1. Introduction
Distributed fiber-optic vibration sensors based on Φ-OTDR have received substantial research attention in recent years owing to their distinct advantages of high sensitivity, accurate positioning, good spatial resolution, and simultaneous multi-point monitoring capability [
1,
2,
3]. Therefore, they exhibit huge potential in various applications such as intruder detection [
4], structural health monitoring [
5] and oil/gas pipelines integrity threat prevention [
6], etc. The operating principle of the Φ-OTDR technique is based on detection and location of the phase changes of the Rayleigh back-scattering (RBS) light. In an Φ-OTDR system, a highly coherent laser instead of the traditional broadband light source is adopted, hence, the received RBS signal is modulated in a jagged appearance owing to the coherent interaction of numerous Rayleigh scattering centers within the injected pulse duration [
7]. When a certain part of the sensing fiber is subject to an external vibration, the refractive index and/or the length of the sensing fiber will change at that position, thus resulting in a localized phase change in the light wave. Therefore, the intensity of the interference light will change at the time corresponding to the vibration position [
8].
For an Φ-OTDR system, the basic function is to locate the vibration position, which can be obtained by several methods such as the traditional difference value method [
9], the edge detection method [
10], and the wavelet packet transform based method [
11], etc. Usually, the direct detection method is adopted, since it is simple and robust [
12]. Moreover, rapid response to vibration events is of crucial importance in practical situations. In the previous literatures [
13,
14], real-time detection is mentioned, but not quantized. For the commercially available products, the responses time is approximately 2 s. Thus, there still remains a need for a faster and quantized response time for the Φ-OTDR system.
In addition, with the development of Φ-OTDR, the mere position detection can hardly satisfy practical needs. In some occasions, not only the vibration position, but also the vibration type, e.g., frequency and relative amplitude, is needed to comprehensively judge a vibration signal. In 2010, Bao et al. proposed a coherent detection method, where the signal-to-noise-ratio (SNR) was improved due to the coherent amplification effect through controlling the power of local oscillator [
15]. Based on the coherent scheme, the vibration type can be obtained by analyzing the beat portion of coherent detection [
16]. Another method to achieve vibration type is merging interferometers, such as the Mach-Zehnder interferometer (MZI) [
17,
18] and Michelson interferometer (MI) [
19,
20]. In these systems, the vibration position was located by the Φ-OTDR architecture, while the frequency and amplitude information was achieved by demodulating the interference signal. For the coherent detection method and the combining Φ-OTDR with interferometers method, more devices are required, which increases the complexity and cost. In comparison, the direct detection method is less complex, simpler, and more robust. In recent years, some investigations in regard to the vibration type are conducted utilizing the direct detection method. For instance, a graphics processing unit-based parallel computing method was proposed to perform space-frequency analysis [
21]. Muanenda et al. achieved high-frequency vibration information with minimal post-processing by suitable design of the amplification and modulation of the pulses [
22].
In this paper, a novel data matrix matching method is proposed and employed in the direct Φ-OTDR sensing system. Firstly, the original data stream is transformed into the matrix form through data synchronization. Subsequently, the data dimensionality reduction is conducted to improve the system response performance. Finally, the effective data is completely transmitted to the host computer for real-time vibration detection and type identification.
This article is structured as follows: the underlying principle of the proposed method is detailed in
Section 2, followed by a description of the system implementation in
Section 3. Experimental results are presented and discussed in
Section 4. Finally, the conclusions are drawn in
Section 5.
2. Theoretical Analysis
When the light pulse propagating in the sensing fiber, the RBS traces are generated. Assuming that {
P1,
P2, …,
PN} is
N probe pulses emitted from the laser within one second, and {
X1,
X2, …,
XN} is the corresponding raw RBS traces, which can be expressed as:
where
Xi = [
xi1,
xi2, …,
xiM], which represents the
i-th reflectogram caused by the
i-th probe pulse. The amount of raw data generated by the probe pulse within one second used to monitor the vibration response of the entire fiber is massive. In this case, data synchronization of the reflectograms is of great importance in order to comprehensively judge the vibration information. Therefore, a data flag is added to each RBS trace, that is
X’i = [
xf,
xi1,
xi2, …,
xiM]. Subsequently, the obtained signal
X within one second can be expressed in a matrix form, that is:
Thus, in Equation (2), the row vector is related to the sensing distance/time, while the column vector represents the repeated measurements under different light pulses. Supposing that
fp is the pulse repetition frequency and
fs is the sampling frequency, the number of rows
N and columns
M within one second are given by:
Subsequently, the
k-th column vector which corresponds to the sensing fiber end can be expressed as:
where
l0 is sensing fiber length,
n is the refractive index, and
c is the light speed in vacuum. Thus, during one second time interval, the original signal matrix
X includes two parts:
Xs and
Xv, which can be respectively extracted by introducing matrix
S and
V:
where
S is an (
M + 1) × (
k + 1) matrix composed by a (
k + 1) × (
k + 1) diagonal matrix (
A) and an (
M −
k) × (
k + 1) null matrix (
B).
