In this part, a series of simulations are carried out to compare GBD with the JMBP GLRT, and then an experiment based on measured data is carried out to evaluate the performance of GBD in a real wideband monopulse radar.
4.1. Simulation 1: Performance of GBD and JMBP GLRT on Echoes of Different SNR
In this simulation, the echoes are Rayleigh-distributed. For comparison, the definition of scattering center parameters is the same as those for JMBP GLRT [
12], that is, the total SNR of the
th scattering center of the
th target is defined as
, with
being the number of pulses used in a radar processing period,
being the variance of
and
, and
being the variance of the sum channel noise samples. The range
is normalized to the range resolution, and the angles
are normalized to the 3 dB beam width. The sub-bin location is defined as
, where
is the first range sample with the energy of the
th scattering center of the
th target, and
, where
. The target parameters for the fourth bin are
,
,
, and the sub-bin position and DOA parameter of target 2 is
,
. The target parameters for each of the other bins are
,
, and
, where
. For GBD, to simplify the simulation, the echoes in a bin are only sampled by the leading sample point, which means the echo in the fourth bin is sampled by the fourth sampling point, and the fifth sampling point samples the echo in the fifth bin. As the echoes in a certain bin are actually sampled by the leading and end sampling points, the assumption above is equivalent to the method that declares the presence of a u-target in the bin when at least one of the two sampling points is detected as a u-target sample. The echoes of each bin are independent of each other. Aside from the test echoes, another 1000 echoes generated under the same parameter set is used to train the GMM, and the number of GMM components is
. We set the system noise variance
, and the measurement noise variance
.
, which is equivalent to
for JMBP GLRT, is set. The total scattering center SNR of target 2
sweeps from 12 dB to 30 dB, for each
, 1000 Monte Carlo simulations are performed, and the percentage of correct detection
of the two algorithms under the same false alarm rate
is shown in
Figure 3a. As is shown, both of the
s of the two algorithms rise as
increases, and GBD performs better. For example, when
, the
of JMBP GLRT is 0.62, and the
of GMD is 0.88. This is because GBD uses the samples of echoes as well as tracking information while JMBP GLRT uses the samples only. Aided by the tracking information, GBD lowers the threshold for detecting unresolved targets at the sample that is expected to be a u-target sample and raises the threshold at other samples. Thus, more u-target echoes as well as resolved target echoes are correctly detected.
In
Figure 3b, the computation time of GBD is between
s and
s, while the computation time of JMBP GLRT is between 7.6 s and 9.6 s under different
. This is because the computation for calculating GMM and Kalman filtering is much lower than solving the ML in JMBP GLRT. If the initial search point for JMBP GLRT is not set to the true value of the target parameters, which is more reasonable in real scenarios as there is no knowledge of the true value of target parameters, the computation time of JMBP GLRT would be even longer.
4.2. Simulation 2: Performance of GBD and JMBP GLRT on Echoes of Bimodal Distribution
The amplitude of echoes may not remain Rayleigh-distributed in different resolutions, so detection algorithms should be adaptive to echoes of different distributions while keeping low computational load. In this simulation, the performance of GBD and JMBP GLRT on echoes of different distributions are compared.
