Breath-Jockey: Development and Feasibility Assessment of a Wearable System for Respiratory Rate and Kinematic Parameter Estimation for Gallop Athletes

 ,
,  , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Characterization and Development of the Wearable System
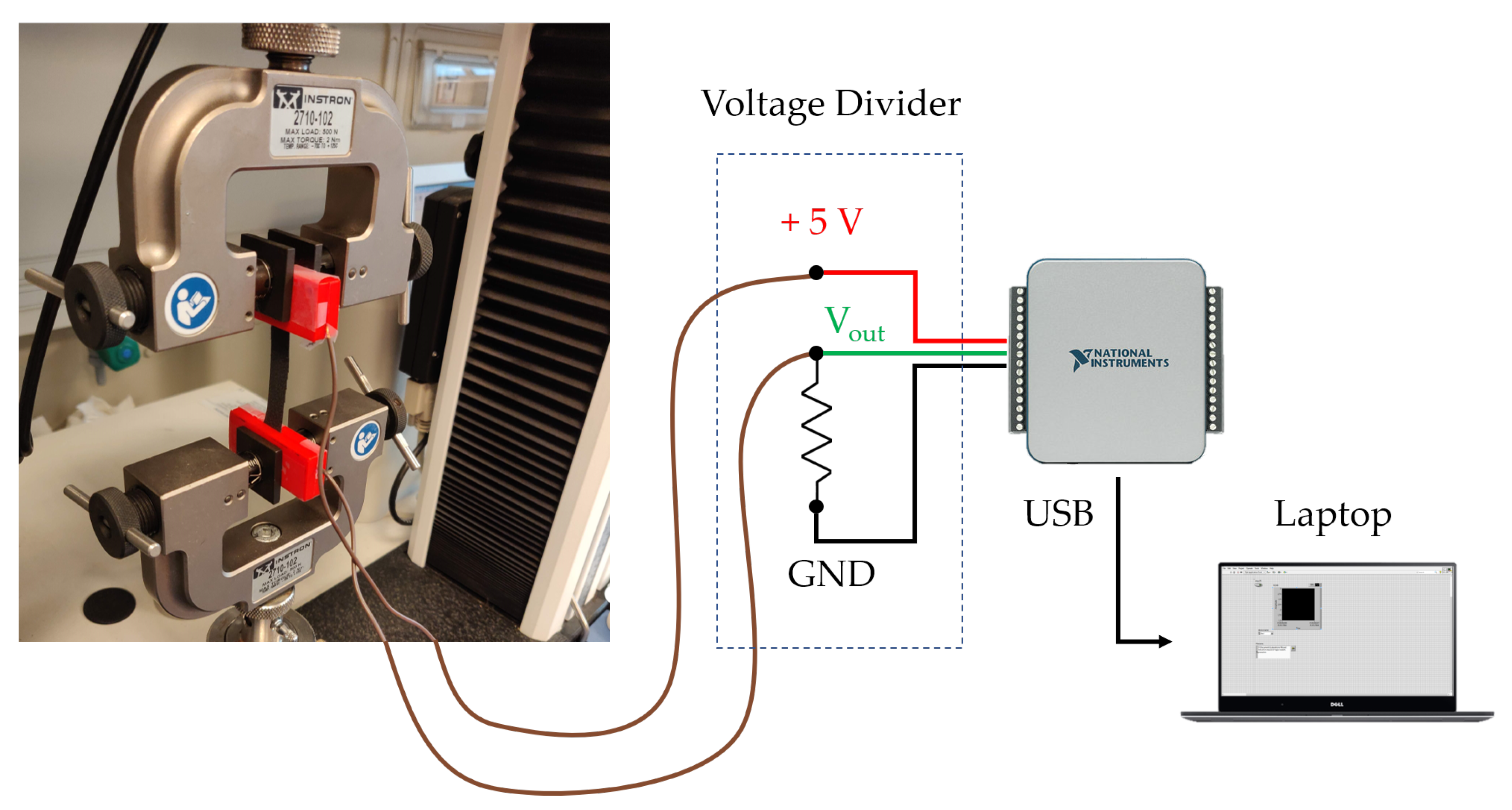
2.1. Metrological Characterization of Sensing Elements for Respiratory Rate Monitoring
