Analysis of the Subdivision Errors of Photoelectric Angle Encoders and Improvement of the Tracking Precision of a Telescope Control System

 ,
,
Abstract
:1. Introduction
2. Mathematical Analysis on Subdivision Errors
2.1. DC Subdivision Error Analysis
2.2. Magnitude Subdivision Error Analysis
2.3. Phase Subdivision Error Analysis
2.4. Harmonic Subdivision Error Analysis
2.5. Noise Subdivision Error Analysis
2.6. Quantization Subdivision Error Analysis
3. Compensation Algorithm and Experiment Set Up
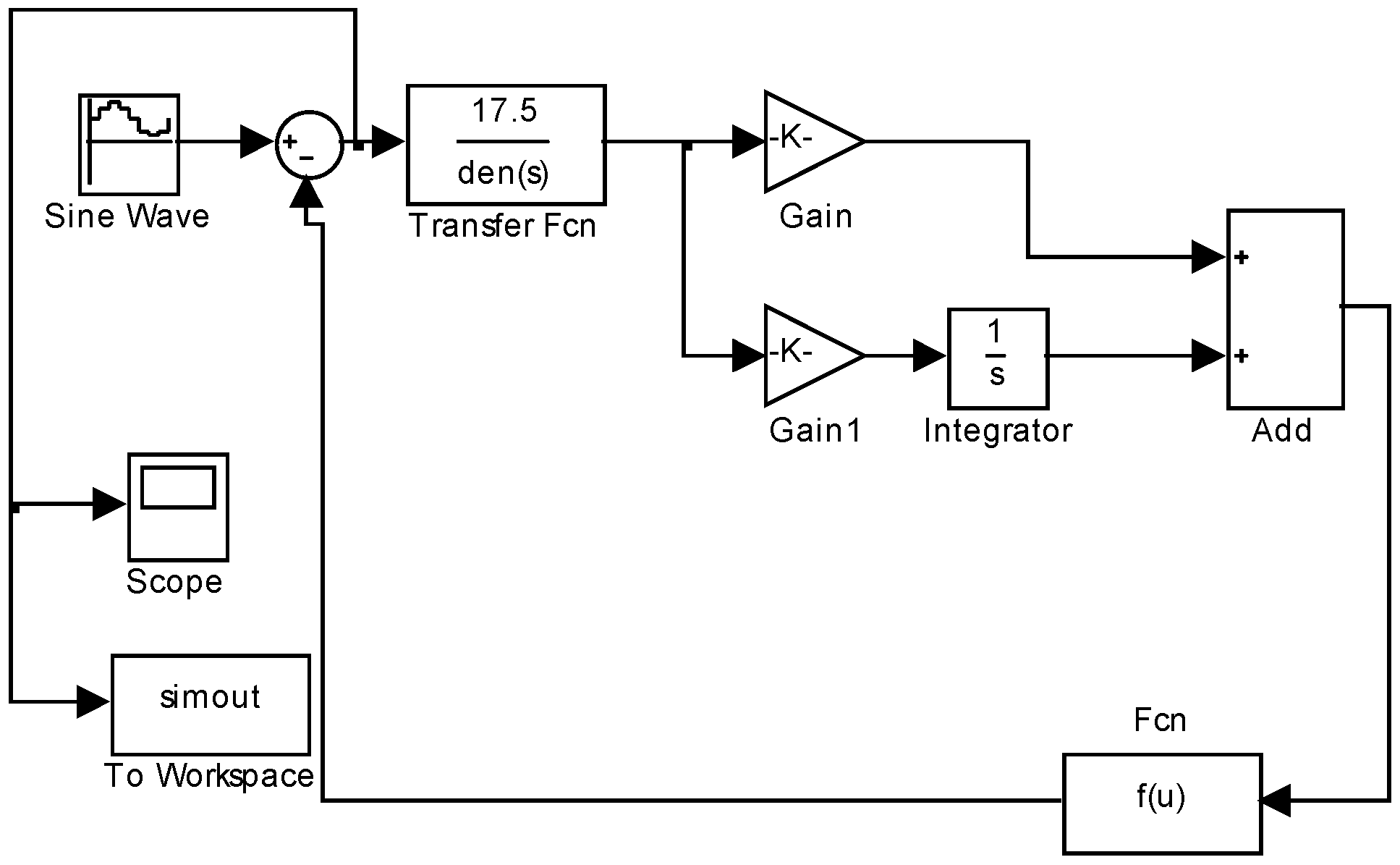
3.1. Simulations
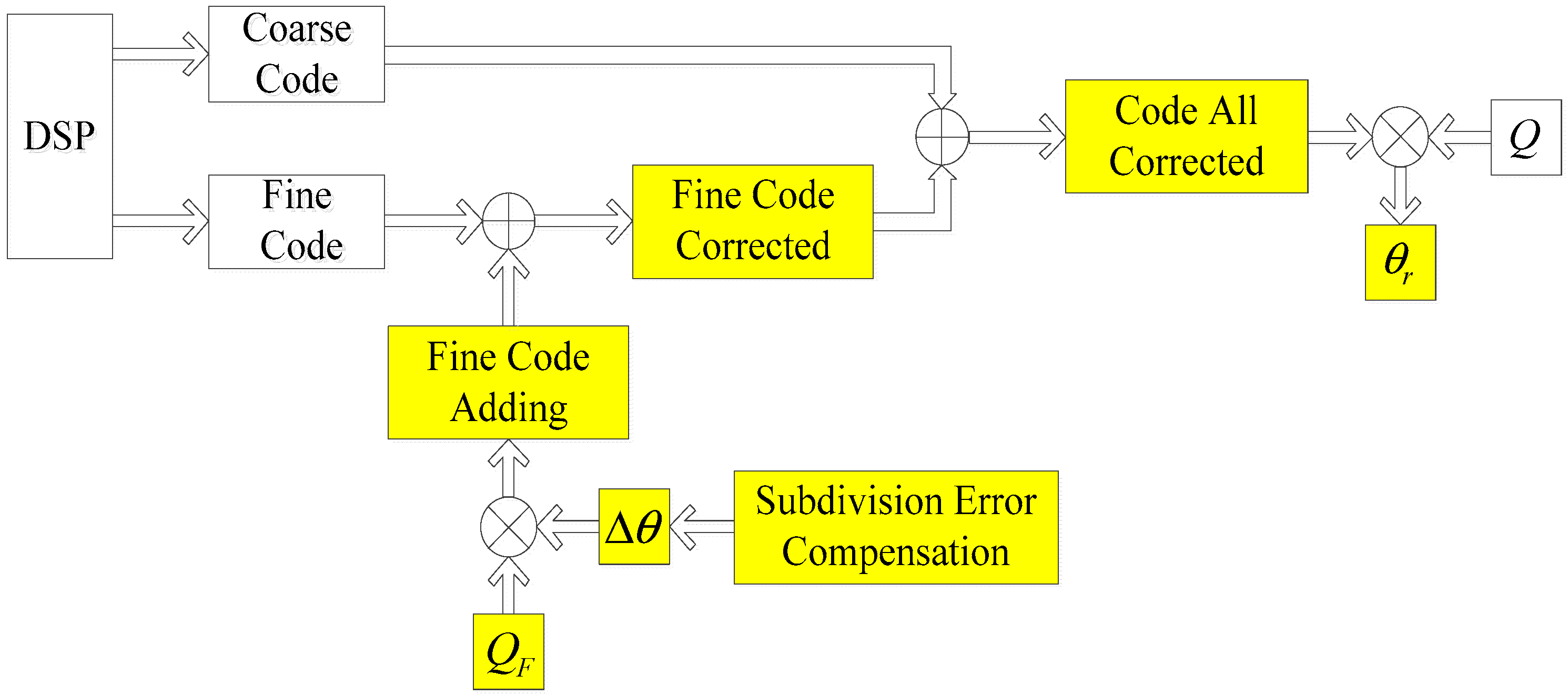
3.2. Compensation Algorithm
- Step 1
- Obtain the data of coarse code and fine code.
- Step 2
- According to the analysis of the subdivision errors, identify the main kind of subdivision error and calculate .
- Step 3
- Calculate the fine code corrected according to Equation (35).
- Step 4
- Finally, calculate through Equations (36) and (38).
