Deterministic 3D Ray-Launching Millimeter Wave Channel Characterization for Vehicular Communications in Urban Environments †

 ,
,  ,
,  ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
- Full volumetric deterministic scenario simulation capabilities, which enable the analysis and evaluation of wireless system radio planning tasks, considering multi-link, multi-node configurations of any type.
- Estimation of frequency/power as well as time domain statistics for any given distribution of scatterers, considering frequency dispersive properties of all the elements within the scenario. This enables the analysis of multiple vehicular communication link types as a function of scenario as well as traffic conditions.
- Optimized simulation technique based on the use of hybrid simulation approach, based on the combination of 3D-RL with multiple acceleration techniques, in order to effectively consider large scenarios with topological detail levels.
2. Related Work
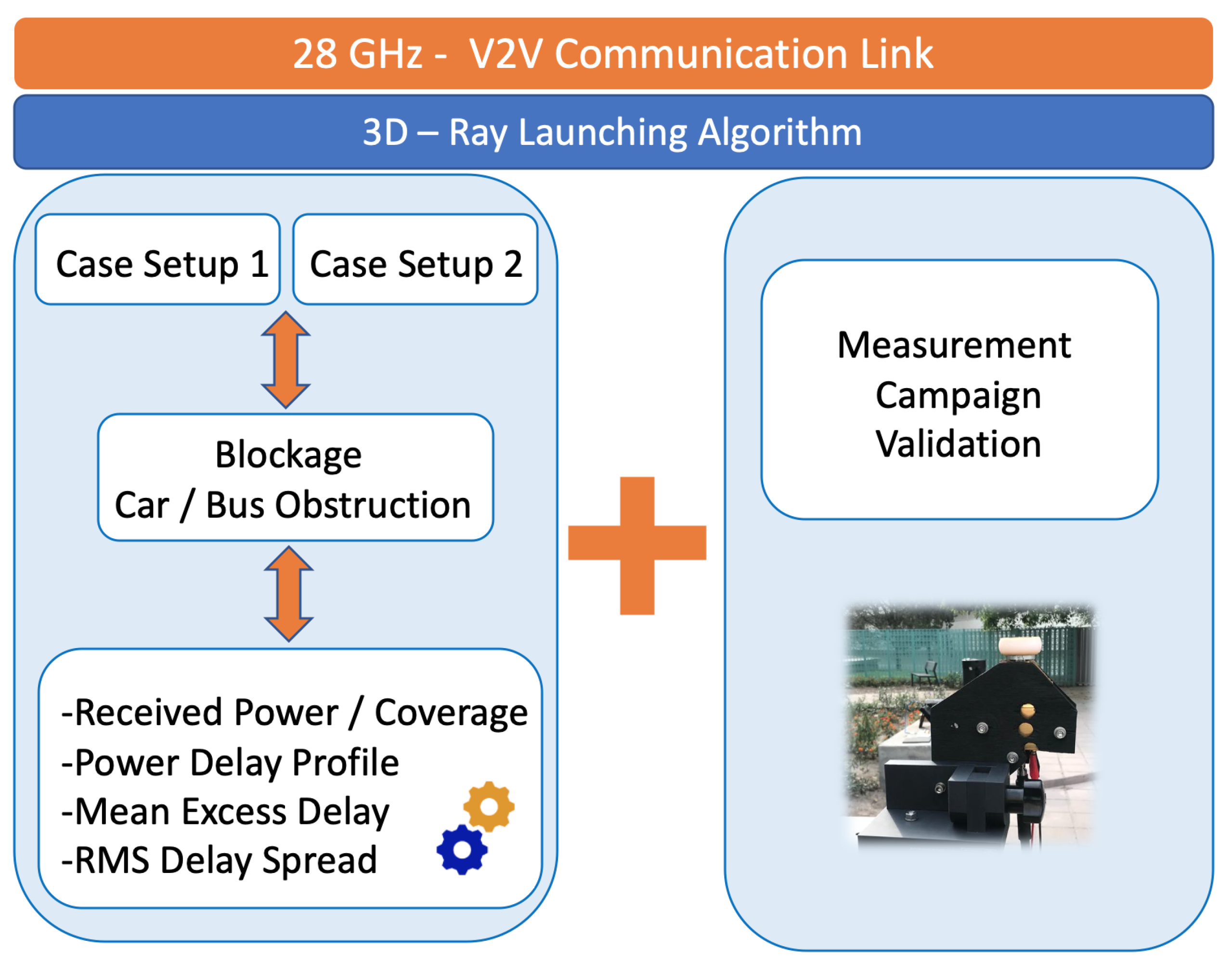
3. Materials and Methods
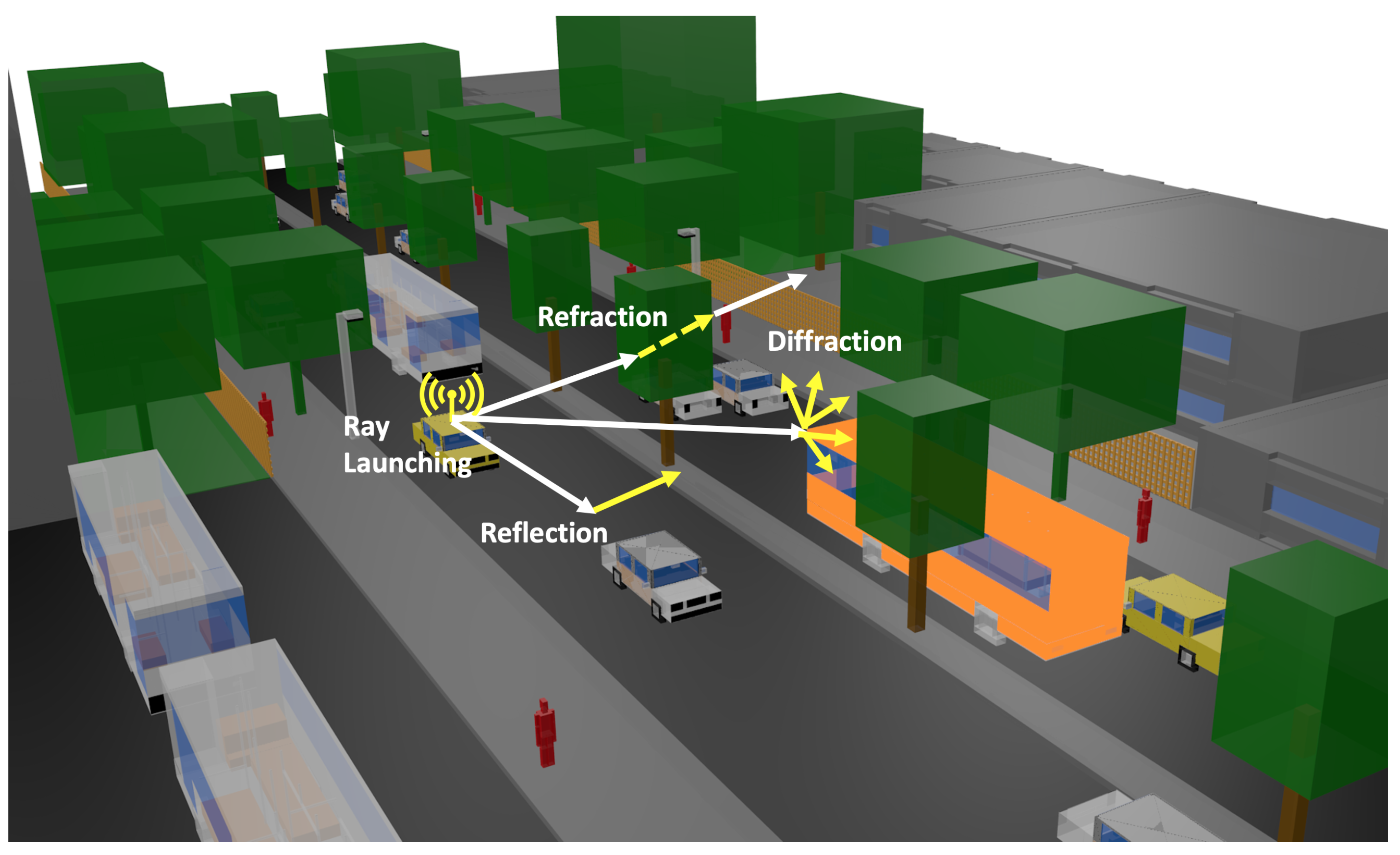
3.1. Ray-Launching Simulation Technique
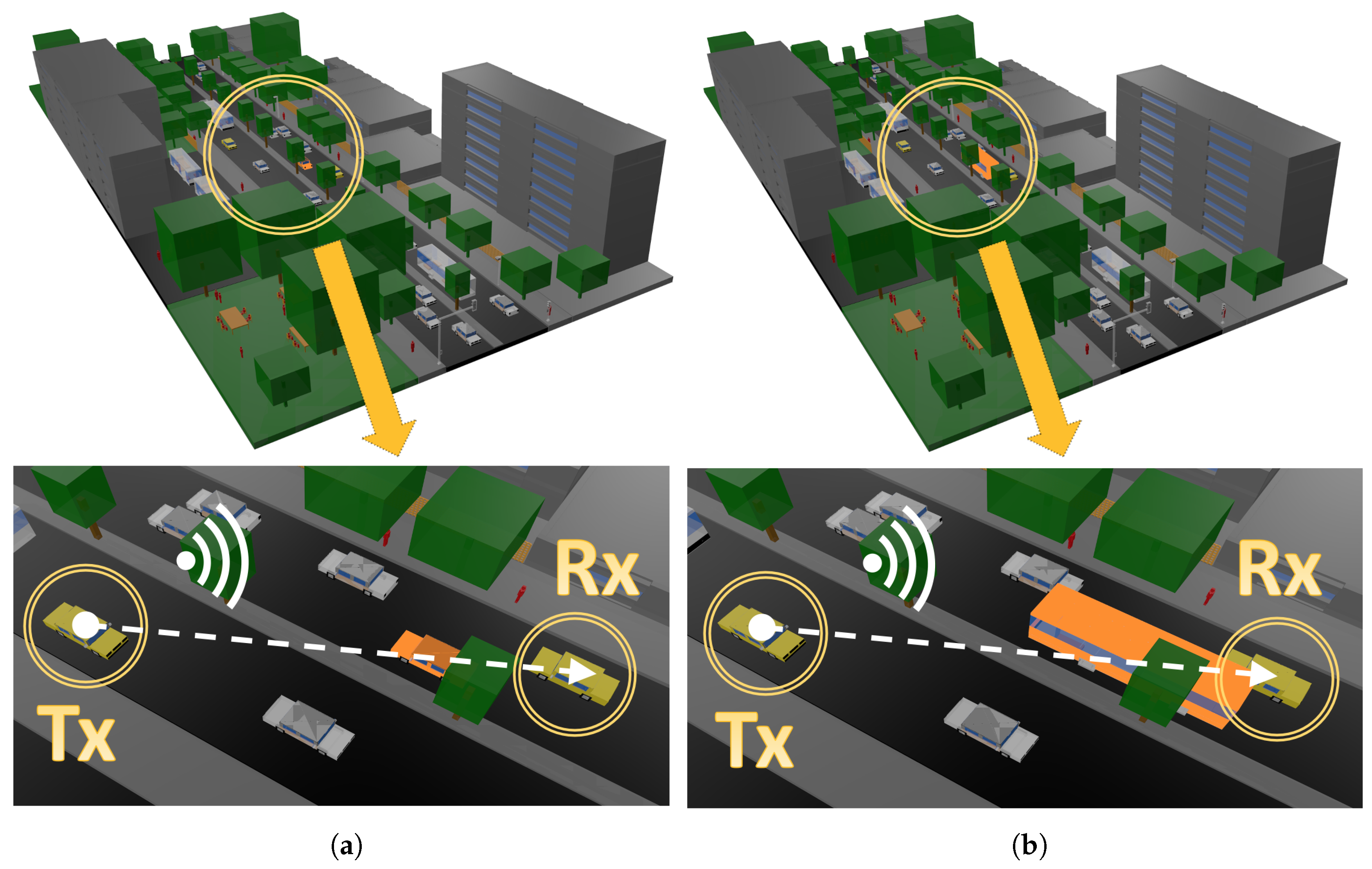
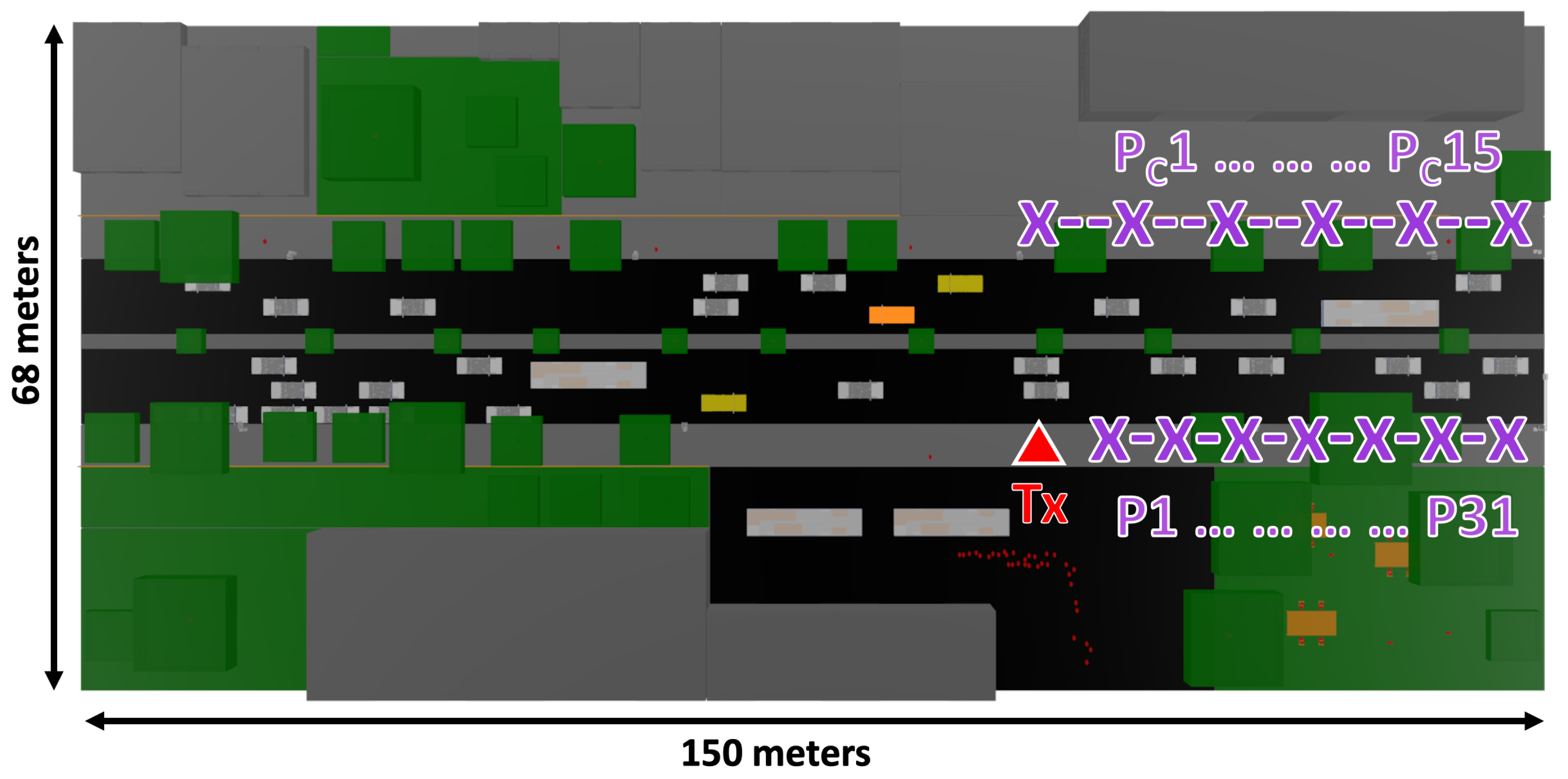
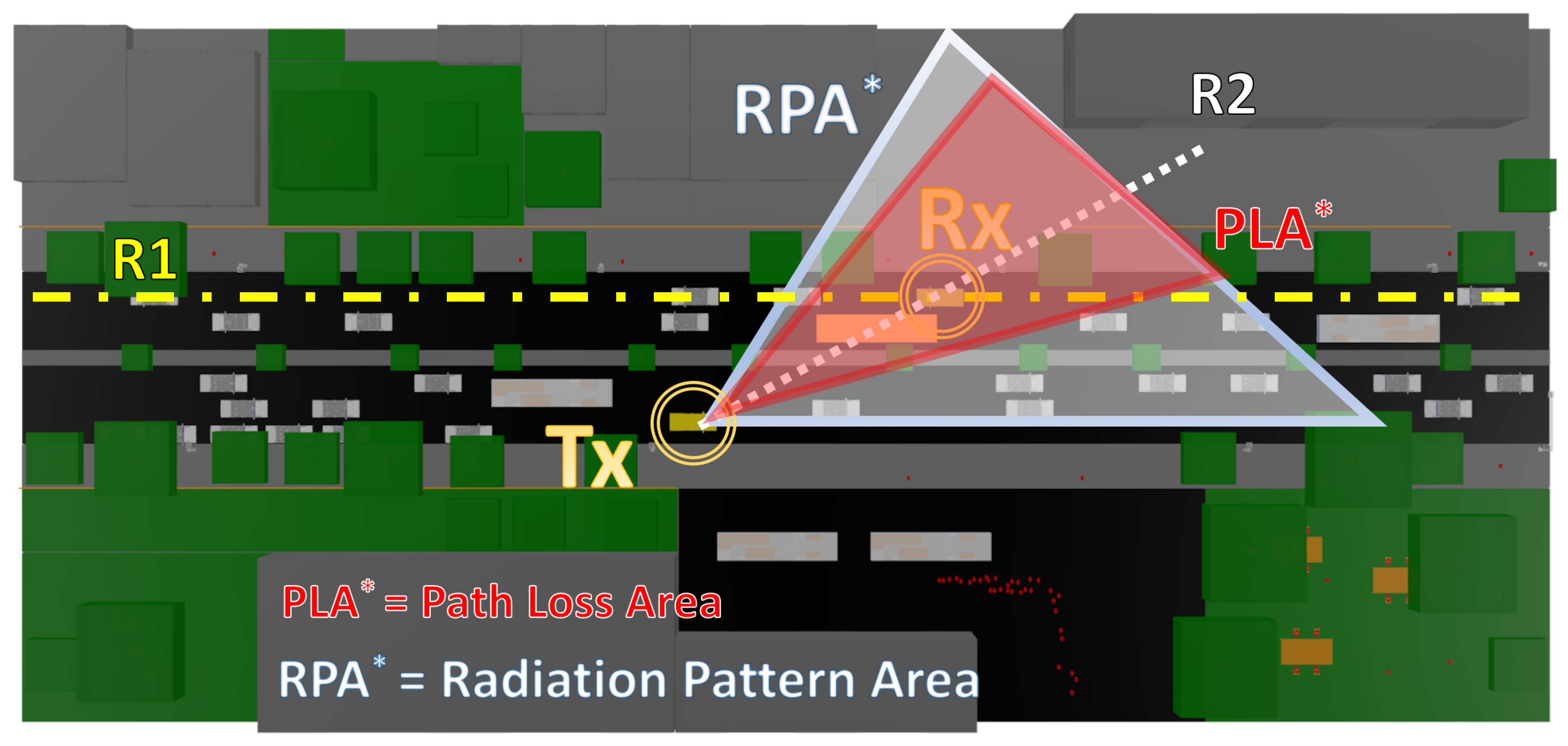
3.2. Scenario Description