In this simulation, the resolution of the radar is high, and the echoes of them are bimodally distributed. We model the echoes by a mixture of two Gaussians according to the results in [
14]. In the fourth bin, the parameter set for Gaussian component 1 of the fourth scattering center of target 1 is
, and the parameter set for component 2 of the fourth scattering center of target 1 is
. The range and angle parameters are
,
. The parameter set for Gaussian components of target 2 is the same as target 1, and
,
sweeps from 0.1 to 0.9 to test the performance of the two algorithms in different angular separations between unresolved targets. In other bins, the parameter set for echo generation is the same as target 1 in the fourth bin, and
,
, where
. Besides the test echoes, another 1000 echoes are generated under the same parameter set and are used to train the GMM. The number of GMM components is
. The normalized histogram of the sum channel power of a sample which samples the echoes of only one scattering center is shown in
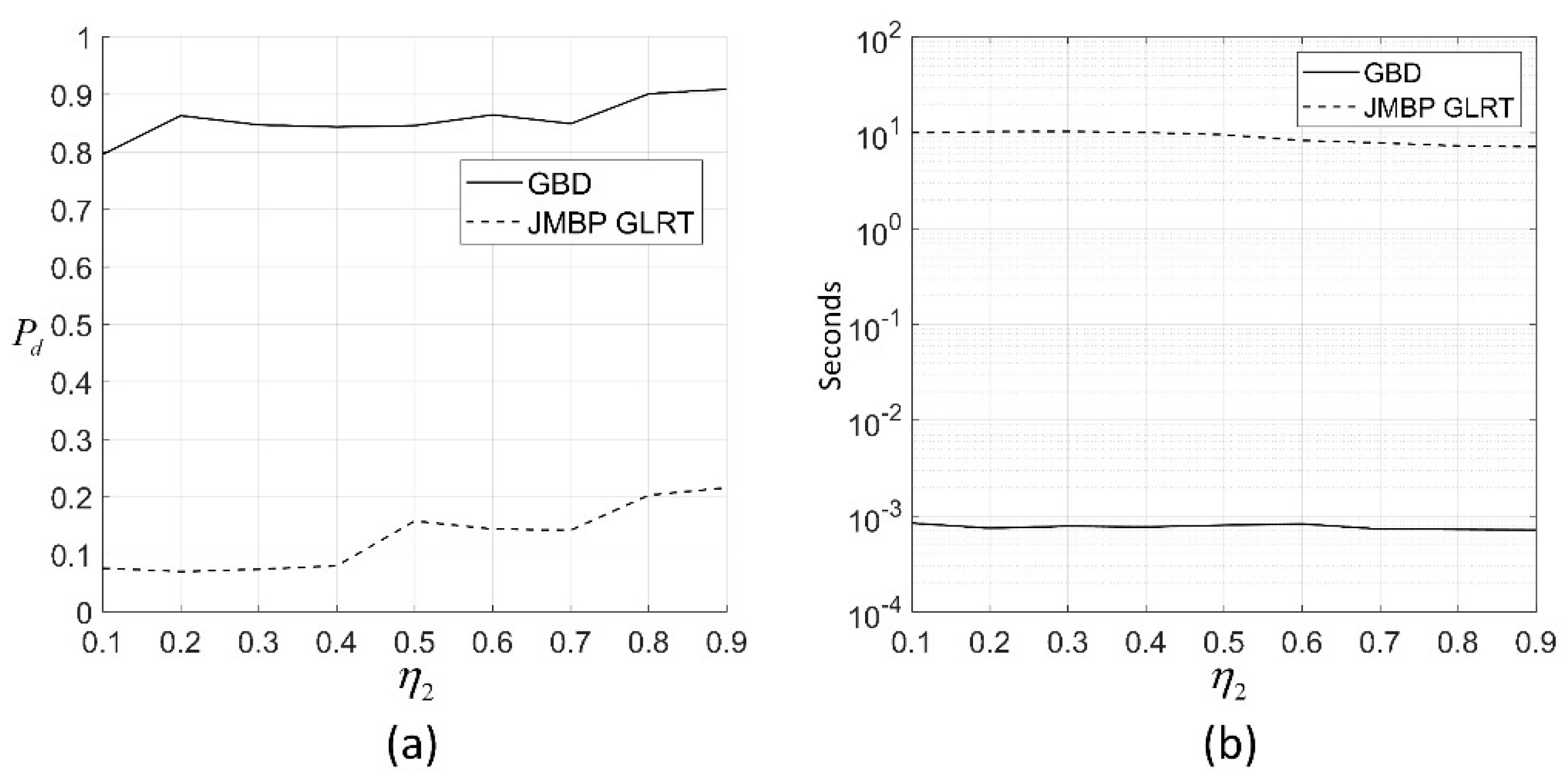
Figure 4, which is clearly bimodally distributed.
