1. Background
Developments in life expectancy, disability awareness, and the support for independent living has altered how users, who may require care, are provided that care. Independent living with remote care provision and support are highly sought goals in caring for those who need it today and in the future. Background support enables those in need to go about their daily life knowing that help is there if required, giving people the confidence to go about their normal daily lives. Ambient assisted living (AAL) is a significant area of research and development aiming to apply ambient intelligence technology, enabling those with varying care needs, such as older persons, to live in their preferred environment for longer and safely [
1,
2]. ECS systems can use different types of sensors to monitor the movement and daily health aspects of users requiring remote care. These sensors can be classified into two groups;
sensors, which are at fixed at a particular location, e.g., passive infrared (PIR) sensors, vibration sensors, pressure sensors, cameras, and microphones; and
mobile and wearable sensors, e.g., accelerometers, thermal sensors, and pulse oximeters. Sensing based investigations for example, received signal strength indicator (RSSI) to localize people [
3,
4], acoustic sensor to localize animals [
5], and adaptive rejection sampling (ARS) for target navigation are gaining popularity [
6].
There are several sensors or sensor combinations available. Currently there are plentiful ECS systems implementing various tasks, such as fall detection [
7,
8], mobile emergency response [
9], video surveillance [
10], automation [
11], monitoring activities of daily living [
12], and respiratory monitoring [
13]. These attempts can increase the safety and independence for the elderly life. In addition, there are several protocols existing to deliver older care services, which uses multiple sensors with machine learning algorithms to get health status of a person and some of these systems could be operated remotely. Tsirmpas et al. created an AAL system to classify various activities from the data generated using accelerometer. They have made profiles of activities from accelerometer data and classified the profiles using self-organizing map (SOM) and fuzzy C-means (FCM) algorithms [
14]. Costa et al. constructed a care system to detect falls and health condition using multiple wearable devices for old people which supports mobility. The system uses a chest band, a smart shoe, and an accelerometer enabled smart phone simultaneously to obtain bio-signals and generates notification for the occurrence of any abnormalities [
15]. Yao et al. modeled another fall detection method in the context of AAL with the help of Kinect depth sensor (D sensor) and machine learning. The RGB video was collected for humans by enabling D sensor which provides the skeleton data (coordinates of joints) and classified using interval type-2 fuzzy-logic-based systems (IT2FLSs) to track the behaviors of people in home [
16]. Diamantini et al. employed a formal language approach to form a requirements elicitation system for AAL and an ontology of elderly people’s daily behavior. The system divides the tasks and implements logical reasoning to support the ECS [
17]. Alcalá et al. and Lopez-de-Teruel et al. created a non-intrusive ECS employing a smart meter and artificial intelligence. The model gathers the power consumption from houses of healthy elderly residents and analyzed appliance power usage probabilistically with the help of Gaussian mixture model and the Dempster-Shafer theory. This system creates notifications to check on a person’s condition when power consumption deviates from usual usage, because this deviation may indicates a change in a normal routine [
18,
19]. Bleda et al. proposed an ECS by using smart sensory furniture (SSF). The experiment conducted in an elderly care home where the sensors are embedded with furniture to explore the interaction of people with their furniture and make a protocol for providing safety, prevention, and elderly care services. Specifically, this work added a middleware in their previously built infrastructure to provide an elder care facility [
20]. Hassan et al. assembled a cloud based hybrid approach to take care of elderly people. The model used several ambient sensors including CCTV videos together to analyze patient’s condition. Then, the data was classified using Weka machine learning tools to take decisions about health status and generate alerts for any abnormal pattern found from the house [
21]. Barsocchi et al. presented models where abnormal situations were detected through swarm intelligence and a marker based indoor navigation system [
22] by implementing three models CPS [
23], n-Core [
24], and RealTrac [
25] evaluating AAL Systems through Competitive Benchmarking (EvAAL). Diraco et al. created a prototype to monitor the health condition of older people using IR-UWB phenomenon when they were alone in their home. This work focused on AAL by measuring vital signs (heart rate and respiration rate) and fall detection. Subsequently, the data obtained from the UWB device were classified by supervised and unsupervised machine learning algorithms to identify unexpected and potentially dangerous situations [
26]. Chernbumroong et al. published work on an experiment to detect of Activities of Daily Livings (ADLs) of an older person via wearable, inexpensive, and non-intrusive wrist worn sensors. The data were classified by multi-layer perceptron (MLP), radial basis function (RBF), and SVM to classify the activities to aid understanding of unusual conditions [
27]. Fleury et al. performed experiments in health smart homes to categorize ADLs using SVM. Different classes, such as sleeping, toilet use, hygiene, resting, communication, eating, and dressing/undressing), were considered for the test [
28].
1.1. Scope
Generally, care systems require context aware information, e.g., indoor location, activities, and contact timings of a person with furniture or other object to understand the lifestyle of users through machine learning or manual processing. Most of the existing care systems use wearable technologies to obtain context-aware information from the home environment. However, wearable devices are nowadays criticized for their low battery life and user dissatisfaction. Moreover, the devices face problems such as, coverage area, bandwidth, and integration with existing infrastructure. Smart phone sensors (e.g., accelerometer, received signal strength indicator (RSSI)) face a crucial disadvantage of the recalculation of signal strength at the time of environment changes, where cellular devices are not reliable because of altering signal propagation in different conditions and the fact that they might be left behind by the user in a single room when not in use. The systems based on non-wearable devices e.g., smart meters, smart furniture, and video tracking also suffer from the problems such as, cost of installation, maintenance and for example with smart meters, information only available every 30 min or so.
1.2. Contribution
The health care domain requires technologies which are acceptable to the user, cost effective in terms of overhead and data, and easily maintainable. The proposed work has chosen UWB as a fruitful and powerful method to accommodate drawbacks of the existing algorithms. The UWB radar used for the proposed work, functions as a non-intrusive biosensor detecting physiological movement in a noisy or multipath environment. The experimental setup has been made in a real home environment, which is connected via an Internet of things (IoT) platform, and brings much greater intelligence and understanding to identify a person’s condition (static or dynamic) over time and provides an assistance route via remote access control when needed. The work is an extended version of [
29,
30], where the initial work focused on to an automated UWB localization framework based on supervised machine learning and the second aimed to recognize vital signs (respiration and heart rate) during different daily activity types via UWB radar response. The proposed work here has extended those previous works above to an ECS improving AAL by developing trigonometric approach in accordance with radar principles and machine learning. This paper presents a new intelligent ECS mechanism via device-free passive (DfP) indoor localization [
31] method where persons do not need to carry any devices nor join-in centralized infrastructure. In addition, it is robust to changes in the environment, does not need frequent manual care or reconstruction, which reduces huge overhead. The main contributions of this work are as follows:
A pilot study has been performed in a real home environment with the presence of a person. Data have been collected for different types of activities via UWB radar and video surveillance (to ensure correlation of finding) to understand the "habitual" position through the daily activities.
Radar principle has been employed to measure the range, and a new method has been proposed to calculate the azimuth angle or angle of arrival (AoA) from the pulse propagation delay in accordance with the time-stamp to identify the locations. Consequently, the experiment can explore the actual position of the person in different times, which would imply a normal movement.
Subsequently, the raw data have been processed using short term fourier transform (STFT) to understand the frequency signature of an action. The frequency distribution of an activity along with the range, azimuth, and time-stamp of the movement have been labelled by the recorded evidence and made the ground-truth information.
Subsequently, a multi class support vector machine (MC-SVM) has been trained and tested including the time-stamp of the daily "habitual" positions in that indoor scenario to make the system automated.
The proposed method has been validated via statistical metrics and is shown to achieve over 90% accuracy.
The remainder of the paper is organized as follows.
Section 2 highlights the methodology proposed and provides details regarding the time-frequency analysis along with the classification algorithm.
Section 3 discusses the experimental set-up and detailed data acquisition process. In
Section 4 the results obtained through frequency signature, classification, and validation process are presented.
Section 5 concludes the paper and provides the future research directions of this work.