V is an (
M + 1) × (
M −
k) matrix composed by a (
k + 1) × (
M −
k) null matrix (
C) and an (
M −
k) × (
M −
k) diagonal matrix (
D), as shown in Equations (6) and (7):
and:
Then, in order to improve the system real-time performance, although the raw trace set
X is acquired, only the effective portion
Xs is transmitted for post-processing. The total data amount in bits of
X and
Xs within one second is given in Equation (8):
where
η = 2
nfpl0/
c and thus is smaller than 1. Hence, the transmitted data amount is reduced by
η times. In order to achieve complete data transmission without packet loss, the transmission speed should be no less than
Vs bps. As shown in Equation (8),
Vs is determined by the parameters of
n,
fs,
fp,
l0 and
c. Among them,
n and
c are constants, thus,
Vs is actually determined by
fp,
fs, and
l0. That is, if the transmission speed matches with the parameters of the data matrix, the effective data can be completely transmitted without packet loss. Practically, due to existence of the upper limit of transmission speed of the interface, the maximum sensing fiber length, and thus the value of
k used in constructing the two matrices, is limited.
In addition, since the data is completely transmitted,
Xe contains the full effective information of the RBS signal
X. Assuming that an external vibration with a frequency
fv applied on a certain point of the fiber, taking the
j-th column vector
xj of the matrix:
Thus, the detected RBS signal will change at that position which corresponding to the
j-th column vector. The sampling frequency is proportional to the number of RBS traces within one second, which reaches the upper limit (
fp) in our system, such that:
4. Experimental Results and Discussion
Preliminary experiments were performed in the laboratory to establish the feasibility of the proposed method. The experimental setup is demonstrated in
Figure 4. A narrow line-width laser (≈3 kHz) with an output power of 20 mW is adopted as the light source. The state of polarization is scrambled using a polarization controller (PC) to adjust the polarization of the light. Then, the continuous wave is modulated into narrow pulses of 200 ns through an acoustic optical modulator (AOM), which is driven by a signal generator (SG). Afterwards, the modulated light pulses are amplified by an erbium-doped fiber amplifier (EDFA), and finally launched into the fiber under test (FUT) via an optical circulator (OC). Finally, the coherent RBS light is detected by the PD, processed by the data acquisition card (DAQ) and the results are displayed on the upper system.
4.1. Real-Time Performance Test
Firstly, a real-time performance test of the proposed system is conducted. In the experiment, the sensing fiber length is 1.2 km, and hence the light propagating time of a round trip in the sensing fiber t1 is 12 μs. In addition, the pulse repetition period t2 is 125 μs (corresponding to 8 kHz repetition rate). Then, the RBS light is detected and converted to the electrical signal by the PD. Afterwards, the electrical signal is sampled by A/D module with a sampling rate of 50 MS/s. Hence, the sampling time t3 is 0.02 μs. Eventually, the data is transmitted to the host computer.
Figure 5 shows the 200 tests of transmission speed. As can be seen from
Figure 5, the transmission speed is within the range of 75.776 Mbps and 77.824 Mbps, hence, the transmission time
t4 is approximately 125 μs (16 bits per point, 600 effective sampling points). Therefore, the experimental results agree quite well with the theoretical analysis, that is, the transmission speed matches with the parameters of the data matrix preset in the experiment, which ensures complete transmission of the effective data. Finally, the processed results are displayed on the MFC interface of the host computer.
Thus, based on the previous analysis, the response time of our system is at the level of microsecond theoretically. However, the practical response time is restricted by the refresh time of the MFC software interface, indeed. As shown in
Figure 5, the refresh time of the MFC interface
t5 is at millisecond level, which is far greater than the sum of
t1,
t2,
t3 and
t4. As shown in
Figure 5, the refresh time is between the range of 47.6 ms and 52.6 ms. Therefore, the average response time of the our Φ-OTDR sensing system is 50.1 ms. In addition, the above-mentioned times are summarized in
Table 1.
