Analysis of the Relationship between Turning Signal Detection and Motorcycle Driver’s Characteristics on Urban Roads; A Case Study



Abstract
:1. Introduction
1.1. Literature on Motorcycles Crash
1.2. Literature on Turn Signals Perception
2. Materials and Methods
- Samsung gear 360 camera;
- Samsung gear VR visor;
- GoPro hero 3;
- Samsung galaxy s7 G-930F;
- Action Director Software.
2.1. In-Situ Simulations
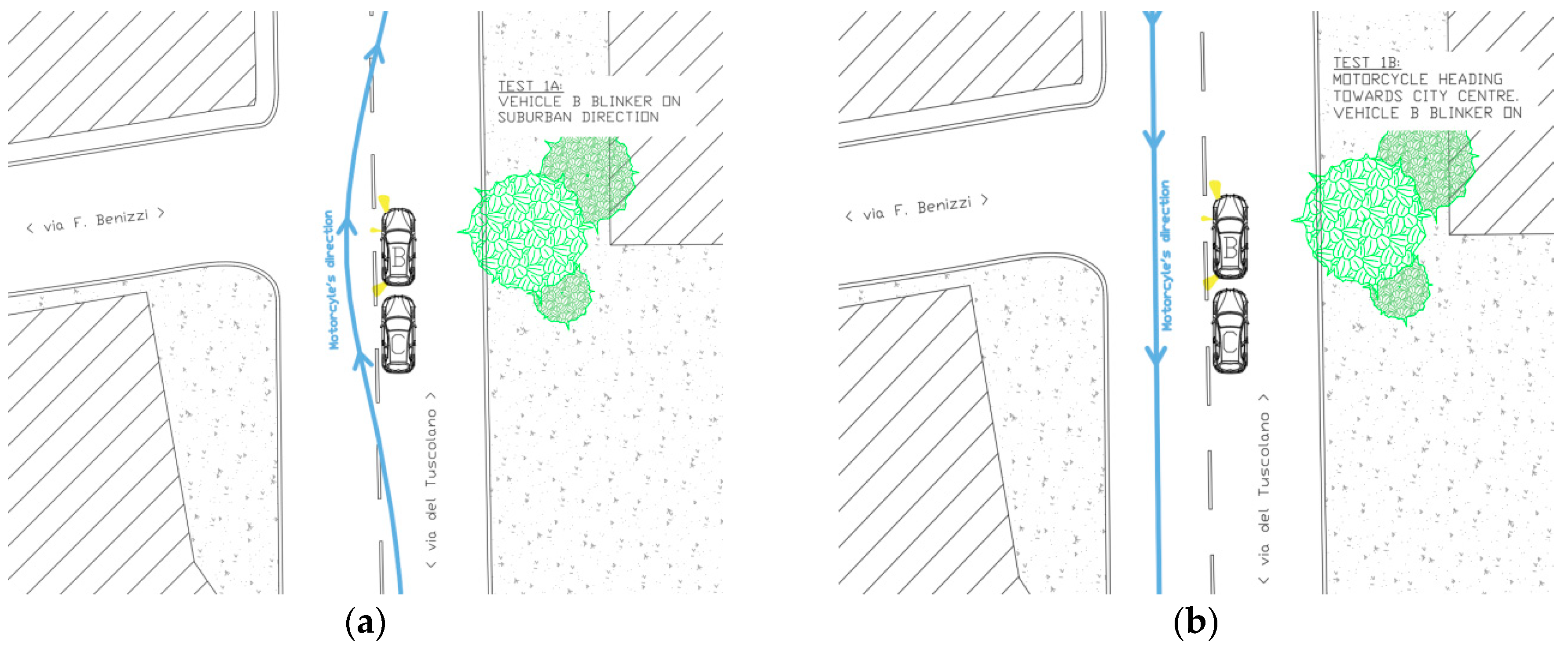
2.1.1. Simulation 1 (Urban Intersection)
- (a)
- The vehicle B was stationary at an intersection, in preselection position, with the turning signal on ON. The vehicle C was stationary at intersection, behind the vehicle B, with the turning signal on OFF. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading from city center towards suburbs area and during the overtaking of the two vehicles B and C the blinker of the motorcycle was turned ON.
- (b)
- The motorcyclist, after the roundabout was entirely travelled, honked the horn to report the beginning of the second part of the simulation. The motorcycle (vehicle A) drove (~50 km/h) along the main road heading from suburbs areas towards the city center. The vehicle B had the turning signal on ON. The vehicle C is in the same position as the simulation 1a.
