Abstract
The issues of state estimations based on distributed observers for linear time-invariant (LTI) systems with multiple sensors are discussed in this paper. We deal with the scenario when the information exchange has known time delays, and aim at designing a distributed observer for each subsystem such that each distributed observer can estimate the system state asymptotically by rejecting the time delay. To begin with, by rewriting the target system in a connecting form, a subsystem which is affected by the time-delay states of other nodes is established. And then, for this subsystem, a distributed observer with time delay is constructed. Moreover, an equivalent state transformation is made for the observer error dynamic system based on the observable canonic decomposition theorem. Further, in order to ensure that the distributed observer error dynamic system is asymptotically stable even if there exists a time delay, a linear matrix inequality (LMI) which is relative to the Laplace matrix is elaborately set up, and a special Lyapunov function candidate based on the LMI is considered. Next, based on the Lyapunov function and Lyapunov stability theory, we prove that the error dynamic system of the distributed observer is asymptotically stable, and the observer gain is determined by a feasible solution of the LMI. Finally, a simulation example is given to illustrate the effectiveness of the proposed method.
1. Introduction
A state observer is a dynamic system which is constructed by using the measurement output together with the control input of the original system, such that the dynamic system can generate the state estimates of the original system. The motivation of developing the state estimation concept is that for most practical systems, the state information is difficult, expensive or even impossible to measure directly. The model-based state estimation theory has attracted extensive attention and has been gradually improved to meet the needs of practical engineering applications since the Luenberger observer was proposed in the 1960s [,]. After that, all kinds of observer design methods corresponding to various complex scenarios have been developed, such as the unknown input observer (UIO) [,], the time-delay observer [,], the sliding model observer [,,], and the reduced-order observer [,]. For example, Zhu et al. propose a joint UIO which is able to offer the asymptotic convergent estimations of state and unknown input simultaneously []. Edwards et al. design a sliding model observer to reconstruct the actuator fault []. In [], a reduced-order observer is constructed for a descriptor system with disturbance appearing in both the state equation and output equation.
Recently, the distributed observer which can reconstruct the entire system states based on partial output information through information exchange has gained much attention. For a target system monitored by a group of sensor nodes, the objective of a distributed observer is to asymptotically estimate the state of the target system using its local measurements together with information exchange with neighbors. The motivations for designing distributed observers are mainly of two kinds. To begin with, it is particularly beneficial for large-scale systems, such as the electrical power system [,], water irrigation system [], intelligent vehicles [] and so on, to obtain state estimates using multiple sensors deployed in different geographic or spatial locations. Sensors with computation and communication functions are available and this allows integration between observers and local sensors. To date, many significant results on distributed observers have been published in the literature [,,,,,,,,,,,,,,,,]. For example, a theoretically robust and computationally efficient distributed state estimator is proposed in [], which is a typical application of a distributed observer in a power system. By using the observability decomposition of target systems and introducing an auxiliary undirected graph, paper [] discusses a Luenberger-type distributed observer for linear systems based on LMIs and then a Luenberger-type distributed observer design method is given. An approach for solving the problem of the distributed state estimation of LTI systems is proposed in [], where the distributed state observation task is reformulated as a parameter estimation problem, and the estimation convergence is achieved in finite time.