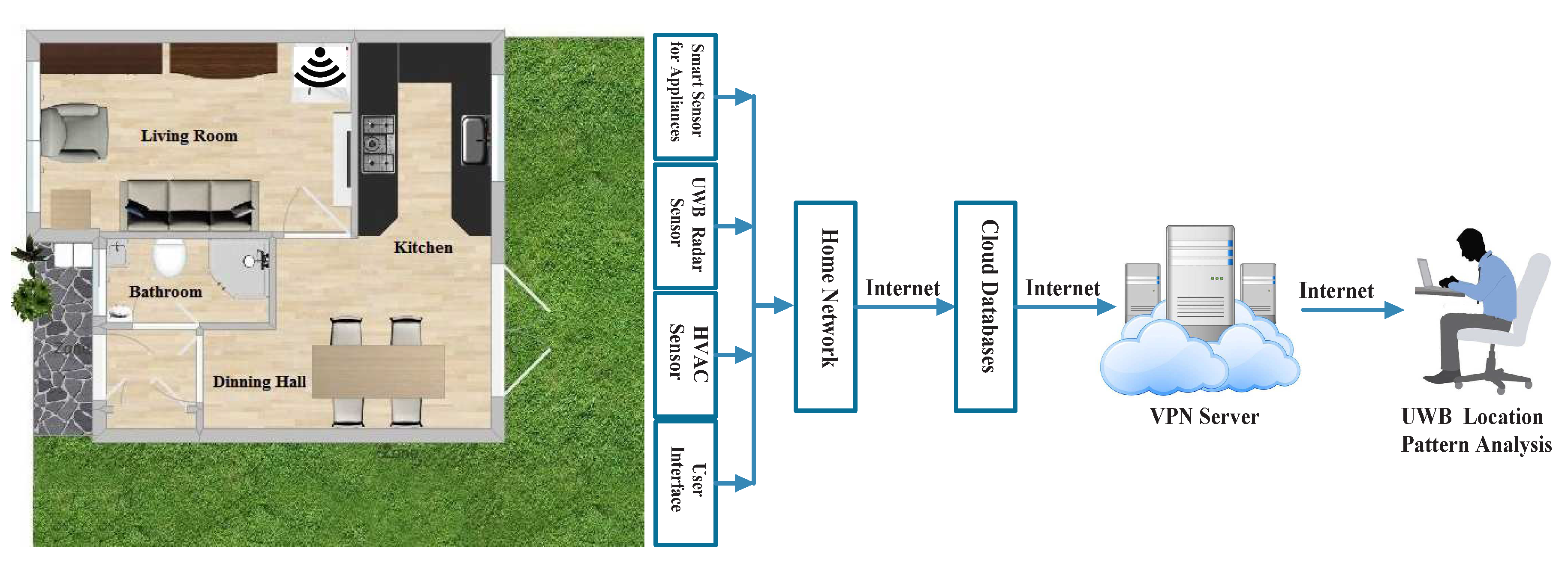
3. Experimental Setup
The previously outlined experiment has been carried out on the ground floor area of a semi-detached house located in Essex, UK, where the house is connected with several open source IoT devices such as smart and legacy appliances, sensor nodes, UWB platforms, user interface, and smart thermostat devices, etc. based on previous work presented [
38]. Here, only the UWB platform is considered for this work. The ground floor plan, shown in
Figure 2, comprises four rooms: Living room, kitchen, dining room, and a bathroom. The single monostatic UWB device is fixed towards the back corner of the living room. The data is accumulated with the presence and absence of a single person where the remainder of the environment is assumed static. The data are then collected and stored into a cloud database through middleware server architecture [
39]. Later, the data are pre-processed, analysed, and transformed by a STFT and used to train the MC-SVM about the location information of the ground floor. Hence, the trained prototype could predict location of the future activities.
A Time Domains PulsON 410 (P410) UWB hardware module (shown in
Figure 3) is used for the data acquisition purposes. It is a short-range radar with 1.4 GHz of Radio Frequency (RF) bandwidth. This P410 commercial radar module, embedded with in-house developed software was connected to a Raspberry-Pi (RPi) for storing the time stamped radar data. The data have been analyzed and classified offline to compare with ground truth information and correlate the findings. The module transmits at an RF centred frequency of 4.3 GHz with a bandwidth of 2.2 GHz, which follows the Federal Communications Commission (FCC) restrictions [
40]. The parameters considered for this experiment are included in
Table 1. The pulse integration index (PII) is configured to 12, which is able to integrate
pulses for a symbol and can provide improved signal to noise ratio (SNR). This device produces base-band pulses of very short duration [
41] and transmits pulses at very safe RF levels (−44 dBm/MHz). With appropriate design and signal processing, it can additionally behave as a biosensor and has the added wireless advantage of being able to penetrate through different materials or obstacles so has multiple room effectiveness. In our case, the finite impulse response (FIR) filter is used for the device settings. A 4-tap difference FIR filter has been implemented by convolution for each pulsed wave on each bin where the device takes the first 100 pulsed waves to adjust the filter coefficients and accommodate the background noise. Thus, a 100 data point moving box has been determined by taking each data point from the waves and calculating their average and standard deviation. A detection has been reported by the device when it finds new data with greater average and standard deviation. It has the TW-TOF ranging mechanism that provides precise position information within the short communication range. The single monopole antenna of the radar device set up employs 65 ns TW-TOF which provides an 8 m path radius in all directions. The first 5 ns of the waveform contains jitter because of the direct path interference between the transmitter and receiver antennas. The scan interval is set to 25,000
s and scans are requested after each interval. The device has a sampling frequency of 16.39 GHz, and a pulse repetition interval (PRI) of approximately 100 ns. The radar performs a scan after each scan interval, which is a function of integration rate and size of scan window. The experiment is carried out using Matlab R2017a tool on an Intel
Core
i7 processor @ 3.60 GHz running Windows 7 Enterprise 64-bit operating system with a 7856 MB NVIDIA graphics processing unit (GPU).
4. Result Analysis
Within the home environment under test, nine distinct activities have been considered to identify locations and frequency. This experiment was carried out without local information, but a diary and webcam were used to align outputs post processing to confirm the UWB radar and MC-SVM experimental findings. A single day is considered here to carry out the experiment. There are nine types of radar events processed to represent typical daily household works to be considered for this offline classification task. These nine types of radar events are transformed through STFT to determine the frequency and phase content of scan local sections which varies over time.
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12 describe these events in terms of propagation delay or fast time and frequency over the local sections of a pulsed wave. The propagation delay, or fast time in the current settings, is 65 ns where first 5 ns contain jitter, thus the pulse can travel
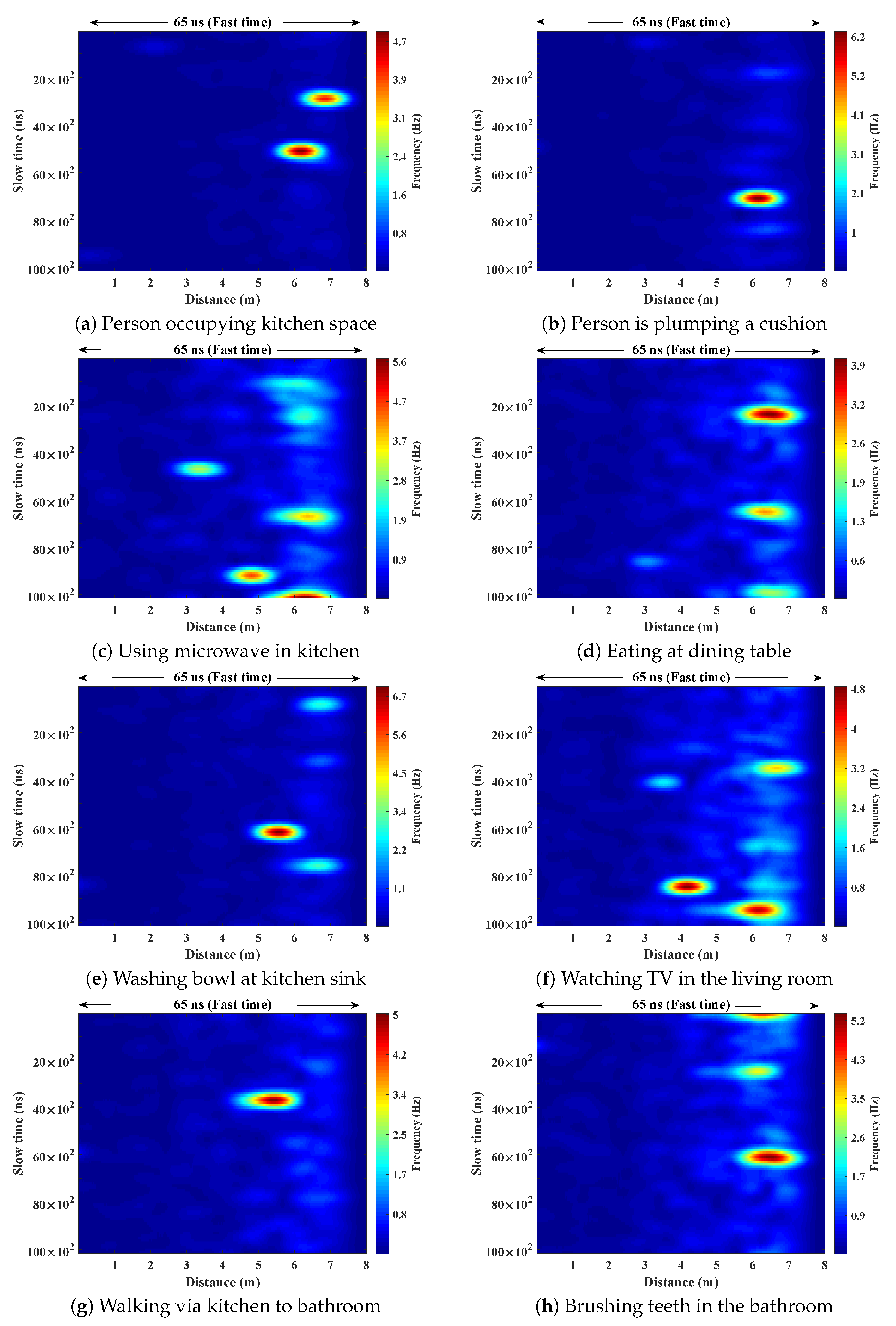
m with the 60 ns delay. Practically, the radar covers 8 m with this fast time. Moreover, the distance calculation from the micro Doppler signature for each case is shown in
Figure 13a–i for better understanding of the scenarios. For each situation, 100 received scans are plotted and color is mapped for visualization, where the highest activity levels have the strongest reds (plumping cushions is red color, sitting still and watching TV are blue color). The slow time or PRI (stated in
Table 1) between two pulse is approximately 100 ns, thus total
ns of slow time have been labelled in
y-axis and 8 m of distance has been marked in the
x-axis.
