Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China


 , ,
, ,
Abstract
:1. Introduction
2. Problems
2.1. Complex Spraying Environment
2.2. Multifarious Farmland Obstacles
2.2.1. Size-Based Classification
- Micro obstacles: wire, inclined cable, branch, protruding plant, power grid or communication line, wooden pole or pergola placed in the field, test pole, nylon net, metal net, etc.
- Small and medium obstacles: scattered tree, telegraph pole, hayrick, wind turbine, etc.
- Large obstacles: shelter forest, high-pressure tower, house, meteorological tower, etc.
- Non-fixed or visually-distorting obstacles: bird and beast, human being, high-speed moving non-living objects, blurring-texture or specular- reflecting objects, for instance, pond, plastic film in greenhouse, PC sun sheet, etc.
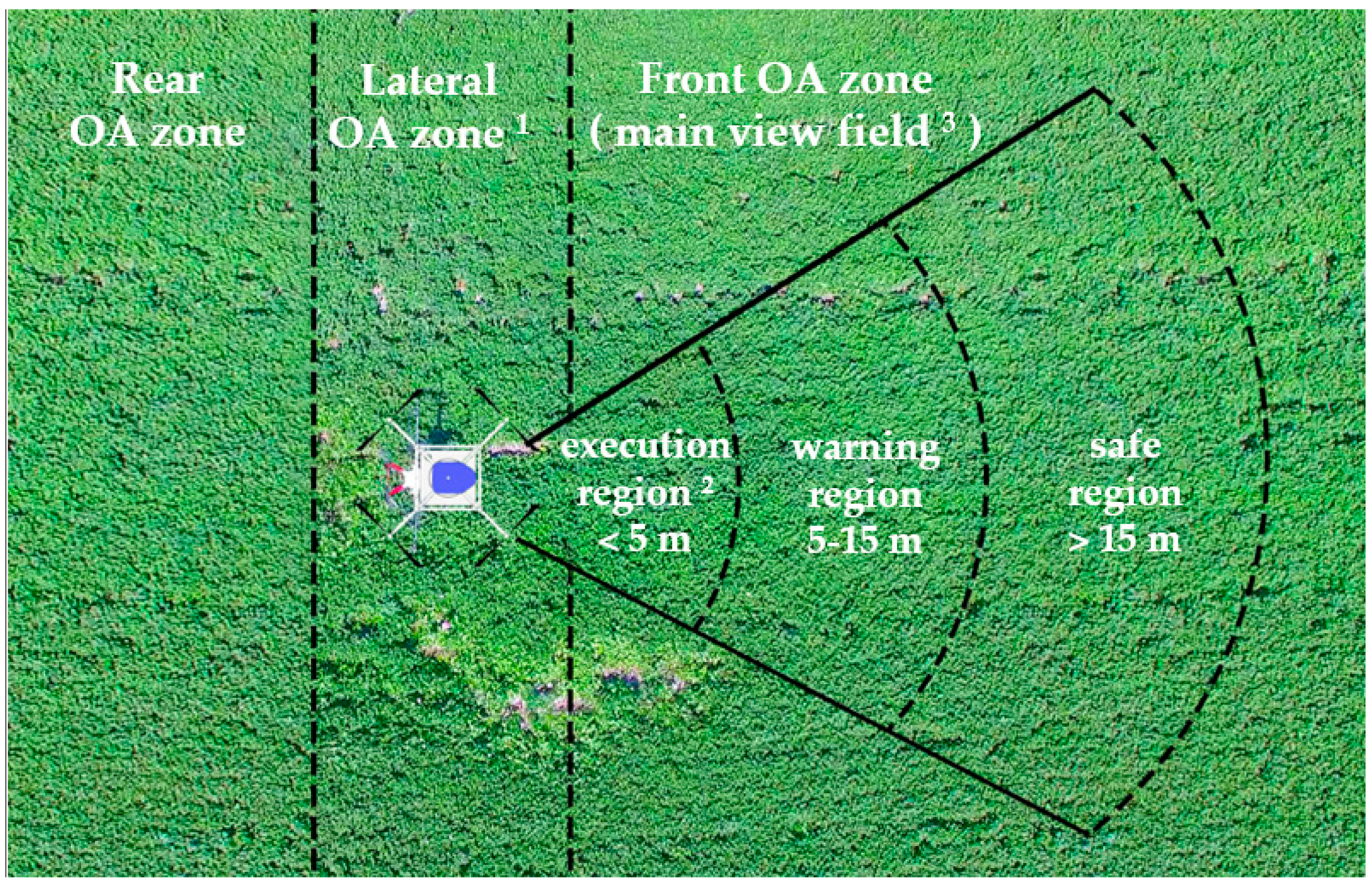
2.2.2. Distance-Based Classification
- Short-range obstacles: within 5 m from the agricultural UAV.