For each
, 1000 Monte Carlo simulations are performed for the two algorithms with the initial search point for JMBP GLRT being the true values of the scattering points. In this simulation, 6 pulses are used for detecting unresolved targets. On the echoes generated from the same distribution with identical parameters, the
s of the two algorithms under the same false alarm rate
is shown in
Figure 5a. As is shown, both of the
of the two algorithms rise as
increases, and GBD performs better. This is because the greater angular separation means a stronger unresolved target effect, and GBD is less sensitive to the mismatch of the signal model than JMBP GLRT, producing a significantly higher
than the latter one. The bimodally distributed data yields more spikes in the likelihood function for JMBP GLRT and, therefore, there is a degradation in the performance of JMBP GLRT.
In
Figure 5b, the computation time of GBD is between
s and
s, while the computation time of JMBP GLRT is between 7.2 s and 10.0 s under different
. This is because there is no ML solving in GBD. As
increases, the computation time of the two algorithms decreases. This is probably because a larger angular separation of the two targets yields a stronger effect of unresolved targets.
4.3. Simulation 3: Performance of GBD when there are more than Two Targets Unresolved
The JMBP GLRT is developed assuming only two targets are unresolved, but in real scenarios, there are probably more than two targets unresolved. In this section, we carry out a simulation to test the performance of GBD when there are more than two targets unresolved. For scenario 1, in which two targets are unresolved, target 2 and the fourth scattering center of target 1 is located in the fourth bin, and the parameters are
,
,
,
,
,
. For scenario 2, in which three targets are unresolved, target 2, target 3, and the fourth scattering center of target 1 are located in the fourth bin, and the parameters are
,
,
,
,
,
,
,
,
. For scenario 3, in which four targets are unresolved, target 2, target 3, target 4, and the fourth scattering center of target 1 are located in the fourth bin, and the target parameters are
,
,
,
,
,
,
,
,
,
,
,
. In this simulation, five pulses are used for detecting unresolved targets. Besides the test echoes, another 1000 echoes generated under the same parameters set are used to train the GMM, and the number of GMM components is
