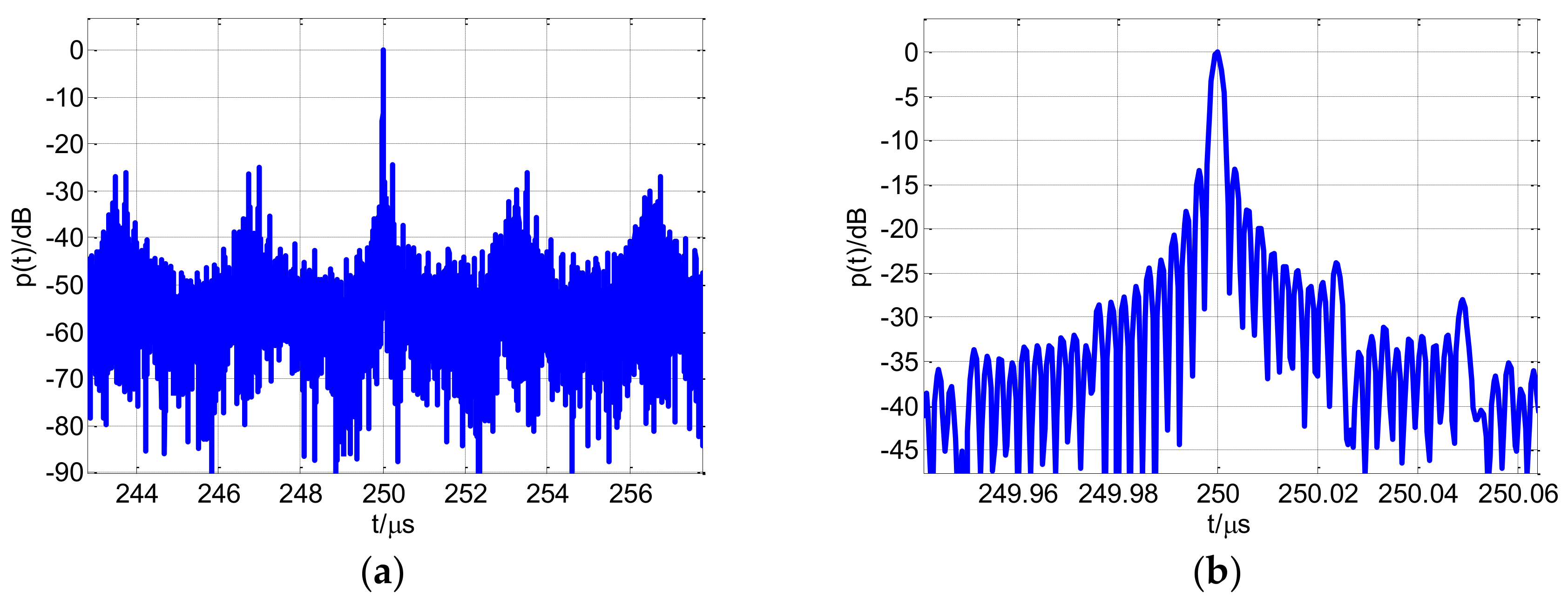
5. Simulation and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chaotic Mapping | Bernoulli | Modified Bernoulli |
| Iterative formula | ||
| Chaotic Mapping | Logistic | Tent |
| Iterative formula | ||
| Chaotic Mapping | Skew Tent | Modified Skew Tent |
| Iterative formula |
Appendix B
| Sidelobe Level | Bernoulli | Logistic | Tent | Skew Tent |
| 1 | 0.48% | 0% | 0% | 0% |
| 2 | 10.2% | 23.35% | 21.78% | 1.89% |
| 3 | 33.26% | 42.3% | 43.17% | 10.57% |
| 4 | 28.94% | 19.36% | 19.67% | 19.88% |
| 5 | 15.54% | 9.38% | 9.63% | 16.1% |
| 6 | 7.39% | 3.34% | 3.43% | 14.12% |
| 7 | 2.85% | 1.18% | 1.21% | 6.09% |
| 8 | 0.94% | 0.83% | 0.83% | 17.64% |
| 9 | 0.4% | 0.26% | 0.26% | 13.71% |
| Sidelobe Level | Modified Bernoulli | Modified Skew Tent | Gaussian Random | Uniform Random |
| 1 | 0.055743% | 0.07055% | 0.057% | 0.074% |
| 2 | 34% | 34.04% | 39.07% | 38.82% |
| 3 | 48.56% | 49.3467% | 49.4% | 49.66% |
| 4 | 13.55% | 12.97% | 10.123% | 10.04% |
| 5 | 3.04% | 2.84% | 1.23% | 1.27% |
| 6 | 0.64% | 0.59% | 0.11% | 0.128% |
| 7 | 0.13% | 0.11% | 0.009% | 0.0075% |
| 8 | 0.0188% | 0.0286% | 0.001% | 0.0005% |
| 9 | 0.005495% | 0.00415% | 0% | 0% |
References
- Zhang, M.; Liu, L.; Diao, M. LPI Radar Waveform Recognition Based on Time-Frequency Distribution. Sensors 2016, 16, 1682. [Google Scholar] [CrossRef] [PubMed]
- She, J.; Wang, F.; Zhou, J. A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network. Sensors 2016, 16, 2193. [Google Scholar] [CrossRef] [PubMed]
- Schleher, D.C. LPI radar: Fact or fiction. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 3–6. [Google Scholar] [CrossRef]
- Cheng, Y.; Bao, Z.; Zhao, F.; Lin, Z. Doppler compensation for binary phase-coded waveforms. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1068–1072. [Google Scholar] [CrossRef]
- Singh, S.P.; Rao, K.S. Discrete frequency-coded radar signal design. IEEE Signal Process. 2009, 3, 7–16. [Google Scholar] [CrossRef]
- Fu, Y.; Li, Y.; Huang, Q.; Zhang, K. Design and analysis of LFM/Barker RF stealth signal waveform. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 591–595. [Google Scholar]
- Skinner, B.J.; Donohoe, J.P.; Ingels, F.M. Simplified performance estimation of FSK/PSK hybrid signaling radar systems. In Proceedings of the IEEE 1993 National Conference on Aerospace and Electronics, Dayton, OH, USA, 24–28 May 1993; pp. 255–261. [Google Scholar]
- Donohoe, J.P.; Ingels, F.M. The ambiguity properties of FSK/PSK signals. In Proceedings of the IEEE 1990 International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; pp. 268–273. [Google Scholar]
- Fancey, C.; Alabaster, C.M. The metrication of low probability of intercept waveforms. In Proceedings of the 2010 International Waveform Diversity and Design Conference (WDD), Niagara Falls, ON, Canada, 8–13 August 2010; pp. 58–62. [Google Scholar]
- Yang, H.; Zhou, J.; Fei, W.; Zhang, Z. Design and analysis of Costas/PSK RF stealth signal waveform. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 1247–1250. [Google Scholar]
- LeMieux, J.A.; Ingels, F.M. Analysis of FSK/PSK modulated radar signals using Costas arrays and complementary Welti codes. In Proceedings of the IEEE 1990 International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; pp. 589–594. [Google Scholar]