- Middle and long-range obstacles: 5 to 15 m from the agricultural UAV.
- Long-range obstacles:15 m away from the agricultural UAV.
2.3. Obstacle Avoidance Zone
3. Application of Agricultural UAV Obstacle Avoidance Technology in China
3.1. Chinese Manufacturers of Plant-Protection Drones
3.2. Application of Agricultural UAV OA Technology in China
4. Analysis and Prospects
4.1. Multi-Sensor Obstacle Avoidance Forms
4.2. Real-Time Active Obstacle Avoidance Technology
4.3. Development of OA Auxiliary System & Standardization of OA Process
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Center for International Collaboration Research on Precision Agricultural Aviation Pesticides Spraying Technology. Development Situation Analysis and Policy Recommendations on China’s Agricultural Plant Protection Unmanned Aircraft 2016; Internal Report; South China Agricultural University: Guangzhou, China, 2017; p. 5. [Google Scholar]
- Zhang, D.Y.; Lan, Y.B.; Chen, L.P.; Wang, X.; Liang, D. China Current Status and Future Trends of Agricultural Aerial Spraying Technology in China. Trans. Chin. Soc. Agric. Mach. 2014, 10, 53–59, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- The State Council of the People’s Republic of China. Available online: http://www.gov.cn/zhuanti/2017-10/27/content_5234876.htm (accessed on 27 October 2017).
- Lou, S.; Xue, X.; Gu, W.; Cui, L.; Zhou, Q.; Wang, X. Current Status and Trends of Agricultural Plant Protection Unmanned Aerial Vehicle. J. Agric. Mech. Res. 2017, 12. (In Chinese) [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Jin, J.; Liu, A. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2016, 17, 40–46, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Lan, Y.; Wang, G. Development Situation and Prospect of Plant Protection UAV Industry in China. Agric. Eng. Technol. 2018, 38, 17–27. [Google Scholar] [CrossRef]
- He, X.K.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- The Joint Circular of the General Offices of MOA, MOF and the Civil Aviation Administration of China on Launching Pilot Programs of Farm Machinery Purchase Subsidy for Standard Operation of Plant Protection Drone. Available online: http://www.moa.gov.cn/govpublic/NYJXHGLS/201709/t20170925_5823523.htm (accessed on 18 September 2017). (In Chineses)
- The General Offices of MOA and MOF on Launching Guidance for the Implementation of Agricultural Machinery Purchase Subsidies (2018-2020). Available online: http://www.moa.gov.cn/govpublic/CWS/201803/t20180301_6137657.htm (accessed on 15 March 2018). (In Chineses)
- Three-Year Action Plan of MIIT to Promote the Development of a New Generation of Artificial Intelligence Industry (2018-2020). Ministry of Industry and Information Technology of the People’s Republic of China. Available online: http://www.miit.gov.cn/n1146285/n1146352/n3054355/n3057497/n3057498/c5960779/content.html (accessed on 14 December 2017).
- Guangdong Province’s New Generation of Artificial Intelligence Development Plan. Available online: http://www.gd.gov.cn/gzhd/zcjd/201808/t20180814_274320.htm (accessed on 14 August 2018).
- Stereo Vision: Algorithms and Applications. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.368.1660 (accessed on 22 May 2012).
