
An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis

 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Literature Review
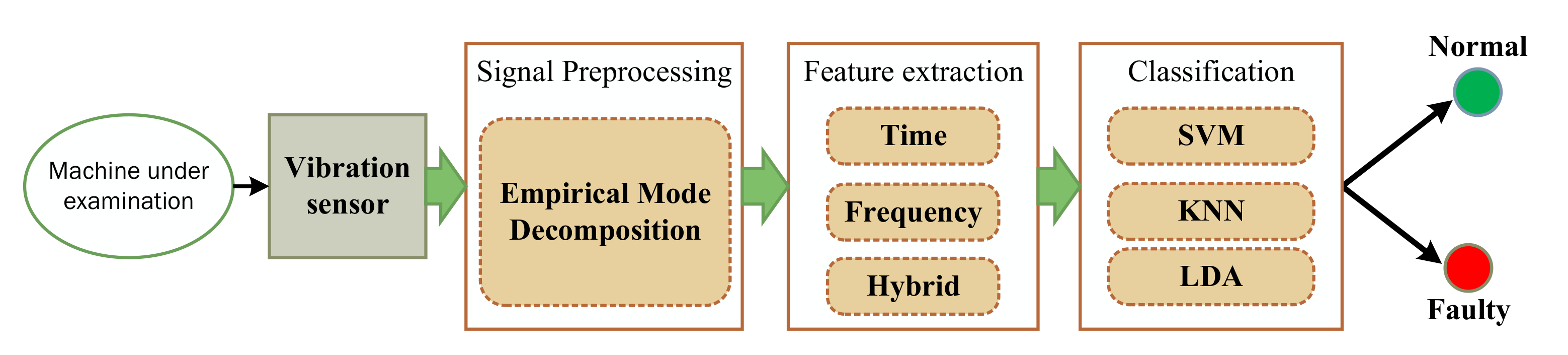
- First, a practical dataset of vibration signals is constructed from large industrial scale 45 KW three-phase induction motors coupled with centrifugal water pumps. To acquire signals in real time, an industry standard sensor, i.e., Beanscape tri-axis acceleromter is used.
- The proposed method employed a data-driven approach in signal preprocessing step using Empirical mode decomposition technique.
- While most of the published works are based on using only a single class of features, i.e., time, frequency or time-frequency features constructed from STFT, this work proposes to use multi-class feature vectors consisting of several combinations of time domain and frequency domain features. A detailed analysis is done to study the discriminative properties of a large pool of such combinations. The most promising feature combinations resulting in high classification performance are then presented.