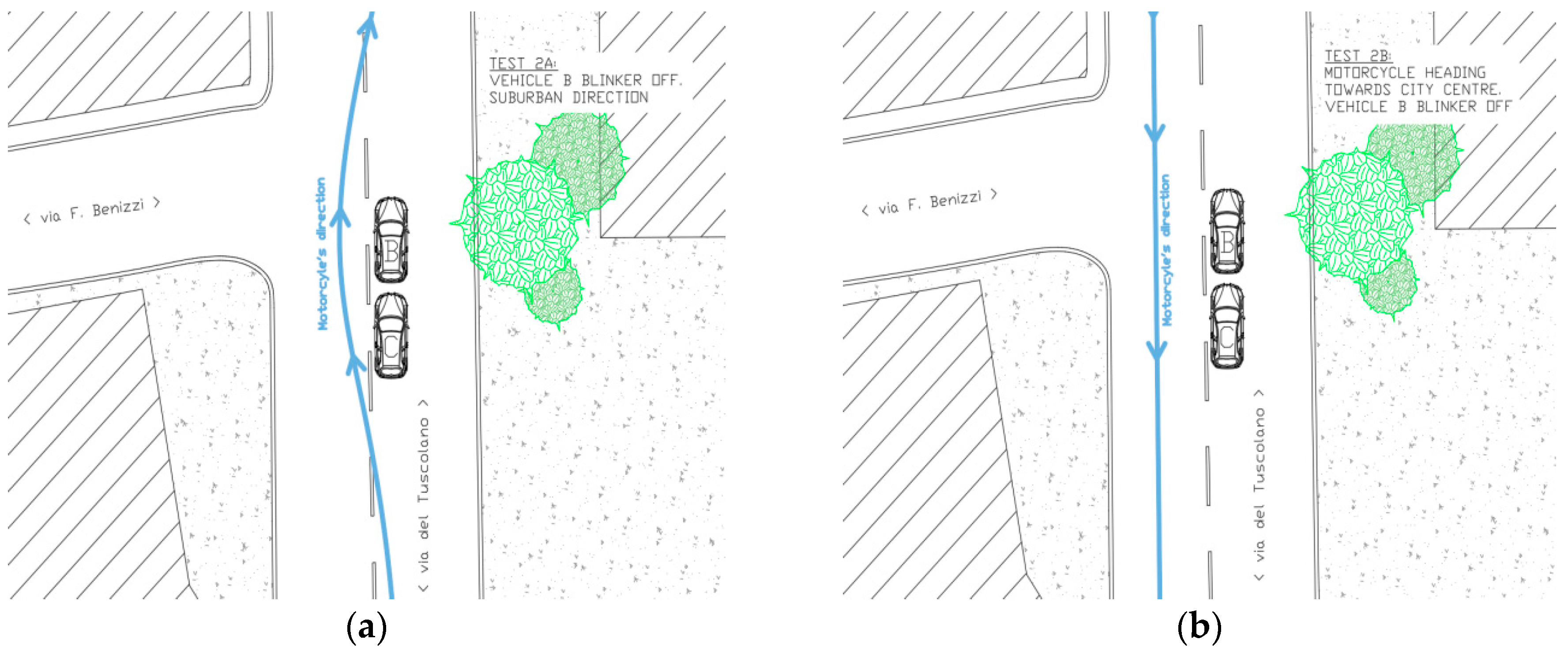
2.1.2. Simulation 2 (Urban Intersection)
- (a)
- The vehicle B was stationary at an intersection, in preselection position, with the turning signal on OFF. The vehicle C was stationary at intersection, behind the vehicle B, with the turning signal on OFF. The motorcycle (vehicle A) drove (~50 km/h) along the main road heading from city center towards suburbs area and during the overtaking of the two vehicles B and C the blinker of the bike was turned OFF.
- (b)
- The motorcyclist, after the roundabout has been entirely travelled, honked the horn to signalize the beginning of the second part of the simulation. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading from suburbs areas towards city center. The vehicle B had the turning signal on OFF. The vehicle C was in the same position as the simulation 2a.
