Implementation and Evaluation of a Wide-Range Human-Sensing System Based on Cooperating Multiple Range Image Sensors

Abstract
:1. Introduction
2. System
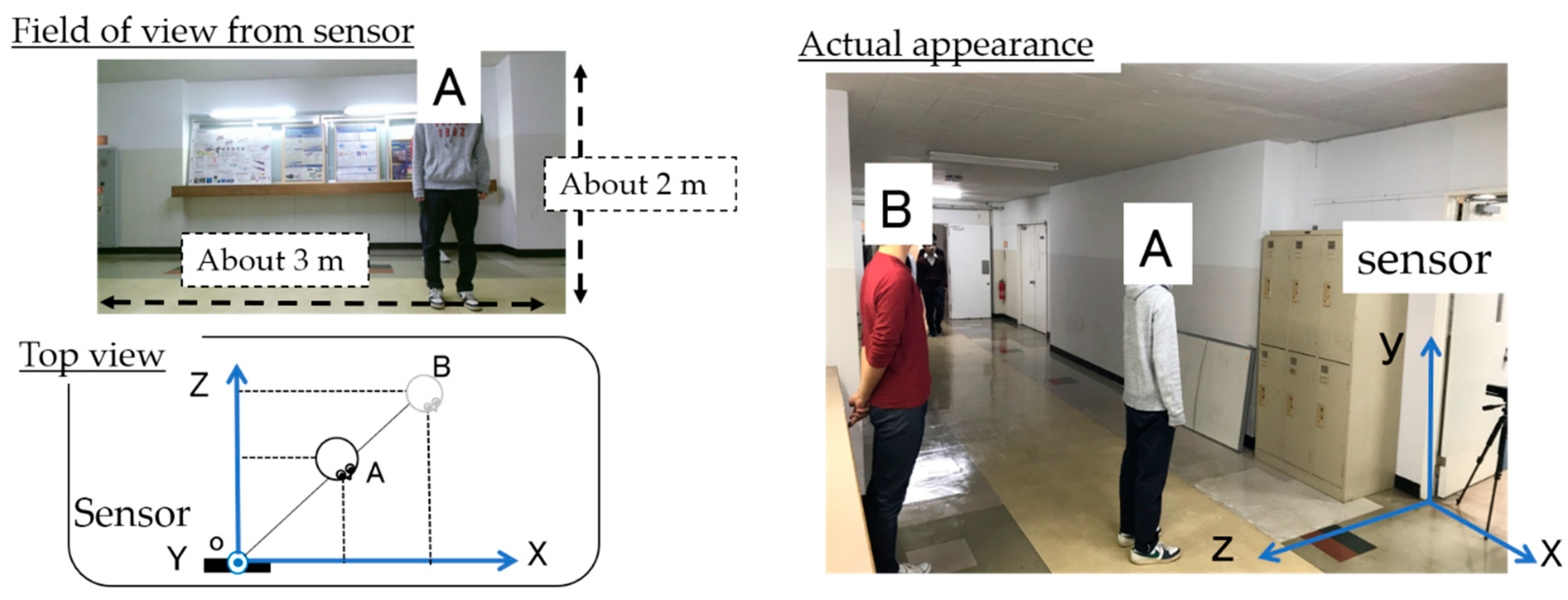
2.1. System Overview
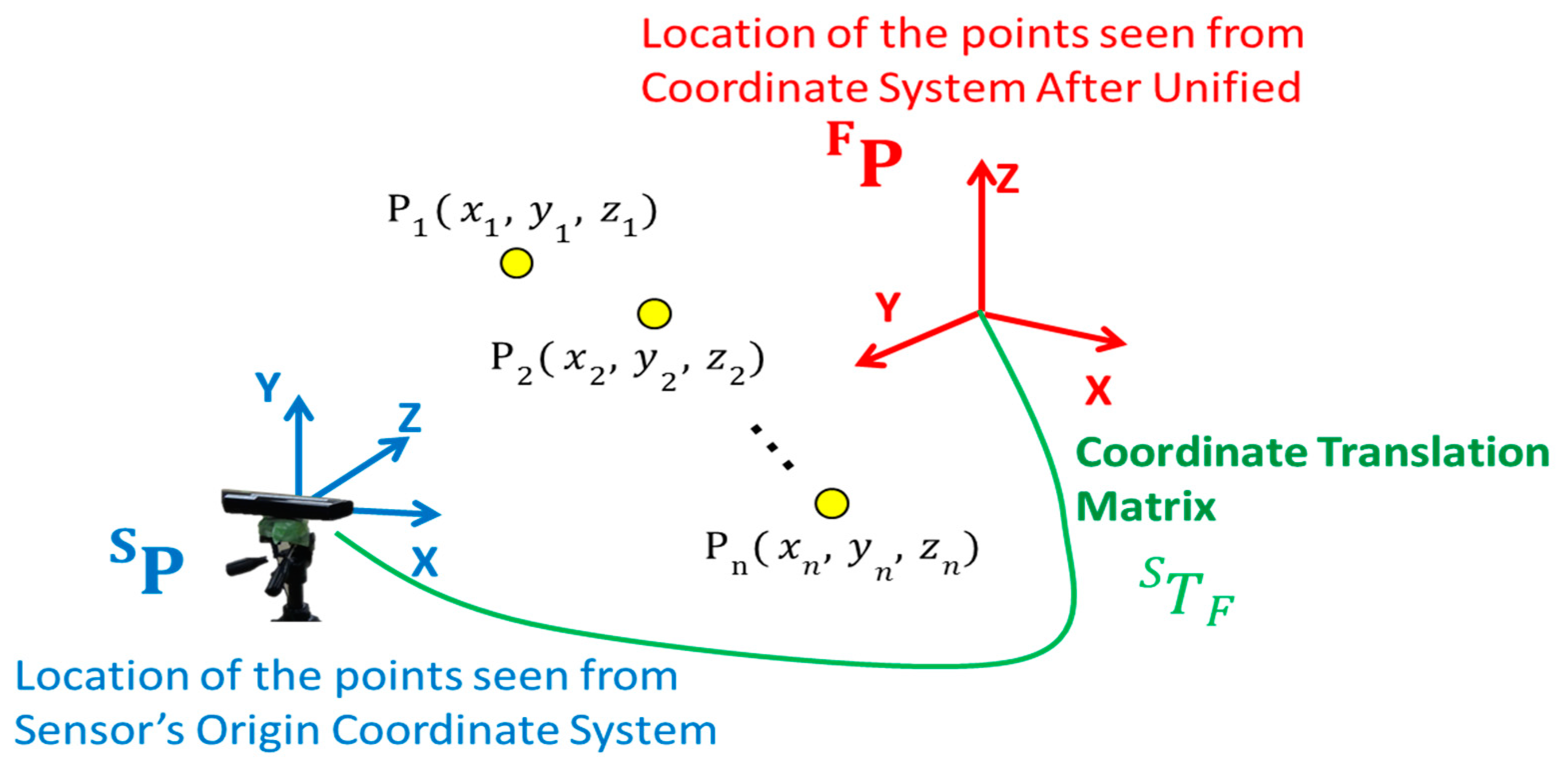
2.2. Coordinate Transformation Using Simultaneous Transformation Matrix
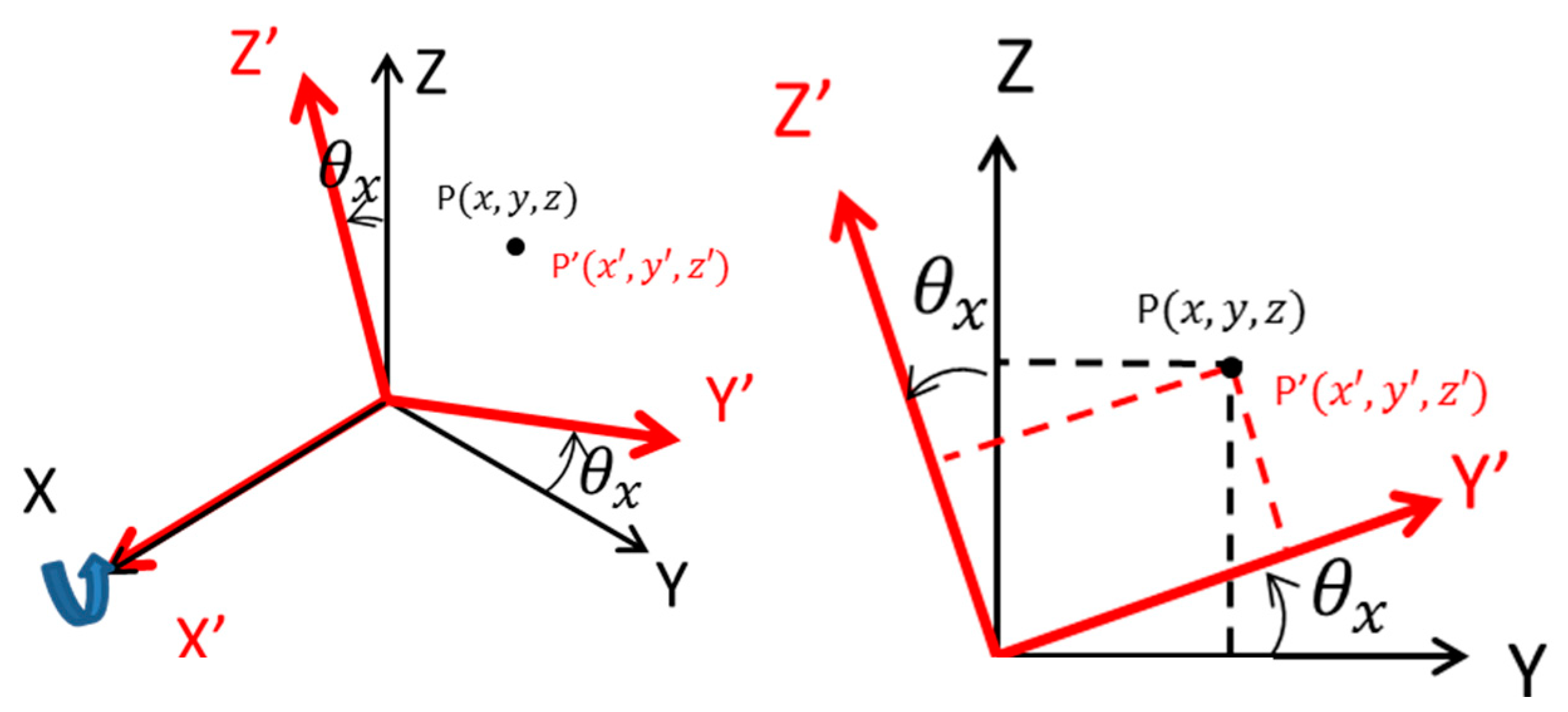
2.2.1. Coordinate Transformation
2.2.2. Method of Coordinate Transformation Using Simultaneous Transformation Matrix
2.3. Time Synchronization
2.3.1. Summary
2.3.2. Time Synchronization Using Unified Clock
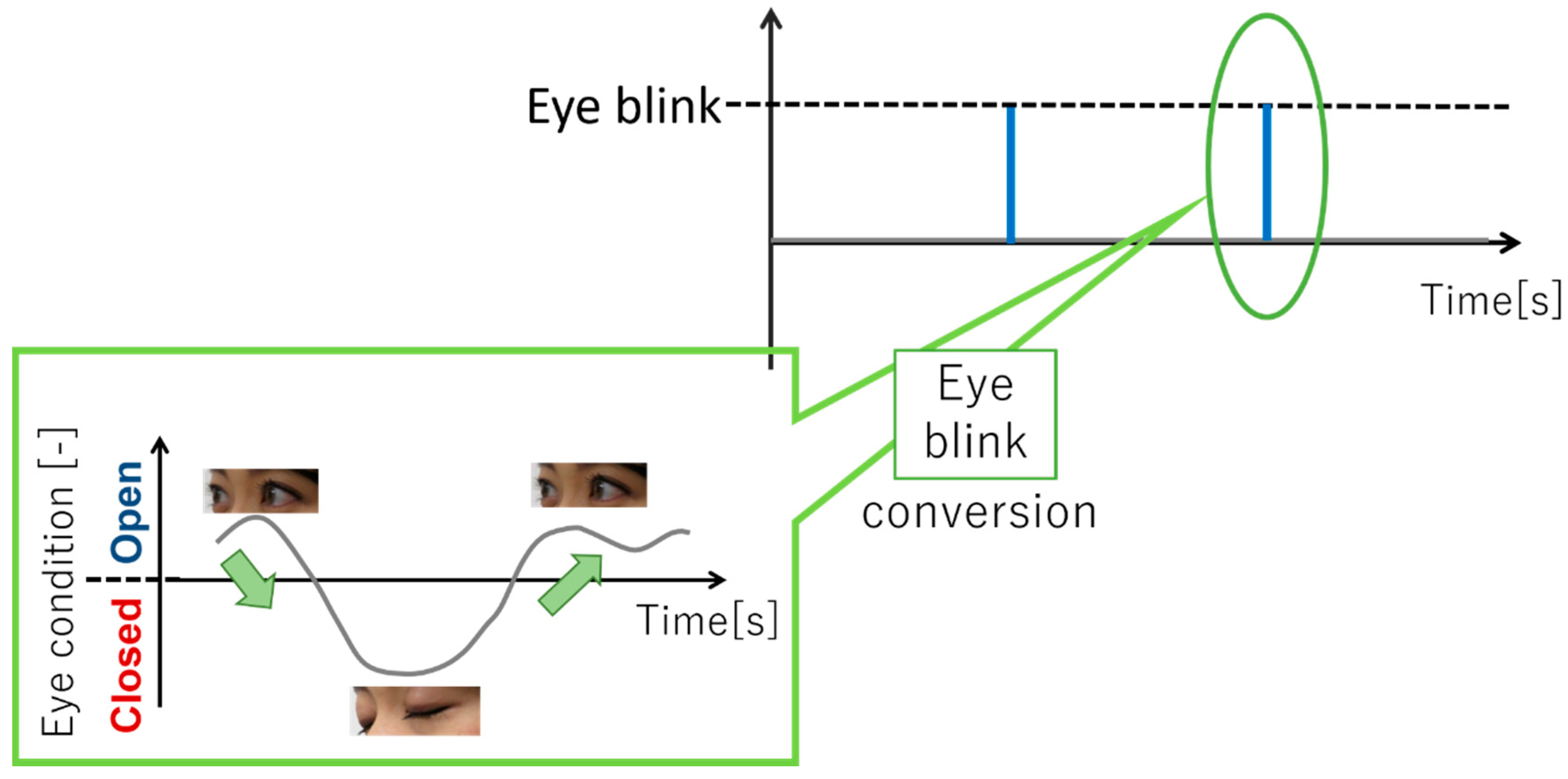
2.4. Eye Blink Detection
3. Experiments
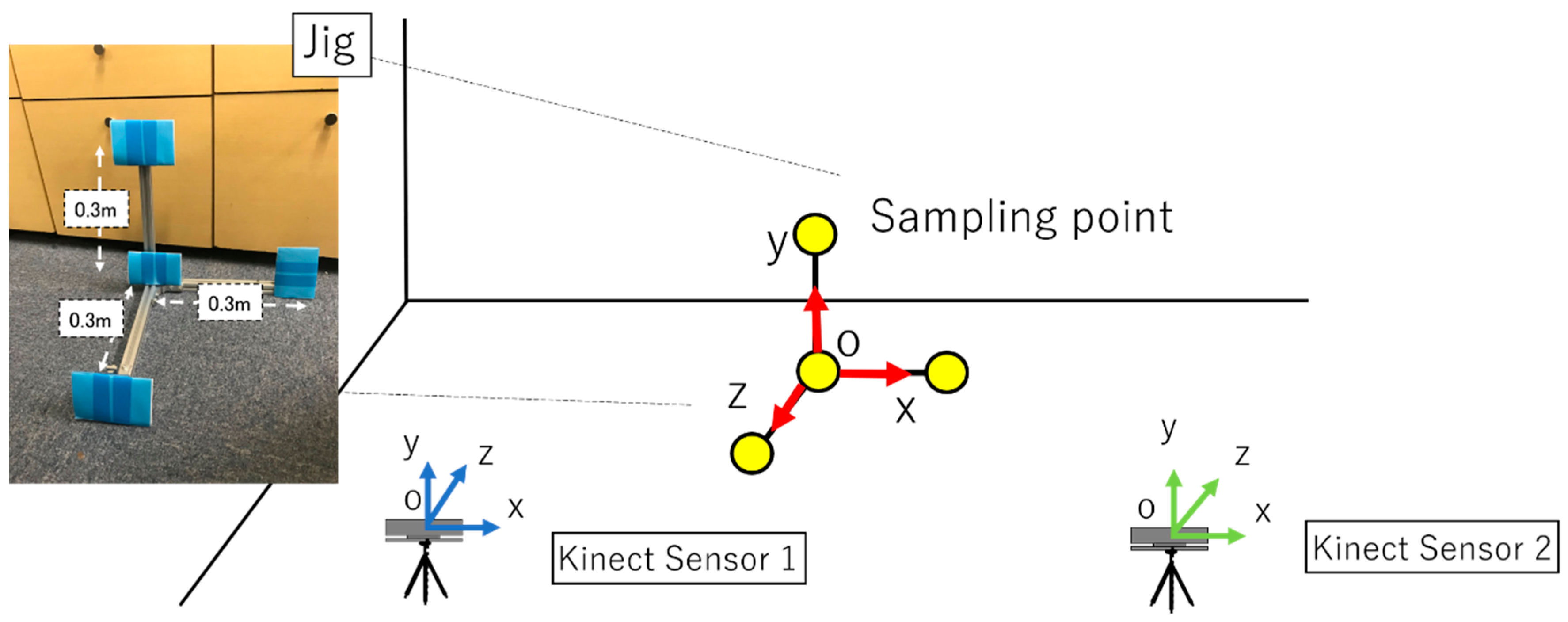
3.1. Coordinate Transformation
3.1.1. Evaluation Experiment of Coordinate Transformation
3.1.2. Evaluation Experiment Result of Coordinate Transformation
3.2. Evaluation Experiment on Time Synchronization
3.2.1. Evaluation Experiment of Range of Measurement
3.2.2. Experimental Result
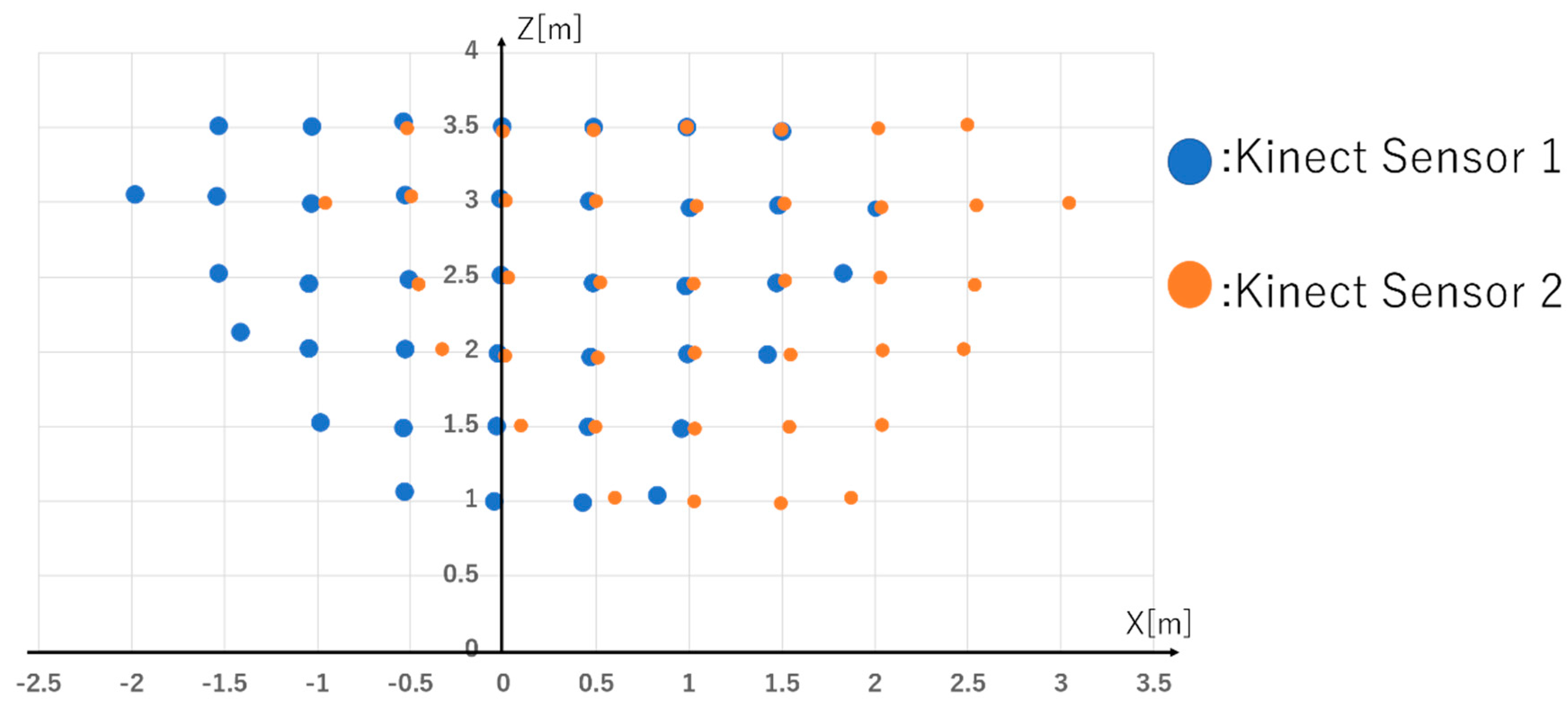
3.3. Range of Measurement
3.3.1. Evaluation Experiment of Range of Measurement
3.3.2. Evaluation Experiment Result of Range of Measurement
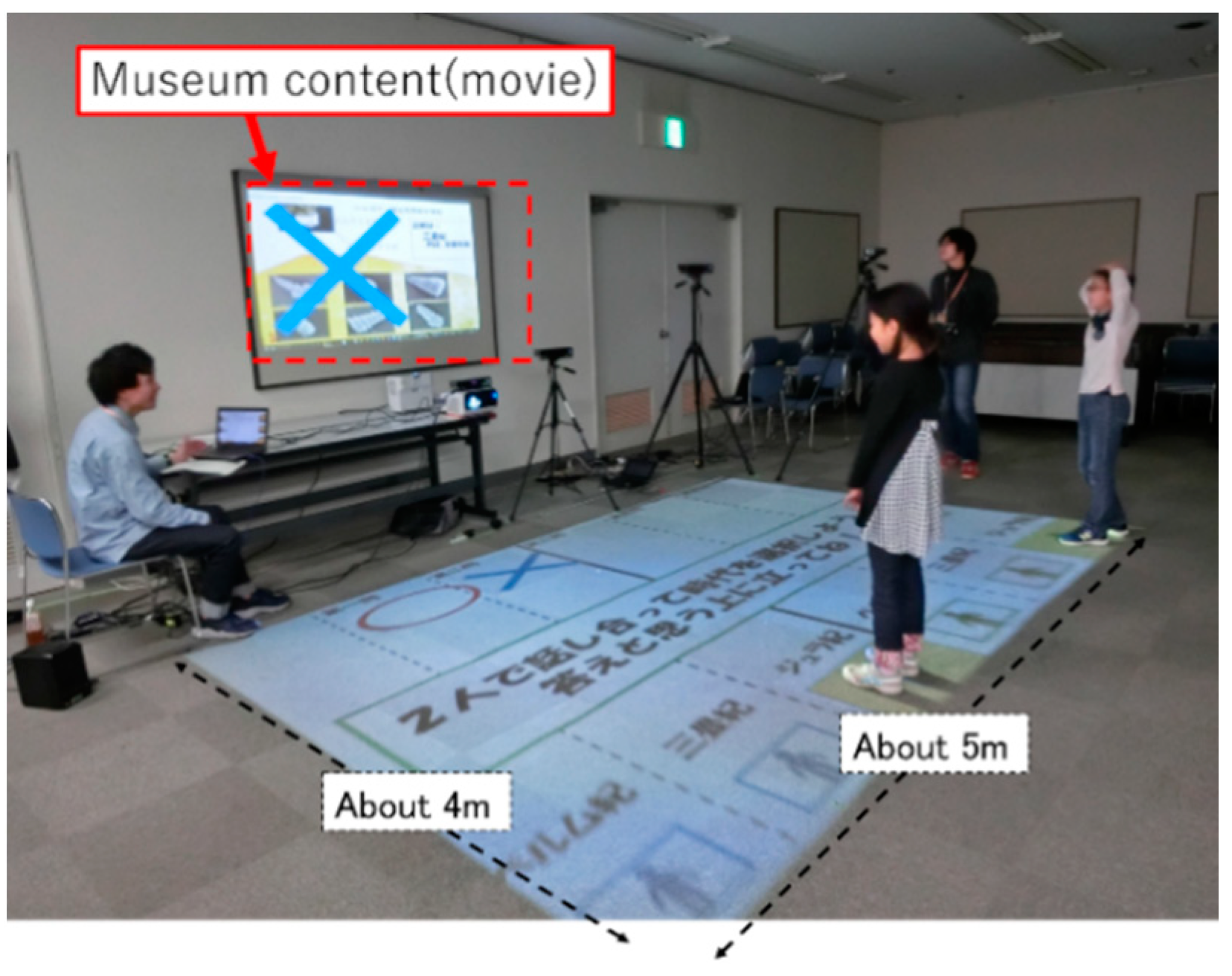
3.4. Evaluation Experiment of Contents
3.4.1. Experimental Method
3.4.2. Experimental Result
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Falk, J.H.; Dierking, L.D. Museum Experience Revisited, 2nd ed.; Left Coast Press: Walnut Creek, CA, USA, 2012. [Google Scholar]
- Hein, G.E. Learning in the Museum; Routledge: Abingdon, UK, 2002. [Google Scholar]