3.3. Campaigns of Measurements
4. Simulation Results
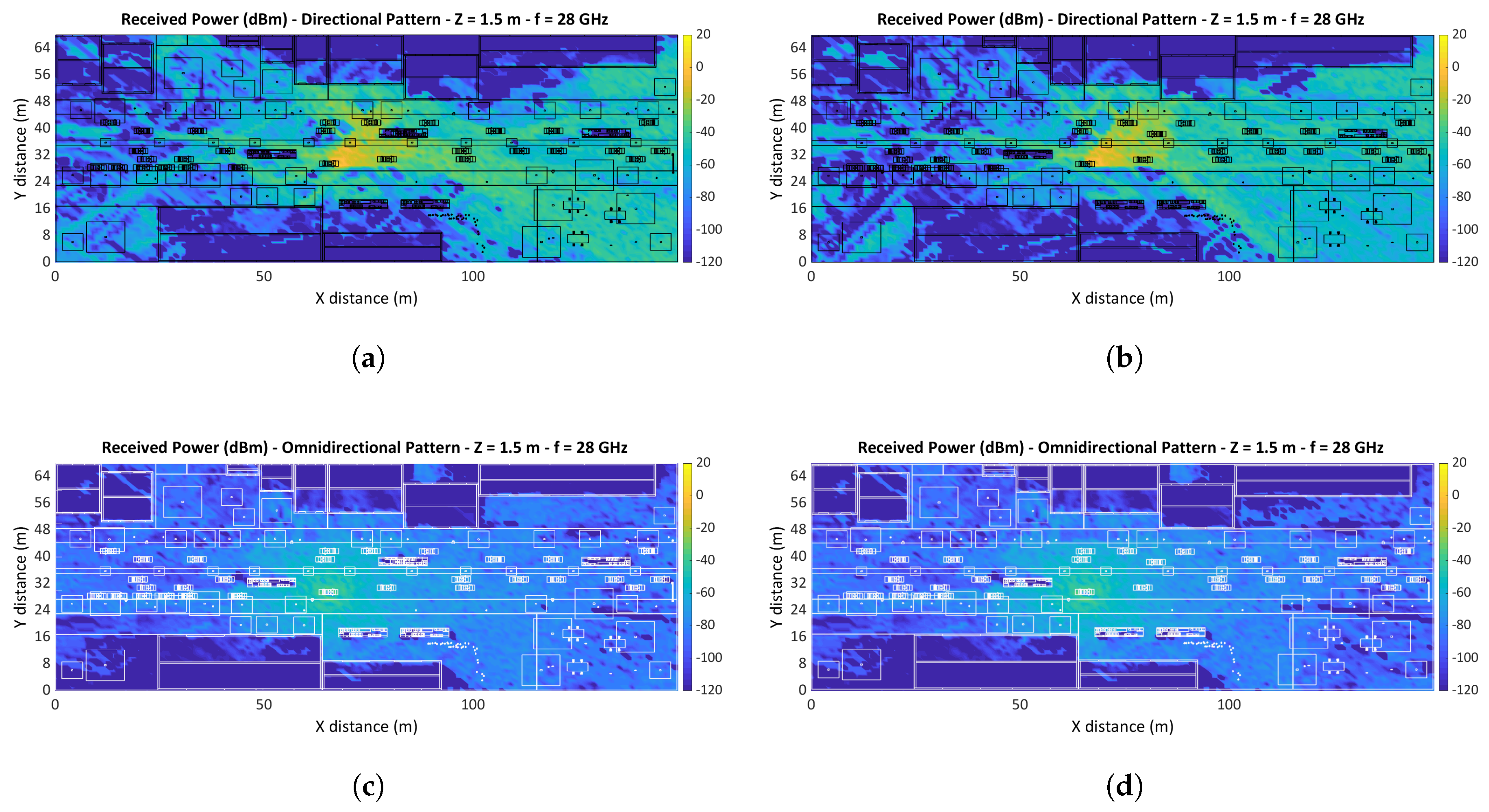
4.1. Received Power
4.2. Power Delay Profile (PDP)
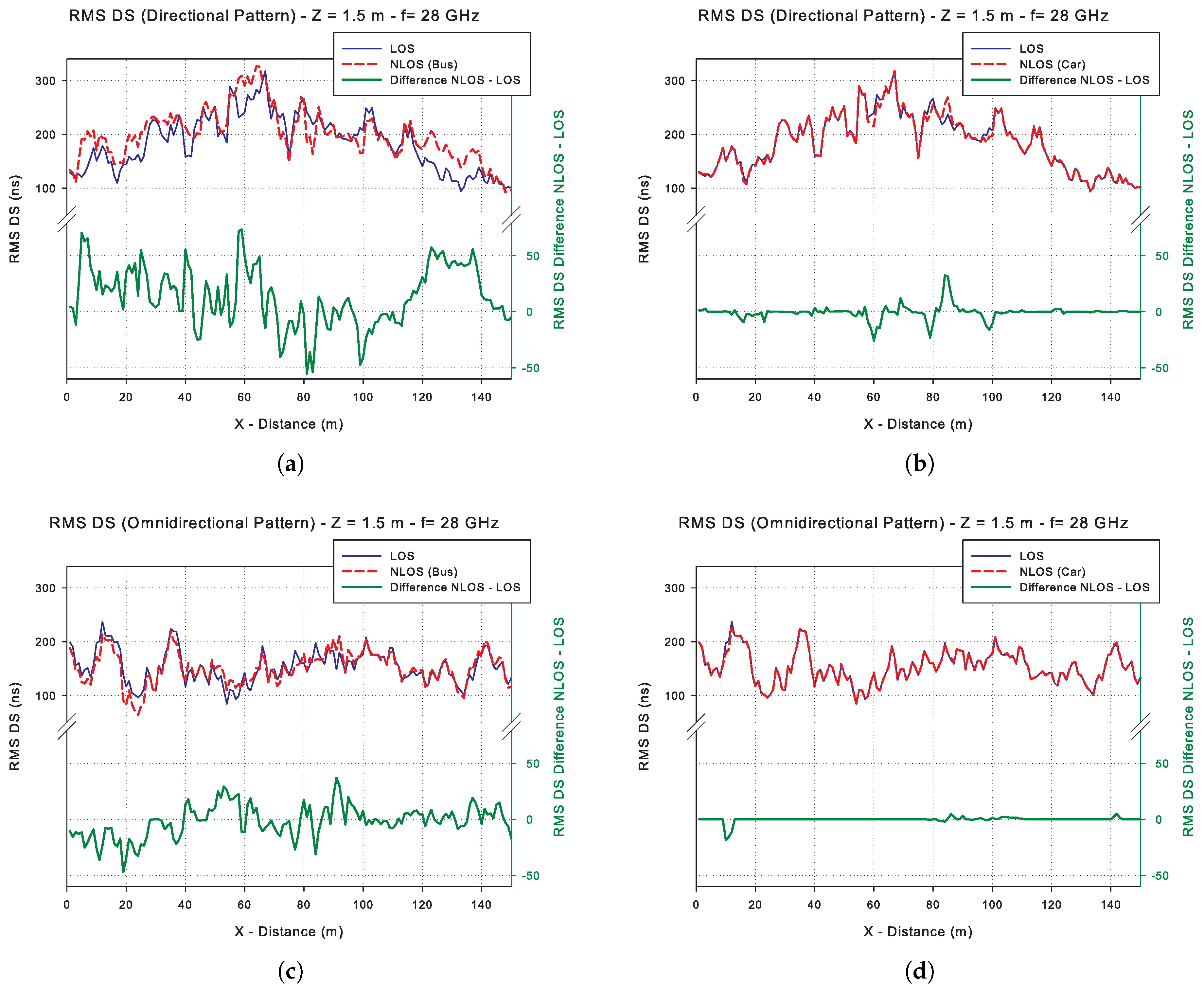
4.3. RMS Delay Spread (RMS DS)
5. Measurements Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Routray, S.K.; Sarangi, S.K.; Javali, A. Smart Cities: The Hopes and Hypes. Available online: https://arxiv.org/abs/1907.05702 (accessed on 2 September 2019).