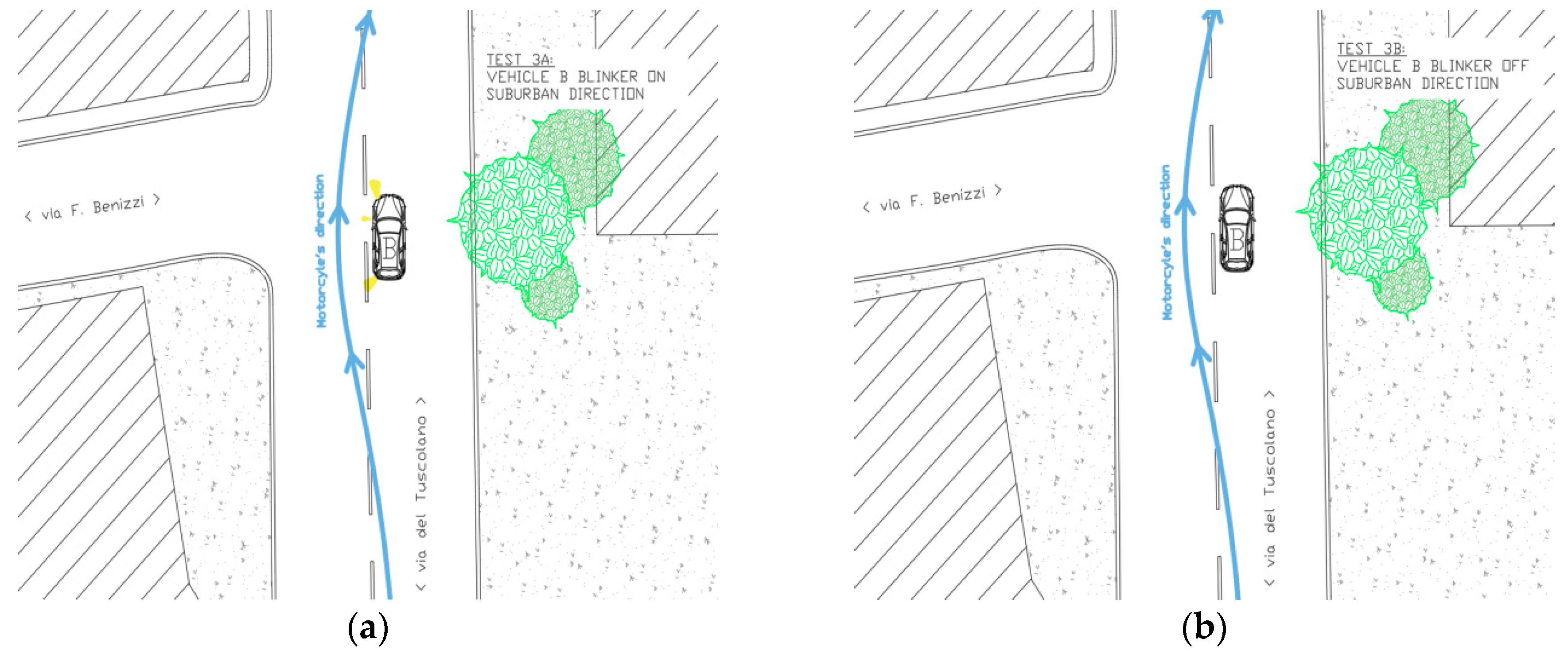
2.1.3. Simulation 3 (Urban Intersection)
- (a)
- The vehicle B was stationary at an intersection, in preselection position, with the turning signal on ON. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading from city center towards suburbs area and during the overtaking of the vehicle B the blinker of the motorcycle was turned ON.
- (b)
- The vehicle B was stationary at an intersection with the turning signal on OFF. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading from city center towards suburbs area and during the overtaking of the vehicle B the blinker of the bike was turned OFF.
2.1.4. Simulation 4 (Suburban Intersection)
- (a)
- The vehicle B was stationary at an intersection, in preselection position, with the turning signal on ON. The vehicle C was stationary at intersection, behind the vehicle B, with the turning signal on OFF. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading westbound and during the overtaking of the two vehicles B and C the blinker of the motorcycle was turned ON.
- (b)
- The motorcyclist, after a U turn, honked the horn to report the beginning of the second part of the simulation. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading eastbound direction. The vehicle B had the turning signal on ON. The vehicle C is in the same position as in the simulation 4a.