3.3. Experiment Set Up
4. Experimental Results
4.1. Results before Adding the Compensation Algorithm
4.2. Results after Applying the Compensation Algorithm
4.3. Results after Introducing the Feed-Forward Loop into the TCS
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jian, Z.; Du, F. The servo control system of KDUST telescope. In Proceedings of the Advances in Optical and Mechanical Technologies for Telescopes and Instrumentation, Montréal, QC, Canada, 18 June 2014; pp. 112–117. [Google Scholar]
- Dindar, M.; Helhel, S.; Esenoğlu, H.; Parmaksızoğlu, M. A new software on TUG-T60 autonomous telescope for astronomical transient events. Exp. Astron. 2015, 39, 21–28. [Google Scholar] [CrossRef]
- Lopez, J.; Artes, M. A New Methodology for Vibration Error Compensation of Optical Encoders. Sensors 2012, 12, 4918–4933. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.-J. Errors and precision analysis of subdivision signals for photoelectric angle encoders. Opt. Precis. Eng. 2012, 20, 379–386. [Google Scholar] [CrossRef]
- Filatov, Y.V.; Agapov, M.Y.; Bournachev, M.N.; Loukianov, D.P.; Pavlov, P.A. Laser goniometer systems for dynamic calibration of optical encoders. In Proceedings of the Optical Measurement Systems for Industrial Inspection III, Munich, Germany, 30 May 2003; Volume 5144, pp. 381–390. [Google Scholar]
- Wan, Q.H.; Sun, Y.; Wang, S.J.; She, R.; Lu, X.R.; Liang, L.H. Design for spaceborne absolute photoeletric encoder of dual numerical system. Opt. Previs. Eng. 2009, 17, 52–57. [Google Scholar]
- Yu, H.; Wan, Q.; Zhao, C.; Liang, L.; Du, Y. A High-resolution Subdivision Algorithm for Photographic Encoders and Its Error Analysis. Acta Opt. Sin. 2017, 37. (In Chinese) [Google Scholar] [CrossRef]
- Wang, X.-G.; Cai, T.; Deng, F.; Xu, L.S. Error compensation of photoelectric encoder based on improved BP neural network. In Proceedings of the 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; Volume 2074, pp. 3941–3946. [Google Scholar]
- Kaplya, E.V. Identification and compensation of static error in the phase coordinates of elements of an optical encoder. Meas. Tech. 2014, 57, 493–500. [Google Scholar] [CrossRef]
- Yu, H.; Wan, Q.H.; Wang, S.J.; Lu, X.R.; Du, Y.C. High-precision realtime angle reference in dynamic measurement of photoelectric encoder. Chin. Opt. 2015, 3, 020. [Google Scholar]
- Gao, X.; Wan, Q.; Lu, X. Automatic compensation of sine deviation for grating fringe photoelectric signal. Acta Opt. Sin. 2013, 33, 0712001. [Google Scholar] [CrossRef]
- Sun, Y. Study on the Interpolation Error Correlation Method for the Minitype spaceflight Photoelectric Encoder. Ph.D. Thesis, University of Chinese Academy of Sciences, Shenzhen, China, 2010. (In Chinese). [Google Scholar]
- Xia, Y.-X. Study on Control Techniques of Inertial Stabilization on Moving Platform; Institute of Optics and Electronics. Ph.D. Thesis, Chinese Academy of Sciences, Beijing, China, 2013. (In Chinese). [Google Scholar]
- Su, Y.; Wang, Q.; Yan, F.; Liu, X.; Huang, Y. Subdivision error analysis and compensation for photoelectric angle encoder in a telescope control system. Math. Probl. Eng. 2015, 2015, 967034. [Google Scholar] [CrossRef]
- Wang, Q.; Cai, H.X.; Huang, Y.M.; Ge, L.; Tang, T.; Su, Y.R.; Liu, X.; Li, J.Y.; He, D.; Du, S.P.; et al. Acceleration feedback control (AFC) enhanced by disturbance observation and compensation (DOC) for high precision tracking in telescope systems. Res. Astron. Astrophys. 2016, 16, 124. [Google Scholar] [CrossRef]
- Tang, T. Acceleration Feedback Control for High precision Tracking Control. Ph.D. Thesis, Institute of Optics and Electronics, Chinese Academy of Sciences, Beijing, China, 2009. (In Chinese). [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kind of Errors | Expression of Errors |
|---|---|
| DC error | |
| Magnitude error | |
| Phase error | |
| Harmonic error | |
| Noise error | |
| Quantization error | × |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Wang, Q.; Zhou, G.; He, D.; Xia, Y.; Liu, X.; Lv, W.; Huang, Y. Analysis of the Subdivision Errors of Photoelectric Angle Encoders and Improvement of the Tracking Precision of a Telescope Control System. Sensors 2018, 18, 2998. https://doi.org/10.3390/s18092998
Yu J, Wang Q, Zhou G, He D, Xia Y, Liu X, Lv W, Huang Y. Analysis of the Subdivision Errors of Photoelectric Angle Encoders and Improvement of the Tracking Precision of a Telescope Control System. Sensors. 2018; 18(9):2998. https://doi.org/10.3390/s18092998
Chicago/Turabian StyleYu, Jiawei, Qiang Wang, Guozhong Zhou, Dong He, Yunxia Xia, Xiang Liu, Wenyi Lv, and Yongmei Huang. 2018. "Analysis of the Subdivision Errors of Photoelectric Angle Encoders and Improvement of the Tracking Precision of a Telescope Control System" Sensors 18, no. 9: 2998. https://doi.org/10.3390/s18092998