- Sheng, C.-W.; Chen, M.-C. A study of experience expectations of museum visitors. Tour. Manag. 2012, 33, 53–60. [Google Scholar] [CrossRef]
- Nakayama, T.; Yoshida, R.; Nakadai, T.; Ogitsu, T.; Mizoguchi, H.; Izuishi, K.; Kusunoki, F.; Muratsu, K.; Inagaki, S. Novel Application of Kinect Sensor for Children to Learn Paleontological Environment -Learning Support System based on Body Experience and Sense of Immersion. In Proceedings of the 8th International Conference on Sensing Technology (ICST 2014), Liverpool, UK, 2–4 September 2014; p. #S7-8 (1)-(4), (USB Memory). [Google Scholar]
- Yoshida, R.; Egusa, R.; Saito, M.; Namatame, M.; Sugimoto, M.; Kusunoki, F.; Yamaguchi, E.; Inagaki, S.; Takeda, Y.; Mizoguchi, H. BESIDE: Body Experience and Sense of Immersion in Digital paleontological Environment. In Proceedings of the International Conference on Human-Computer Interaction (CHI2015) Extended Abstracts, Seoul, Korea, 18–23 April 2015; pp. 1283–1288. [Google Scholar]
- Tamaki, H.; Sakai, T.; Yoshida, R.; Egusa, R.; Inagaki, S.; Yamaguchi, E.; Kusunoki, F.; Namatame, M.; Sugimoto, M.; Mizoguchi, H. Science education enhancement within a museum using computer-human interaction technology. In Proceedings of the 8th International Conference on Computer Supported Education (CSEDU2016), Rome, Italy, 21–23 April 2016; Volume 2, pp. 181–185. [Google Scholar]