- Classification is performed using various classifiers with multiple kernel settings.
3. Materials and Methods
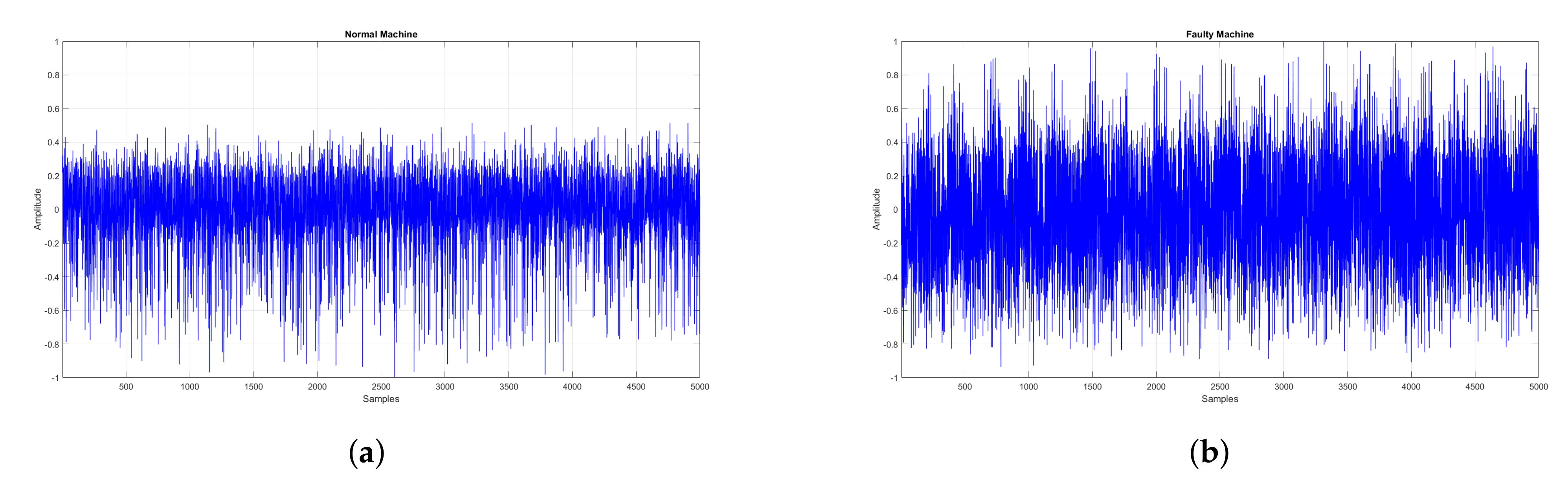
3.1. Data Acquisition
3.2. Preprocessing
Empirical Mode Decomposition
- The number of maxima and minima must differ atmost by 1
- The mean of IMF is zero
- Identify all local minima and maxima of the input signal
- Create the upper and lower envelope of all local minima and maxima by using cubic-spline method
- Designate the mean of upper and lower envelopes as
- Calculate as the first component
- If is an IMF, take it as first IMF of . Else, take is a proto-IMF and name it as . Take as the original signal and repeat steps 1–4 until is an IMF, and designate it as , where k indicates the number of iterations to produce an IMF.
- Obtain residum
- Treat as the original signal and apply steps 1–6 to obtain other IMFs as follows:The decomposition process can be stopped when becomes a monotonic function. However, only few IMFs have physical meaning for most practical purposes. At the end of EMD, it gives a signal