1. Introduction
Rotating machinery covers extensive mechanical equipment and plays an important role in industrial production. It generally serves in a complicated and harsh environment, and may experience faults caused by the environment [
1]. It is of important significance to guarantee safe and reliable running of large rotating machinery.
Structural faults are the most common fault in rotating machinery. It not only causes direct baneful influences on performance of equipment and quality of products, but also it causes excessive stress on surrounding components (such as bearings and gears) and causes secondary failure [
2]. Therefore, early diagnosis of structural faults and diagnosis of fault types are extremely important subjects [
3,
4]. Structural faults of rotating machinery often include unbalance, misalignment, and looseness of fasteners, which are caused by machinery structural defects. These structural faults lead to a relatively low-frequency fault vibration. Compared with other types of faults, the faults caused by structural faults have two prominent common features, namely, component changes in the spectrum of the vibration signal at the rotating frequency and its harmonic frequency. In particular, vibration signals of different structural faults under low-rotating speed present extremely similar characteristics on the frequency spectra, which bring a great difficulty for extraction of fault characteristics and diagnosis of fault types. Although some studies have revealed part of spectral characteristics of a series anomalous state, it is still insufficient to accurately draw a distinguishing line between different structural faults [
5].
It is a common method in rotating machinery fault diagnosis to analyze fault vibration signals and disclose fault characteristics by effective signal processing technology [
6,
7]. Whether key fault information can be extracted from vibration signals for diagnosis is an important challenge of signal processing technology. Traditional signal processing technologies covers analysis of time-domain signals and frequency-domain signals [
8,
9]. They perform well in the analysis of fault characteristics.
In frequency-domain analysis, characteristics of vibration signals in the frequency domain can be observed more easily by Fourier transform. In addition, explicit fault characteristics and diagnosis information can be acquired through frequency spectra of vibration signals [
10]. However, signals of different types of fault caused by structural faults present extremely similar features on frequency spectra, especially under a low rotating speed [
11]. This increases the difficulty to extract fault characteristics and diagnosis of fault types significantly. The traditional frequency-domain analysis methods are unable to realize precise diagnosis of structural faults of such rotating machinery.
Compared with other machine faults, structural faults are prominent for changes of rotating frequency and changes of harmonic component. Moreover, vibration signals of structural faults are dynamic nonlinear system signals. Traditional time-domain analyses are mainly based on the hypothesis that the process of signal production is static and linear. Hence, they may make the wrong judgment if fault signals are dynamic nonlinear systematic signals caused by structural faults [
12,
13]. Some studies introduced empirical mode decomposition (EMD) in order to process these dynamic nonlinear systematic signals in the rotating machinery fault. As a strong time-frequency analysis technology, EMD is an adaptive signal processing technology applicable to a nonlinear and non-static process [
14]. It has been widely used in many fields, including injection control, modeling, speech recognition, and system control. In many studies on EMD, EMD has been applied in fault diagnosis of rolling bearing, gears, and rotors [
15]. Nevertheless, these studies basically focus on one component of machineries rather than the type of fault [
16]. It is necessary to emphasize on integrity of the equipment, but few have discussed the precise diagnosis method of rotating machinery structural faults. In addition, the original EMD method involves many problems, such as mode mixing, end effect, interpolation problem, end standards, and optimal intrinsic mode function (IMF) selection [
17]. These may make EMD produce meaningless or unnecessary intrinsic mode functions (IMFs), which may decrease the fault diagnosis accuracy and even misguide the diagnosis decision. It is necessary to further improve EMD or combine it with other processing techniques.
With the popularization of the artificial neural network, the fault diagnosis becomes more and more intelligent and accurate under the assistance of neural networks by its strong pattern recognition capability. Even though some studies have implemented a neural network-based fault diagnosis, the types of faults they can diagnose are specific fault states and are very limited [
18]. We have not found a study that uses the neural network to precisely diagnose structural faults, especially at low rotating speeds. Moreover, some studies focus on fault diagnosis of single part, instead of the global precise diagnosis of multiple fault types of multiple parts [
19]. Other conventional discriminant methods like support vector machine (SVM) have evident advantages in binary classification problems. However, SVM still fails to achieve precise diagnosis of structural faults, which is related with the difficult extraction of fault characteristics.