- Chen, S.; Lan, Y.; Li, J.; Xu, X.; Wang, Z.; Peng, B. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV. Trans. Chin. Soc. Agric. Eng. 2017, 7, 82–90, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Pan, H.; He, Z. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial1 vehicle. Trans. Chin. Soc. Agric. Eng. 2016, 11, 54–61, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, D.; Zhang, J.; Li, W.; Xiong, B.; Zhang, S.; Zhang, W. Design and Test of Dynamic Variable Spraying System of Plant Protection UAV. Trans. Chin. Soc. Agric. Mach. 2017, 5, 86–93, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Lan, Y.B.; Chen, S.D.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Wang, Z.; Lan, Y.; Clint, H.W.; Wang, Y.; Zheng, Y. Low Altitude and Multiple Helicopter Formation in Precision Aerial Agriculture. In Proceedings of the 2013 ASABE Annual International Meeting, Kansas, MO, USA, 21–24 July 2013. [Google Scholar]
- Lu, L.; Geng, Z.; Bian, Y.; Gao, B.; Song, X. Application of Agricultural plant protection UAV based on BDS-RTK. In Proceedings of the 8th China Satellite Navigation Conference, Shanghai, China, 23–25 May 2017; pp. 1–4, (In Chinese with English abstract). [Google Scholar]
- Wang, M. Localization and Obstacle Avoidance Control of Agricultural Robot Based on DSP and Ultrasonic Distance Measurement. J. Agric. Mech. Res. 2017, 8, 207–211, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Cheng, H.; Li, J.; Jin, B. Research of Small Blind Zone Ultrasonic Ranging Method Based on Natural Vibration Restraining. J. Vib. Meas. Diagn. 2015, 2, 369–374, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Ma, D.; Shen, H. Handbook of Acoustic, Revised ed.; Science Press: Beijing, China, 2004; p. 141. ISBN 7030125452. [Google Scholar]
- Wen, T.; Gao, S.; Zou, H. Based on Laser Ranging Method Research of UAV Terrain Matching Flight. Comput. Meas. Control 2015, 9, 3209–3212, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Zhao, H.; Liu, Y.; Zhu, X.; Zhao, Y.; Zha, H. Scene understanding in a large dynamic environment through a laser-based sensing. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; Volume 58, pp. 127–133. [Google Scholar]
- Kobayashi, Y. Laser Range Finder. Available online: https://patentimages.storage.googleapis.com/f9/29/e6/2989793b56f09f/USD723080.pdf (accessed on 3 February 2019).
- Houshiar, H.; Elseberg, J.; Borrmann, D.; Nüchter, A. A study of projections for key point based registration of panoramic terrestrial 3D laser scan. Geo-Spatial Inf. Sci. 2015, 18, 11–31. [Google Scholar] [CrossRef]
- Zhou, L. Scene Measurement in UAV Navigation Based on Stereo Vision and Laser Scanning. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 1 February 2012. (In Chinese with English abstract). [Google Scholar]
- Huang, S.; Xia, T.; Zhang, T. Passive ranging method based on infrared images. Infrared Laser Eng. 2007, 1, 109–112, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Lu, Y.; Feng, Y.S.; Ling, Y.S.; Qiao, Y. Infrared three-color passive ranging by colorimetric method. Opt. Precis. Eng. 2012, 12, 2680–2685, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Shen, Z. Helicopter Pods-based Obstacle Avoidance Technology Using Infrared Imaging and Radar. Sci. Technol. Innov. Her. 2014, 29, 56–59, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Uzkent, B.; Hoffman, M.J.; Vodacek, A.; Chen, B. Feature Matching with an Adaptive Optical Sensor in a Ground Target Tracking System. IEEE Sens. J. 2015, 15, 510–519. [Google Scholar] [CrossRef]
- Zhu, L. Sense and Avoid Technology for Unmanned Aircraft Vehicles. Ph.D. Thesis, Southeast University, Nanjing, China, 12 May 2016. (In Chinese with English abstract). [Google Scholar]
- Wang, Y.; Liu, J.; Zeng, Q. 3D environment restructure method with structured light for indoor vision/inertial navigation. J. Chin. Inert. Technol. 2016, 1, 51–58, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Liu, Y. Research on Robotic Structured Light Vision System Calibration. PhD’s Thesis, Beijing Institute of Technology, Beijing, China, 1 June 2015. [Google Scholar]
- Thorbjornsen, B.; White, N.M.; Brown, A.D.; Reeve, J.S. Radio frequency (RF) time-of-flight ranging for wireless sensor networks. Meas. Sci. Technol. 2010, 21, 035202. [Google Scholar] [CrossRef]
- Steven, L.; David, T.L.; Kristofer, S.J.P. RF Time of Flight Ranging for Wireless Sensor Network Localization. In Proceedings of the International Workshop on Intelligent Solutions in Embedded Systems, Vienna, Austria, 30 June 2006; Volume 53, pp. 1–12. [Google Scholar] [CrossRef]
- Small Civil Millimeter-Wave Radar and Its Application. Available online: https://www.leiphone.com/news/201612/owHDk93xVS9g1gUC.html (accessed on 12 December 2016).