of the formwhere is decomposed into n IMFs and a residue . Figure 4a,b illustrate few IMFs extracted from normal and faulty signals of machines. High frequency components can be observed in lower IMFs. In this work, total 10 IMFs are extracted. It was conceived experimentally that first IMF (IMF1) contained noisy elements and redundant components. Therefore, this component was rejected. The remaining nine IMFs and residual signal were added together to construct the preprocessed signal.
3.3. Feature Extraction
3.3.1. Temporal Features
3.3.2. Spectral Features
3.3.3. Hybrid Features
3.4. Classification
4. Performance Analysis
4.1. Feature Analysis
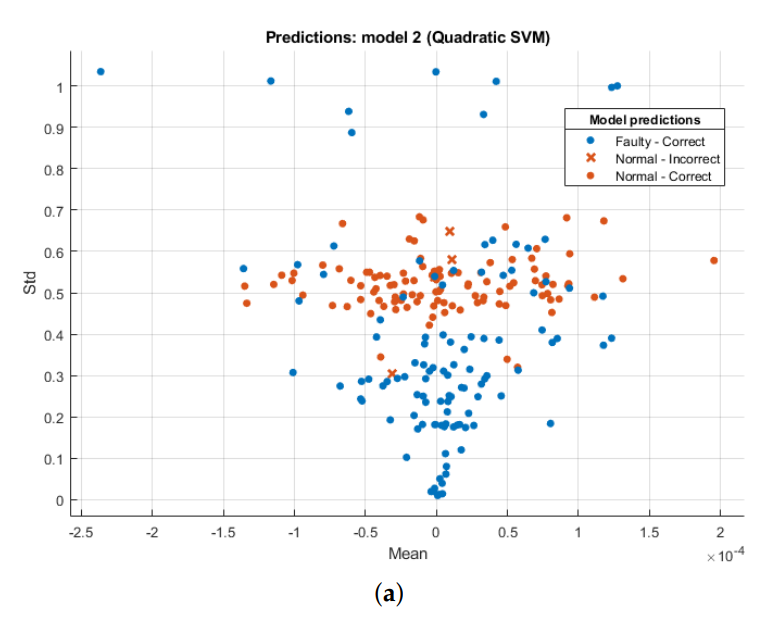
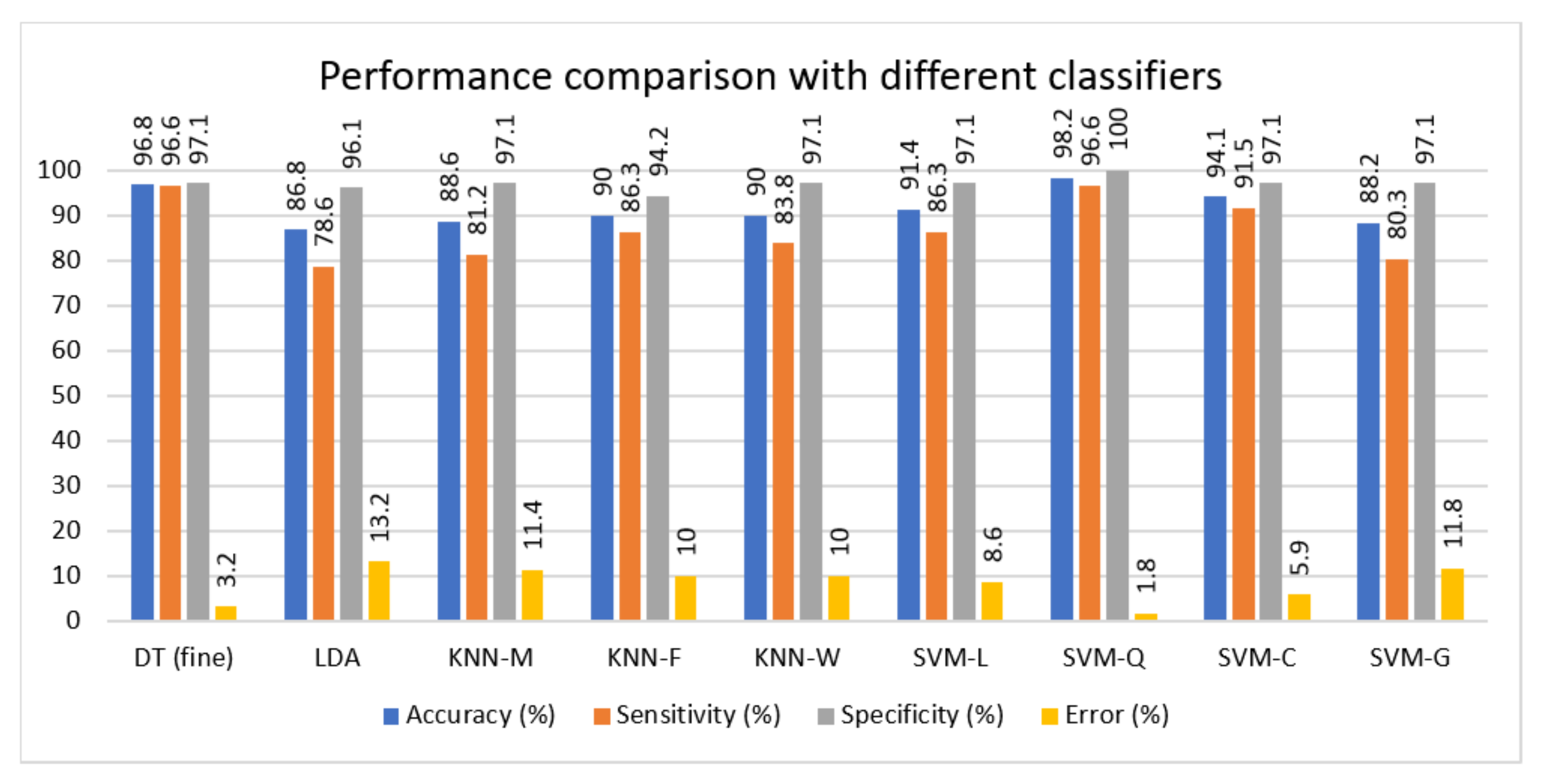
4.2. Classification Performance
5. Conclusions and Future Work
- Since, the reliability of any system based on machine learning depends upon effectiveness of collected dataset. In this work, the vibration signal dataset is constructed from real-time, practical industrial setup rather than using data collected from laboratory environment.