Deep learning possesses considerable advantages in pattern recognition and it has been highly used in many fields [
20,
21,
22,
23]. It makes the precise fault diagnosis based on deep learning, especially precise diagnosis of structural faults, possible. Appropriate processing of diagnosis signals before deep learning can further increase the diagnosis accuracy of machine faults [
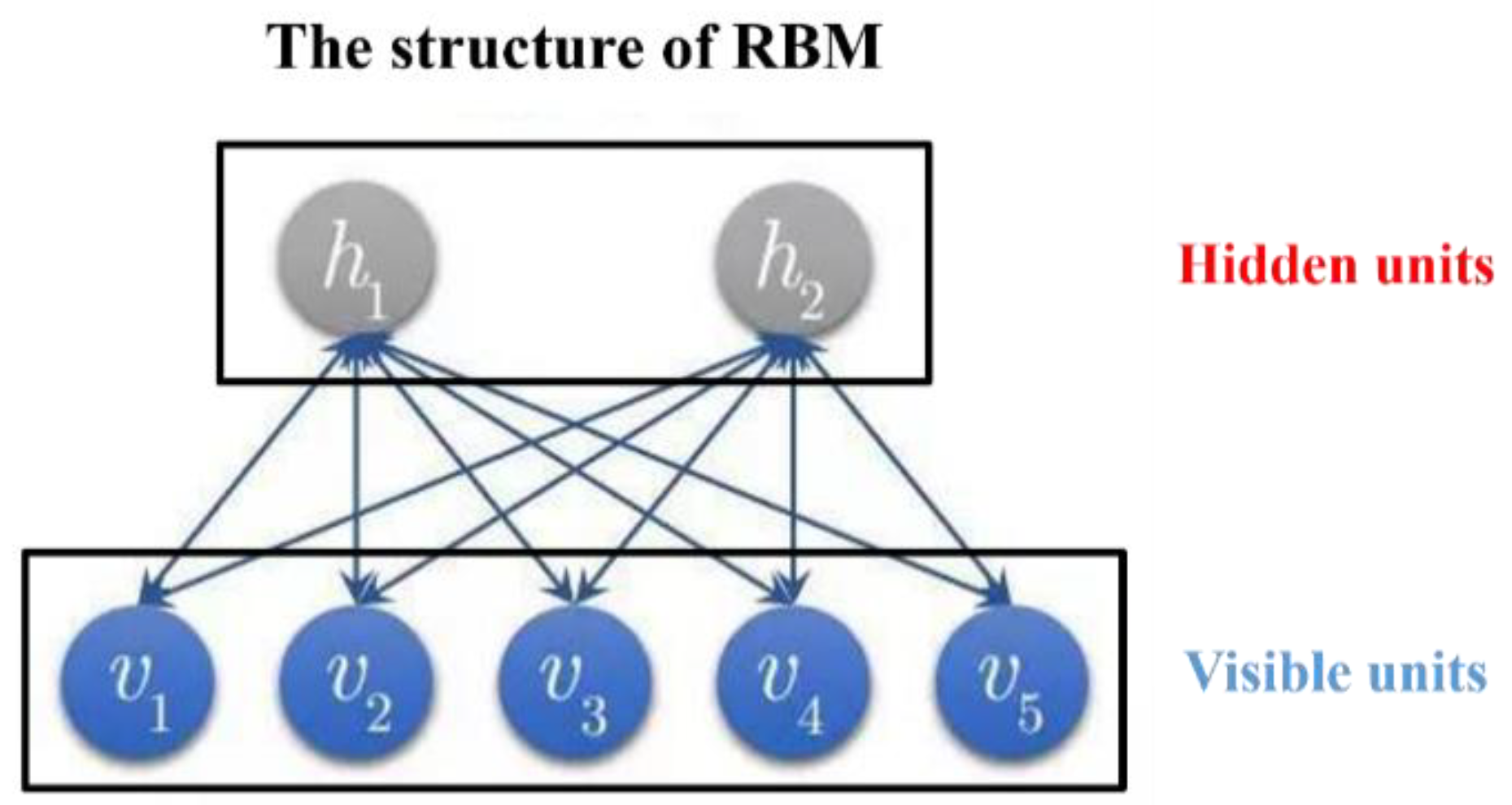
24]. In this study, diagnosis accuracy is too far from precise diagnosis when the original time-domain signals are input into the deep belief neural network (DBN). Although the diagnosis accuracy is increased significantly by inputting the frequency-domain signals, the diagnosis accuracy under low rotating speed is still