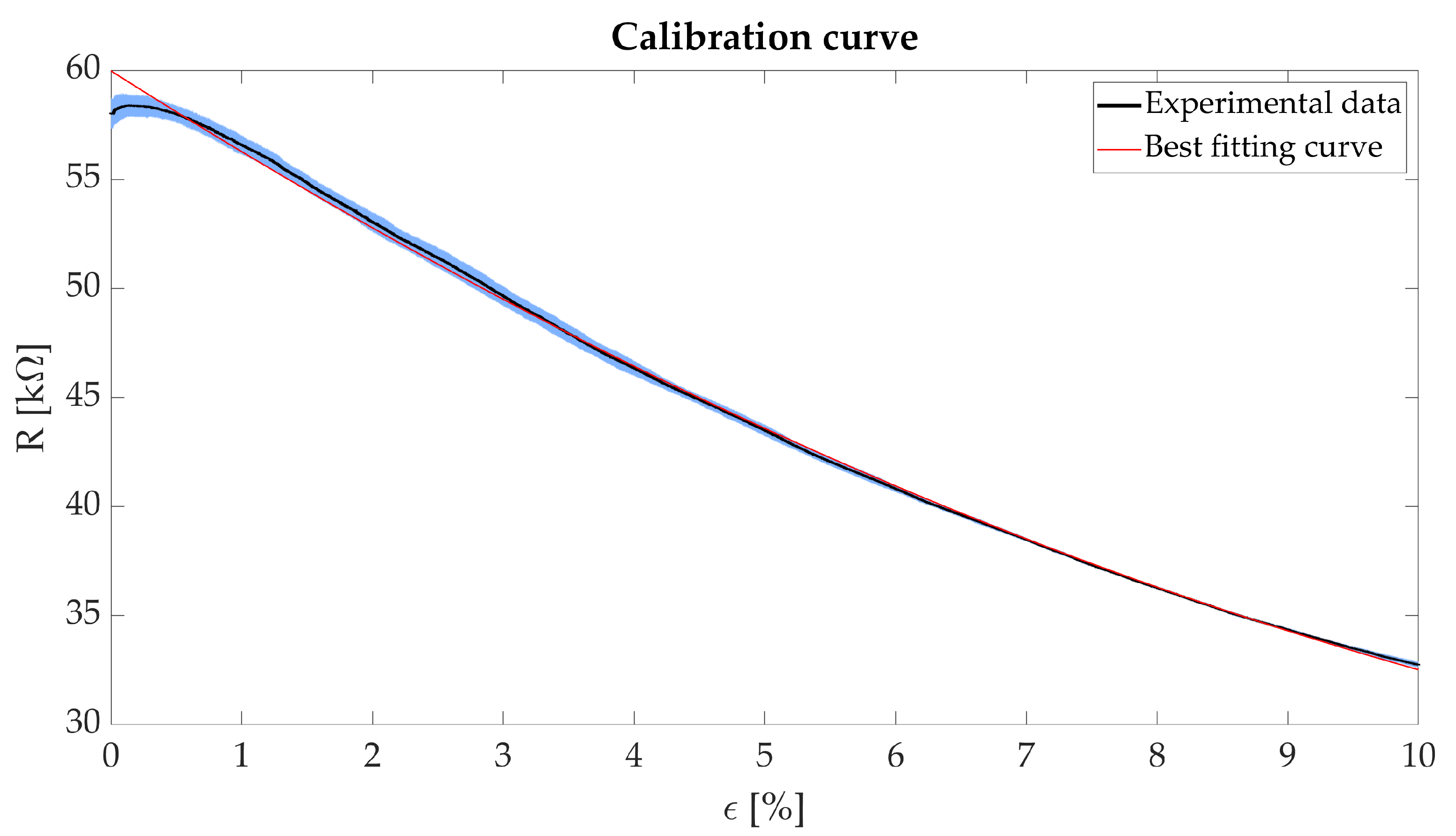
2.1.1. Static Analysis: Calibration Curve and Sensitivity Analysis
2.1.2. Hysteresis Analysis
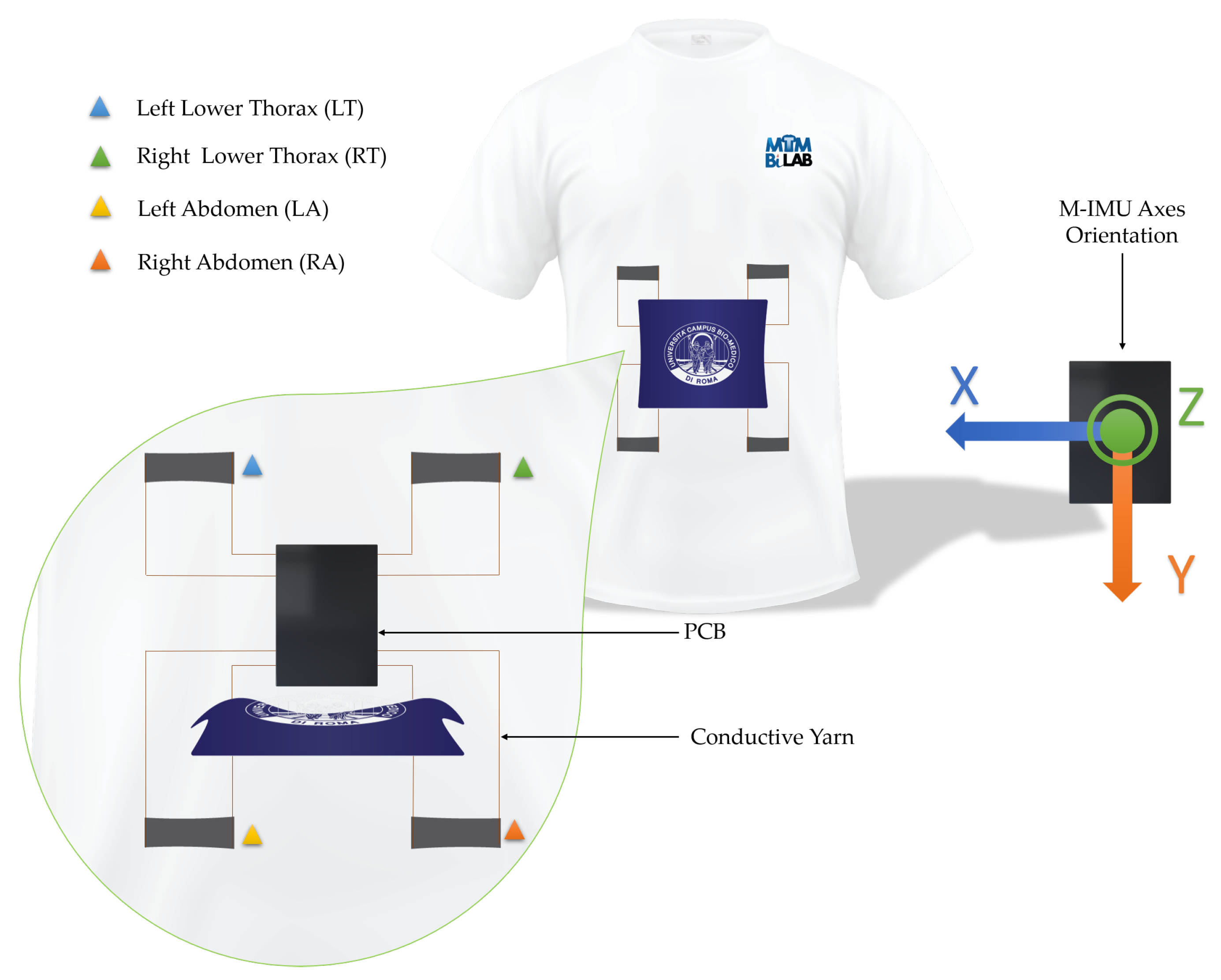
2.2. Sensing Unit for Monitoring Kinematic Parameters