- Djahel, S.; Doolan, R.; Muntean, G.M.; Murphy, J. A Communications-Oriented Perspective on Traffic Management Systems for Smart Cities: Challenges and Innovative Approaches. IEEE Commun. Surv. Tutor. 2015, 17, 125–151. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety 2018: Summary; Technical Report; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Kumar, R.; Baul, S. Global Sensor Market. Opportunity Analysis and Industry Forecast, 2018–2025; Technical Report; Allied Market Research: Portland, OR, USA, 2019. [Google Scholar]
- Nilsson, M.G.; Gustafson, C.; Abbas, T.; Tufvesson, F. A path loss and shadowing model for multilink vehicle-to-vehicle channels in urban intersections. Sensors 2018, 18, 4433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Netscribes Inc. Global Advanced Driver Assistance Systems(ADAS) Market (2018– 2023); Technical Report; Netscribes Inc.: New York, NY, USA, 2018. [Google Scholar]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Sybis, M. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Choi, J.; Va, V.; González-Prelcic, N.; Daniels, R.; Bhat, C.R.; Heath, R.W. Millimeter-Wave Vehicular Communication to Support Massive Automotive Sensing. IEEE Commun. Mag. 2016, 54, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Liang, L.; Peng, H.; Li, G.Y.; Shen, X. Vehicular communications: A physical layer perspective. IEEE Trans. Veh. Technol. 2017, 66, 10647–10659. [Google Scholar] [CrossRef]
- Martin-Vega, F.J.; Aguayo-Torres, M.C.; Gomez, G.; Entrambasaguas, J.T.; Duong, T.Q. Key technologies, modeling approaches, and challenges for millimeter-wave vehicular communications. IEEE Commun. Mag. 2018, 56, 28–35. [Google Scholar] [CrossRef]
- Machardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X access technologies: Regulation, research, and remaining challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Tassi, A.; Egan, M.; Piechocki, R.J.; Nix, A. Modeling and Design of Millimeter-Wave Networks for Highway Vehicular Communication. IEEE Trans. Veh. Technol. 2017, 66, 10676–10691. [Google Scholar] [CrossRef] [Green Version]
- Jameel, F.; Wyne, S.; Nawaz, S.J.; Chang, Z. Propagation channels for mmWave vehicular communications: State-of-the-art and future research directions. IEEE Wirel. Commun. 2019, 26, 144–150. [Google Scholar] [CrossRef] [Green Version]
- Shafi, M.; Zhang, J.; Tataria, H.; Molisch, A.F.; Sun, S.; Rappaport, T.S.; Tufvesson, F.; Wu, S.; Kitao, K. Microwave vs. Millimeter-Wave Propagation Channels: Key Differences and Impact on 5G Cellular Systems. IEEE Commun. Mag. 2018, 56, 14–20. [Google Scholar] [CrossRef]
- Restrepo, J. Spectrum Allocation for 5G International Framework; Technical Report; ITU—5G Workshop Agenda and Presentations, International Telecommunications Union (ITU): Lomé, Togo, 2019. [Google Scholar]
- C/LM-LAN/MAN Standards Committee. 802.11ad–Specific Requirements-Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 3: Enhancements for Very High Throughput in the 60 GHz Band. IEEE Std 802.11. 2012. Available online: standards.ieee.org/standard/802_11ad-2012.html (accessed on 15 December 2019).
- Perahia, E.; Cordeiro, C.; Park, M.; Yang, L.L. IEEE 802.11ad: Defining the next generation multi-Gbps Wi-Fi. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010. [Google Scholar] [CrossRef]
- Urushihara, T.; Takahashi, H.; Kobayashi, M.; Motozuka, H.; Irie, M.; Shirakata, N.; Takinami, K. 60 GHz wireless technologies for WiGig/IEEE 802.11ad multi-gigabit systems. In Proceedings of the 2014 Asia-Pacific Microwave Conference, Sendai, Japan, 4–7 November 2014; pp. 628–630. [Google Scholar]
- Ghasempour, Y.; Da Silva, C.R.; Cordeiro, C.; Knightly, E.W. IEEE 802.11ay: Next-Generation 60 GHz Communication for 100 Gb/s Wi-Fi. IEEE Commun. Mag. 2017, 55, 186–192. [Google Scholar] [CrossRef]
- Avot, T. 5G on the Highway to V2X; Technical Report; Altran: Paris, France, 2019. [Google Scholar]
- Flore, D. The Automotive Use-Case for 5G; Technical Report; Automotive Association: Barcelona, Spain, 2017. [Google Scholar]
- 5G Spectrum: GSMA Public Policy Position. 2019. Available online: https://www.gsma.com/spectrum/wp-content/uploads/2020/03/5G-Spectrum-Positions.pdf (accessed on 28 June 2020).