insufficient to meet the requirements of a precise diagnosis. In order to increase the accuracy of a precise diagnosis, the fault information extraction method that combines EMD and sample entropy was proposed. The original signal is decomposed into many intrinsic mode functions with different frequency domains, and the sample entropy is calculated for extracting the signals that carry fault information with high signal-to-noise ratio (SNR). The extracted fault signal is reconstructed into a new vibration signal that will carry abundant fault information. The reconstructed signal treated the input and brought satisfying diagnosis accuracy under different rotating speeds, which meets the requirements of precise diagnosis. Structural faults of rotating machinery could be recognized by this method. On this basis, an intelligent diagnosis system for structural faults could be constructed.
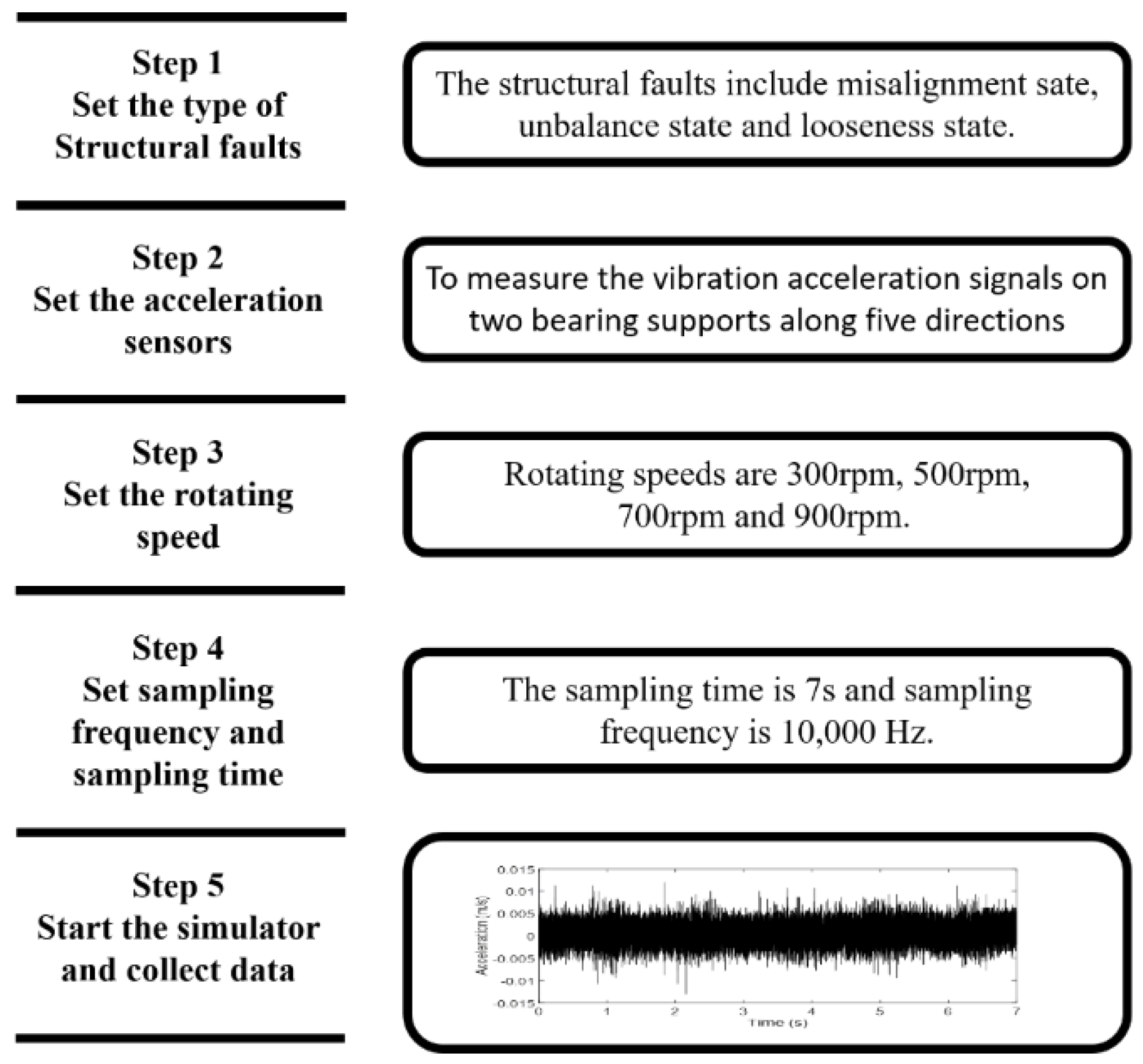
Procedure of the proposed method is shown in
Figure 1 and includes the following steps:
measuring vibration signals of the targeted rotating machinery (hereinafter referred to as the diagnosed signals);
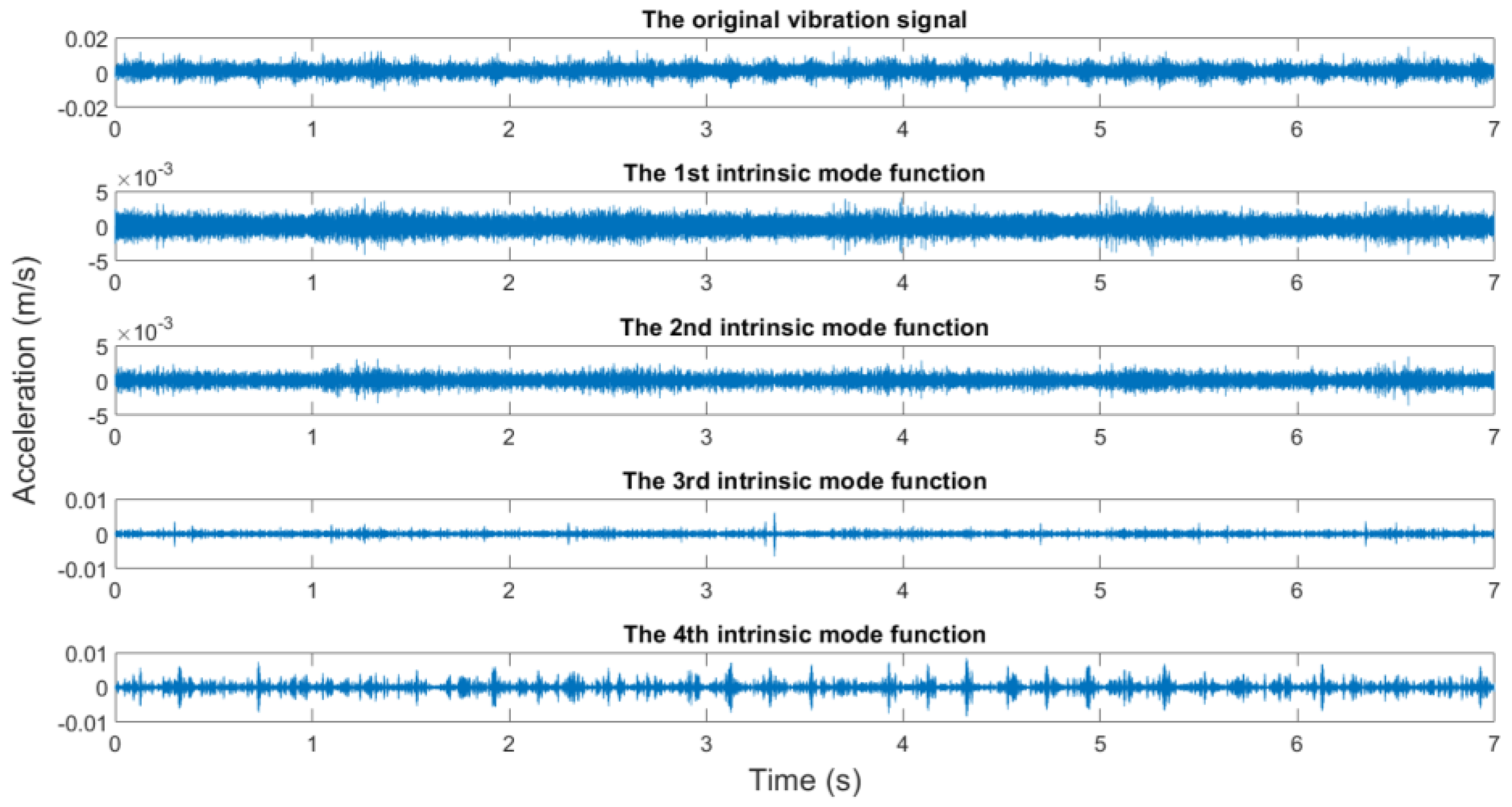
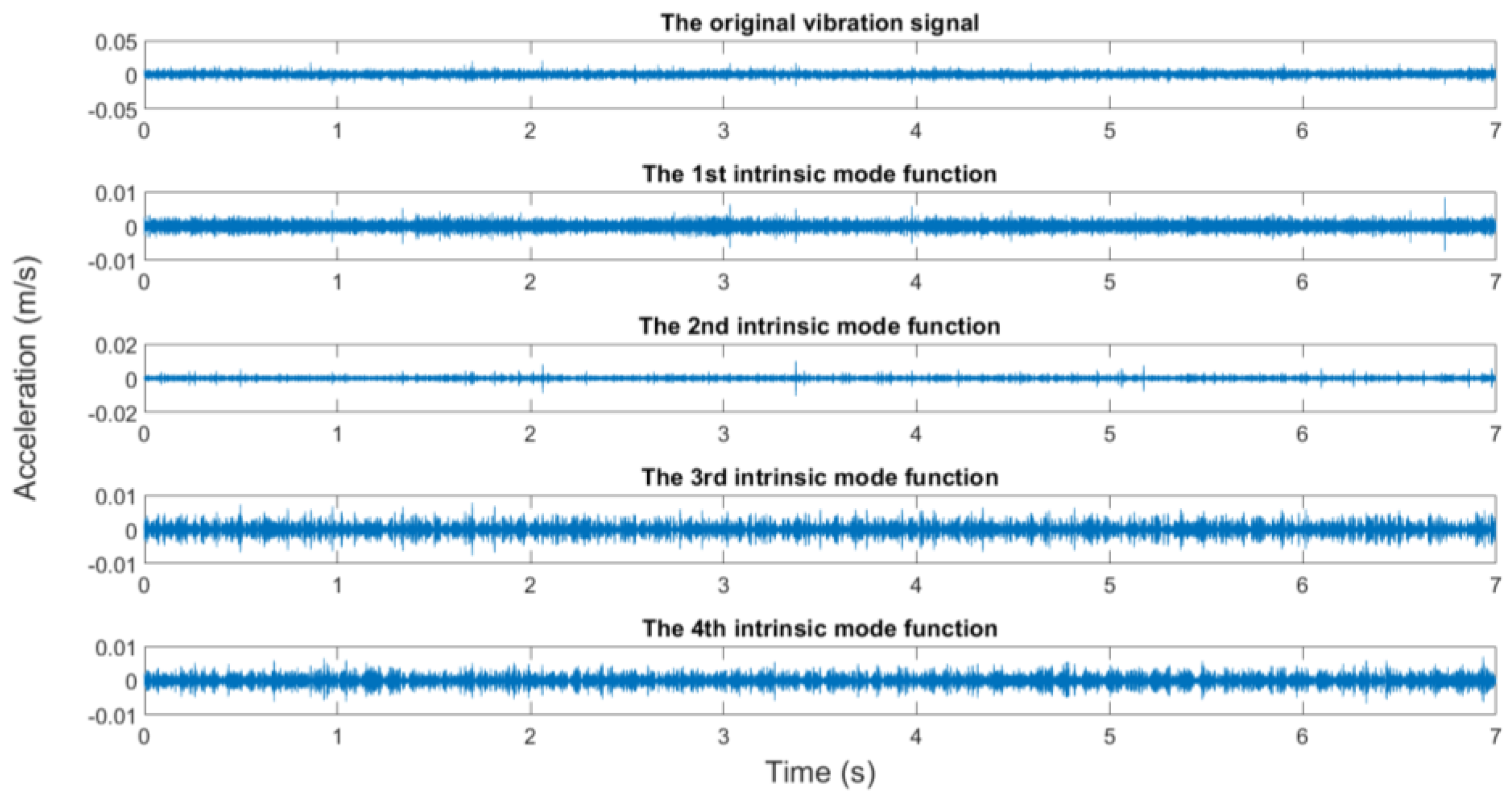
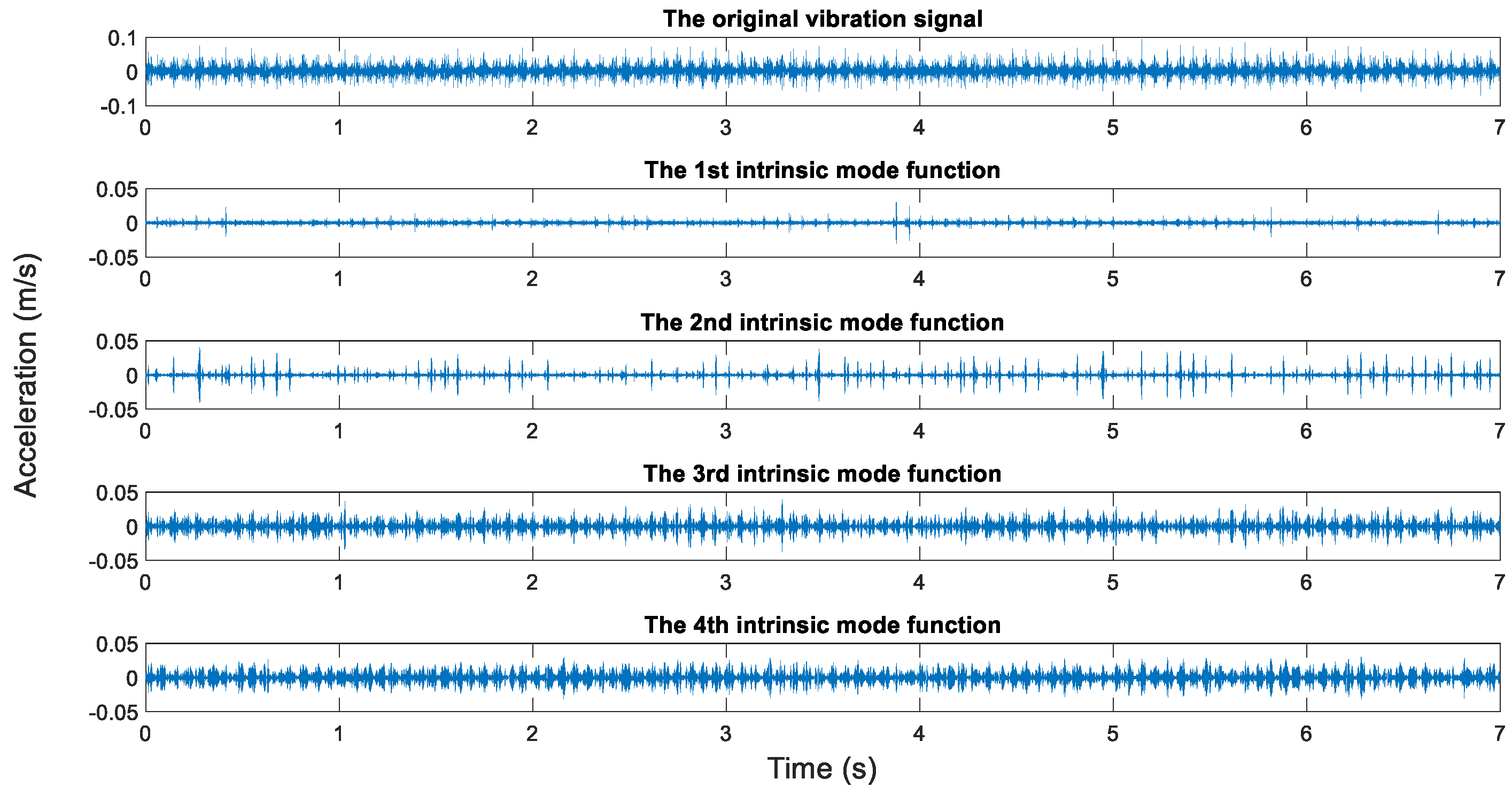
decomposing the original vibration signal into several IMFs by EMD;
calculating sample entropy of IMFs and screen the signals that contain many fault information;
reconstructing the screened signals into new characteristic signals;
