Three-Dimensional Terahertz Coded-Aperture Imaging Based on Geometric Measures



Abstract
:1. Introduction
2. Imaging Method
2.1. Conventional TCAI
2.2. GM-Based TCAI
2.2.1. Pulse Compression through the Dechirping Technique
2.2.2. Signal Extraction by GMs
- Problem Description
- B.
- Geometry Solution
- C.
- Range Profile Extraction
2.2.3. Conformation of the Reference Signal Matrix
2.2.4. Imaging Model Based on GMs
3. Experimental Results
3.1. Range Profile Extraction Based on GMs
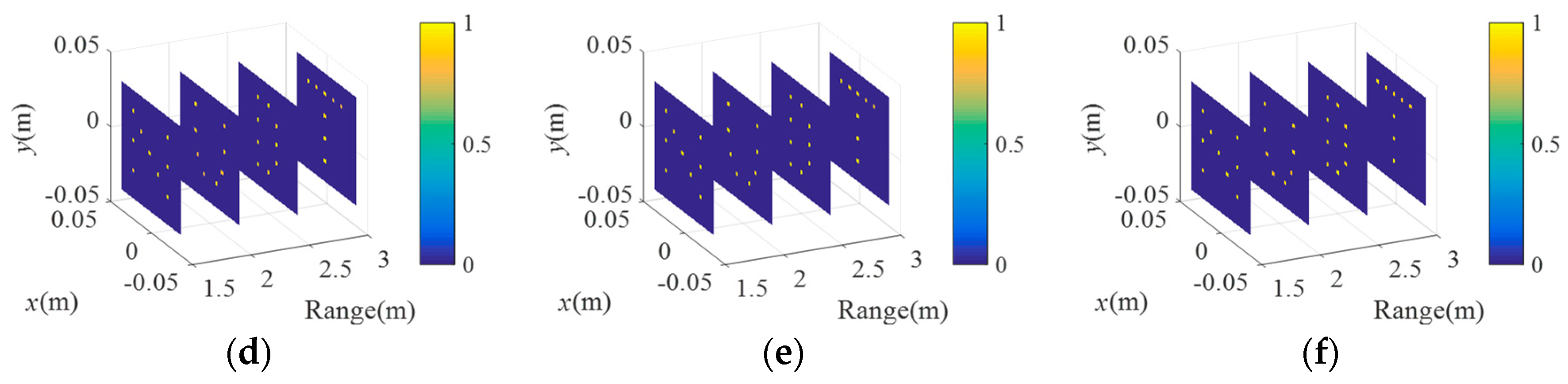
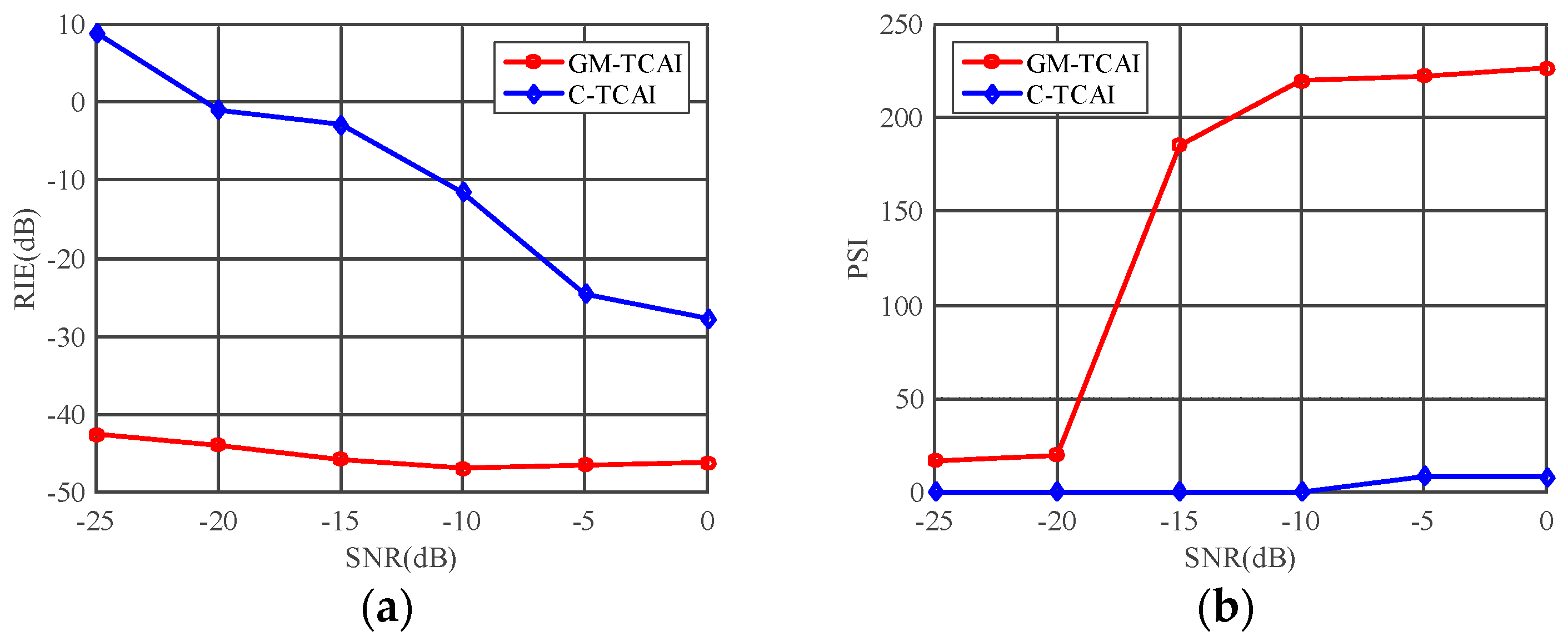
3.2. Imaging Results for Sparse Targets
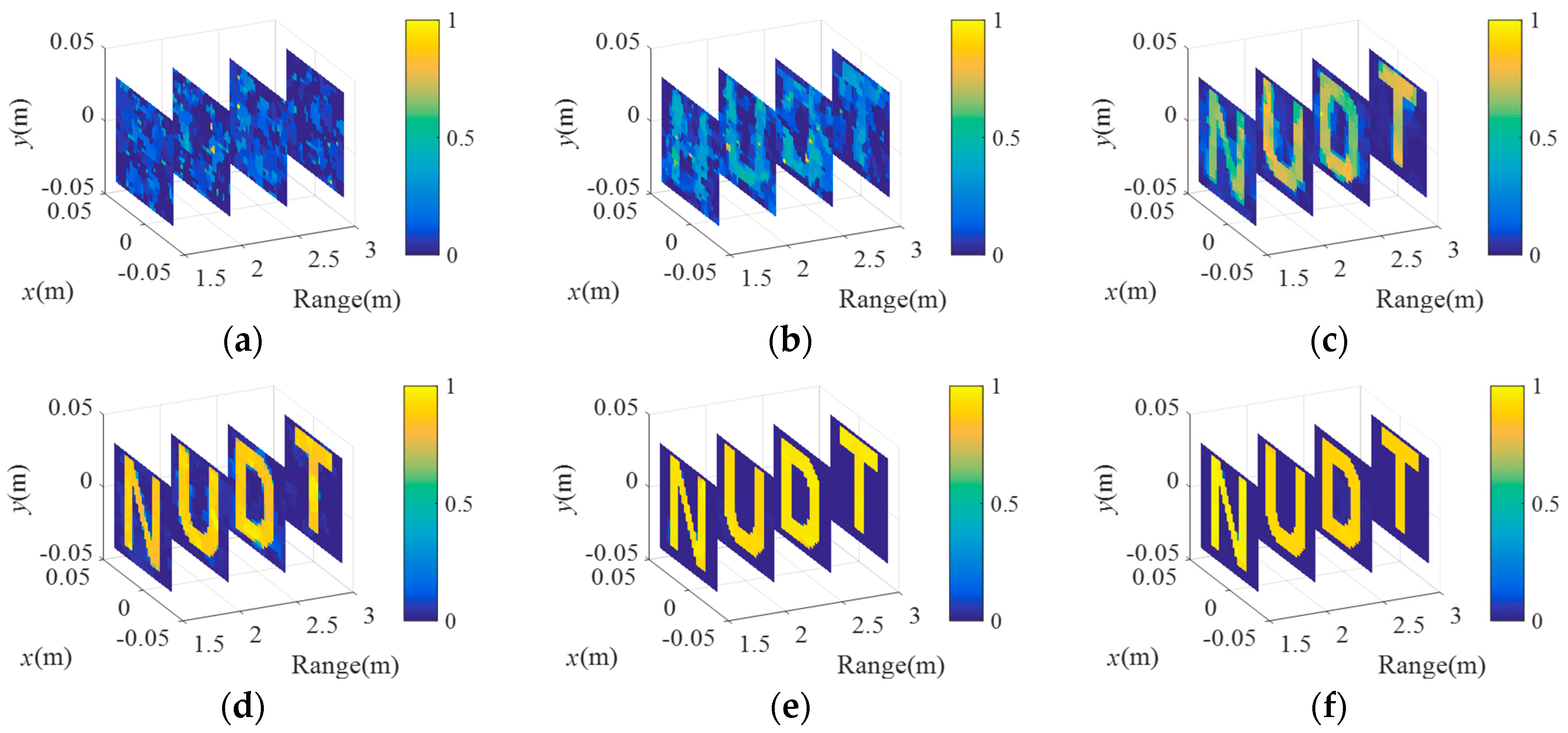
3.3. Imaging Results for Extended Targets
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Watts, C.M.; Shrekenhamer, D.; Montoya, J.; Lipworth, G.; Hunt, J.; Sleasman, T.; Krishna, S.; Smith, D.R.; Padilla, W.J. Terahertz compressive imaging with metamaterial spatial light modulators. Nat. Photonics 2014, 8, 605–609. [Google Scholar] [CrossRef]
- Li, Y.B.; Li, L.L.; Xu, B.B.; Wu, W.; Wu, R.Y.; Wan, X.; Cheng, Q.; Cui, T.J. Transmission-type 2-bit programmable metasurface for single-sensor and single-frequency microwave imaging. Sci. Rep. 2016, 6, 23731. [Google Scholar] [CrossRef] [PubMed]
- Gollub, J.N.; Yurduseven, O.; Trofatter, K.P.; Arnitz, D.; F Imani, M.; Sleasman, T.; Boyarsky, M.; Rose, A.; Pedross-Engel, A.; Odabasi, H.; et al. Large metasurface aperture for millimeter wave computational imaging at the human-scale. Sci. Rep. 2017, 7, 42650. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Tan, S.; Wu, J.; Li, E.; Shen, X.; Han, S. Spectral camera based on ghost imaging via sparsity constraints. Sci. Rep. 2016, 6, 25718. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Lu, R.; Han, S.; Xie, H.; Du, G.; Xiao, T.; Zhu, D. Fourier-transform ghost imaging with hard X rays. Phys. Rev. Lett. 2016, 117, 113901. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Li, X.; Qin, Y.; Cheng, Y.; Wang, H. Radar Coincidence Imaging: An Instantaneous Imaging Technique with Stochastic Signals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2261–2277. [Google Scholar]
- Li, D.; Li, X.; Qin, Y.; Cheng, Y.; Wang, H. Radar Coincidence Imaging under Grid Mismatch. ISRN Signal Process. 2016, 2014, 987803. [Google Scholar] [CrossRef]
- Tribe, W.R.; Taday, P.F.; Kemp, M.C. Hidden object detection: Security applications of terahertz technology. Proc. SPIE Int. Soc. Opt. Eng. 2004, 5354, 168–176. [Google Scholar]
- Sheen, D.M.; Hall, T.E.; Severtsen, R.H.; McMakin, D.L.; Hatchell, B.K.; Valdez, P.L.J. Standoff concealed weapon detection using a 350-GHz radar imaging system. Proc. SPIE Int. Soc. Opt. Eng. 2010, 7670, 115–118. [Google Scholar]
- Friederich, F.; Spiegel, W.V.; Bauer, M.; Meng, F.; Thomson, M.D.; Boppel, S.; Lisauskas, A.; Hils, B.; Krozer, V.; Keil, A.; et al. THz active imaging systems with real-time capabilities. IEEE Trans. Terahertz Sci. Technol. 2011, 1, 183–200. [Google Scholar] [CrossRef]
- Wallace, H.B. Advanced Scanning Technology for Imaging Radars (ASTIR). Available online: https://govtribe.com/project/advanced-scanning-technology-for-imaging-radars-astir-1 (accessed on 15 May 2018).
- Jonathan, J.L.; Florian, H.; Keerti, K.; Virbila, G.; McGuire, C.; Wetzel, M.; Fung, H.; Prophet, E. Coded aperture subreflector array for high resolution radar imaging. Proc. SPIE 2017, 10189, 101890I. [Google Scholar]