- Tokuoka, M.; Tamaki, H.; Sakai, T.; Mizoguchi, H.; Egusa, R.; Inagaki, S.; Kawabata, M.; Kusunoki, F.; Sugimoto, M. BELONG: Body Experienced Learning Support System based on Gesture—Enhancing the Sense of Immersion in a Dinosaurian Environment. In Proceedings of the 9th International Conference on Computer Supported Education (CSEDU2017), Porto, Portugal, 21–23 April 2017; Volume 1, pp. 487–492. [Google Scholar]
- Tan, T.-H.; Liu, T. The mobile-based interactive learning environment (MOBILE) and a case study for assisting elementary school English learning. In Proceedings of the IEEE International Conference on Advanced Learning Technologies, Joensuu, Finland, 30 August–1 September 2004; pp. 530–534. [Google Scholar]
- Fusako, K.; Sugimoto, M.; Hashizume, H. Toward an interactive museum guide system with sensing and wireless network technologies. In Proceedings of the IEEE International Workshop on Wireless and Mobile Technologies in Education, Växjö, Sweden, 29–30 August 2002; pp. 99–102. [Google Scholar]
- Yoshida, R.; Nakayama, T.; Ogitsu, T.; Takemura, H.; Mizoguchi, H.; Yamaguchi, E.; Inagaki, S.; Takeda, Y.; Namatame, M.; Sugimoto, M.; et al. Feasibility Study on Estimating Visual Attention using Electrodermal Activity. In Proceedings of the 8th International Conference on Sensing Technology (ICST 2014), Liverpool, UK, 2–4 September 2014; pp. 589–592. [Google Scholar]
- Lewis, G.W.; David, L.R.-J. Evaluation of a Subject’s Interest in Education, Training and other Materials Using Brain Activity Patterns. U.S. Patent No. 5,762,611, 9 June 1998. [Google Scholar]