2.3. Development of the Wearable System
3. Experimental Setup and Result
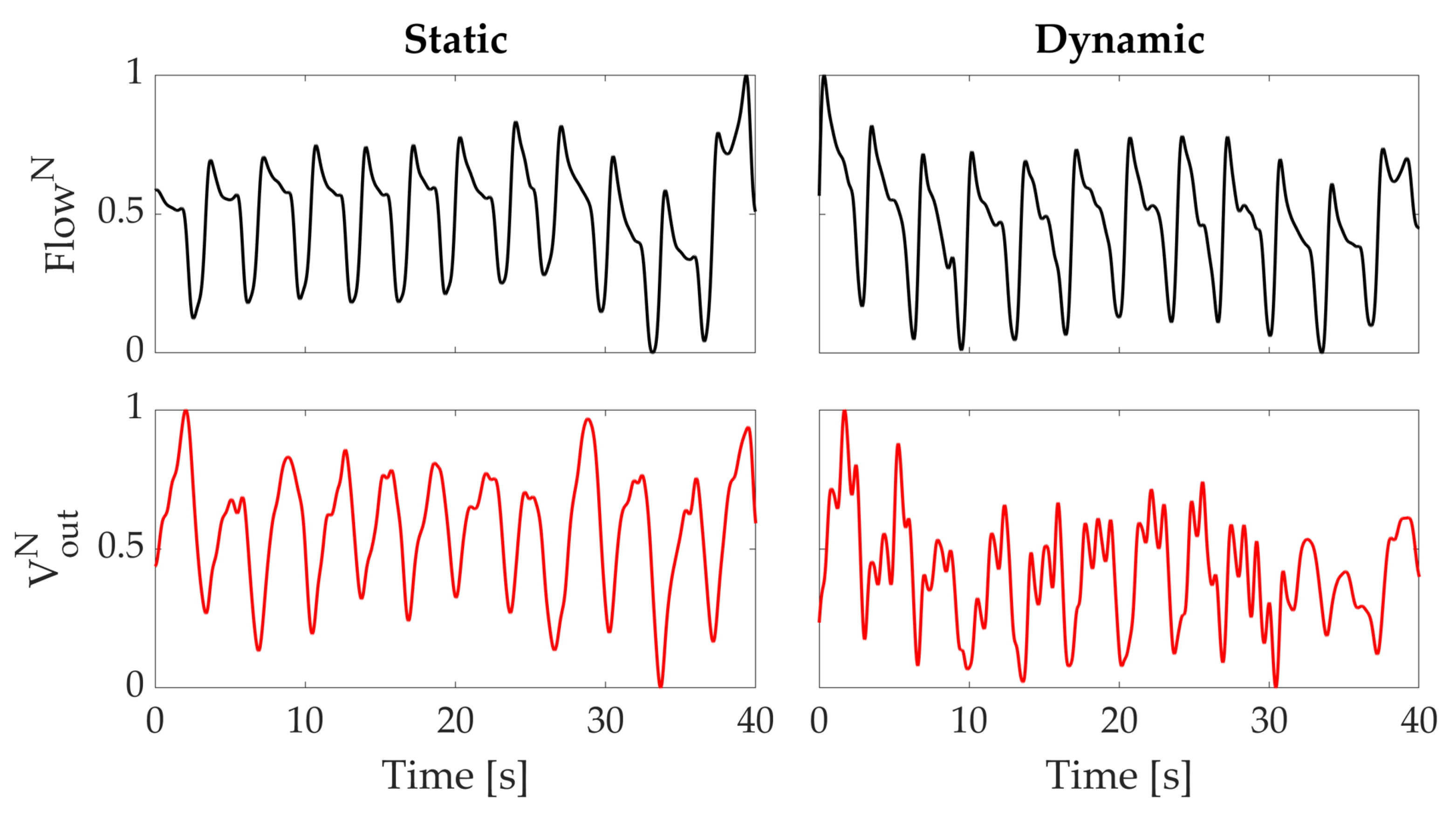
3.1. Test on a Healthy Volunteer
3.2. Pilot Study on Race Day
- 1.