4.2. Vibration Type Identification
Subsequently, the experiments concerning vibration type identification were also conducted to verify the proposed method. A PZT cylinder with 60 cm fiber wounded was put around 1 km over a total fiber length of 1.2 km as the vibration source. In the experiment, the PZT cylinder was driven by a signal generator (DG1022U, RIGOL, Beijing, China), whose modulation frequency and amplitude can be adjusted.
4.2.1. Sine Wave Signal Test
In our experiment, sinusoidal signal test was firstly carried out to evaluate the proposed method. A sinusoidal voltage of 20 v
p-p with a frequency of 400 Hz was applied to the PZT cylinder. Using the arrangement in
Figure 4, continuous raw 7000 RBS traces were recorded during 875 ms time interval. Then, the recorded traces were processed in the software and the experimental results were shown in
Figure 6a–e. Moreover, sine waves of frequencies of 200 Hz, 100 Hz and 50 Hz were also tested and the results were given in
Figure 6f–h.
Figure 6a shows the 3D plot of the detected optical intensity variation versus time and distance. It can be obviously seen that strong intensity variation has been appeared around 1 km, while basically remains constant at other positions. In addition, partially enlarged view and top view (0.32~0.34 s; 1~1.06 km) are presented in
Figure 6b,c. Continuous intensity variation with peaks synchronized with the applied frequency can be observed. Afterwards, the superimposed differential signal of the acquired 7000 RBS traces is shown in
Figure 6d, and the detected vibration position is 1.028 km, with a SNR of 10.45 dB. Finally, the vibration waveform is extracted and shown in
Figure 6e, and a clear sinusoidal signal with a frequency of 400 Hz is successfully detected. In addition, experiments of sinusoidal signals with different frequencies of 200 Hz, 100 Hz and 50 Hz were also conducted, and the experimental results are presented in
Figure 6f–h. Therefore, the experimental results prove the effectiveness of the proposed method.
4.2.2. Square Wave Signal Test
A square wave signal test was also carried out. In the experiment, a square voltage of 5 vp-p with a frequency of 50 Hz was applied to the PZT cylinder. Similar to the sine wave test, continuous 7000 raw RBS traces were continuously recorded during 875 ms time interval.
Afterwards, the recorded traces were processed in the software and the experimental results are presented in
Figure 7a–e. Moreover, square waves of different frequencies and amplitudes were also tested and the results were given in
Figure 7f–h.
Figure 7a shows the 3D plot of the intensity variation versus time and distance. Similarly, strong intensity variation around 1 km can be observed, while basically remains constant in other positions. Partially enlarged view and top view (0.32~0.4 s; 1~1.06 km) are shown in
Figure 7b,c. Impact intensity variation which is caused by the rising edge and falling edge of the square wave can be observed. Then, superimposed differential signal of the RBS traces is shown in
Figure 7d, the detected vibration position is 1.026 km and the SNR is 12.62 dB. Finally, the vibration waveform is extracted and shown in
Figure 7e, a clear square signal with a frequency of 50 Hz is successfully recovered. Moreover, experiments of square signals of 50 Hz 10 V
PP, 100 Hz 5 V
PP, and 100 Hz 10 V
PP were conducted and shown in
Figure 7f–h. Thus, the experimental results further verifies the effectiveness of the proposed data matrix matching method.