In the domain of networked control systems, many challenging problems require solution. For example, Cai et al. [] develop a novel control scheme that ensures mean square leader–follower consensus in the presence of unknown transfer probabilities and system perturbations. The proposed method incorporates an observer to reconstruct system states and an adaptive event-triggered mechanism to dynamically adjust communication, thereby enhancing the overall efficiency and robustness of the MASs. Cao et al. [] present an adaptive NN-based observer for MASs with time-varying delays, offering a low-gain approach to enhance the state estimating and tracking accuracy through a dynamic event-triggered control strategy. In [], an adaptive NN and low-gain observer in a dynamic event-triggered control framework is introduced to ensure fixed-time cooperative formation for MASs. Wang et al. [] propose an observer-based sliding mode control approach for networked fuzzy singularly perturbed systems, enhancing system stability and performance under the weighted try-once-discard protocol. Different from traditional observers, distributed observers have to be dealt with in terms of the network construction. As a result, one of the exclusive features of distributed observers is that information exchange is necessary such that each local observer is able to generate the state estimates. It is this exclusive feature that implies there are extra concerns when we design a distributed observer, especially with respect to requirements from information exchange links. These problems include data transfer delays, data transfer blocks, data losses, or even communication channels suffering from malicious attacks. For distributed observer designs, coping with the above-mentioned problems has been taken into account by some researchers [,,,,,,,,,]. For example, ref. [] provides a survey of recent advances in distributed event-triggered estimation for dynamical systems operating over resource-constrained sensor networks. In paper [], a hybrid observer is discussed which can provide estimations asymptotically even if one or several agents join or leave the internet. Aiming at the multi-observer network system with time delay and packet loss in information communication, paper [] proposes a distributed estimation problem of system state realized by a continuous time-distributed observer. In paper [], the distributed estimation problem is solved based on LMI, where the digital communication between the observer nodes is modeled by the time-delay approach in which variable sampling intervals, transmission delays, and packet dropouts are taken into account. Papers [,] focus on the construction of distributed observers in the presence of arbitrarily large communication time delays. Paper [] designs a distributed observer for scenarios of both state-dependent and non-state-dependent noise occurring in information exchange. The issues of the communication delay and communication frequency in distributed state estimation using a unified structure are addressed in [].
Based on the above observations, in this paper, we focus on coping with the problems of information communication delays in constructing a distributed observer for an LTI system. The major contributions of the paper are summarized as follows:
- (1)
- By making good use of the special structure of the Laplacian matrix of the communication topology, the state equation of the target system is rewritten in a connecting form, while the information transfer delay is considered. In this way, a distributed observer design model with information communication delays is set up.
- (2)
- Referring to the design model, a distributed observer is designed, in which the time delay caused by the information communication is robustly rejected by constructing a special Lyapunov function which contains two parts, which are dependent on each other through an LMI which is predefined elaborately. And the observer gains can be obtained by solving a single LMI.
The rest of the paper is organized as follows: In Section 2, notations, concepts used, and a system description are given. In Section 3, the main results about the distributed observer which can reject the time delay are presented. In Section 4, a simulation example is given to illustrate the effectiveness of the proposed method. Section 5 gives the conclusions.
2. Preliminaries and System Description
2.1. Notation
Notation 1.
For a square symmetric matrix , () means that M is a symmetric negative (positive) definite matrix. Suppose () are N matrices or scalars, notation stands for a diagonal (block) matrix with () being the diagonal entries (block matrices).
2.2. Basic Graph Theory
For a complex network with N nodes labeled by , the information flow among the N nodes is described by a directed weighted graph , where stands for the node set , and denotes the edge set. Further, define an adjacency matrix to describe the connection condition between any two nodes. Specifically, set if , which means that node i can receive information from node j; and if . We always assume that , which implies that for all . Let be the Laplacian matrix with and . If we further define , then we have .
Definition 1.
The graph is said to be strong connected if there exists a directed path for any two notes in .
Lemma 1
([]). Let be a strongly connected directed graph with N nodes and be its Laplacian matrix. Then, the following statements hold.
(i) There exists a vector satisfying , and .
(ii) Define matrix with , then is a symmetric Laplacian matrix associated with a connected undirected graph obtained from by ignoring the directions of all the edges.
2.3. System Formulation
Consider a linear system with N sensors, where the ith node or subsystem is described by
where , and are the system state, measurement output and control input vectors, respectively. , and are all known constant matrices. Here, we assume that is neither observable nor detectable for all . Therefore, for the ith subsystem, it is impossible for one to design an observer to obtain the state estimation of the system only by using the local sensor output . Moreover, we assume that the pair is observable, where , and .
3. Distributed Observer with Communication Time Delay
From the construction of the Laplacian matrix , we know that . Thus, the ith subsystem (1) can also be rewritten as
where is a scalar and is a gain matrix to be designed later, while is an arbitrary scalar which stands for the time delay due to the information exchange between any two subsystem and it is assumed to be known.