- In order to remove the noise contribution from practical sources, an efficient signal conditioning approach is proposed based on Empirical mode decomposition.
- While most of the published works in this domain are concentrated on using a single class of features of fault detection, this work is based on an approach based on hybrid features. we systematically analyzed the performance of different combinations of time and frequency domain features using a range of classifiers with multiple settings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSD | Power Spectral Density |
| STFT | Short Time Fourier Transform |
| DFT | Discrete Fourier Transform |
| LD | Linear dichroism |
| HT | Hilbert Transform |
| DWT | Discrete Wavelet Transform |
| CWT | Continuous Wavelet Transform |
| ANN | Artifical Neural Network |
| SVM | Support Vector Machines |
| KNN | K Nearest Neighbors |
| EMD | Empirical Mode Decomposition |
| IMF | Intrinsic Mode Function |
| RMS | Root Mean Square |
| DT | Decision Tree |
| SVM-Q | SVM with quadratic kernel |
References
- Mallak, A.; Fathi, M. Sensor and Component Fault Detection and Diagnosis for Hydraulic Machinery Integrating LSTM Autoencoder Detector and Diagnostic Classifiers. Sensors 2021, 21, 433. [Google Scholar] [CrossRef] [PubMed]
- Arellano-Espitia, F.; Delgado-Prieto, M.; Gonzalez-Abreu, A.D.; Saucedo-Dorantes, J.J.; Osornio-Rios, R.A. Deep-Compact-Clustering Based Anomaly Detection Applied to Electromechanical Industrial Systems. Sensors 2021, 21, 5830. [Google Scholar] [CrossRef]
- Jin, H.; Titus, A.; Liu, Y.; Wang, Y.; Han, Z. Fault diagnosis of rotary parts of a heavy-duty horizontal lathe based on wavelet packet transform and support vector machine. Sensors 2019, 19, 4069. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Z.; Wang, L.; Peng, G.; Li, S. WDA: An Improved Wasserstein Distance-Based Transfer Learning Fault Diagnosis Method. Sensors 2021, 21, 4394. [Google Scholar] [CrossRef]
- Safavi, S.; Safavi, M.A.; Hamid, H.; Fallah, S. Multi-Sensor Fault Detection, Identification, Isolation and Health Forecasting for Autonomous Vehicles. Sensors 2021, 21, 2547. [Google Scholar] [CrossRef]
- Huerta-Rosales, J.R.; Granados-Lieberman, D.; Garcia-Perez, A.; Camarena-Martinez, D.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M. Short-Circuited Turn Fault Diagnosis in Transformers by Using Vibration Signals, Statistical Time Features, and Support Vector Machines on FPGA. Sensors 2021, 21, 3598. [Google Scholar] [CrossRef]
- Desheng, L.; Beibei, Y.; Yu, Z.; Jinping, S. Time-frequency analysis based on BLDC motor fault detection using Hermite S-method. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; Volume 2, pp. 592–596. [Google Scholar]
- Aimer, A.F.; Boudinar, A.H.; Benouzza, N.; Bendiabdellah, A. Simulation and experimental study of induction motor broken rotor bars fault diagnosis using stator current spectrogram. In Proceedings of the 2015 3rd International Conference on Control, Engineering & Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015; pp. 1–7. [Google Scholar]
- Gu, F.C.; Bian, J.Y.; Hsu, C.L.; Chen, H.C.; Lu, S.D. Rotor Fault Identification of Induction Motor Based on Discrete Fractional Fourier Transform. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 6–8 December 2018; pp. 205–208. [Google Scholar]
- Song, X.; Wang, Z.; Hu, J. Detection of Bearing Outer Race Fault in Induction Motors using Motor Current Signature Analysis. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Vippala, S.R.; Bhat, S.; Reddy, A.A. Condition Monitoring of BLDC Motor Using Short Time Fourier Transform. In Proceedings of the 2021 IEEE Second International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2021; pp. 110–115. [Google Scholar]