- Bang, J.W.; Lee, E.C.; Park, K.R. New computer interface combining gaze tracking and brainwave measurements. IEEE Trans. Consum. Electron. 2011, 57, 1646–1651. [Google Scholar] [CrossRef]
- Zhan, Z.; Zhang, L.; Mei, H.; Fong, P.S. Online learners’ reading ability detection based on eye-tracking sensors. Sensors 2016, 16, 1457. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.C.; Luong, D.T.; Cho, C.W.; Lee, E.C.; Park, K.R. Gaze tracking system at a distance for controlling IPTV. IEEE Trans. Consum. Electron. 2010, 56, 2577–2583. [Google Scholar] [CrossRef]
- Wang, F.; Zhou, M.; Zhu, B. A Novel Feature Based Rapid Eye State Detection Method. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics, Guilin, China, 19–23 December 2009; pp. 1236–1240. [Google Scholar]
- Harini, V.; Papanikolopoulos Nikolaos, P. Detecting Driver Fatigue through the Use of Advanced Face Monitoring Techniques; University of Minnesota-Twin Cities: Minneapolis, MN, USA, 2001. [Google Scholar]
- Ryu, J.B.; Hyun, A.Y.; Seo, Y. Real Time Eye Blinking Detection Using Local Ternary Pattern and SVM. In Proceedings of the International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Compiegne, France, 28–30 October 2013; pp. 598–601. [Google Scholar]
- Le, H.; Dang, T.; Liu, F. Eye Blink Detection for Smart Glasses. In Proceedings of the 2013 IEEE International Symposium on Multimedia (ISM’13), Anaheim, CA, USA, 9–11 December 2013; pp. 305–308. [Google Scholar]
- Alioua, N.; Amine, A.; Rziza, M.; Aboutajdine, D. Eye state analysis using iris detection based on Circular Hough Transform. In Proceedings of the 2011 International Conference on Multimedia Computing and Systems (ICMCS), Ouarzazate, Morocco, 7–9 April 2011; pp. 1–5. [Google Scholar]