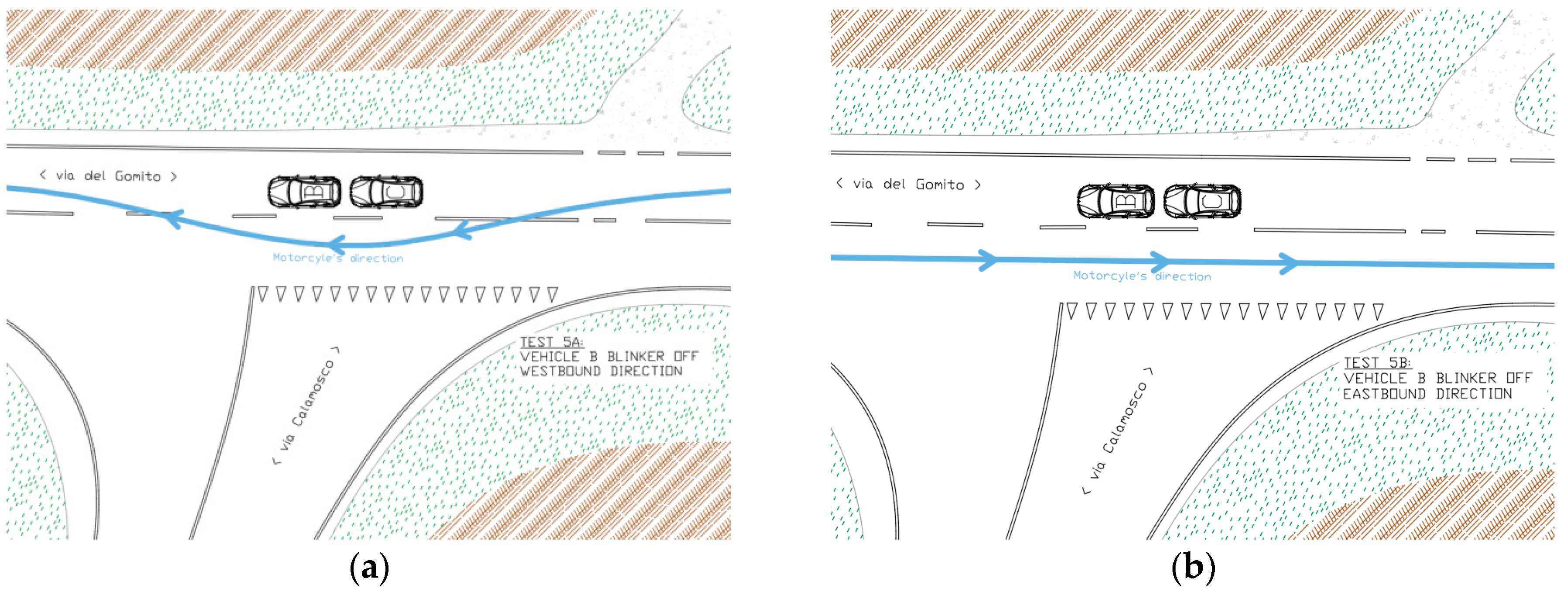
2.1.5. Simulation 5 (Suburban Intersection)
- (a)
- The vehicle B was stationary at intersection, in preselection position. with the turning signal on OFF. The vehicle C was stationary at intersection, behind the vehicle B, with the turning signal on OFF. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading westbound and during the overtaking of the two vehicles B and C the blinker of the motorcycle bike is OFF.
- (b)
- The motorcyclist, after a U turn, honked the horn to signalize the beginning of the second part of the simulation. The motorcyclist (vehicle A) drove (~50 km/h) along the main road heading eastbound. The vehicle B had the turning signal OFF. The vehicle C was in the same position as in the simulation 2a.
2.2. Survey Design, Test Campaign and Data Collection
2.3. Data Analysis: Logistic Regression Model
3. Results
3.1. Description of the Variables
3.2. Model Estimation
4. Model Interpretation and Discussion
4.1. Impact of Being Habitual Cyclist on Turning Signal Detection
4.2. Impact of Being a Habitual Car Driver on Turning Signal Detection
4.3. Impact of Age on Turning Signal Detection
4.4. Impact of Presence of An Occluding Car on Turning Signal Detection
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2015. Available online: http://www.who.int/violence_injury_prevention/road_safety_status/2015/GSRRS2015_Summary_EN_final2.pdf?ua=1 (accessed on 19 October 2015).
- European Road Safety Observatory. Traffic Safety Basic Facts 2016. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/statistics/dacota/bfs2016_motomoped.pdf (accessed on 14 April 2019).