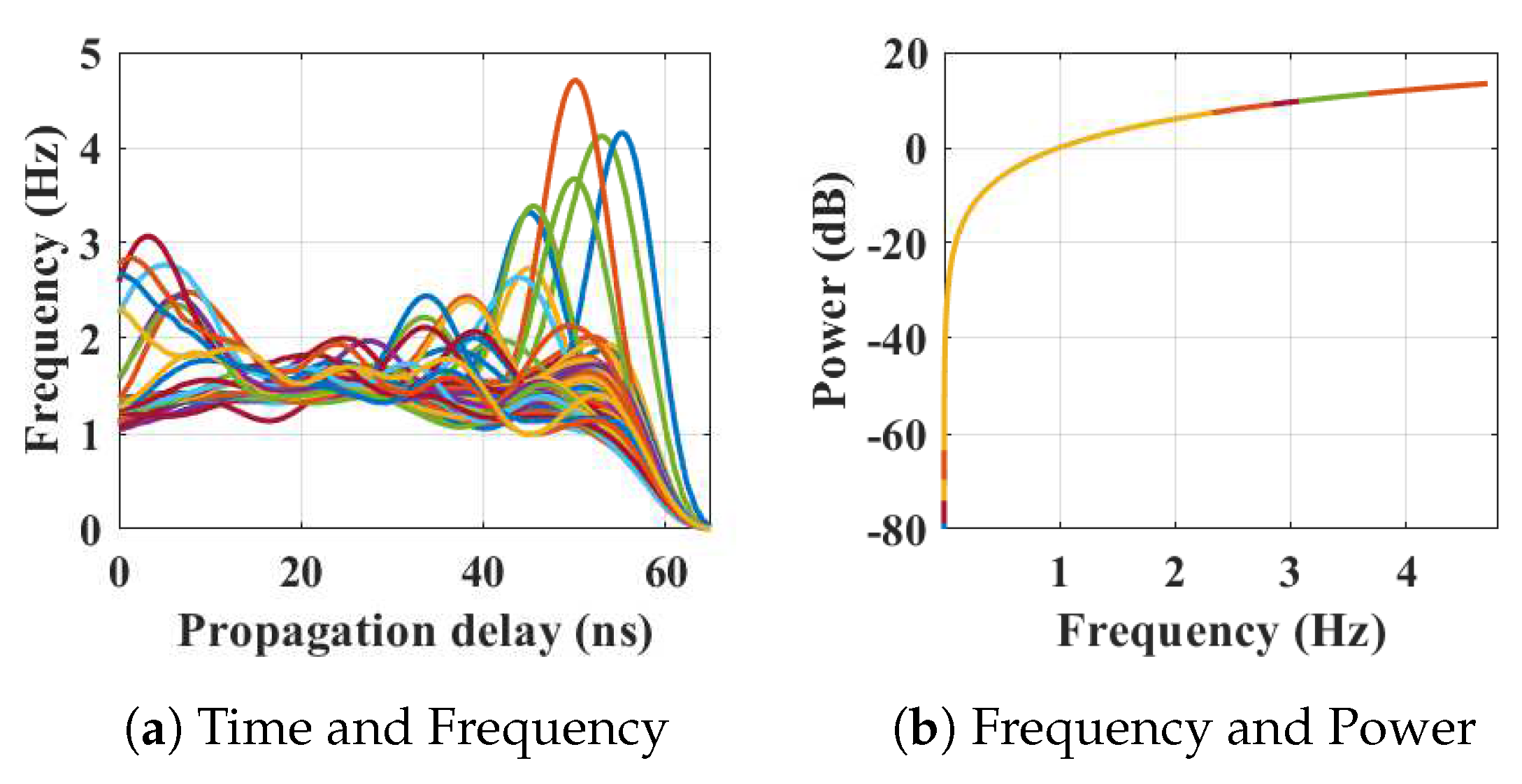
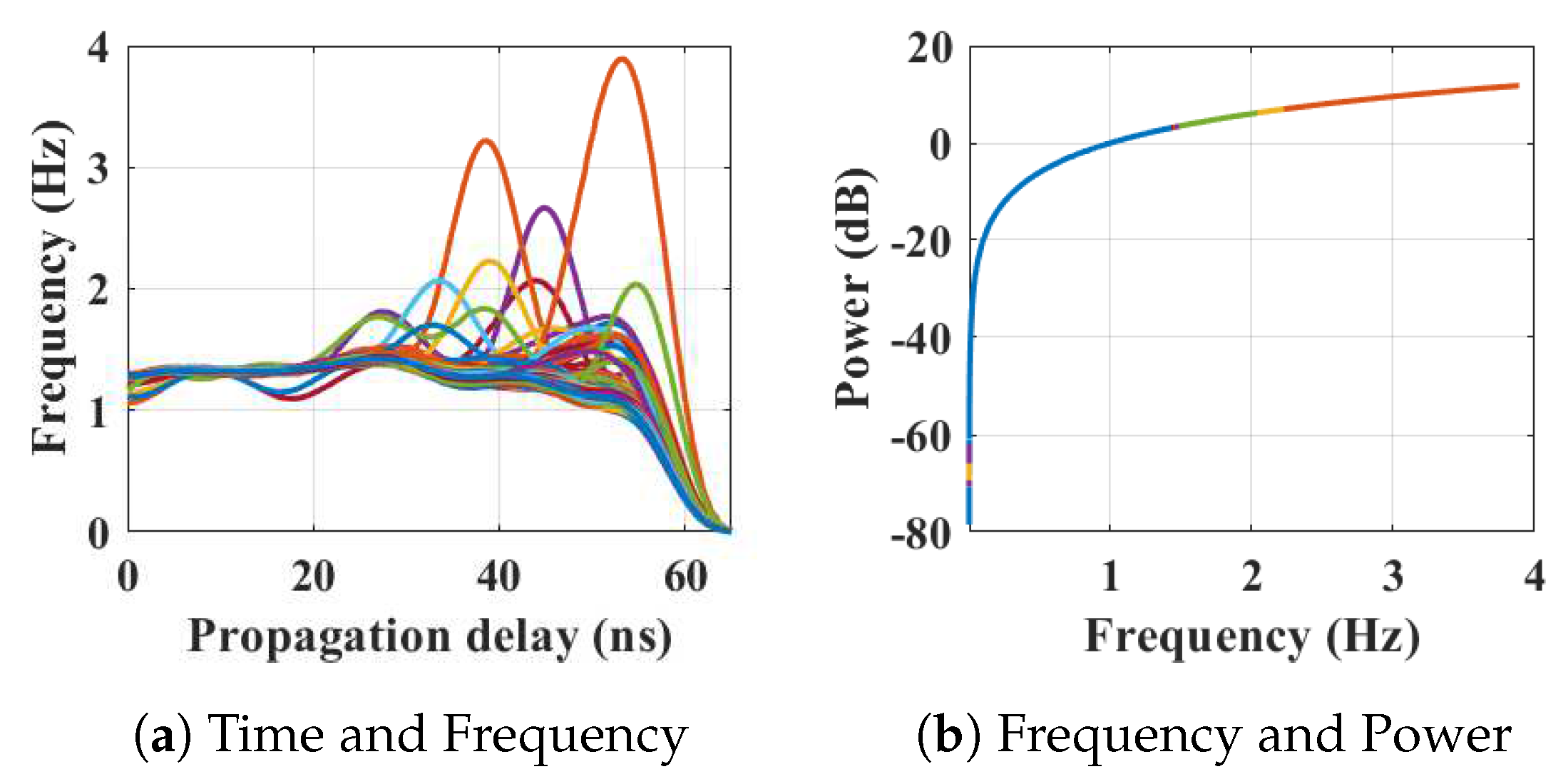
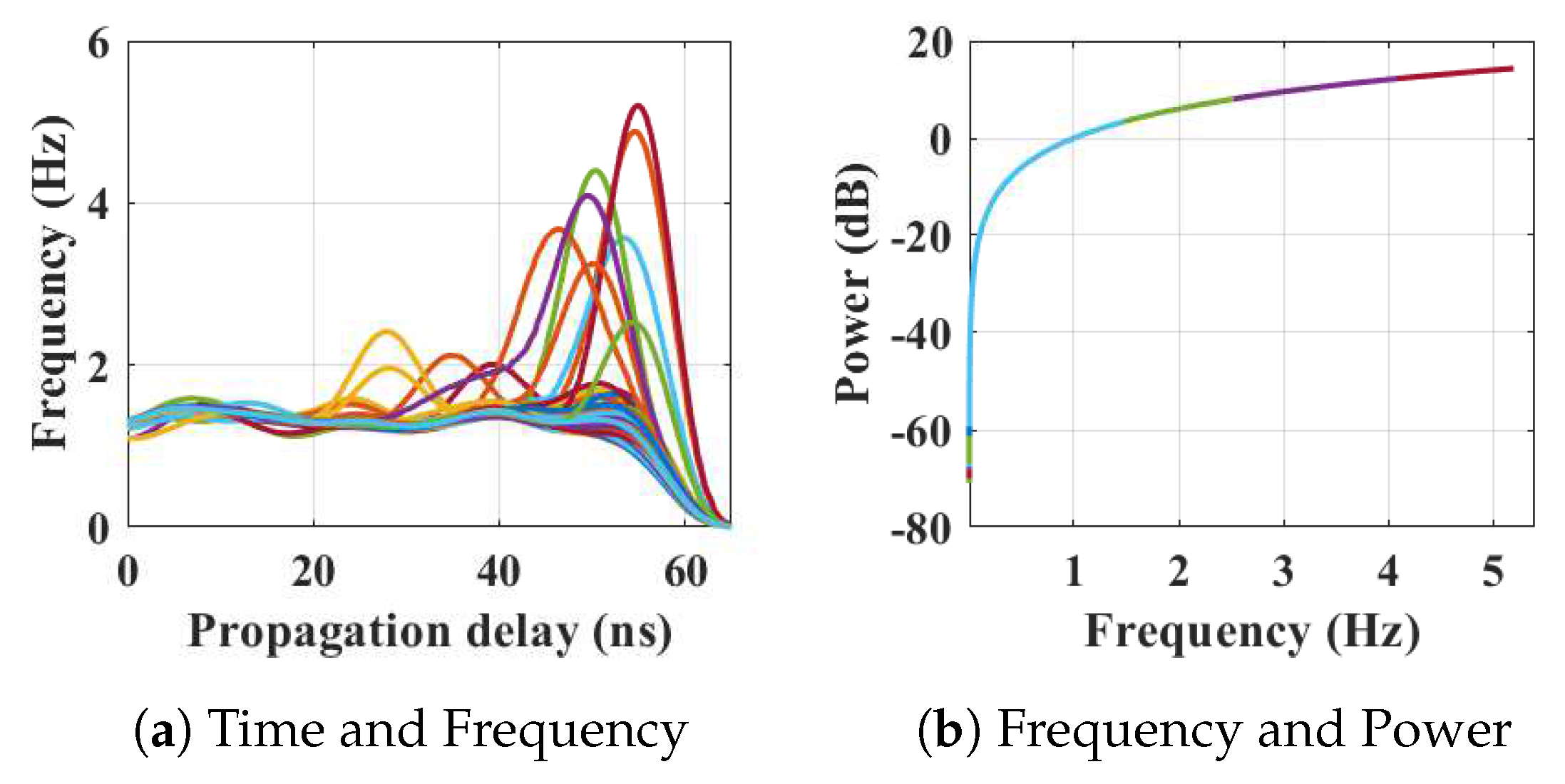
Figure 4 shows the results when the person is occupying the kitchen space.