implementing FFT to new characteristic signals, and then gain their frequency-domain characteristic signals;
inputting the frequency-domain characteristic signals into the trained DBN and get the final diagnosis results.
The rest part of this paper is organized as follows.
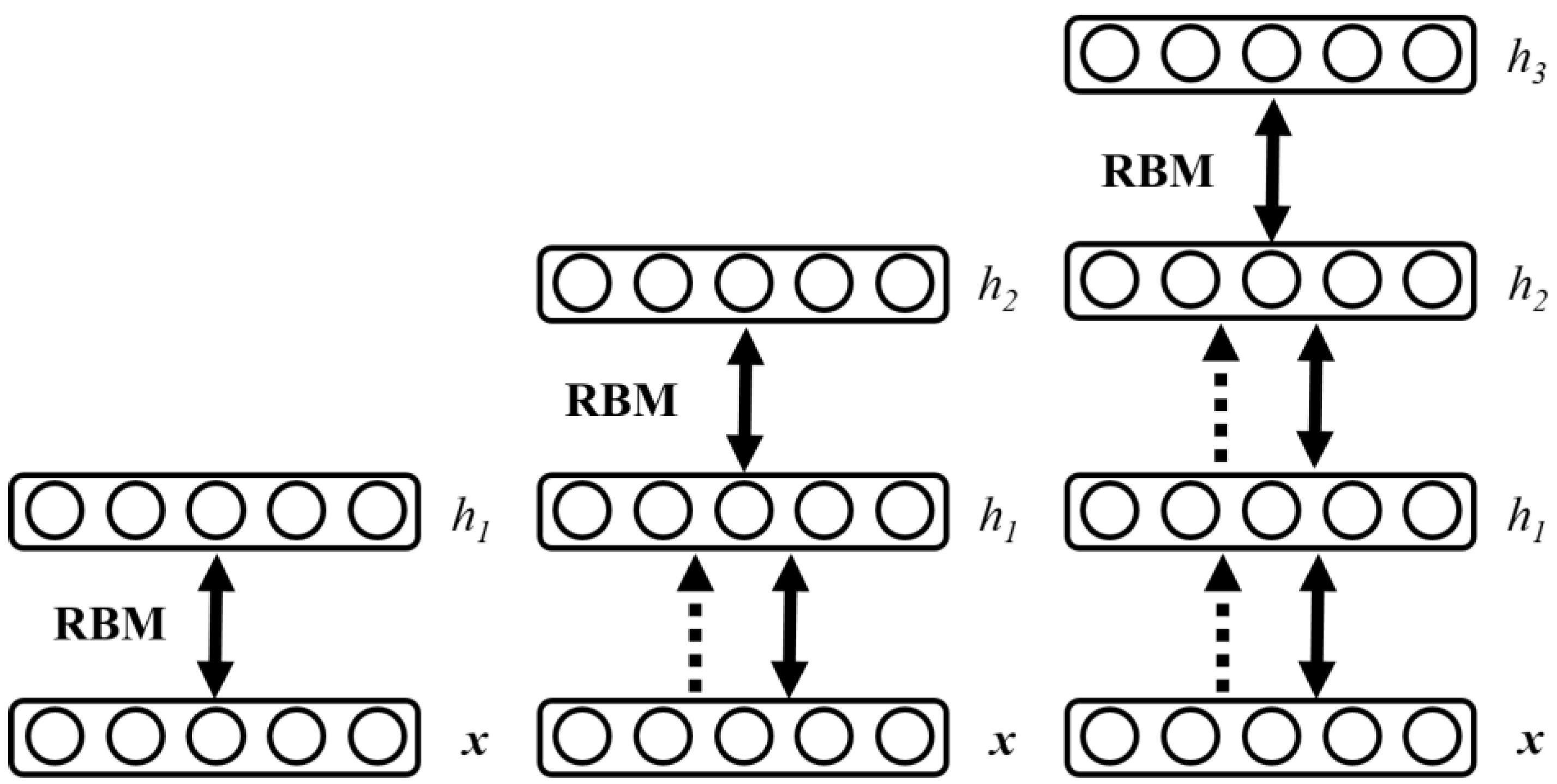
Section 2 introduces the theory of the proposed method including EMD, sample entropy, extracted fault signal reconstruction, and the DBN diagnosis model. In
Section 3, the effectiveness of the proposed method is validated by structural faults signal under different rotating speeds.
Section 4 presents a comparison with the BPNN model, the CNN model, the time domain signal only, and the frequency domain signal only. Lastly,