- Pre-race phase (∼1000 s before the race start)
- 2.
- Race phase
- 3.
- Post-race phase (∼1000 s after the race end)
- (i)
- Race duration: time window calculated as the time difference between the end and the beginning of the race. The race duration for both jockeys was approximately 120 s.
- (ii)
- Acceleration: the proposed wearable system records along with the respiratory data also the three-axis inertial data allowing the evaluation of the acceleration which the jockey undergoes. We calculated such acceleration as in Equation (3) The maximum and average values of acceleration were ∼36.3 m·s and ∼9.8 m·s for jockey 1 and ∼47.1 m·s and ∼10.8 m·s for jockey 2, respectively.
- (iii)
- Number of strides: the number of horse strides has been calculated by summing the number of peaks in the jockey’s acceleration signal during the race phase, obtaining 293 strides for jockey 1 and 326 strides for jockey 2.
- (iv)
- Average horse stride length: we calculated the average horse stride length by dividing the total length of the race circuit (i.e., 2000 m for jockey 1 and 2400 m for jockey 2) by the number of strides calculated previously obtaining a stride length of 6.83 m and 7.36 m, respectively.
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RR | Respiratory Rate |
| M-IMU | Magneto Inertial Measurement Unit |
| HR | Heart Rate |
| PSD | Power Spectral Density |
| Oxygen uptake | |
| I2C | Inter-Integrated Circuit |
| PCB | Printed Circuit Board |
| ADC | Analog Digital Converter |
References
- Wilson, G.; Sparks, S.A.; Drust, B.; Morton, J.P.; Close, G.L. Assessment of energy expenditure in elite jockeys during simulated race riding and a working day: Implications for making weight. Appl. Physiol. Nutr. Metab. 2013, 38, 415–420. [Google Scholar] [CrossRef] [PubMed]
- Trowbridge, E.; Cotterill, J.; Crofts, C. The physical demands of riding in National Hunt races. Eur. J. Appl. Physiol. Occup. Physiol. 1995, 70, 66–69. [Google Scholar] [CrossRef]
- Waller, A.E.; Daniels, J.L.; Weaver, N.L.; Robinson, P. Jockey injuries in the United States. JAMA 2000, 283, 1326–1328. [Google Scholar] [CrossRef] [PubMed]
- Hitchens, P.; Blizzard, L.; Jones, G.; Day, L.; Fell, J. Predictors of race-day jockey falls in jumps racing in Australia. Accid. Anal. Prev. 2011, 43, 840–847. [Google Scholar] [CrossRef] [PubMed]
- Press, J.M.; Davis, P.D.; Wiesner, S.L.; Heinemann, A.; Semik, P.; Addison, R.G. The national jockey injury study: An analysis of injuries to professional horse-racing jockeys. Clin. J. Sport Med. Off. J. Can. Acad. Sport Med. 1995, 5, 236–240. [Google Scholar] [CrossRef]
- Stewart, G. Drugs, Performance and Responses to Exercise in the Racehorse: Observatiosns on Amphetamine, Promazine and Thiamine. Aust. Vet. J. 1972, 48, 544–547. [Google Scholar] [CrossRef]
- Sherman, J.; Mitchell, W.; Martin, S.; Thorsen, J.; Ingram, D. Control of equine respiratory disease on Ontario Standardbred racetracks. Can. Vet. J. 1977, 18, 154. [Google Scholar]