. The mean of
and
of the GBD in each scenario is shown in
Table 1. It can be seen in the table that as the number of targets unresolved increases, the
increases and the
decreases, which means the GBD performs better when more targets are unresolved. This is because the targets are of equal SNR and evenly located in range and angle, thus more targets cause stronger unresolved target effect.
As the unresolved target effect is the very factor that affects radar performance, the weaker unresolved target effect, caused by closely spaced unresolved targets for example, may result in the degradation of GBD performance, but its harmful effect to the radar will also degrade. That means the degradation of GBD performance caused by the weaker unresolved target effect may not necessarily degrade the radar tracking performance.
4.4. Experiment: Test on Measured Data
In this section, the performance of GBD is evaluated by field test measured data. The data collection experiment is shown in
Figure 6. In the experiment, the radar was installed ashore, the ship was at anchor, and a small ship carrying a corner reflector moved from the position shown in the figure across the ship in range dimension. The distance between the corner reflector and the ship in azimuth dimension is approximately 50 m, corresponding to
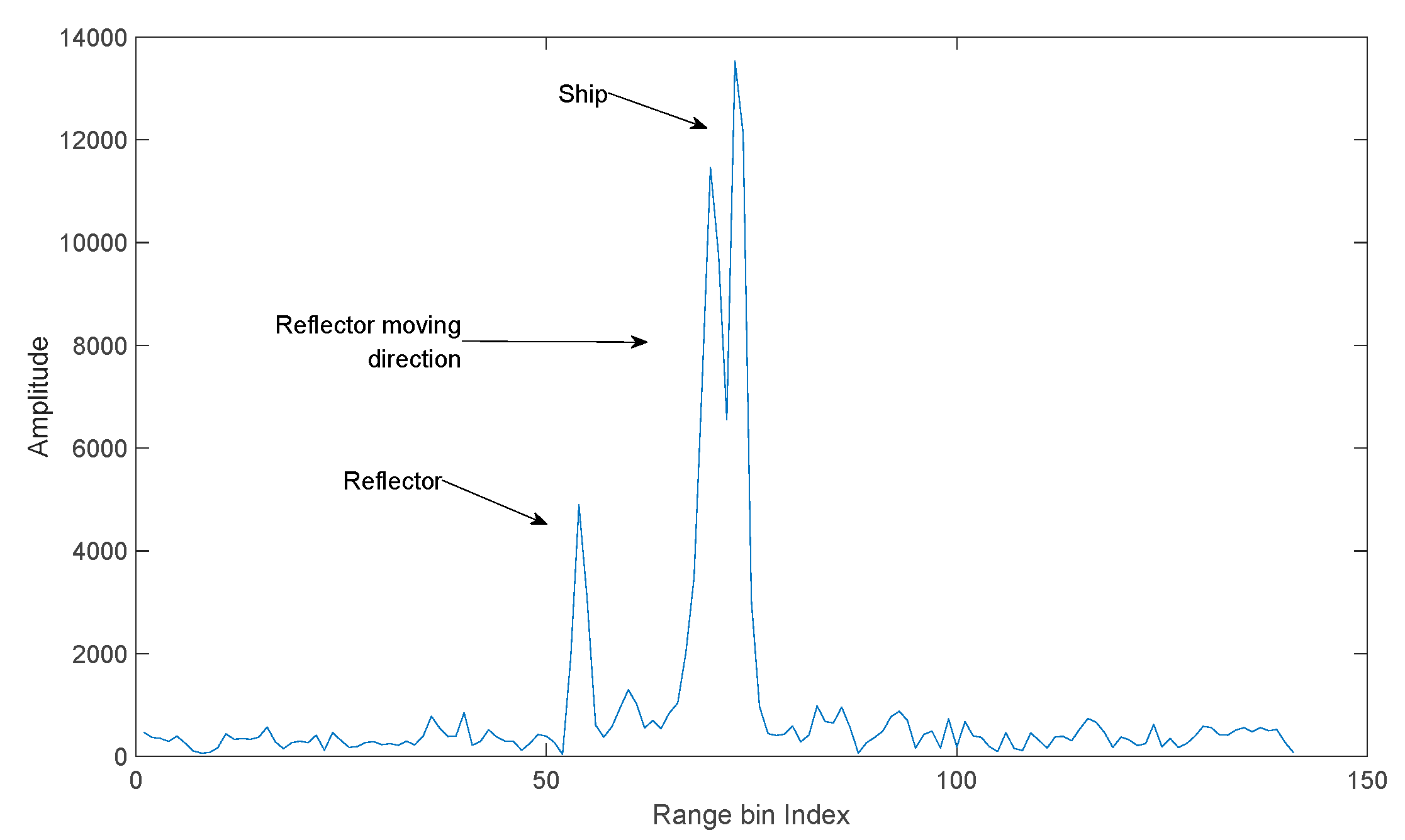
. When the reflector and some part of the ship are in the same range, a u-target is formed. The monopulse radar is in X band, and uses a linear frequency modulation (LFM) signal of 50 MHz bandwidth. During the experiment, the radar beam kept pointing at the ship. The range profiles of the ship and corner reflector produced by the radar are shown in
Figure 7. It is obvious in
Figure 7 that both the corner reflector and the ship occupy multiple range bins, but the JMBP GLRT is developed assuming that targets are within one range bin. Therefore, the assumption of JMBP GLRT cannot be satisfied and the algorithm is not suitable for the experiment. To provide a benchmark for evaluating the performance of GBD, instead of JMBP GLRT, GBD is compared with Blair GLRT [
7], a typical algorithm applicable to the experiment and the very algorithm compared with JMBP GLRT in the literature [
12].