Figure 4a shows the frequency content of the scans with respect to the time of arrival (ToA), where the frequencies reached 4.7 Hz during movements in that space. The actual position of the person is shown in
Figure 13a which is approximately 7 m from the radar with an azimuth of
agreeing with the kitchen floor plan.
Figure 4b shows the energy spectrum of that situation.
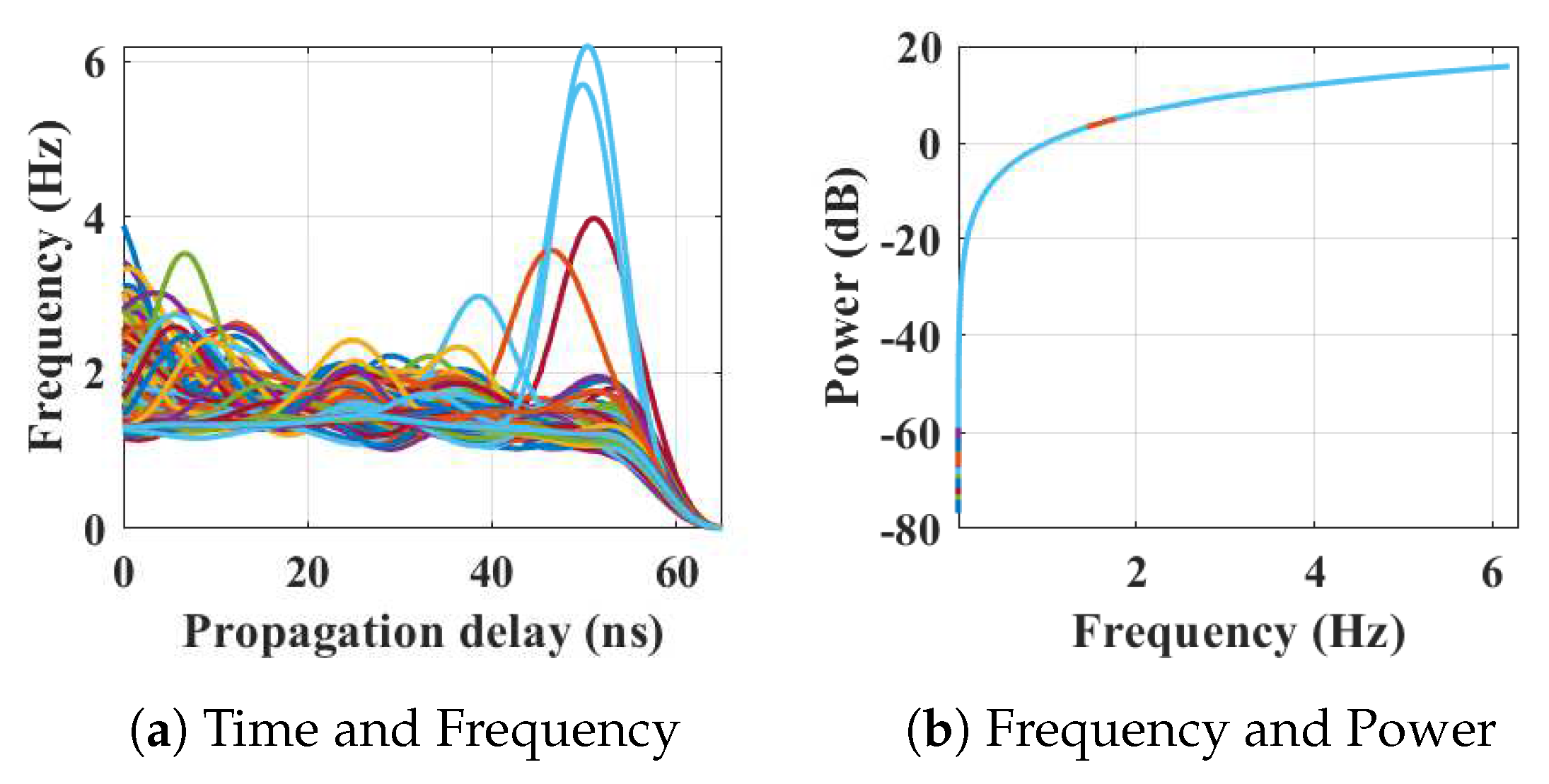
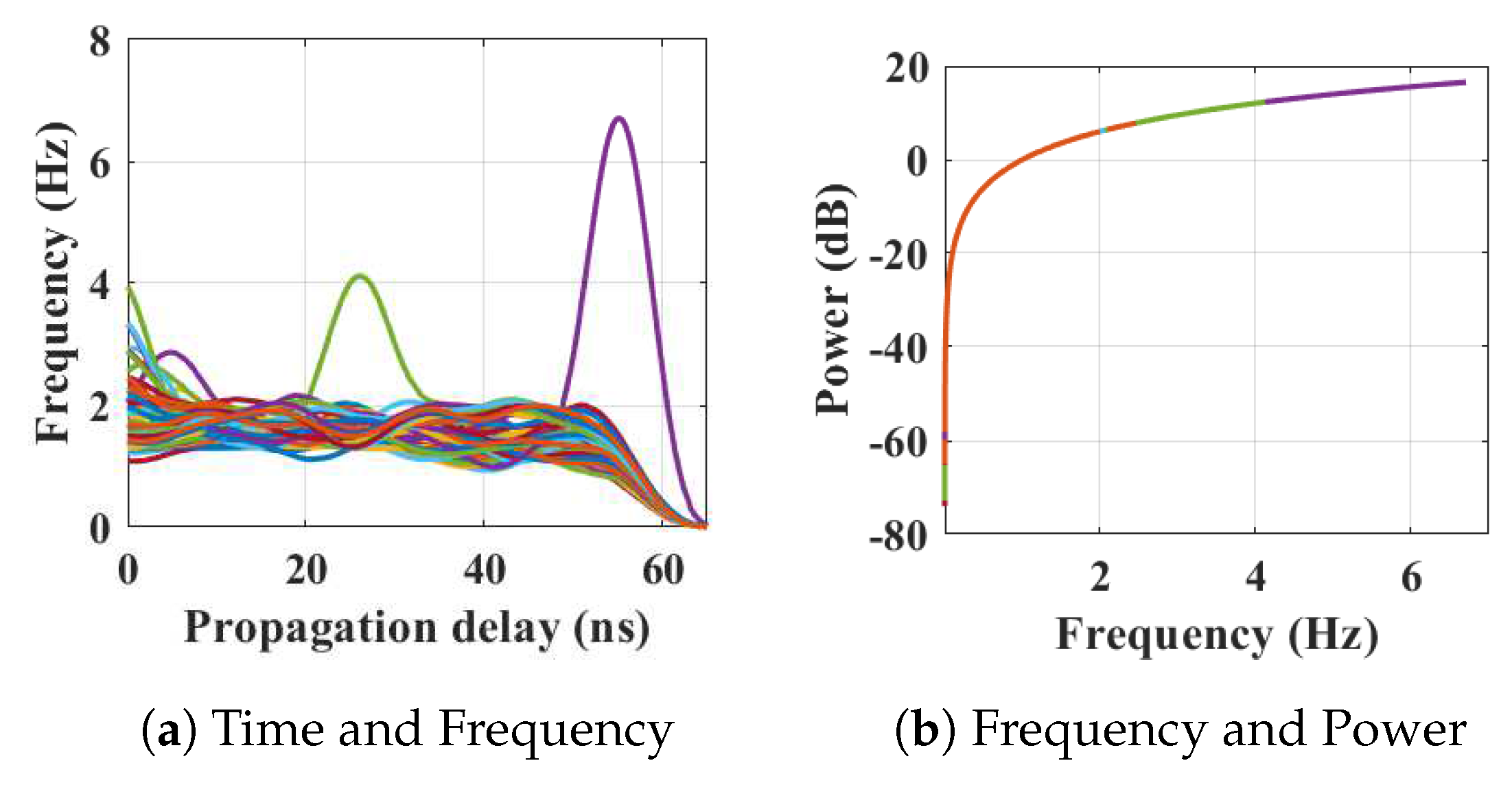
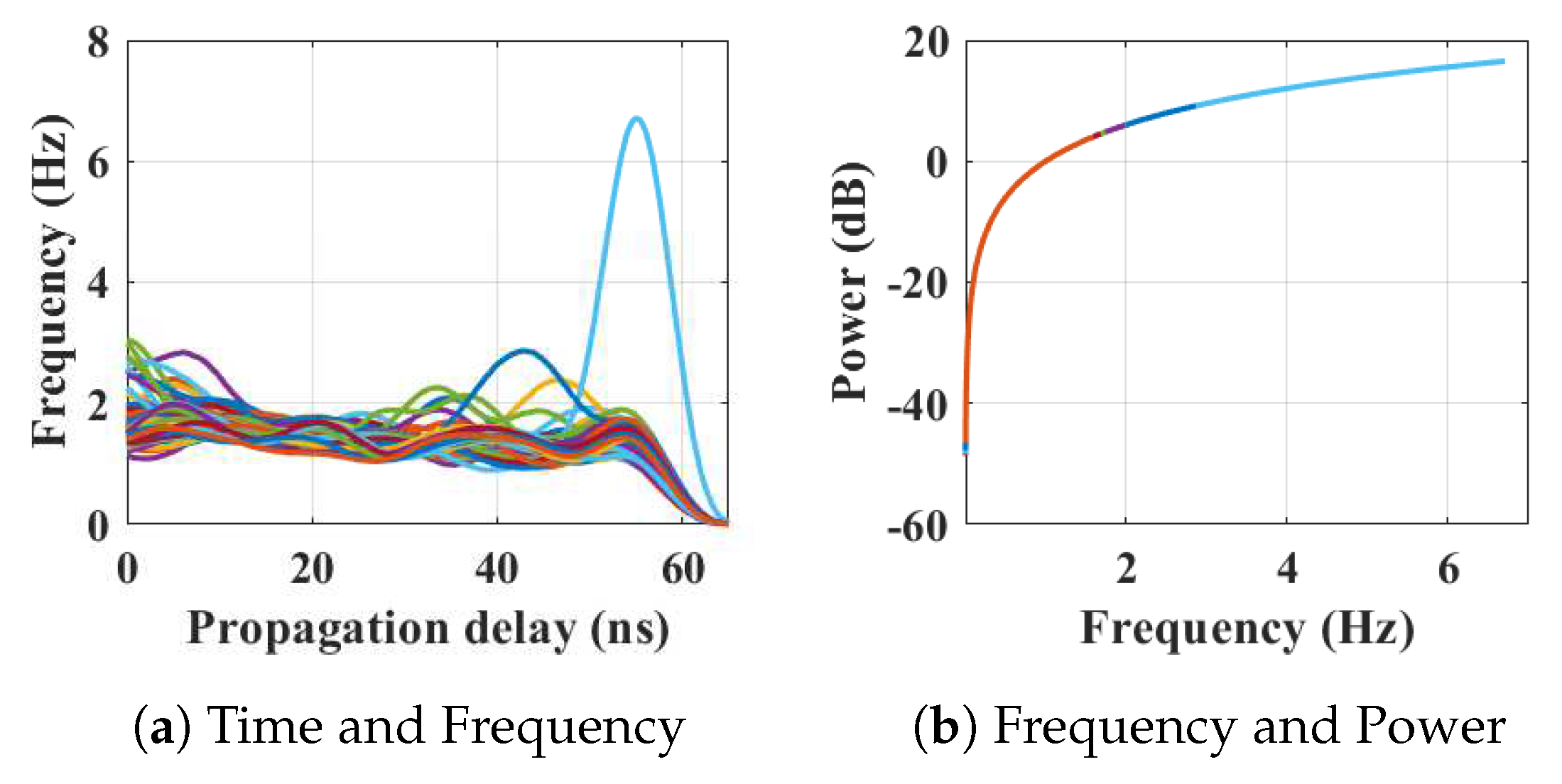
Subsequently, the person entered in living room after leaving the kitchen.
Figure 5 represents the results from the entry and movements in the living room. The participant is asked to carry out typical actions such as, sweeping, dusting, etc. Plumping the cushions for example has the highest frequencies of around 6.2 Hz, where other works (dusting) repeatedly have frequencies under 4 Hz, as shown in