- Lu, Y.; Li, C. Recognition of driver eyes’ states based on variance projections function. In Proceedings of the IEEE Conference of 3rd International Congress on Image and, Signal Processing, Yantai, China, 16–18 October 2010; pp. 1919–1922. [Google Scholar]
- Frutos-Pascual, M.; Begonya, G. Assessing visual attention using eye tracking sensors in intelligent cognitive therapies based on serious games. Sensors 2015, 15, 11092–11117. [Google Scholar] [CrossRef] [PubMed]
- Holland, M.K.; Tarlow, G. Blinking and thinking. Percept. Mot. Skills 1975, 41, 403–406. [Google Scholar] [CrossRef]
- Wood, J.; Hassett, J. Eyeblinking during problem solving: The effect of problem difficulty and internally vs externally directed attention. Psycho-Physiology 1983, 21, 18–20. [Google Scholar] [CrossRef]
- Kim, D.; Choi, S.; Park, S.; Sohn, K. Stereoscopic Visual Fatigue Measurement Based on Fusional Response curve and Eye-blinks. In Proceedings of the 17th International Conference on Digital Signal Processing, Corfu, Greece, 6–8 July 2011; pp. 1–6. [Google Scholar]
- Shotton, J.; Sharp, T.; Kipman, A.; Fitzgibbon, A.; Finocchio, M.; Blake, A.; Moore, R. Real-time human pose recognition in parts from single depth images. Commun. ACM 2013, 56, 116–124. [Google Scholar] [CrossRef]