- Tomas, Z.; Jonah, N.G.; Daniel, L.M.; Smith, D.R. Design and analysis of a W-band metasurface-based computational imaging system. IEEE Access. 2017, 5, 9911–9918. [Google Scholar]
- Sleasman, T.; Boyarsky, M.; Pulido-Mancera, L.; Fromenteze, T.; Imani, M.F.; Reynolds, M.S.; Smith, D.R. Experimental Synthetic Aperture Radar with Dynamic Metasurfaces. Nat. Commun. 2013, 4, 2808. [Google Scholar] [CrossRef]
- Hashemi, M.R.M.; Yang, S.H.; Wang, T.Y.; Sepúlveda, N.; Jarrahi, M. Electronically-controlled beam-steering through vanadium dioxide metasurfaces. Sci. Rep. 2016, 6, 35439. [Google Scholar] [CrossRef] [PubMed]
- Naftali, L.; Eran, S. Design and measurements of 100 GHz reflectarray and transmitarray active antenna cells. IEEE Trans. Antennas Propag. 2017, 65, 6986–6997. [Google Scholar]
- Chen, S.; Luo, C.G.; Wang, H.Q.; Cheng, Y.Q.; Zhuang, Z.W. Three-dimensional terahertz coded-aperture imaging based on single input multiple output technology. Sensors 2018, 18, 303. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Luo, C.G.; Wang, H.Q.; Deng, B.; Cheng, Y.Q.; Zhuang, Z.W. Three-dimensional terahertz coded-aperture imaging based on matched filtering and convolutional neural network. Sensors 2018, 18, 1342. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.Q.; Hua, X.Q.; Wang, H.Q.; Qin, Y.L.; Li, X. The Geometry of Signal Detection with Applications to Radar Signal Processing. Entropy 2016, 18, 381. [Google Scholar] [CrossRef]
- Hua, X.Q.; Cheng, Y.Q.; Wang, H.Q.; Qin, Y.L.; Li, Y.B. Geometric means and medians with applications to target detection. IET Signal Process. 2017, 11, 711–720. [Google Scholar] [CrossRef]