- Cullen, S.; O’Loughlin, G.; McGoldrick, A.; Smyth, B.; May, G.; Warrington, G.D. Physiological demands of flat horse racing jockeys. J. Strength Cond. Res. 2015, 29, 3060–3066. [Google Scholar] [CrossRef]
- Kiely, M.; Warrington, G.D.; McGoldrick, A.; Pugh, J.; Cullen, S. Physiological Demands of Professional Flat and Jump Horse Racing. J. Strength Cond. Res. 2020, 34, 2173–2177. [Google Scholar] [CrossRef]
- Kiely, M.; Warrington, G.; McGoldrick, A.; Cullen, S. Physiological and Performance Monitoring in Competitive Sporting Environments: A Review for Elite Individual Sports. Strength Cond. J. 2019, 41, 62–74. [Google Scholar] [CrossRef]
- Fonseca, R.; Kenny, D.; Hill, E.; Katz, L. The association of various speed indices to training responses in Thoroughbred flat racehorses measured with a global positioning and heart rate monitoring system. Equine Vet. J. 2010, 42, 51–57. [Google Scholar] [CrossRef] [PubMed]
- Pfau, T.; Spence, A.; Starke, S.; Ferrari, M.; Wilson, A. Modern riding style improves horse racing times. Science 2009, 325, 289. [Google Scholar] [CrossRef] [PubMed]
- Dias, D.; Paulo Silva Cunha, J. Wearable health devices—Vital sign monitoring, systems and technologies. Sensors 2018, 18, 2414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Massaroni, C.; Di Tocco, J.; Bravi, M.; Carnevale, A.; Lo Presti, D.; Sabbadini, R.; Miccinilli, S.; Sterzi, S.; Formica, D.; Schena, E. Respiratory Monitoring During Physical Activities With a Multi-Sensor Smart Garment and Related Algorithms. IEEE Sens. J. 2020, 20, 2173–2180. [Google Scholar] [CrossRef]
- Di Tocco, J.; Massaroni, C.; Raiano, L.; Formica, D.; Schena, E. A wearable system for respiratory and pace monitoring in running activities: A feasibility study. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 44–48. [Google Scholar]
- Massaroni, C.; Di Tocco, J.; Sabbadini, R.; Carnevale, A.; Lo Presti, D.; Schena, E.; Raiano, L.; Formica, D.; Miccinilli, S.; Bravi, M.; et al. Influence of torso movements on a multi-sensor garment for respiratory monitoring during walking and running activities. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Yamamoto, A.; Nakamoto, H.; Bessho, Y.; Watanabe, Y.; Oki, Y.; Ono, K.; Fujimoto, Y.; Terada, T.; Ishikawa, A. Monitoring respiratory rates with a wearable system using a stretchable strain sensor during moderate exercise. Med. Biol. Eng. Comput. 2019, 57, 2741–2756. [Google Scholar] [CrossRef]
- Lo Presti, D.; Romano, C.; Massaroni, C.; D’Abbraccio, J.; Massari, L.; Caponero, M.A.; Oddo, C.M.; Formica, D.; Schena, E. Cardio-respiratory monitoring in archery using a smart textile based on flexible fiber Bragg grating sensors. Sensors 2019, 19, 3581. [Google Scholar] [CrossRef] [Green Version]
- Nicolò, A.; Girardi, M.; Sacchetti, M. Control of the depth and rate of breathing: Metabolic vs. non-metabolic inputs. J. Physiol. 2017, 595, 6363. [Google Scholar] [CrossRef] [Green Version]