- Kaenchan, S.; Mongkolnam, P.; Watanapa, B.; Sathienpong, S. Automatic multiple kinect cameras setting for simple walking posture analysis. In Proceedings of the 2013 International Computer Science and Engineering Conference (ICSEC), Bangkok, Thailand, 4–6 September 2013; pp. 245–249. [Google Scholar]
- Yang, R.S.; Chan, Y.H.; Gong, R.; Nguyen, M.; Strozzi, A.G.; Delmas, P.; Ababou, R. Multi-Kinect scene reconstruction: Calibration and depth inconsistencies. In Proceedings of the 2013 28th International Conference on Image and Vision Computing New Zealand (IVCNZ), Wellington, New Zealand, 27–29 November 2013; pp. 47–52. [Google Scholar]
- Ganapathy, S. Decomposition of transformation matrices for robot vision. Pattern Recognit. Lett. 1984, 2, 401–412. [Google Scholar] [CrossRef]
- Huang, Z.; Nagata, A.; Kanai-Pak, M.; Maeda, J.; Kitajima, Y.; Nakamura, M.; Ota, J. Automatic evaluation of trainee nurses’ patient transfer skills using multiple kinect sensors. IEICE Trans. Inf. Syst. 2014, 97, 107–118. [Google Scholar] [CrossRef]
- Saputra, M.R.; Guntur, D.P.; Paulus, I.S. Indoor human tracking application using multiple depth-cameras. In Proceedings of the 2012 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Depok, Indonesia, 1–2 December 2012. [Google Scholar]
- Cafaro, A.; Wagner, J.; Baur, T.; Dermouche, S.; Torres Torres, M.; Pelachaud, C.; Valstar, M. The NoXi database: Multimodal recordings of mediated novice-expert interactions. In Proceedings of the 19th ACM International Conference on Multimodal Interaction, Glasgow, Scotland, 13–17 November 2017; pp. 350–359. [Google Scholar]