- Yang, H.B.; Chen, J. Design of Costas/PSK continuous wave LPI radar signal. Int. J. Electron. 2016, 104, 404–415. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.; Xing, M.; Li, Y.; Bao, Z. High-Resolution ISAR Imaging with Sparse Stepped-Frequency Waveforms. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4630–4651. [Google Scholar] [CrossRef]
- Sun, B.; Lopez, J.; Qiao, Z. Image reconstruction and compressive sensing in MIMO radar. In Proceedings of the 2014 SPIE DSS, Baltimore, MD, USA, 5–9 May 2014. [Google Scholar]
- Taylor, K.; Rickard, S.; Drakakis, K. Costas Arrays, Number of Hops, and Time-Bandwidth Product. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1995–2004. [Google Scholar] [CrossRef]
- Touati, N.; Tatkeu, C.; Chonavel, T.; Rivenq, A. Design and performances evaluation of new Costas-based radar waveforms with pulse coding diversity. IET Radar Sonar Navig. 2016, 10, 877–891. [Google Scholar] [CrossRef] [Green Version]
- Golomb, S.W.; Taylor, H. Constructions and properties of Costas arrays. Proc. IEEE 1984, 72, 1143–1163. [Google Scholar] [CrossRef]
- Beard, J.K.; Russo, J.C.; Erickson, K.G.; Monteleone, M.C.; Wright, M.T. Costas array generation and search methodology. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 522–538. [Google Scholar] [CrossRef]
- Dudczyk, J. A Method of Features Selection in the Aspect of Specific Identification of Radar Signals. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 65, 113–119. [Google Scholar] [CrossRef]
- Dudczyk, J. Radar Emission Sources Identification Based on Hierarchical Agglomerative Clustering for Large Data Sets. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- Dudczyk, J.; Kawalec, A. Fast-decision Identification Algorithm of Emission Source Pattern in Database. Bull. Pol. Acad. Sci. Tech. Sci. 2015, 63, 385–389. [Google Scholar] [CrossRef]
- Axelsson, S.R. Analysis of Random Step Frequency Radar and Comparison with Experiments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 890–904. [Google Scholar] [CrossRef]
- Galati, G.; Pavan, G.; Palo, F.D.; Stove, A. Potential Applications of Noise Radar Technology and Related Waveform Diversity. In Proceedings of the 2016 17th International Conference on Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–5. [Google Scholar]
- Schmitt, A.; Collins, P. Demonstration of a Network of Simultaneously Operating Digital Noise Radars [Measurements Corner]. IEEE Trans. Antennas. Propag. Mag. 2009, 51, 125–130. [Google Scholar] [CrossRef]
- Deng, Y.; Hu, Y.; Geng, X. Hyper Chaotic Logistic Phase Coded Signal and Its Sidelobe Suppression. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 672–686. [Google Scholar] [CrossRef]
- Chen, H.C.; Ben-Yi, L.; Hou, Y.Y. Hardware Implementation of Lorenz Circuit Systems for Secure Chaotic Communication Applications. Sensors 2013, 13, 2494–2505. [Google Scholar] [CrossRef] [PubMed]
- Mansour, A.E.; Saad, W.M.; El Ramly, S.H. Adaptive chaotic frequency hopping. In Proceedings of the 2015 Tenth International Conference on Computer Engineering & Systems (ICCES), Cairo, Egypt, 23–24 December 2015; pp. 328–331. [Google Scholar]
- Jung, J.; Lim, J. Chaotic Standard Map Based Frequency Hopping OFDMA for Low Probability of Intercept. IEEE Commun. Lett. 2011, 15, 1019–1021. [Google Scholar] [CrossRef]
- Yang, J.; Qiu, Z.; Li, X.; Zhuang, Z. Analysis and Processing of the Chaotic-based Random Stepped Frequency Signal. J. Natl. Univ. Def. Technol. 2012, 34, 163–169. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, Y.; Gu, X. Wide-Band Chaotic Noise Signal for Velocity Estimation and Imaging of High-Speed Moving Targets. Prog. Electromagn. Res. B 2015, 63, 1–15. [Google Scholar] [CrossRef]