- Johnson, C.R. Positive Definite Matrices. Am. Math. Mon. 1970, 77, 69–75. [Google Scholar] [CrossRef]
- Wolkowicz, H.; Saigal, R.; Vandenberghe, L. Handbook of Semidefinite Programming: Theory, Algorithms and Applications; Kluwer: Alphen aan den Rijn, The Netherlands, 2000. [Google Scholar]
- Terras, A. Harmonic Analysis on Symmetric Spaces and Applications II; Springer: Berlin, Germany, 2014. [Google Scholar]
- Cao, K.C.; Zhou, X.L.; Cheng, Y.Q.; Huang, Y.; Qin, Y.L. Total variation-based method for radar coincidence imaging with model mismatch for extended target. J. Electron. Imaging 2017, 26, 063007. [Google Scholar] [CrossRef]
- Zhou, X.L.; Wang, H.Q.; Cheng, Y.Q.; Qin, Y.L. Radar Coincidence Imaging with Phase Error Using Bayesian Hierarchical Prior Modeling. J. Electron. Imaging 2016, 25, 013018. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Back signal matrix, , with M back signal vectors. |
| Step 1 | Obtain the range profile matrix, , via Equations (7) and (8). |
| Step 2 | Obtain the HPD matrices, , from via Equation (10). |
| Step 3 | Calculate the mean KLD, , of the HPD matrices, , via Equation (14). |
| Step 4 | for I = 1:N, compare the divergence between and referring to Equation (12), and extract the range profile vectors, , , , and , via Equation (14). end Return: (1) The row position tags, , , , and , of the imaging planes containing targets. (2) Combination of the extracted range profile vectors, , , , and , via Equation (18). |
| Step 5 | Construct the range profile reference signal matrices, , , , and , corresponding to , , , and via Equation (19) and the procedure detailed in Section 2.2.3. |
| Step 6 | Reconstruct , , , and from different imaging planes, according to Equation (20). |