- Ishii, M.; Isogai, F.; Iizuka, S.; Amano, S. Fundamental Studies on Planning Clothes for Infants (Part 2). J. Home Econ. Jpn. 1975, 26, 402–407. [Google Scholar]
- Królak, A.; Paweł, S. Eye-blink detection system for human–computer interaction. Univers. Access Inf. Soc. 2012, 11, 409–419. [Google Scholar] [CrossRef]
- Tokuoka, M.; Komiya, N.; Mizoguchi, M.; Egusa, R.; Inagaki, S.; Kusunoki, F. Application of 3D Range Image Sensor to Body Movement Detection—Supporting Children’s Collaborative Learning in Museums. In Proceedings of the 2018 Twelfth International Conference on Sensing Technology (ICST2018), Limerick, Ireland, 4–6 December 2018; pp. 394–398. [Google Scholar]
- Tsugunosuke, S.; Ryuichi, Y.; Haruya, T.; Takeki, O.; Hiroshi, T.; Hiroshi, M.; Etsuji, Y.; Shigenori, I.; Yoshiaki, T.; Miki, N.; et al. Electrodermal Activity Based Study on the Relationship between Visual Attention and Eye Blink. In Proceedings of the 2015 Ninth International Conference on Sensing Technology (ICST2015), Auckland, New Zealand, 8–10 December 2015; pp. 639–642. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X [cm] | −2.0 | −1.5 | −1.0 | −0.5 | 0 | 0.5 | 1 | 1.5 | 2.0 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Z [cm] | ||||||||||
| 0 | - | - | - | - | - | - | - | - | - | |
| 0.5 | - | - | - | - | - | - | - | - | - | |
| 1 | - | - | - | 10.35 | 2.47 | 1.31 | 1.31 | - | - | |
| 1.5 | - | - | 9.35 | 0.489 | 2.98 | 3.78 | 3.67 | - | - | |
| 2.0 | - | 16.92 | 2.74 | 3.87 | 2.98 | 4.52 | 4.02 | 8.09 | - | |
| 2.5 | - | 6.25 | 2.64 | 4.07 | 4.83 | 2.84 | 2.48 | 5.20 | - | |