- Ursachen von Straßenverkehrsunfällen 2015-Fehlverhalten der Fahrzeugführer nach Art der Ver-kehrsbeteiligung und Unfallschwere-Tabelle 6.1-Statistisches Bundesamt (Destatis). 2017. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/_inhalt.html?__blob=publicationFile (accessed on 14 April 2019).
- ISTAT (2018). Incidenti Stradali-Anno 2017. Available online: https://www.istat.it/it/files//2018/07/Incidenti-stradali_2017.pdf (accessed on 14 April 2019).
- Blackman, R.A.; Haworth, N.L. Comparison of moped, scooter and motorcycle crash risk and crash severity. Accid. Anal. Prev. 2013, 57, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Horswill, M.S.; Helman, S. A behavioral comparison between motorcyclists and a matched group of non-motorcycling car drivers: Factors influencing accident risk. Accid. Anal. Prev. 2003, 35, 589–597. [Google Scholar] [CrossRef]
- Hancock, P.A.; Wulf, G.; Thom, D.; Fassnacht, P. Driver workload during differing driving maneuvers. Accid. Anal. Prev. 1990, 22, 281–290. [Google Scholar] [CrossRef]
- Wertheim, A.H. Visual conspicuity: A new simple standard, its reliability, validity and applicability. Ergonomics 2010, 53, 421–442. [Google Scholar] [CrossRef]
- Motorcycle Accident Cause Factors and Identification of Countermeasures. Volume 2: Appendix/Supplemental Data. Available online: https://rosap.ntl.bts.gov/view/dot/5652 (accessed on 14 April 2019).
- Jelalian, E.; Alday, S.; Spirito, A.; Rasile, D.; Nobile, C. Adolescent motor vehicle crashes: The relationship between behavioral factors and self-reported injury. J. Adolesc. Health 2000, 27, 84–93. [Google Scholar] [CrossRef]
- Chesham, D.J.; Rutter, D.R.; Quine, L. Motorcycling safety research: A review of the social and behavioural literature. Soc. Sci. Med. 1993, 37, 419–429. [Google Scholar] [CrossRef]
- Reeder, A.I.; Chalmers, D.J.; Langley, J.D. Rider training, reasons for riding, and the social context of riding among young on-road motorcyclists in New Zealand. Aust. N. Z. J. Public Health 1996, 20, 369–374. [Google Scholar] [CrossRef]
- Mullin, B.; Jackson, R.; Langley, J.; Norton, R. Increasing age and experience: Are both protective against motorcycle injury? A case-control study. Inj. Prev. 2000, 6, 32–35. [Google Scholar] [CrossRef]
- Lin, M.R.; Chang, S.H.; Pai, L.; Keyl, P.M. A longitudinal study of risk factors for motorcycle crashes among junior college students in Taiwan. Accid. Anal. Prev. 2003, 35, 243–252. [Google Scholar] [CrossRef]
- Liddle, J.; McKenna, K. Older drivers and driving cessation. Br. J. Occup. Ther. 2003, 66, 125–132. [Google Scholar] [CrossRef]
- Lourens, P.F.; Vissers, J.A.; Jessurun, M. Annual mileage, driving violations, and accident involvement in relation to drivers’ sex, age, and level of education. Accid. Anal. Prev. 1999, 31, 593–597. [Google Scholar] [CrossRef]
- Begg, D.J.; Langley, J.D.; Williams, S.M. A longitudinal study of lifestyle factors as predictors of injuries and crashes among young adults. Accid. Anal. Prev. 1999, 31, 1–11. [Google Scholar] [CrossRef]
- Lin, M.R.; Huang, W.; Hwang, H.F.; Wu, H.D.I.; Yen, L.L. The effect of crash experience on changes in risk taking among urban and rural young people. Accid. Anal. Prev. 2004, 36, 213–222. [Google Scholar] [CrossRef]
- Motorcycle Safety: A Scoping Study. Prepared for Road Safety Division, Department for Transport. Available online: http://motorcycleminds.org/virtuallibrary/ridersafety/TRL581.pdf (accessed on 14 April 2019).