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A survey of vehicle to everything (V2X) testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, J.; Liu, Y.; Wang, C.X.; Sun, J.; Xiao, H. 5G Millimeter wave channel sounders, measurements, and models: Recent developments and future challenges. IEEE Commun. Mag. 2019, 57, 138–145. [Google Scholar] [CrossRef]
- Iskander, M.F.; Yun, Z. Propagation prediction models for wireless communication systems. IEEE Trans. Microw. Theory Tech. 2002, 50, 662–673. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Tomás, A.; Hernández-Orallo, E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Empirical Study and Modeling of Vehicular Communications at Intersections in the 5 GHz Band. Mob. Inf. Syst. 2017. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, I.; Almeida, E.P.; Lauridsen, M.; Wassie, D.A.; Gimenez, L.C.; Nguyen, H.C.; Sørensen, T.B.; Mogensen, P. Measurement-based evaluation of the impact of large vehicle shadowing on V2X communications. In Proceedings of the European Wireless Conference 2016, Oulu, Finland, 18–20 May 2016; pp. 142–149. [Google Scholar]
- Li, Y.; Ai, B.; Michelson, D.G.; Lin, S.; Wang, Q.; Zhong, Z. A Method for Generating Correlated Taps in Stochastic Vehicle-To-Vehicle Channel Models; Institute of Electrical and Electronics Engineers Inc.: Glasgow, UK, 2015; Volume 2015. [Google Scholar] [CrossRef]
- Acosta-Marum, G.; Ingram, M.A. Six time-and frequency-selective empirical channel models for vehicular wireless LANs. In Proceedings of the IEEE Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007; pp. 2134–2138. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Stuber, G.L.; Wang, G.; Zhong, Z. Geometrical-Based Modeling for Millimeter-Wave MIMO Mobile-to-Mobile Channels. IEEE Trans. Veh. Technol. 2018, 67, 2848–2863. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, C.X.; He, Y.; Alwakeel, M.M.; Aggoune, E.H.M. 3D Wideband Non-Stationary Geometry-Based Stochastic Models for Non-Isotropic MIMO Vehicle-to-Vehicle Channels. IEEE Trans. Wirel. Commun. 2015, 14, 6883–6895. [Google Scholar] [CrossRef]
- Zhu, Q.; Yang, Y.; Chen, X.; Tan, Y.; Fu, Y.; Wang, C.X.; Li, W. A novel 3d non-stationary vehicle-to-vehicle channel model and its spatial-temporal correlation properties. IEEE Access 2018, 6, 43633–43643. [Google Scholar] [CrossRef]
- Rodríguez-Corbo, F.; Azpilicueta, L.; Celaya-Echarri, M.; López-Iturri, P.; Picallo, I.; Falcone, F.; Alejos, A. Millimeter Wave Spatial Channel Characterization for Vehicular Communications. Proceedings 2019, 42, 64. [Google Scholar] [CrossRef] [Green Version]
- Kato, A.; Sato, K.; Fujise, M.; Kawakami, S. Propagation characteristics of 60-GHz millimeter waves for ITS inter-vehicle communications. IEICE Trans. Commun. 2001, 84, 2530–2539. [Google Scholar]
- Yun, Z.; Iskander, M.F. Ray tracing for radio propagation modeling: Principles and applications. IEEE Access 2015, 3, 1089–1100. [Google Scholar] [CrossRef]
- Zhou, A.; Huang, J.; Sun, J.; Zhu, Q.; Wang, C.X.; Yang, Y. 60 GHz Channel Measurements and Ray Tracing Modeling in an Indoor Environment; Institute of Electrical and Electronics Engineers Inc.: Nanjing, China, 2017; Volume 2017, pp. 1–6. [Google Scholar] [CrossRef]
- Lee, J.H.; Choi, J.; Lee, J.Y.; Kim, S.C. 28 GHz Millimeter-Wave Channel Models in Urban Microcell Environment Using Three-Dimensional Ray Tracing. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 426–429. [Google Scholar] [CrossRef]
- Sun, X.; Liu, Y.; Li, S. Study on 60 GHz Millimeter Wave Propagation Characteristics Inside a Bus Based on SBR/IM Method; Institute of Electrical and Electronics Engineers Inc.: Chengdu, China, 2018. [Google Scholar] [CrossRef]
- Larew, S.G.; Thomas, T.A.; Cudak, M.; Ghosh, A. Air interface design and ray tracing study for 5G millimeter wave communications. In Proceedings of the 2013 IEEE Globecom Workshops, Atlanta, GA, USA, 9–13 December 2013; pp. 117–122. [Google Scholar] [CrossRef]
- Antonescu, B.; Moayyed, M.T.; Basagni, S. mmWave channel propagation modeling for V2X communication systems. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- He, D.; Ai, B.; Guan, K.; Zhong, Z.; Hui, B.; Kim, J.; Chung, H.; Kim, I. Channel measurement, simulation, and analysis for high-speed railway communications in 5g millimeter-wave band. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3144–3158. [Google Scholar] [CrossRef]
- He, D.; Ai, B.; Schmieder, M.; Zhong, Z.; Kim, J.; Hui, B.; Chung, H.; Kim, I.; Hao, Y. Influence Analysis of Typical Objects in Rural Railway Environments at 28 GHz. IEEE Trans. Veh. Technol. 2019, 68, 2066–2076. [Google Scholar] [CrossRef]
- Yan, D.; Guan, K.; He, D.; Ai, B.; Li, Z.; Kim, J.; Chung, H.; Zhong, Z. Channel Characterization for Vehicle-to-Infrastructure Communications in Millimeter-Wave Band. IEEE Access 2020, 8, 42325–42341. [Google Scholar] [CrossRef]
- Wang, L.; Ai, B.; He, D.; Guan, K.; Zhang, J.; Kim, J.; Zhong, Z. Vehicle-to-infrastructure channel characterization in urban environment at 28 GHz. China Commun. 2019, 16, 36–48. [Google Scholar] [CrossRef]