Section 5 summarizes the conclusions.
5. Conclusions
In this study, to realize accurate detection and recognition of structural faults of rotating machinery, a precise diagnosis method based on fault information extraction that combines EMD and sample entropy as well as DBN was proposed. Diagnosis results based on time-domain signals, diagnosis results based on frequency-domain signals, and diagnosis results based on the combination of frequency-domain signals and fault information were compared. It finds that diagnosis accuracy based on time-domain signals was unsatisfying because time-domain signals are difficult to express all features of signals. Therefore, the time-domain signals fail to detect and recognize structural faults. The most prominent common features of structural faults are changes of rotating frequency and its harmonic components. Therefore, diagnosis accuracy based on frequency-domain signals was increased significantly compared with that based on time-domain signals. Since different types of structural faults have similar features in the frequency domain, the diagnosis accuracy based on frequency-domain signals under low rotating speed is unsatisfying and has to be improved. When fault information was extracted by combining EMD and sample entropy, the original vibration signals were decomposed and signals with high SNR that contain abundant fault characteristics were selected and reconstructed into new vibration signals. Frequency-domain signals of these new vibration signals were used in diagnosis, which achieves high accuracy under both high and low rotating speeds. In other words, the proposed method can detect and recognize structural faults under different rotating speeds. It realizes precise diagnosis of structural faults. Moreover, an intelligent precise diagnosis system can be constructed based on the proposed method. This is conducive to realize the goal of early diagnosis of structural faults in practical production. Compared with BPNN and CNN, the method proposed in this study was superior to other methods in the precision diagnosis of structural faults in rotating machinery, and has the highest diagnostic accuracy.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}