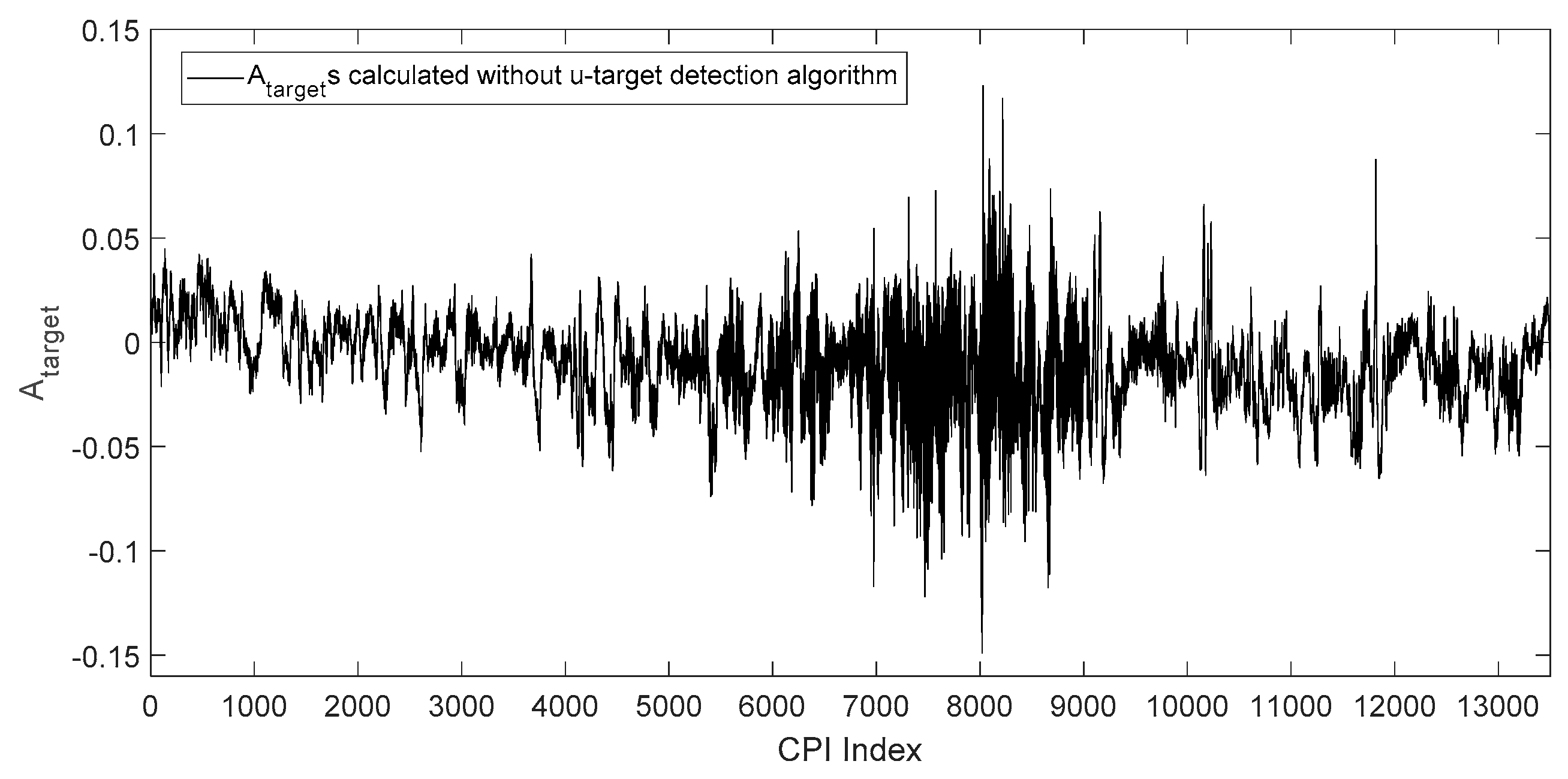
In the experiment, the radar processing period is the coherent processing interval (CPI), which means the u-target detection and target angle estimation is performed in every CPI. The target angle is estimated by a centroid method
In which
is the number of samples in the range profile of the target at time
. The target angles of each CPI estimated by Equation (31) without using u-target detection algorithm is shown in
Figure 8, in which the horizontal axis is the index of CPIs, corresponding to time, and the vertical axis is the
of each CPI. In
Figure 8, each angle estimate
is calculated by all range profile samples of the CPI that the
belongs to, which means no u-target samples is detected and removed before the
is calculated.