- Petrov, V.; Kokkoniemi, J.; Moltchanov, D.; Lehtomaki, J.; Juntti, M.; Koucheryavy, Y. The Impact of Interference from the Side Lanes on mmWave/THz Band V2V Communication Systems with Directional Antennas. IEEE Trans. Veh. Technol. 2018, 67, 5028–5041. [Google Scholar] [CrossRef]
- Zhou, P.; Fang, X.; Wang, X.; Long, Y.; He, R.; Han, X. Deep learning-based beam management and interference coordination in dense mmWave networks. IEEE Trans. Veh. Technol. 2019, 68, 592–603. [Google Scholar] [CrossRef]
- Wang, Y.; Venugopal, K.; Molisch, A.F.; Heath, R.W. MmWave Vehicle-to-Infrastructure Communication: Analysis of Urban Microcellular Networks. IEEE Trans. Veh. Technol. 2018, 67, 7086–7100. [Google Scholar] [CrossRef] [Green Version]
- Hashemi, M.; Koksal, C.E.; Shroff, N.B. Hybrid RF-mmWave communications to achieve low latency and high energy efficiency in 5G cellular systems. In 2017 15th International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks(WiOpt); Institute of Electrical and Electronics Engineers Inc.: Paris, France, 2017. [Google Scholar] [CrossRef]
- Navarro, A.; Guevara, D.; Gomez, J. A Proposal to Improve Ray Launching Techniques. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 143–146. [Google Scholar] [CrossRef]
- Guan, K.; Ai, B.; He, D.; Matolak, D.W.; Wang, Q.; Zhong, Z.; Kurner, T. Obstructed vehicle-to-vehicle channel modeling for intelligent vehicular communications. In Proceedings of the 2018 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Anaheim, CA, USA, 26–29 November 2018. [Google Scholar]
- Wang, C.X.; Bian, J.; Sun, J.; Zhang, W.; Zhang, M. A survey of 5g channel measurements and models. IEEE Commun. Surv. Tutorials 2018, 20, 3142–3168. [Google Scholar] [CrossRef]
- He, R.; Zhang, Y.; Ai, B.; Wang, G.; Zhong, Z.; Schneider, C.; Dupleich, D.A.; Thomae, R.S.; Boban, M.; Luo, J. Propagation Channels of 5G Millimeter-Wave Vehicle-to-Vehicle Communications: Recent Advances and Future Challenges. IEEE Veh. Technol. Mag. 2020, 15, 16–26. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Celaya-Echarri, M.; Lopez-Iturri, P.; Vargas-Rosales, C.; Falcone, F. Spatial V2X Traffic Density Channel Characterization for Urban Environments. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Martínez, C.; Astrain, J.J.; Villadangos, J.; Falcone, F. Evaluation of deployment challenges of wireless sensor networks at signalized intersections. Sensors 2016, 16, 1140. [Google Scholar] [CrossRef] [Green Version]
- Azpilicueta, L.; Aguirre, E.; López-Iturri, P.; Falcone, F. An accurate UTD extension to a ray-launching algorithm for the analysis of complex indoor radio environments. J. Electromagn. Waves Appl. 2016, 30, 43–60. [Google Scholar] [CrossRef]
- Iturri, P.L.; Nazábal, J.A.; Azpilicueta, L.; Rodriguez, P.; Beruete, M.; Fernández-Valdivielso, C.; Falcone, F. Impact of high power interference sources in planning and deployment of Wireless Sensor Networks and devices in the 2.4 GHz frequency band in heterogeneous environments. Sensors 2012, 12, 15689–15708. [Google Scholar] [CrossRef]
- Celaya-Echarri, M.; Azpilicueta, L.; Lopez-Iturri, P.; Aguirre, E.; De Miguel-Bilbao, S.; Ramos, V.; Falcone, F. Spatial characterization of personal rf-emf exposure in public transportation buses. IEEE Access 2019, 7, 33038–33054. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.; Falcone, F. Convergence analysis in deterministic 3D ray launching radio channel estimation in complex environments. Appl. Comput. Electromagn. Soc. J. 2014, 29, 256–271. [Google Scholar]
- Salous, S. Radio Propagation Measurement and Channel Modelling; John Wiley and Sons: Chichester, UK, 2013; pp. 1–399. [Google Scholar] [CrossRef]
- Loredo, S.; Rodríguez-Alonso, A.; Torres, R.P. Indoor MIMO channel modeling by rigorous GO/UTD-based ray tracing. IEEE Trans. Veh. Technol. 2008, 57, 680–692. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.M.; Falcone, F. A ray launching-neural network approach for radio wave propagation analysis in complex indoor environments. IEEE Trans. Antennas Propag. 2014, 62, 2777–2786. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Falcone, F.; Janaswamy, R. A Hybrid Ray Launching-Diffusion Equation Approach for Propagation Prediction in Complex Indoor Environments. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 214–217. [Google Scholar] [CrossRef]
- Casino, F.; Azpilicueta, L.; Lopez-Iturri, P.; Aguirre, E.; Falcone, F.; Solanas, A. Optimized Wireless Channel Characterization in Large Complex Environments by Hybrid Ray Launching-Collaborative Filtering Approach. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 780–783. [Google Scholar] [CrossRef]
- ITU. Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz. Available online: https://www.itu.int/rec/R-REC-P.2040-1-201507-I/en (accessed on 20 June 2020).