- Langley, J.; Mullin, B.; Jackson, R.; Norton, R. Motorcycle engine size and risk of moderate to fatal injury from a motorcycle crash. Accid. Anal. Prev. 2000, 32, 659–663. [Google Scholar] [CrossRef]
- Teoh, E.R.; Campbell, M. Role of motorcycle type in fatal motorcycle crashes. J. Saf. Res. 2010, 41, 507–512. [Google Scholar] [CrossRef]
- Motorcyclist’s use of their front brakes. Available online: https://trl.co.uk/sites/default/files/RR020.pdf (accessed on 14 April 2019).
- Ecker, H.; Wassermann, J.; Hauer, G.; Ruspekhofer, R.; Grill, M. Braking deceleration of motorcycle riders. In Proceedings of the International Motorcycle Safety Conference, Orlando, FL, USA, 1–4 March 2001. [Google Scholar]
- History of Automotive Lighting in Europe 800339. Available online: https://www.sae.org/publications/technical-papers/content/800339/ (accessed on 14 April 2019).
- Cabani, I.; Toulminet, G.; Bensrhair, A. Color-based detection of vehicle lights. In Proceedings of the Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005. [Google Scholar]
- Kemeny, A.; Panerai, F. Evaluating perception in driving simulation experiments. Trends Cogn Sci 2003, 7, 31–37. [Google Scholar] [CrossRef]
- Wördenweber, B.; Boyce, P.; Hoffman, D.D.; Wallaschek, J. Automotive Lighting and Human Vision; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Boyce, P.R. Lighting for Driving: Roads, Vehicles, Signs, and Signals; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Luoma, J.; Flannagan, M.J.; Sivak, M.; Aoki, M.; Traube, E.C. Effects of turn-signal colour on reaction times to brake signals. Ergonomics 1997, 40, 62–68. [Google Scholar] [CrossRef]
- Sivak, M.; Flannagan, M.J.; Miyokawa, T.; Traube, E.C. Color identification in the visual periphery: Consequences for color coding of vehicle signals. Transp. Hum. Factors 2000, 2, 135–150. [Google Scholar] [CrossRef]
- Luoma, J.; Sivak, M.; Flannagan, M.J. Effects of dedicated stop-lamps on nighttime rear-end collisions. Leukos 2006, 3, 159–165. [Google Scholar]
- Taylor, G.W.; Ng, W.K. Measurement of Effectiveness of Rear-Turn-Signal Systems Accidents from an Analysis of Actual Accident Data. In Proceedings of the SAE Meeting International Congress and Exposition, Detroit, MI, USA, 23–27 February 1981. SAE Technical Paper. [Google Scholar] [CrossRef]
- Braitman, K.A.; Kirley, B.B.; Ferguson, S.; Chaudhary, N.K. Factors leading to older drivers’ intersection crashes. Traffic Inj. Prev. 2007, 8, 267–274. [Google Scholar] [CrossRef]
- Hosking, S.G.; Liu, C.C.; Bayly, M. The visual search patterns and hazard responses of experienced and inexperienced motorcycle riders. Accid. Anal. Prev. 2010, 42, 196–202. [Google Scholar] [CrossRef]
- Shahar, A.; Poulter, D.; Clarke, D.; Crundall, D. Motorcyclists’ and car drivers’ responses to hazards. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 243–254. [Google Scholar] [CrossRef]
- Milton, J.; Mannering, F. The relationship among highway geometric, traffic-related elements, and motor-vehicle accident frequencies. Transportation 1998, 25, 395–413. [Google Scholar] [CrossRef]
- Khorashadi, A.; Niemeier, D.; Shankar, V.; Mannering, F. Differences in rural and urban driver-injury severities in accidents involving large-trucks: An exploratory analysis. Accid. Anal. Prev. 2005, 37, 910–921. [Google Scholar] [CrossRef]
- Hours, M.; Bernard, M.; Charnay, P.; Chossegros, L.; Javouhey, E.; Fort, E.; Boisson, D.; Sancho, P.; Laumon, B. Functional outcome after road-crash injury: Description of the ESPARR victims cohort and 6-month follow-up results. Accid. Anal. Prev. 2010, 42, 412–421. [Google Scholar] [CrossRef]
- Robertson, R.; Vanlaar, W. Elderly drivers: Future challenges? Accid. Anal. Prev. 2008, 40, 1982–1986. [Google Scholar] [CrossRef]
- Kononen, D.W.; Flannagan, C.A.C.; Wang, S.C. Identification and validation of a logistic regression model for predicting serious injuries associated with motor vehicle crashes. Accid. Anal. Prev. 2011, 43, 112–122. [Google Scholar] [CrossRef]
- Cox, D.R. Analysis of binary data. Available online: https://www.taylorfrancis.com/books/9781351466738 (accessed on 14 April 2019).