According to the experiment record, the u-target is formed within the time interval of CPI = 7000–9000. It can be seen in
Figure 8, that during this interval, the u-target caused a significantly larger angle glint than other CPIs. At time intervals other than CPI = 7000–9000, the ship and the corner reflector are resolvable in range (e.g.,
Figure 7.), and there are no unresolved targets.
To evaluate the performance of GBD on the measured data, the data above is used as the test data. For GBD, another 1000 ship echoes and 1000 unresolved target echoes sampled in the same scenario are used to train the ship GMM model and the unresolved targets GMM model, respectively, with the number of GMM components
. Set
, and with
set to suppress the false alarm rate. According to radar parameters, the system noise variance is set
, and the measurement noise variance
. The condition for deleting the track is that no unresolved targets are detected in more than five consecutive CPIs. For Blair GLRT, five consecutive range profiles are used for one detection, the false alarm rate is set to
and a fixed threshold is used to detect the range profile. The samples of u-targets are detected by GBD or Blair GLRT and are removed before calculating
with Equation (31). The curves of
is shown in
Figure 9.
It can be clearly seen in the figure that during period CPI = 7000–9000,
calculated with GBD has the smallest glint, and
calculated with Blair GLRT has a medium-scale glint. As samples of u-targets cause a larger glint than samples of resolved targets, the curves in
Figure 9 indicate that GBD correctly detected and removed more samples of unresolved targets than Blair GLRT, and reduced a more harmful effect of unresolved targets than Blair GLRT in angle estimation. To quantitatively evaluate the effect of GBD and Blair GLRT in radar angle estimation, we calculated the variance of angle estimations in typical time intervals shown in
Table 2.
It can be seen from the table that in the time interval CPI = 7000–9000 where the u-target exists, the calculated with GBD has the smallest variance, indicating that the GBD algorithm correctly removed more samples of large angular glint than Blair GLRT and therefore effectively suppressed the angular glint caused by the u-target. In time intervals CPI = 1–6000 and CPI = 10000–13000, targets are resolvable, which means samples being detected as u-target samples in these intervals are false alarms. In the two time intervals, compared with Blair GLRT, the variance of calculated with GBD is closer to the variance of calculated without u-target detection, indicating that GBD removed less samples of large glint than Blair GLRT, meaning that GBD has a lower false alarm rate than Blair GLRT. As one of the main effects of a u-target is increasing angular glint, and the GBD algorithm effectively reduced the effect, we can safely conclude that the GBD algorithm correctly detected samples of u-targets and effectively improved radar angle estimation performance in the presence of u-targets.
In the experiment, the average computation time of GBD in one CPI is s, while the average computation time of Blair GLRT in one CPI is s, so Blair GLRT is faster than GBD by five times. The two algorithms were programmed by MATLAB in a PC with Intel Core i5-8250 CPU @ 1.8 GHz, 8 GB memory, and a Windows 10 operation system.
Blair GLRT is a typical algorithm applicable to wideband radar. The experiment compared GBD with Blair GLRT on the basis of an LFM radar. As the signal models of the two algorithms are baseband signal models, the modulation of the radar signal has no major influence on the difference in performance of the two algorithms. If the two algorithms are applied to pseudo-noise sequence phase-coded radars, GBD will also have a higher detection probability and lower false alarm rate than Blair GLRT because GBD uses monopulse ratio and tracking information, while Blair GLRT only uses monopulse ratio. GBD also avoids the risk of model mismatch which Blair GLRT suffers in wideband radars. But the computation load of GBD is higher than Blair GLRT because the tracking function and GMM likelihood calculation of GBD takes more computation than the Neyman–Person test of Blair GLRT. The experiment results show that the MATLAB version of GBD takes approximately 0.2 ms to complete detections on a range profile, a time length already comparable to data acquisition periods. In our coding experience, a C language version will run much faster than a MATLAB version, and therefore, the computation time of GBD can be further reduced, meaning GBD has the potential to meet the computation time requirement of real-time processing.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}