- Dehina, W.; Boumehraz, M.; Kratz, F. Diagnosis and Detection of Rotor Bars Faults in Induction Motor Using HT and DWT Techniques. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 109–115. [Google Scholar]
- Zabin, M.; Choi, H.J.; Uddin, J.; Furhad, M.H.; Ullah, A.B. Industrial Fault Diagnosis using Hilbert Transform and Texture Features. In Proceedings of the 2021 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju Island, Korea, 17–20 January 2021; pp. 121–128. [Google Scholar]
- Wang, W.; Huang, Q.; Zhang, Y. On the motor fault diagnosis based on wavelet transform and ann. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 5339–5346. [Google Scholar]
- Salazar-Villanueva, F.; Ibarra-Manzano, O.G. Spectral analysis for identifying faults in induction motors by means of sound. In Proceedings of the CONIELECOMP 2013, 23rd International Conference on Electronics, Communications and Computing, Cholula, Puebla, Mexico, 11–13 March 2013; pp. 149–153. [Google Scholar]
- Abdo, A.; Siam, J.; Abdou, A.; Mustafa, R.; Shehadeh, H. Electrical Fault Detection in Three-Phase Induction Motor Based on Acoustics. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–5. [Google Scholar]
- Orman, M.; Rzeszucinski, P.; Tkaczyk, A.; Krishnamoorthi, K.; Pinto, C.T.; Sulowicz, M. Bearing fault detection with the use of acoustic signals recorded by a hand-held mobile phone. In Proceedings of the 2015 International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Bangalore, India, 10–12 December 2015; pp. 252–256. [Google Scholar]
- Liu, H.; Li, L.; Ma, J. Rolling bearing fault diagnosis based on STFT-deep learning and sound signals. Shock Vib. 2016, 2016, 6127479. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Wang, H.; Li, S.; Liu, Z.; Gui, G.; Dan, Y.; Hu, J. End-to-end convolutional neural network model for gear fault diagnosis based on sound signals. Appl. Sci. 2018, 8, 1584. [Google Scholar] [CrossRef] [Green Version]
- Raad, A.; Antoni, J.; Sidahmed, M. Indicators of cyclostationarity: Theory and application to gear fault monitoring. Mech. Syst. Signal Process. 2008, 22, 574–587. [Google Scholar] [CrossRef]
- Miao, Q.; Cong, L.; Pecht, M. Identification of multiple characteristic components with high accuracy and resolution using the zoom interpolated discrete Fourier transform. Meas. Sci. Technol. 2011, 22, 055701. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Guo, L.; Wang, Q.; An, G.; Guo, M.; Lian, H. Application to induction motor faults diagnosis of the amplitude recovery method combined with FFT. Mech. Syst. Signal Process. 2010, 24, 2961–2971. [Google Scholar] [CrossRef]
- Shi, D.; Qu, L.; Gindy, N. General interpolated fast Fourier transform: A new tool for diagnosing large rotating machinery. J. Vib. Acoust. 2005, 127, 351–361. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, M. Outer race defect width measurement in taper roller bearing using discrete wavelet transform of vibration signal. Measurement 2013, 46, 537–545. [Google Scholar] [CrossRef]
- Zuo, M.J.; Lin, J.; Fan, X. Feature separation using ICA for a one-dimensional time series and its application in fault detection. J. Sound Vib. 2005, 287, 614–624. [Google Scholar] [CrossRef]
- Wang, D.; Peter, W.T.; Guo, W.; Miao, Q. Support vector data description for fusion of multiple health indicators for enhancing gearbox fault diagnosis and prognosis. Meas. Sci. Technol. 2010, 22, 025102. [Google Scholar] [CrossRef] [Green Version]
- Ágoston, K. Fault detection of the electrical motors based on vibration analysis. Procedia Technol. 2015, 19, 547–553. [Google Scholar] [CrossRef] [Green Version]