| Return | Obtain the initial 3D imaging result, , through a combination of , , , and . |
| Parameter | Value |
|---|---|
| Center frequency (fc) | 340 GHz |
| Bandwidth (B) | 20 GHz |
| Pulse Width (Tp) | 100 ns |
| Size of the coded aperture | 0.5 m × 0.5 m |
| Number of coded-aperture array elements | 25 × 25 |
| Sampling frequency (fs) | 25 GHz |
| Range of Scene 1 | 1.5 m |
| Range of Scene 2 | 2 m |
| Range of Scene 3 | 2.5 m |
| Range of Scene 4 | 3 m |
| Size of the grid cell | 0.0025 m × 0.0025 m |
| Number of grid cells in each scene | 30 × 30 |
| GM divergence | Kullback–Leibler divergence (KLD) |
| Conventional TCAI | GM-TCAI | |
|---|---|---|
| Runtime | 41.4877 s | 1.1040 s |
| C-TCAI | GM-TCAI | |
|---|---|---|
| Runtime | 51.1916 s | 14.6427 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Hua, X.; Wang, H.; Luo, C.; Cheng, Y.; Deng, B. Three-Dimensional Terahertz Coded-Aperture Imaging Based on Geometric Measures. Sensors 2018, 18, 1582. https://doi.org/10.3390/s18051582
Chen S, Hua X, Wang H, Luo C, Cheng Y, Deng B. Three-Dimensional Terahertz Coded-Aperture Imaging Based on Geometric Measures. Sensors. 2018; 18(5):1582. https://doi.org/10.3390/s18051582
Chicago/Turabian StyleChen, Shuo, Xiaoqiang Hua, Hongqiang Wang, Chenggao Luo, Yongqiang Cheng, and Bin Deng. 2018. "Three-Dimensional Terahertz Coded-Aperture Imaging Based on Geometric Measures" Sensors 18, no. 5: 1582. https://doi.org/10.3390/s18051582
APA StyleChen, S., Hua, X., Wang, H., Luo, C., Cheng, Y., & Deng, B. (2018). Three-Dimensional Terahertz Coded-Aperture Imaging Based on Geometric Measures. Sensors, 18(5), 1582. https://doi.org/10.3390/s18051582