Figure 5a. The energy spectrum in
Figure 5b displays the power approximately equal to 10 dB. The 2D image plot
Figure 13b, shows the frequency contents of these scans with a distance map, where the red color area indicates the position of the person approximately 6.5–7 m away from the radar with an azimuth angle of
.
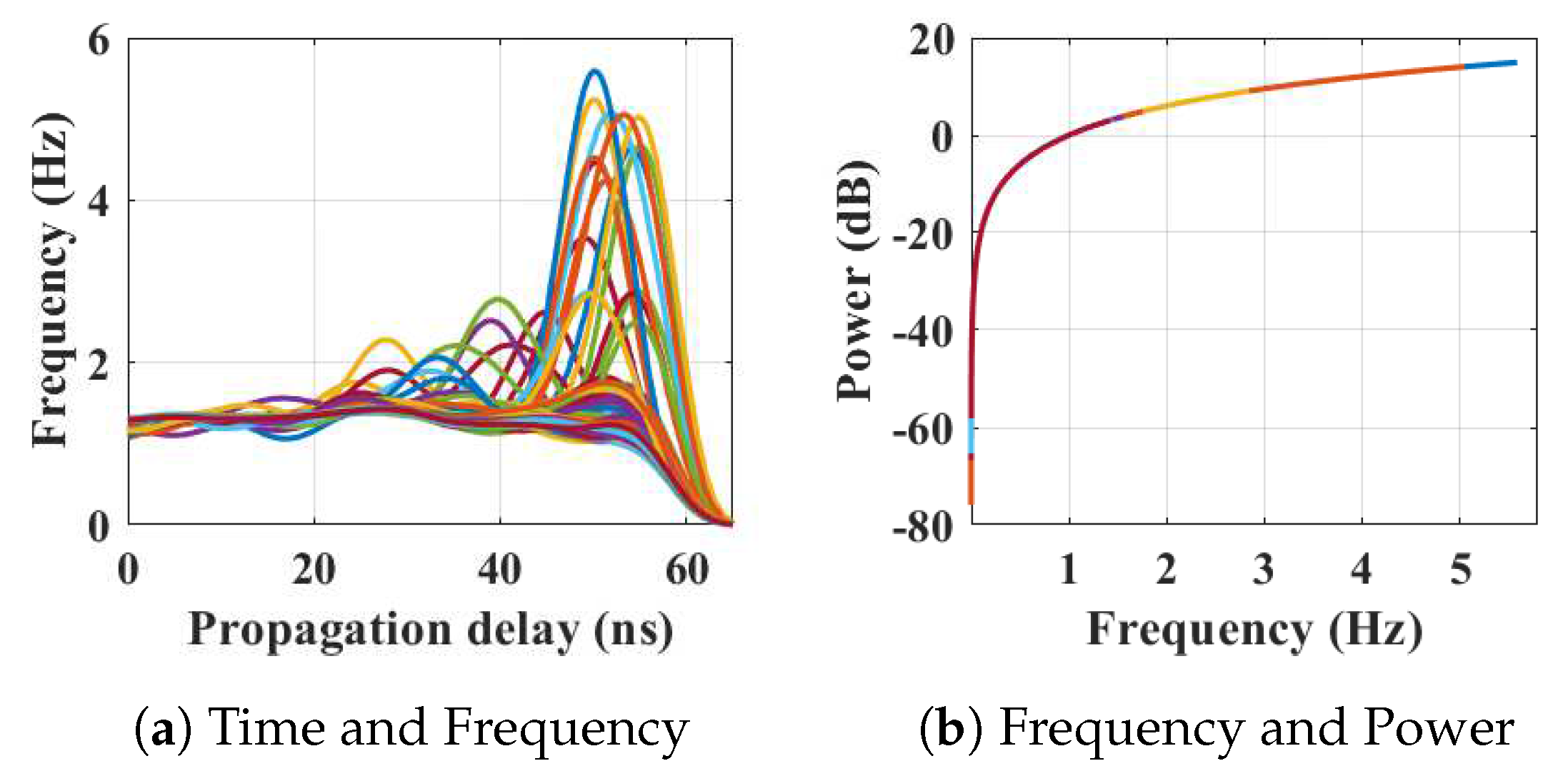
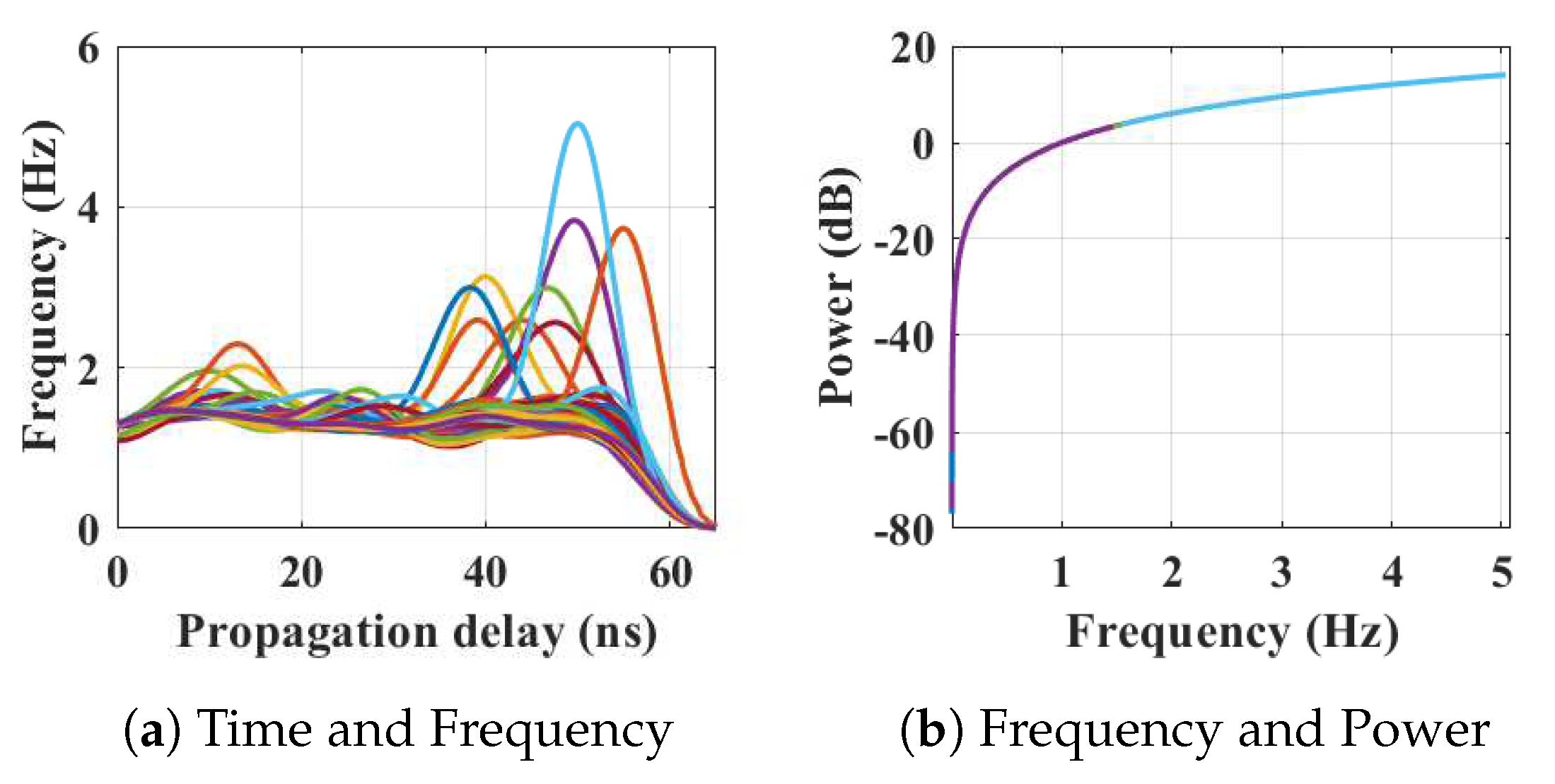
Subsequently, the participant entered the kitchen again from the living room via the dining room and began to use the microwave oven; indicated in
Figure 6. The received frequencies are up to 5.6 Hz in this case. The distance and azimuth angle are determined through the time vs frequency analysis of
Figure 6a. The color map shows that the person is moving between 3–7.2 m over that time period with different azimuths when the corresponding energy expenditure is approximately 18 dB (shown in
Figure 6b).