- Finley, W.R.; Hodowanec, M.M.; Holter, W.G. An analytical approach to solving motor vibration problems. In Proceedings of the Industry Applications Society 46th Annual Petroleum and Chemical Technical Conference (Cat. No. 99CH37000), San Diego, CA, USA, 13–15 September 1999; pp. 217–232. [Google Scholar]
- Rahman, M.; Azam, T.; Saha, S.K. Motor fault detection using vibration patterns. In Proceedings of the International Conference on Electrical & Computer Engineering (ICECE 2010), Dhaka, Bangladesh, 18–20 December 2010; pp. 486–489. [Google Scholar]
- Su, H.; Chong, K.T.; Kumar, R.R. Vibration signal analysis for electrical fault detection of induction machine using neural networks. Neural Comput. Appl. 2011, 20, 183–194. [Google Scholar] [CrossRef]
- Principi, E.; Rossetti, D.; Squartini, S.; Piazza, F. Unsupervised electric motor fault detection by using deep autoencoders. IEEE/CAA J. Autom. Sin. 2019, 6, 441–451. [Google Scholar] [CrossRef]
- Chaudhari, Y.K.; Gaikwad, J.A.; Kulkarni, J.V. Vibration analysis for bearing fault detection in electrical motors. In Proceedings of the 2014 First International Conference on Networks & Soft Computing (ICNSC2014), Guntur, India, 19–20 August 2014; pp. 146–150. [Google Scholar]
- Aziz, S.; Ahmed, M.; Naqvi, S.Z.H.; Khan, M.U.; Imtiaz, A.; Waseem, A. Machine Bearing Fault Diagnosis System using Tri-Axial Accelerometer. In Proceedings of the 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Istanbul, Turkey, 12–13 June 2020; pp. 1–6. [Google Scholar]
- Venkata, S.K.; Rao, S. Fault detection of a flow control valve using vibration analysis and support vector machine. Electronics 2019, 8, 1062. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Sánchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault diagnosis for rotating machinery using vibration measurement deep statistical feature learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef] [Green Version]
- Yetis, H.; Karakose, M.; Aydin, I.; Akin, E. Bearing fault diagnosis in traction motor using the features extracted from filtered signals. In Proceedings of the 2019 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 21–22 September 2019; pp. 1–4. [Google Scholar]
- Ye, F.; Zhang, Z.; Chakrabarty, K.; Gu, X. Board-level functional fault diagnosis using multikernel support vector machines and incremental learning. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2014, 33, 279–290. [Google Scholar] [CrossRef]
- Sakhalkar, N.P.; Korde, P. Fault detection in induction motors based on motor current signature analysis and accelerometer. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017; pp. 363–367. [Google Scholar]
- Weng, P.Y.; Liu, M.K. Roller bearing fault diagnosis based on wavelet packet decomposition and support vector machine. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; pp. 33–36. [Google Scholar]
- Zheng, H.; Zhou, L. Rolling element bearing fault diagnosis based on support vector machine. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; pp. 544–547. [Google Scholar]
- Han, J.H.; Choi, D.J.; Hong, S.K.; Kim, H.S. Motor fault diagnosis using CNN based deep learning algorithm considering motor rotating speed. In Proceedings of the 2019 IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 2–15 April 2019; pp. 440–445. [Google Scholar]
- Li, R.; He, D. Rotational machine health monitoring and fault detection using EMD-based acoustic emission feature quantification. IEEE Trans. Instrum. Meas. 2012, 61, 990–1001. [Google Scholar] [CrossRef]