- Nicolò, A.; Girardi, M.; Bazzucchi, I.; Felici, F.; Sacchetti, M. Respiratory frequency and tidal volume during exercise: Differential control and unbalanced interdependence. Physiol. Rep. 2018, 6, e13908. [Google Scholar] [CrossRef] [Green Version]
- Tipton, M.J.; Harper, A.; Paton, J.F.; Costello, J.T. The human ventilatory response to stress: Rate or depth? J. Physiol. 2017, 595, 5729–5752. [Google Scholar] [CrossRef]
- Nicolò, A.; Massaroni, C.; Passfield, L. Respiratory frequency during exercise: The neglected physiological measure. Front. Physiol. 2017, 8, 922. [Google Scholar] [CrossRef]
- Cretikos, M.A.; Bellomo, R.; Hillman, K.; Chen, J.; Finfer, S.; Flabouris, A. Respiratory rate: The neglected vital sign. Med. J. Aust. 2008, 188, 657–659. [Google Scholar] [CrossRef] [PubMed]
- Massaroni, C.; Nicolò, A.; Sacchetti, M.; Schena, E. Contactless Methods For Measuring Respiratory Rate: A Review. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Bipm, I.; Ifcc, I.; Iupac, I. Oiml, Guide to the Expression of Uncertainty in Measurement; ISO: Geneva, Switzerland, 1995. [Google Scholar]
- Parkes, R. Rate of respiration: The forgotten vital sign. Emerg. Nurse 2011, 19. [Google Scholar] [CrossRef] [PubMed]
- Massaroni, C.; Di Tocco, J.; Lo Presti, D.; Longo, U.G.; Miccinilli, S.; Sterzi, S.; Formica, D.; Saccomandi, P.; Schena, E. Smart Textile Based on Piezoresistive Sensing Elements for Respiratory Monitoring. IEEE Sens. J. 2019, 19, 7718–7725. [Google Scholar] [CrossRef]
- Presti, D.L.; Massaroni, C.; Zaltieri, M.; Sabbadini, R.; Carnevale, A.; Di Tocco, J.; Longo, U.G.; Caponero, M.A.; D’Amato, R.; Schena, E.; et al. A Magnetic Resonance-compatible wearable device based on functionalized fiber optic sensor for respiratory monitoring. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jockey | Height [cm] | Weight [kg] | BMI [kg/m] | Sex | Age [y] |
|---|---|---|---|---|---|
| 1 | 160 | 50 | 19.5 | Male | 26 |
| 2 | 158 | 48 | 19.2 | Female | 26 |
| Jockey | Pre-Race [bpm] | Race [bpm] | Post-Race [bpm] |
|---|---|---|---|
| 1 | 24.0 | 38.5 | 29.7 |
| 2 | 30.1 | 52.3 | 17.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Tocco, J.; Sabbadini, R.; Raiano, L.; Fani, F.; Ripani, S.; Schena, E.; Formica, D.; Massaroni, C. Breath-Jockey: Development and Feasibility Assessment of a Wearable System for Respiratory Rate and Kinematic Parameter Estimation for Gallop Athletes. Sensors 2021, 21, 152. https://doi.org/10.3390/s21010152
Di Tocco J, Sabbadini R, Raiano L, Fani F, Ripani S, Schena E, Formica D, Massaroni C. Breath-Jockey: Development and Feasibility Assessment of a Wearable System for Respiratory Rate and Kinematic Parameter Estimation for Gallop Athletes. Sensors. 2021; 21(1):152. https://doi.org/10.3390/s21010152
Chicago/Turabian StyleDi Tocco, Joshua, Riccardo Sabbadini, Luigi Raiano, Federica Fani, Simone Ripani, Emiliano Schena, Domenico Formica, and Carlo Massaroni. 2021. "Breath-Jockey: Development and Feasibility Assessment of a Wearable System for Respiratory Rate and Kinematic Parameter Estimation for Gallop Athletes" Sensors 21, no. 1: 152. https://doi.org/10.3390/s21010152