5. Conclusions
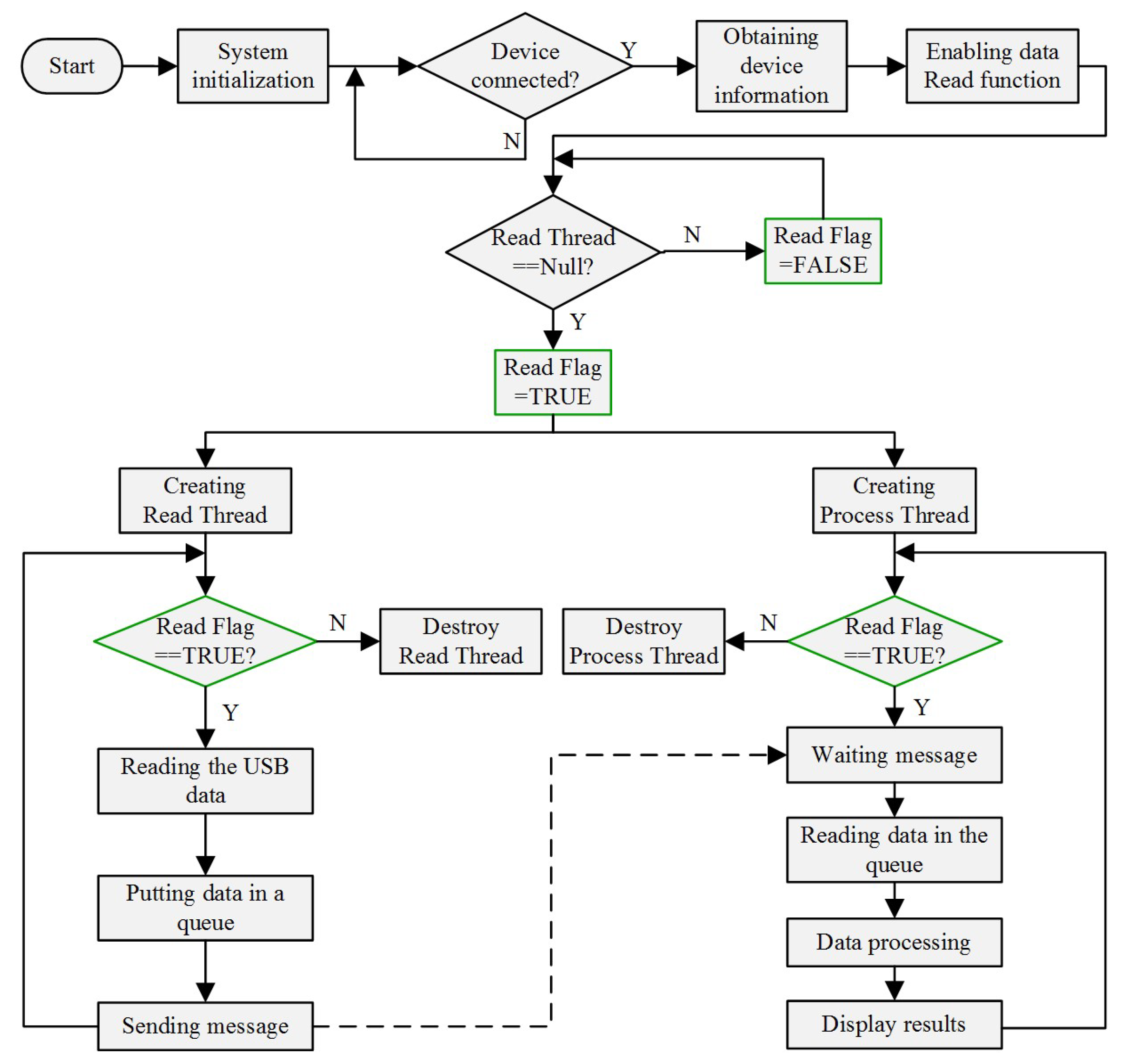
In this work, an efficient data matrix matching method is proposed and successfully employed in the Φ-OTDR system to achieve real-time vibration location and type identification. On one hand, real-time vibration detection is implemented in visual C++ based on the technique of dual-thread mechanism, and the response time is improved to millisecond level for the first time. On the other hand, vibration type identification is obtained by utilizing the proposed method. Preliminary experiments are carried out and the results prove the feasibility and validity of the proposed method. Vibration signals can be detected and located in real time over a total fiber length of 1.2 km with an average response time of 50.1 ms, under a data transmission speed which can go up to 77.824 Mbps. Moreover, different vibration types such as sine waves and square waves can also be successfully identified. Therefore, this new method provides a reliable and cost-effective solution for monitoring vibration information comprehensively and hence may find applications in many practical situations.
Also, more effort is still needed to further improve the sensing performance. For the HDIF used in our system, the maximum transmission speed is approximately 300 Mbps, tested by the Cypress official program. Since the pulse repetition rate is 8 kHz, thus, the maximum fiber length under the data matrix matching method is 4.7 km. Currently, we choose 1.2 km to establish the feasibility of the concept, and we are also trying to integrate faster data transmission interface and optimized algorithms for longer distance real-time vibration location and type identification.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}