- Zaslavsky, G.M. Chaos, fractional kinetics, and anomalous transport. Phys. Rep. 2002, 371, 461–580. [Google Scholar] [CrossRef]
- Deng, H.; Li, T.; Wang, Q.; Li, H. A Novel Chaotic Slow FH System Based on Differential Space-Time Modulation. In Proceedings of the 2008 International Conference on Embedded Software and Systems Symposia, Sichuan, China, 29–31 July 2008; pp. 380–385. [Google Scholar]
- Zhang, H.; Cao, Y. A New Hybrid Chaotic Frequency Hopping Sequence. In Proceedings of the 2009 International Conference on Management and Service Science (MASS), Wuhan, China, 20–22 September 2009; pp. 1–4. [Google Scholar]
- Mi, L.; Zhu, Z. Frequency-hopping sequences based on chaotic map. In Proceedings of the 2004 7th International Conference on Signal Processing, Beijing, China, 31 August–4 September 2004; pp. 1825–1828. [Google Scholar]
- Cheng, B.; Li, W.; Li, Z.; Wang, F. A Method for Generating Chaotic Frequency Hopping Sequences based on Queuing Theory and Their Performance Analysis. J. Nankai Univ. 2001, 134, 71–75. [Google Scholar] [CrossRef]
- Chen, B. Assessment and improvement of autocorrelation performance of chaotic sequences using a phase space method. Sci. China Inf. Sci. 2011, 54, 2647–2659. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, J. Research of chaotic FH sequences generated by combined map. Chin. J. Radio Sci. 2006, 21, 895–898. [Google Scholar] [CrossRef]
- Huang, Q.; Li, Y.; Cheng, W.; Liu, W.; Li, B. A New Multicarrier Chaotic Phase Coded Stepped-Frequency Pulse Train Radar Signal and Its Characteristic Analysis. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 444–448. [Google Scholar]
- Cao, S.; Zheng, K.; Meng, X.; Pan, C.; He, Z. Detection Performance Analysis on a New Multi-Cycle FSK/PSK Signal. In Proceedings of the 2012 International Conference on Computational Problem-Solving (ICCP), Leshan, China, 19–21 October 2012; pp. 55–58. [Google Scholar]
- Lord, R.T. Aspects of Stepped-Frequency Processing for Low-Frequency SAR Systems. Ph.D. Thesis, University of Cape Town, Cape Town, South Africa, 2000. [Google Scholar]
- Nel, W.; Tait, J.; Lord, R.; Wilkinson, A. The Use of a Frequency Domain Stepped Frequency Technique to Obtain High Range Resolution on the CSIR X-Band SAR System. In Proceedings of the 2002 6th Africon Conference in Africa, George, South Africa, 2–4 October 2002; pp. 327–332. [Google Scholar]
- Bao, Y. Signal Processing Algorithm in Stepped Frequency Wideband Radar. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, 2010. [Google Scholar]



| Parameter | Value |
|---|---|
| 0.25 | |
| 13 | |
| 10 | |
| 10 | |
| 4 MHz | |
| 40 MHz | |
| 10 GHz | |
| 500 | |
| 500 m/s | |
| 250 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, T.; Chang, S.; Fan, H.; Liu, Q. Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal. Sensors 2018, 18, 985. https://doi.org/10.3390/s18040985
Zeng T, Chang S, Fan H, Liu Q. Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal. Sensors. 2018; 18(4):985. https://doi.org/10.3390/s18040985
Chicago/Turabian StyleZeng, Tao, Shaoqiang Chang, Huayu Fan, and Quanhua Liu. 2018. "Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal" Sensors 18, no. 4: 985. https://doi.org/10.3390/s18040985
APA StyleZeng, T., Chang, S., Fan, H., & Liu, Q. (2018). Design and Processing of a Novel Chaos-Based Stepped Frequency Synthesized Wideband Radar Signal. Sensors, 18(4), 985. https://doi.org/10.3390/s18040985