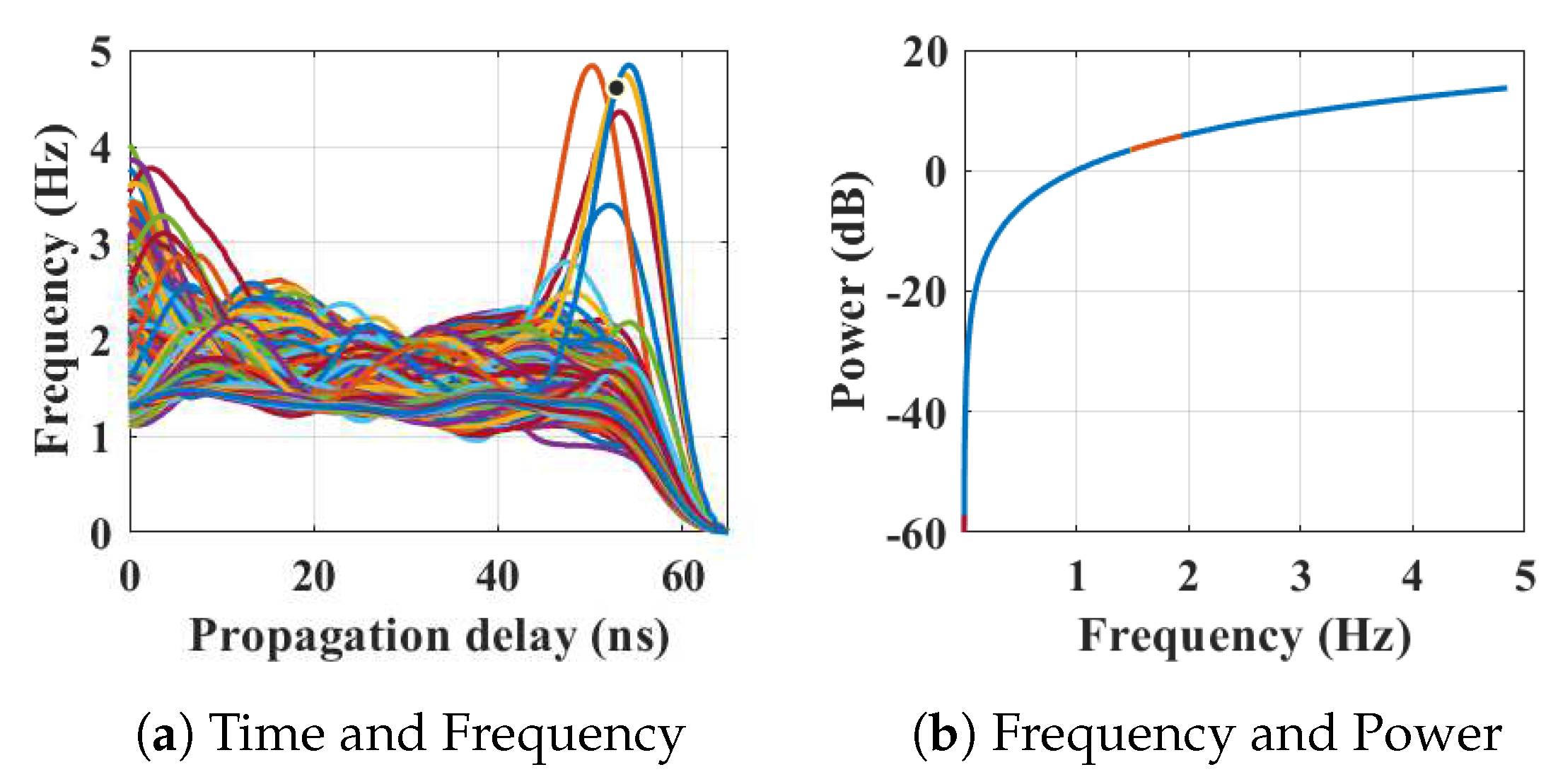
After finishing in the kitchen, the person moved to the dining area to eat at the dining table, where the movements are indicated by peaks in
Figure 7a and the corresponding energy spectrum is shown in
Figure 7b. It is reflected in the
Figure 13d that the movements of the person have the frequency up to 3.9 Hz, but the position and azimuths are approximately the same when the time has changed.
After finishing eating, the person went to kitchen for washing up ppliances. The transformation of scans is shown in
Figure 8.
Figure 8a represents the time and frequency analysis of the waveforms when the person is washing at the sink. The distance between the person and the radar is roughly 6 m at that time (shown in
Figure 13e) with an angle of
from the north face of the radar. The corresponding energy is displayed
Figure 8b is 19 dB. Further work is ongoing to identify the actual signature of washing up and eating and this would have a dramatic impact on the area of assistive living and monitoring.
Following that, the person moved to the living room from the kitchen and started watching television while sitting on the sofa. The radar events are specified in
Figure 9. Here, the frequency responses of below 0–2.5 Hz due to lack of movement at the time of watching television. Sudden movements (e.g., retrieving the remote control) occur during that testing time results frequency contents between 2.5–5 Hz (shown in
Figure 9a) are also observed.
Figure 9a shows the position of the person is between 3.5–7 m.
After a while, the person left the living room and moved through the hallway entrance towards the bathroom. The transformation of scans and their peaks of the
Figure 10a indicates the walking frequency of the person around the house at that time with a different azimuth.
Figure 13g represents the frequency with respect to distance.
In the next scenario, the person went to the bathroom for brushing teeth. The received scan responses are analyzed and plotted in
Figure 11a. The person is roughly 6–7 m (shown in
Figure 13h) from the radar with an azimuth angle of
.