- Celaya-Echarri, M.; Azpilicueta, L.; Lopez-Iturri, P.; Falcone, F.; Garcia Sanchez, M.; Vazquez Alejos, A. Validation of 3D simulation tool for radio channel modeling at 60 GHz: A meeting point for empirical and simulation-based models. Measurement 2020, 163, 108038. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Heath, R.W.; Daniels, R.C.; Murdock, J.N. Millimeter Wave Wireless Communications; Prentice Hall: New York, NY, USA, 2015. [Google Scholar]
- Rappaport, T.S.; Sun, S.; Mayzus, R.; Zhao, H.; Azar, Y.; Wang, K.; Wong, G.N.; Schulz, J.K.; Samimi, M.; Gutierrez, F. Millimeter wave mobile communications for 5G cellular: It will work! IEEE Access 2013, 1, 335–349. [Google Scholar] [CrossRef]
- Niu, Y.; Li, Y.; Jin, D.; Su, L.; Vasilakos, A.V. A survey of millimeter wave communications (mmWave) for 5G: Opportunities and challenges. Wirel. Netw. 2015, 21, 2657–2676. [Google Scholar] [CrossRef]
- Rappaport, T.S.; MacCartney, G.R.; Samimi, M.K.; Sun, S. Wideband millimeter-wave propagation measurements and channel models for future wireless communication system design. IEEE Trans. Commun. 2015, 63, 3029–3056. [Google Scholar] [CrossRef]
- Sun, S.; MacCartney, G.R.; Rappaport, T.S. Millimeter-wave distance-dependent large-scale propagation measurements and path loss models for outdoor and indoor 5G systems. In Proceedings of the 2016 10th European Conference on Antennas and Propagation, Davos, Switzerland, 10–15 April 2016. [Google Scholar] [CrossRef] [Green Version]
- Boban, M.; Dupleich, D.; Iqbal, N.; Luo, J.; Schneider, C.; Muller, R.; Yu, Z.; Steer, D.; Jamsa, T.; Li, J.; et al. Multi-band vehicle-to-vehicle channel characterization in the presence of vehicle blockage. IEEE Access 2019, 7, 9724–9735. [Google Scholar] [CrossRef]
- Hur, S.; Baek, S.; Kim, B.; Chang, Y.; Molisch, A.F.; Rappaport, T.S.; Haneda, K.; Park, J. Proposal on millimeter-wave channel modeling for 5G cellular system. IEEE J. Sel. Top. Signal Process. 2016, 10, 454–469. [Google Scholar] [CrossRef]
- Molisch, A.F. Wireless Communications; John Wiley & Sons: Chichester, UK, 2012; pp. 113–114. [Google Scholar]
- Vlastaras, D.; Abbas, T.; Nilsson, M.; Whiton, R.; Olback, M.; Tufvesson, F. Impact of a truck as an obstacle on vehicle-to-vehicle communications in rural and highway scenarios. In Proceedings of the 2014 IEEE 6th International Symposium on Wireless Vehicular Communications, Vancouver, BC, Canada, 14–15 September 2014. [Google Scholar] [CrossRef] [Green Version]
- He, R.; Molisch, A.F.; Tufvesson, F.; Zhong, Z.; Ai, B.; Zhang, T. Vehicle-to-vehicle propagation models with large vehicle obstructions. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2237–2248. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| REF | Type | Environment | Channel Metrics | Frequency | Year |
|---|---|---|---|---|---|
| [36] | - | Indoor | PDP, PAS | 60 GHz | 2017 |
| [37] | Cellular | Urban Microcell | PL exponent | 28 GHz | 2018 |
| [38] | - | Inside a Bus | RMS DS, PL | 60 GHz | 2018 |
| [39] | Cellular | Urban | PL exponent, RMS DS | 72 GHz | 2013 |
| [40] | V2I | Urban | PL, RMS DS | 28 GHz | 2018 |
| [41] | HST | Several | PL, RMS DS, PDP, CT | 25.25 GHz | 2018 |
| [42] | HST | Rural railway | PL, RMS DS | 28 GHz | 2019 |
| [43] | V2I | Urban/Highway | KF, RMS DS, AS | 60 and 21.6 GHz | 2020 |
| [44] | V2I | Urban | PDP, KF, RMS DS, AS | 28 GHz | 2019 |
| Setup Case 1 | Setup Case 2 | |
|---|---|---|
| Frequency | 28 GHz | |
| TX Power | 10 dBm | |
| TX Antenna type/Power Amplifier/Gain | Monopole/0 dBi/0 dBi | Steerable 60°/20 dBi/0 dBi |
| RX Antenna type/Low Noise Amplifier/Gain | Monopole/20 dBi/0 dBi | Steerable 60°/20 dBi/0 dBi |
| 3D-RL Angle Resolution (/) | 1° | 0.25° |
| Number of reflections | 6 | |
| Scenario size/Unitary volume analysis | 150 m × 68 m × 22 m/1 m × 1 m × 1 m | |
| Omnidirectional Pattern | Directional Pattern | |||
|---|---|---|---|---|
| Car Obstruction | Bus Obstruction | Car Obstruction | Bus Obstruction | |
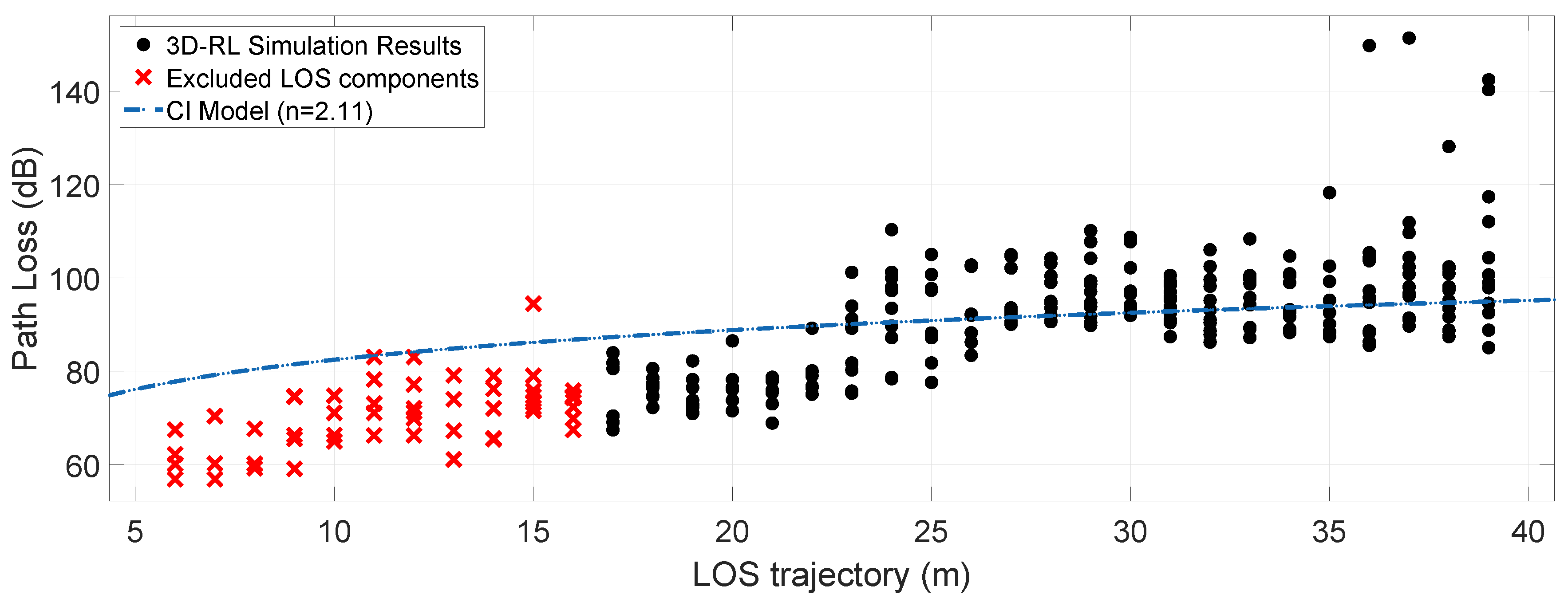
| - | - | 2.11 | 2.84 | |
| (Path Loss) | - | - | 11.09 dB | 15.69 dB |
| Mean Excess Delay | 245.7 ns | 227.8 ns | 294.6 ns | 221.5 ns |
| RMS DS difference (NLOS-LOS ) | 3.24 ns | 21.14 ns | 2.16 ns | 3.74 ns |
| (RMS DS) | 2.35 ns | 14.25 ns | 6.23 ns | 26.44 ns |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Corbo, F.A.; Azpilicueta, L.; Celaya-Echarri, M.; Lopez-Iturri, P.; Picallo, I.; Falcone, F.; Alejos, A.V. Deterministic 3D Ray-Launching Millimeter Wave Channel Characterization for Vehicular Communications in Urban Environments. Sensors 2020, 20, 5284. https://doi.org/10.3390/s20185284
Rodríguez-Corbo FA, Azpilicueta L, Celaya-Echarri M, Lopez-Iturri P, Picallo I, Falcone F, Alejos AV. Deterministic 3D Ray-Launching Millimeter Wave Channel Characterization for Vehicular Communications in Urban Environments. Sensors. 2020; 20(18):5284. https://doi.org/10.3390/s20185284
Chicago/Turabian StyleRodríguez-Corbo, Fidel Alejandro, Leyre Azpilicueta, Mikel Celaya-Echarri, Peio Lopez-Iturri, Imanol Picallo, Francisco Falcone, and Ana Vazquez Alejos. 2020. "Deterministic 3D Ray-Launching Millimeter Wave Channel Characterization for Vehicular Communications in Urban Environments" Sensors 20, no. 18: 5284. https://doi.org/10.3390/s20185284