- Shen, Z.; Chen, X.; Zhang, X.; He, Z. A novel intelligent gear fault diagnosis model based on EMD and multi-class TSVM. Measurement 2012, 45, 30–40. [Google Scholar] [CrossRef]
- Aziz, S.; Khan, M.U.; Alhaisoni, M.; Akram, T.; Altaf, M. Phonocardiogram Signal Processing for Automatic Diagnosis of Congenital Heart Disorders through Fusion of Temporal and Cepstral Features. Sensors 2020, 20, 3790. [Google Scholar] [CrossRef]
- Nandy, A. Statistical methods for analysis of parkinson’s disease gait pattern and classification. Multimed. Tools Appl. 2019, 78, 19697–19734. [Google Scholar] [CrossRef]
- Caesarendra, W.; Tjahjowidodo, T. A review of feature extraction methods in vibration-based condition monitoring and its application for degradation trend estimation of low-speed slew bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Class Name | Signals | Duration | Signal Size |
|---|---|---|---|
| Normal | 103 | 8.5 min | 5 s |
| Faulty | 117 | 9.75 min | 5 s |
| Total | 220 | 18.25 min | - |
| Time Domain | Frequency Domain | ||
|---|---|---|---|
| Feature | Acronym | Feature | Acronym |
| Mean | M | Mean Frequency | FM |
| Standard Deviation | SD | Frequency Standard Deviation | FSD |
| Skewness | SK | Skewness of Frequency | FSK |
| Kurtosis | KR | Kurtosis of Frequency | FKR |
| Peak to Peak | PP | Band Power | BPWR |
| Root Mean Square | RMS | Median Frequency | FMED |
| Energy | E | Spectral Centroid | SC |
| Spectral Flux | SF | ||
| Spectral Roll Off | SRO | ||
| Spectral Flatness | SFL | ||
| Spectral Crest | SCR | ||
| Spectral Decrease | SDEC | ||
| Spectral Slope | SSL | ||
| Spectral Spread | SS | ||
| Feature Set | Size | Feature Class | Features in the Set | Accuracy (%) | |
|---|---|---|---|---|---|
| SVM-Q | KNN = W | ||||
| F1 | 7 | Temporal | M,SD,SK,KR,PP,RMS,E | 90.5 | 90.0 |
| F2 | 6 | Frequency | FM,FSD,FSK,FKR,BPWR,FMED | 94.1 | 93.6 |
| F3 | 8 | Frequency | SC,SF,SRO,SFL,SCR,SDEC,SSL,SS | 94.1 | 92.3 |
| F4 | 13 | Hybrid | M,SD,SK,KR,PP,RMS,E FM,FSD,FSK,FKR,BPWR,FMED | 98.2 | 90.0 |
| F5 | 14 | Hybrid | FM, FSD, FSK, FKR,BPWR,FMED, SC,SF,RO,SFL,SCR,SDEC,SL,SS | 95 | 91.4 |
| F6 | 15 | Hybrid | M, SD, SKW,KR,PP,RMS,E, SC,SF,SRO,SFL,SCR,SDEC,SSL,SS | 91.4 | 91.4 |
| F7 | 21 | Hybrid | M,SD,SK,KR,PP,RMS,E FM,FSD,FSK,FKR,BPWR,FMED SC,SF,SRO,SFL,SCR,SDEC,SSL,SS | 96.5 | 90.5 |
| Classifier | Accuracy (%) | Sensitivity (%) | Specificity (%) | Error (%) |
|---|---|---|---|---|
| DT (fine) | 96.8 | 96.6 | 97.1 | 3.2 |
| LDA | 86.8 | 78.6 | 96.1 | 13.2 |
| KNN-M | 88.6 | 81.2 | 97.1 | 11.4 |
| KNN-F | 90 | 86.3 | 94.2 | 10 |
| KNN-W | 90 | 83.8 | 97.1 | 10 |
| SVM-L | 91.4 | 86.3 | 97.1 | 8.6 |
| SVM-Q | 98.2 | 96.6 | 100 | 1.8 |
| SVM-C | 94.1 | 91.5 | 97.1 | 5.9 |
| SVM-G | 88.2 | 80.3 | 97.1 | 11.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kafeel, A.; Aziz, S.; Awais, M.; Khan, M.A.; Afaq, K.; Idris, S.A.; Alshazly, H.; Mostafa, S.M. An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis. Sensors 2021, 21, 7587. https://doi.org/10.3390/s21227587
Kafeel A, Aziz S, Awais M, Khan MA, Afaq K, Idris SA, Alshazly H, Mostafa SM. An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis. Sensors. 2021; 21(22):7587. https://doi.org/10.3390/s21227587
Chicago/Turabian StyleKafeel, Ayaz, Sumair Aziz, Muhammad Awais, Muhammad Attique Khan, Kamran Afaq, Sahar Ahmed Idris, Hammam Alshazly, and Samih M. Mostafa. 2021. "An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis" Sensors 21, no. 22: 7587. https://doi.org/10.3390/s21227587
APA StyleKafeel, A., Aziz, S., Awais, M., Khan, M. A., Afaq, K., Idris, S. A., Alshazly, H., & Mostafa, S. M. (2021). An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis. Sensors, 21(22), 7587. https://doi.org/10.3390/s21227587