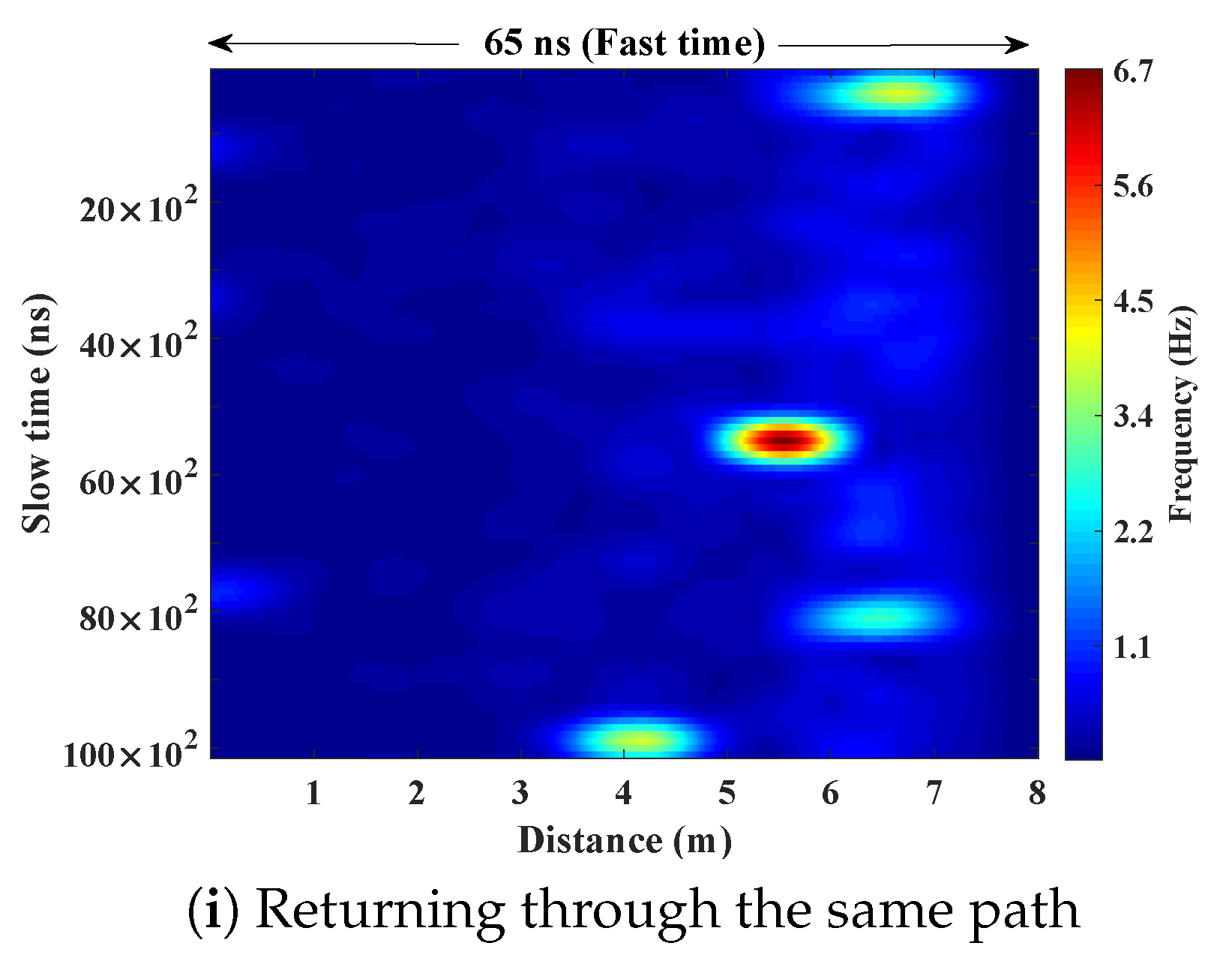
Finally, the person moved through the corridor from bathroom to the living room, and the radar responses are analyzed to extract the frequency contents for that, shown in
Figure 12a. At that time, the distance of the person from the radar is approximately 7 m. Comparatively high frequencies are shown in the frequency and distance plot of
Figure 13i.
Each of the raw scans contains 1152 amplitudes. Pre-processed and transformed scans contain frequency variations of the respective actions with 1064 data points assuming no jitter. Physically these frequencies represent different actions within 8 m, which needs 65 ns of TW-TOF, as shown in
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13. Subsequently, these scans have been transformed to create the feature vectors to train the chosen supervised machine learning (ML) method. The nine categories which have been considered for supervised ML are included in
Table 2. Each of these events have been represented by range, azimuth, and frequency of the action and considered the combination as features for the ML phase. Three hundred and fifty-five frequency data points have been extracted after STFT and determined range and azimuth for each of these frequencies. The feature vectors aim to represent an event with its frequency, distance (range) from the radar, and AoA of the pulses. Thus,
lengths of feature vector have been formed from each radar pulsed scan to describe an event. Thus, the final feature vector from each scan has been considered as
.
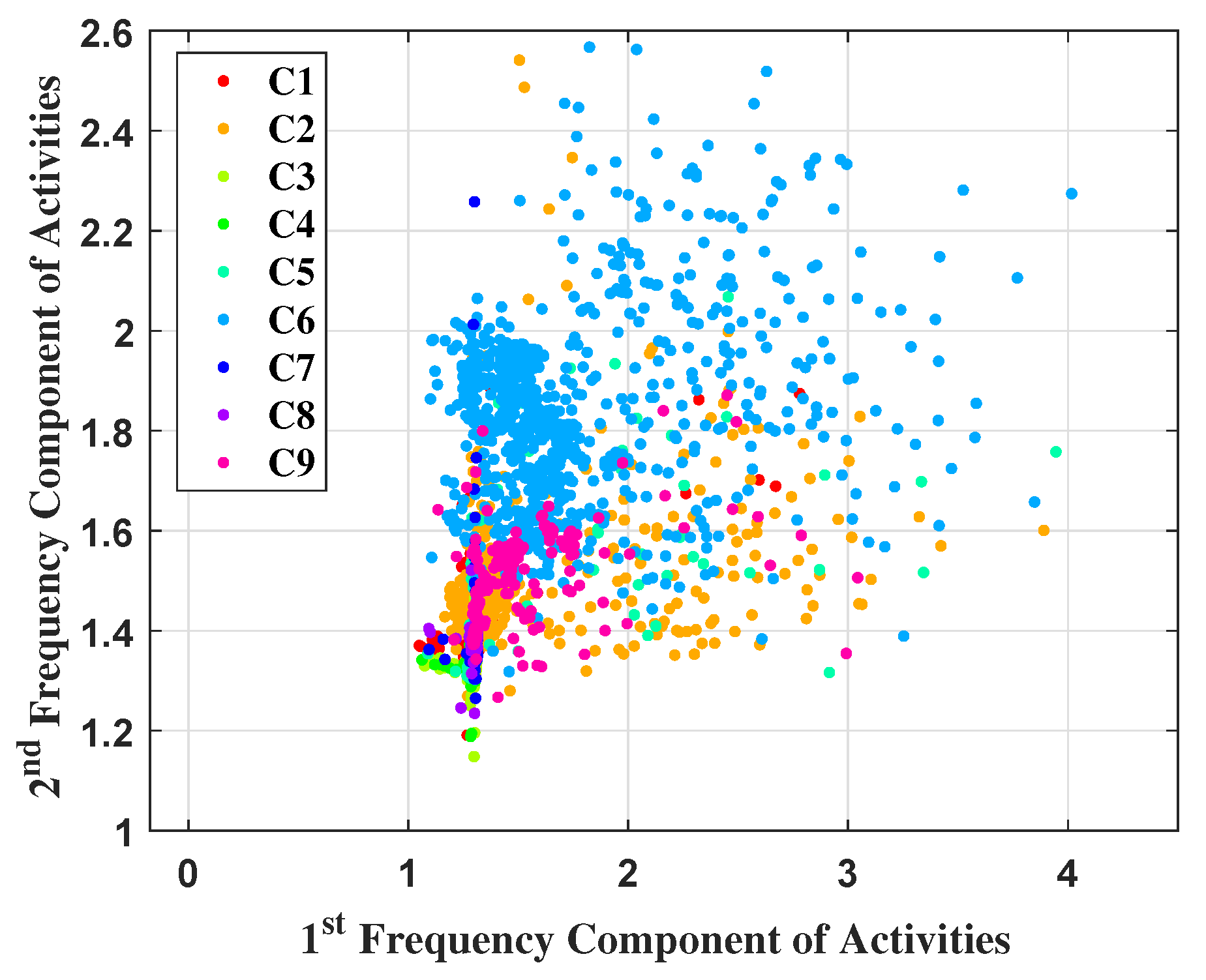
The data prior to ML technique selection have been visualized in
Figure 14. It demonstrates a two dimensional representation of the feature vector, where only first two features (
and
) have been plotted. Physically these two features demonstrate frequency variation of an activity at distances of 0.0091 m and 0.0183 m. The
x and
y axis of
Figure 14 have been labelled for better understanding. It has been found that the data is distributed in a way which cannot be classified by any linear functioned ML. Therefore, the MC-SVM with quadratic kernel has been chosen, which provides a non-linear decision boundary for classification which has been found to work very well for the situation under investigation. The data have been classified by MC-SVM and outcomes illustrate its capability to predict the locations. The categories C1 to C9 have been described earlier (in
Section 4. The 2D plot shows the feature values are very close to each other for some cases, although they belong to different classes.
This imbalanced data distribution makes the classification task difficult for some categories, which is reflected in the confusion matrix later. The data have been randomly partitioned into the training and testing sets. The amount of training data has been altered from 10% to 40%, when testing data amount is 90% to 60%. Each time, the algorithm has been trained by these percentages, tested, and validated by the remaining data. The prediction results have been validated by statistical metrics and entered in
Table 3. The averages are taken for each metric and listed here. It shows that the proposed predictive model provided the highest testing correction rate of 0.9047 (marked in bold) and lowest error rate of 0.0953 for the 30% percent training data level.
The testing correction rate increased from 0.8932 to 0.9047 for 10% to 30% training data. The amount of training data was increased with the expectation that accuracy would increase. However, with the 40% training data, the algorithm has over-fitted due to the high dimensionality of the feature vectors, resulting in the testing accuracy decreasing to 0.8963 and the error rate increasing to 0.1037. The objective of the proposed method is to fit the model with the dataset so that it could make valid predictions on new data. Therefore, the performance of the proposed algorithm at 30% training data is considered as the optimal performance of the model. Other evaluation parameters are also determined to support the robustness of the model. In this case (30% training and 70% testing data), sensitivity 0.9038 of the proposed model indicates the probability of correctly identifying the location of the person. Additionally, specificity of 0.9941 tells the probability of the system to recognize the scenario accurately when there are no activities happen in a room. The positive predictive value (PPV) of 0.9695 signifies the probability that the system gives positive results regarding a person’s location from a specific activity, and the true occupancy of the person, and also the negative predictive value (NPV) of 0.9805 points out the probability that system gives a negative result (not in the room) about the person’s location and it is true.