- Ding, L.; Geng, F.; Chen, J. Radar Principles, 5th ed.; Publishing House of Electronics Industry: Beijing, China, 2014; pp. 222–226. ISBN 9787121226236. [Google Scholar]
- Rankin, G.; Tirkel, A.; Leukhin, A. Millimeter wave array for UAV imaging MIMO radar. In Proceedings of the IEEE 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015; pp. 499–504. [Google Scholar]
- Wan, Y.; Liu, J. A UAV Obstacle Avoidance System Based on Millimeter Wave Radar. China Patent CN107,678,030A, 9 February 2018. [Google Scholar]
- Chu, H. Analysis and Research of 24 GHz Automotive Radar System and the Key Techniques of the Frequency Source. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 1 June 2015. (In Chinese with English abstract). [Google Scholar]
- Xiang, J.; Zhang, M. Millimeter-Wave Radar and Its Applications; National Defense Industry Press: Beijing, China, 2005. [Google Scholar]
- Han, X. Research on Autonomous Obstacle Avoidance Algorithm for UAV Based on Monocular Vision. Master’s Thesis, Harbin Engineering University, Harbin, China, 1 June 2016. (In Chinese with English abstract). [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intel. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, Z.; Dai, M. Monocular vision system for distance measurement based on feature points. Opt. Precis. Eng. 2011, 5, 1110–1117, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Liu, X.; Xing, Z. Obstacle detection for unmanned aerial vehicle based in monocular vision. Laser Infrared 2009, 6, 673–676. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, X.; Wang, J.; Zeng, R. Obstacle avoidance algorithm based on monocular vision for quad-rotor helicopter. Opt. Precis. Eng. 2014, 8, 2232–2241. [Google Scholar] [CrossRef]
- Su, D. Navigation and Obstacle Avoidance for Miniature UAV Based on Binocular Stereo Vision. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 1 Mar 2014. (In Chinese with English abstract). [Google Scholar]
- Zhang, L.; Xu, J.; Xia, Q. Pose Estimation Algorithm and Verification Based On Binocular Stereo Vision for Unmanned Aerial Vehicle. J. Harbin Inst. Technol. 2014, 5, 66–72, (In Chinese with English abstract). [Google Scholar]
- Johnson, E.N.; Calise, A.J.; Watanabe, Y.; Ha, J.; Neidhoefer, J.C. Real-Time Vision-Based Relative Aircraft Navigation. J. Aerosp. Comput. Inf. Commun. 2007, 4, 707–738. [Google Scholar] [CrossRef]
- De Wagter, C.; Bijnens, B.; Mulder, J.A. Vision-Only Control of a Flapping MAV on Mars. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit (AIAA 2007-6853), Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar] [CrossRef]
- Zhu, P.; Zhen, Z.; Qin, H.; Jiang, J. Stereo vision and optical flow based obstacle avoidance algorithm for UAVs. Electron. Opt. Control 2017, 24, 31–35. [Google Scholar]
- Zhang, T.; Yang, Z.; Hu, G.; Han, J.; Zhang, X.; Shen, Y. UAV Obstacle Avoidance Method and System Based on Binocular Vision and Optical Flow Fusion. China Patent CN106,681,353A, 17 May 2017. [Google Scholar]
- Li, G.; Li, W.; Zhang, J. Research on the patent situation of the key technology of UAV system. Telecommun. Netw. Technol. 2017, 3, 30–36. [Google Scholar]