| 3.0 | 4.10 | 4.03 | 1.78 | 1.00 | 4.55 | 1.21 | 4.57 | 6.19 | 4.36 | |
| 3.5 | - | 2.03 | 2.38 | 2.22 | 1.52 | 1.28 | 1.56 | 2.09 | - | |
| Start of Experiment | End of Experiment | Result | ||||
|---|---|---|---|---|---|---|
| Unified Time [s] | Kinect Time [s] | Unified Time [s] | Kinect Time [s] | Elapsed Time (Unified Time) [s] | Elapsed Time (Kinect Time) [s] | |
| Kinect Sensor 1 | 0 | 2.091 | 53.000 | 55.045 | 53.000 | 52.954 |
| Kinect Sensor 2 | 0 | 3.979 | 53.000 | 57.012 | 53.000 | 53.033 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|
| Eye blink rate | 19.92 | 5.37 | 23.48 | 3.75 | 19.48 | 11.80 | 54.40 | 3.69 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tokuoka, M.; Komiya, N.; Mizoguchi, H.; Egusa, R.; Inagaki, S.; Kusunoki, F. Implementation and Evaluation of a Wide-Range Human-Sensing System Based on Cooperating Multiple Range Image Sensors. Sensors 2019, 19, 1172. https://doi.org/10.3390/s19051172
Tokuoka M, Komiya N, Mizoguchi H, Egusa R, Inagaki S, Kusunoki F. Implementation and Evaluation of a Wide-Range Human-Sensing System Based on Cooperating Multiple Range Image Sensors. Sensors. 2019; 19(5):1172. https://doi.org/10.3390/s19051172
Chicago/Turabian StyleTokuoka, Mikihiro, Naoki Komiya, Hiroshi Mizoguchi, Ryohei Egusa, Shigenori Inagaki, and Fusako Kusunoki. 2019. "Implementation and Evaluation of a Wide-Range Human-Sensing System Based on Cooperating Multiple Range Image Sensors" Sensors 19, no. 5: 1172. https://doi.org/10.3390/s19051172