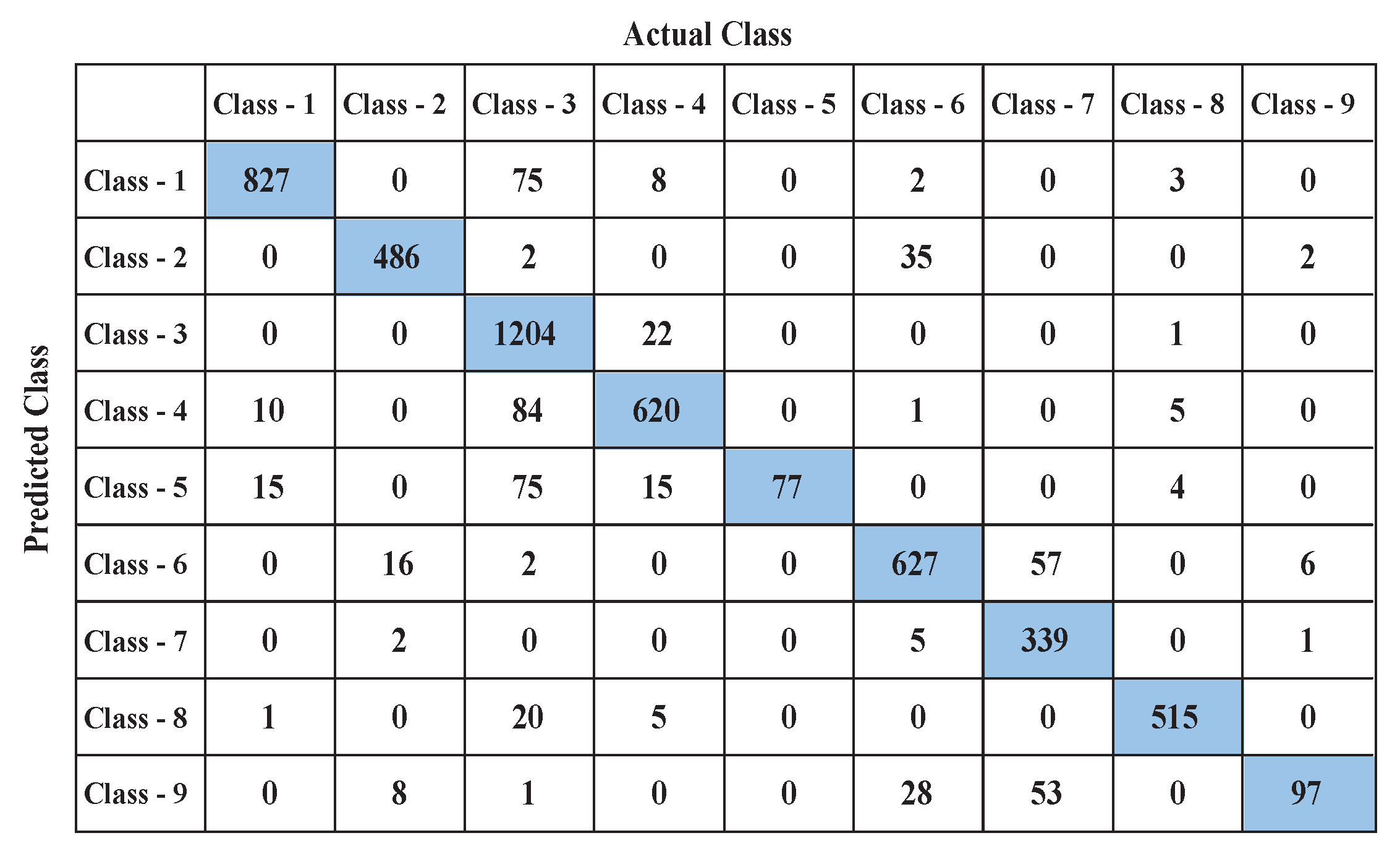
Confusion matrices are observed for further analysis.
Figure 15 shows the confusion matrix for learning outcomes when the highest accuracy is achieved (with 30% training and 70% testing data). The classifier has performed very well in case of Classes-1, 2, 3, 6, 7, and 8. These classes (defined previously) actually represent typical activities in a home environment. These data have been gathered from the places where signal attenuation was lower and well within the 8 m radius. Therefore, the locations have been successfully predicted by the MC-SVM for these cases. In addition, the number of false predictions is very low for these categories. The results reveal that most of the misclassification occurred in case of Classes 4, 5, and 9. Dining and kitchen area related signatures are considered as Classes 4 and 5. These two locations are furthest from the single device, beyond thick walls, and are physically contained within the one room space, where the radar suffers a low SNR for detection. This explains the (10 + 84 + 1 + 5) = 100 misidentifications that occurred here.
In the case of the kitchen (Class-5), the total number of misclassifications are (15 + 75 + 15 + 4) = 109, because of the lower SNR and potential multipath confusion that has occurred here. The classifier also became confused in case of Class-9, which considers the walking signature from the bathroom to the living room via the kitchen, dining, and hallway entrances, with (8 + 1 + 28 + 53) = 90 incorrect predictions in this case. In some cases, though the azimuths are different, the frequency content of an activity and distances from the radar are the same, which also leads to the incorrect placement prediction. This work is now considering directional antennas to improve the SNR and reach, and also the implementation of more than one radar device to improve signal levels and accuracy within the real home under investigation.
4.1. Comparison
The proposed model’s performance has been compared with recent, similarly aiming works in the field in
Table 4. Usually, performance analysis is done via accuracy, specificity or precision, and sensitivity or recall. Thus, these three metrics have been used to create informed comparisons. Yao et al. [
16], Diraco et al. [
26], and Fleury et al. [
28] have implemented either accuracy or sensitivity-specificity. Barsocchi et al. [
22] have chosen three best performing localization based AAL namely CPS [
23], n-Core [
24], and RealTrac [
25] from EvAAL to assess their performance. Thus, the performance of these three systems have been provided in
Table 4. The performance metrics of the proposed work have been marked in bold font. Barsocchi et al. (CPS) [
22,
23] has achieved best accuracy of 0.9120 (
), while Yao et al. [
16] achieved lowest accuracy of 0.7843 (
) among other methods listed here. Yao et al. [
16] have also performed the work for more than one subject at a time and achieved better accuracy, but the works compared here focused to help or provide assistance per person, thus the performance to assist a single person has been considered from the model of Yao et al. [
16]. Though accuracy, specificity, and sensitivity are popular and established metrics, accuracy cannot uniquely quantify a model’s performance because of its consideration of all predictions (including true positive and true negative). Thus, the high accuracy sometimes misleads the performance analysis which is reflected in case of Barsocchi et al. (CPS) [
22,
23]. The method has not achieved high precision and recall indicating the low positive predictions (true positives) and low positive predictions among each class. The proposed work has attained highest specificity of 0.9941 (
) and sensitivity of 0.9038 (
), signifying the preciseness and completeness of the proposed model. The models Barsocchi et al. (CPS) [
22,
23], Barsocchi et al. (n-Core) [
22,
24], and Barsocchi et al. (RealTrac) [
22,
25] have attained high accuracy but low specificity and sensitivity indicating an imbalance in performance for different scenarios. Chernbumroong et al. [
27] have reached to steady performance in terms of all three metrics. In other references, Lopez-de-Teruel et al. [
19], Diraco et al. [
26], and Fleury et al. [
28] have resulted either a high accuracy or low specificity-sensitivity or vice versa, whereas the proposed work has attained a stable performance in terms of all three metrics and can be therefore be considered as a trusted, well-performing, intelligent AAL model.
4.2. Discussion
The proposed ECS prototype intends to observe and track the daily living as well as the working environment to provide safe, active, and independent life for those involved. Usually, the context aware models are restricted for two reasons and require significant advancement; requirements of infrastructure and unwillingness to accept assistive systems. The proposed work has been built by considering these two reasons. The proposed model has used a single non-intrusive IR-UWB biosensor device for monitoring purpose, whereas the existing works need to employ wearable device for each person or time-of-flight cameras, which cannot work in non-line of sight condition, as well be seen to invade user privacy and security. The device has a resolution of 9.15 mm, thus two movements separated by 9.15 mm can be identified in the floor plane with the help of the range and derived azimuth measurement. Therefore, the identification of an exact location of movement is possible, whereas the existing works using RSSI, accelerometers, or wearable device to understand the location. This whole architecture is connected with a secure cloud server mechanism to understand home condition remotely, where the SVM algorithm has been trained to discover different type of movements for household activities. It has attained better performance (accuracy
, specificity
, and sensitivity
) than other state-of-art works to understand and notify in home conditions. Subsequently, no movement for a given time, twitching, jerking, body shaking unusually would provide new patterns to the system could generate notifications for the attention of caregivers. The IR-UWB device has PRI (lsited in
Table 1) of 100 ns which means each pulse will repeat after 100 ns, the scan interval (lsited in
Table 1) of 25,000
s, the range is being updated after every 132 ms (in the current settings, PII = 12), and the system takes 3.2 ms to process each scan. Therefore, it takes 160.20 ms to reflect some movement or no-movement in the model. Thus, any decision regarding abnormal occurrences can be taken within this interval. The radar has been fixed to position therefore, it does not need to be carried or considered after deployment which would be easy to accept the system and obtain true behaviour marking for the user since they can effectively forget they are being monitored. Therefore, the ECS model would be a trusted, well performing, and intelligent solution for home monitoring.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}