- Abdel-Aty, M.A.; Radwan, A.E. Modeling traffic accident occurrence and involvement. Accid. Anal. Prev. 2000, 32, 633–642. [Google Scholar] [CrossRef]
- Chang, H.L.; Yeh, T.H. Motorcyclist accident involvement by age, gender, and risky behaviors in Taipei, Taiwan. Transp. Res. Part. F Traffic Psychol. Behav. 2007, 10, 109–122. [Google Scholar] [CrossRef]
- Owsley, C.; Ball, K.; McGwin, G., Jr.; Sloane, M.E.; Roenker, D.L.; White, M.F.; Overley, E.T. Visual processing impairment and risk of motor vehicle crash among older adults. Jama 1998, 279, 1083–1088. [Google Scholar] [CrossRef]
- Underwood, G.; Crundall, D.; Chapman, P. Driving simulator validation with hazard perception. Transp. Res. Part Traffic Psychol. Behav. 2011, 14, 435–446. [Google Scholar] [CrossRef]
- Liu, C.C.; Hosking, S.G.; Lenné, M.G. Hazard perception abilities of experienced and novice motorcyclists: An interactive simulator experiment. Transp. Res. Part Traffic Psychol. Behav. 2009, 12, 325–334. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description of Variable | Values | Count (*) (Proportion) |
|---|---|---|---|
| SIG | Correct detection | 0 = no | 164 (60%) |
| 1 = yes | 108 (40%) | ||
| CYC | Bicycle Driver | 0 = no | 70 (51%) |
| 1 = yes | 66 (49%) | ||
| CAR | Car Driver | 0 = no | 44 (32%) |
| 1 = yes | 92 (68%) | ||
| GEN | Gender | 0 = male | 58 (43%) |
| 1 = female | 78 (57%) | ||
| AGE | Age | 0 = if ≥ 50 | 35 (26%) |
| 1 = if < 50 | 101 (74%) | ||
| OCCL | Occluding Car | 0 = no | 136 (50%) |
| 1 = yes | 136 (50%) | ||
| URB | Urban | 0 = no | 136 (50%) |
| 1 = yes | 136 (50%) |
| Variable | Coefficient | Std. Err. | Wald Statistic | p-Value |
|---|---|---|---|---|
| Intercept | −3.320 | 0.906 | 13.4 | <0.001 * |
| CYC | −1.049 | 0.449 | 5.46 | 0.019 * |
| CAR | 1.203 | 0.569 | 4.46 | 0.034 * |
| GEN | 0.091 | 0.455 | 0.039 | 0.841 |
| AGE | 2.171 | 0.630 | 11.86 | <0.001 * |
| OCCL | 0.747 | 0.368 | 4.13 | 0.042 * |
| URB | 0.209 | 0.386 | 0.294 | 0.587 |
| Variable | Coefficient | Odds Ratio | Effect |
|---|---|---|---|
| CYC | −1.049 | 0.35 | Negative |
| CAR | 1.203 | 3.33 | Positive |
| AGE (<50) | 2.171 | 8.77 | Positive |
| OCCL | 0.747 | 2.11 | Positive |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micucci, A.; Mantecchini, L.; Sangermano, M. Analysis of the Relationship between Turning Signal Detection and Motorcycle Driver’s Characteristics on Urban Roads; A Case Study. Sensors 2019, 19, 1802. https://doi.org/10.3390/s19081802
Micucci A, Mantecchini L, Sangermano M. Analysis of the Relationship between Turning Signal Detection and Motorcycle Driver’s Characteristics on Urban Roads; A Case Study. Sensors. 2019; 19(8):1802. https://doi.org/10.3390/s19081802
Chicago/Turabian StyleMicucci, Alfonso, Luca Mantecchini, and Maurizio Sangermano. 2019. "Analysis of the Relationship between Turning Signal Detection and Motorcycle Driver’s Characteristics on Urban Roads; A Case Study" Sensors 19, no. 8: 1802. https://doi.org/10.3390/s19081802
APA StyleMicucci, A., Mantecchini, L., & Sangermano, M. (2019). Analysis of the Relationship between Turning Signal Detection and Motorcycle Driver’s Characteristics on Urban Roads; A Case Study. Sensors, 19(8), 1802. https://doi.org/10.3390/s19081802