- Xu, X.; Wang, Z.; Li, J.; Yang, Z.; Cai, K.; Lu, M.; Zhong, Z.; Liu, W. Orchard Plant Protection Drone Obstacle Avoidance Device and Method Based on Three-Level Obstacle Avoidance Mechanism. China Patent CN201611251528.1, 30 December 2016. [Google Scholar]
- Giles, D.K.; Billing, R.; Singh, W. Performance results, economic viability and outlook for remotely piloted aircraft for agricultural spraying. In Proceedings of the International Advances in Pesticide Application, Barcelona, Spain, 13–15 January 2015; Association of Applied Biologists: Wellesbourne, UK, 2016. Record Number: 20163064113. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Max Range/m | Advantages | Disadvantages | Whether Suitable for Obstacle Avoidance of Agricultural UAV | Applied Agricultural UAVs/Manufacturers |
|---|---|---|---|---|---|
| RTK | ---- | accurate | no shelter | on-site calibration, suitable for creating obstacle maps, not for real-time OA | XAG: P20/30 2018 P series 2019 GKXN: M23-E, S40-E Hanhe: Venus-1 AYQF: 3WQFTX-10 DJI: T16 |
| Ultrasonic sensor | <10 | cheap | near detection distance, a blind spot for detection, vulnerable to environment | low resolution, more suitable for short-range OA safety auxiliary device | XAG: P20 2017 |
| Laser/initiative infrared sensor | <50 | high resolution, reliability | required mechanical, scanning, single point measurement is unreliable, multi-wire solid state sensor is expensive and immature | High requirements on environment, only acquire discrete information, suitable for short-distance obstacle avoidance | DJI (consumer UAVs): Inspire 2, Mavic 2, Phantom 4 Pro Hanhe: CD-15 |
| Structured light sensor | <10 | high resolution, more reliable than binocular | adjacent structure light sensors interfere with each other, vulnerable to outdoor natural light | only suitable for indoor OA | ---- |
| TOF | <10 | high reliability | low resolution, susceptible to environmental interference | small sensing range, suitable for OA auxiliary device | ---- |
| Millimeter-wave radar | <250 | high reliability, can be tested in heavy rain, dense fog and others | low resolution, high cost | More applied to agricultural UAV terrain-imitation flight, the OA/anti- collision system with middle and long distance is cost-ineffective | XAG: P series 2018/2019 DJI: MG-1S GKXN: S40-E TXA: R-16 |
| Monocular vision | <10 | low cost, less demand of computing resources, relatively simple system architecture | continually update to maintain a large sample database | Low reliability, more suitable for static or 1D moving objects. | DJI (consumer UAVs): Mavic 2 |
| Binocular vision | <100 | high resolution | needing adequate lighting | change the baseline to detect obstacles at different distances, suitable for farmland OA problem | XAG: P20 2017, P20/30 2018 P series 2019 Hanhe: CD-15, Mercury-1 DJI: consumer UAVs |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors 2019, 19, 642. https://doi.org/10.3390/s19030642
Wang L, Lan Y, Zhang Y, Zhang H, Tahir MN, Ou S, Liu X, Chen P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors. 2019; 19(3):642. https://doi.org/10.3390/s19030642
Chicago/Turabian StyleWang, Linlin, Yubin Lan, Yali Zhang, Huihui Zhang, Muhammad Naveed Tahir, Shichao Ou, Xiaotao Liu, and Pengchao Chen. 2019. "Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China" Sensors 19, no. 3: 642. https://doi.org/10.3390/s19030642