Since is unobservable, which means that , where . Thus, based on the observable canonic decomposition theorem, there must exist an orthogonal matrix satisfying such that and with , , and . Further, the pair is observable. For the discussion, we need to decompose matrix into a black matrix as , where and .
Remark 1.
To design a distributed observer, we rewrite system (1) into (2), by making good use of the property of the information communication topology, such that the rewritten system (2) is in the form of a distributed feature. Moreover, in this way, the time delay, which is caused because of the information exchange, is characterized in the model. Therefore, based on the rewritten system (2), we can conveniently handle the time delay problem brought by the information communication.
Now, design a distributed observer for system (2) as follows:
The observer error dynamic system can be obtained by subtracting (3) from (2):
where . In what follows, make an equivalent state transformation of , and choose with being a gain matrix to be determined later, then we obtain an equivalent system of (4) as follows:
where and .
Moreover, denote , , and with and , then, (5) can also be rewritten as
The overall system of the first equation of (6) is
where , , and . The overall system of the second equation of (6) is
where , , , and . Then, the combination of (7) and (8) is
where , and .
Lemma 2
([]). Under the assumption that this is strongly connected and the pair is detectable, then, is a symmetric positive definite matrix, where is defined in Lemma 1.
Suppose that , , and are a series of symmetric positive definite matrices, then define , , and . Moreover, for a proper , construct
where is a scalar. Under the assumption that the LMI
is feasible for and , then and are both symmetric positive definite matrices. Now, for the overall error dynamic system (9), consider the Lyapunov function candidate
The derivative of given by (12) along the trajectory of (9) is
where
where is determined by (10) and
with .
Theorem 1.
If the following LMI
has solutions for symmetric positive definite matrices , , and , then the overall observer time-delay error dynamic system (9) is asymptotically stable.
Proof.
By the Schur complement lemma, LMI (16) is feasible implies that LMI (11) is feasible. Therefore, P and are two symmetric positive definite matrices, and this indicates that given by (12) is a positive scalar function which can serve as Lyapunov function. It follows from (16) and (14)
Furthermore, (17) and (13) ensure that the overall error dynamic system (9) is asymptotically stable. Define , and ; then, we have the following Algorithm for constructing the distributed time-delay observer (3). □
Remark 2.
The decentralized control theory is employed to address the distributed estimation problem in []. The author provides a general framework for state estimators and outlines constraints on the observer parameters that can influence the convergence rate. Halanay’s inequality is utilized to account for the impact of time-varying delays. In contrast, we have directly proven that the derivative of the Lyapunov functional with respect to time is negative based on selecting a special Lyapunov function candidate which consists of two parts, and the two parts are related with each other. And eventually, the asymptotic stability of the observer error system can be guaranteed by an LMI.
Lemma 3.
is a Hurwitz matrix provided that c is large enough. And this means that for some , there exists such that , where is expressed in (15).
Proof.
Define , which is obviously a symmetric positive matrix; then, we have
where is defined in Lemma 1. By Lemma 2, is a symmetric positive definite matrix. Therefore, if we choose , then
As a result, by Lyapunov stability theory, we conclude that is Hurwitz. Furthermore, again by Lyapunov theory, for some , there exists such that , where is expressed in (15). □
Lemma 4.
Under the assumption that the following LMI
is feasible, then if there exists a c satisfying
then, LMI (16) is feasible, where and .
Proof.
LMI (18) is equivalent to . On the other hand, by the Schur complement lemma, we know that (16) is equivalent to , which can be guaranteed by (18). □
Remark 3.
The feasibility of LMI (16) confirms the feasibility of LMI (11), which can ensure that matrices and are symmetric positive definite matrices. These two matrices are utilized to construct symmetric positive definite matrices P and Ω, and this allows for the selection of Lyapunov function candidate (12) satisfying the condition . Furthermore, the positive definite matrix solution is used to calculate the observer gain matrix ; thereby, the design of our distributed observer can be accomplished. Hence, LMI (16) plays an important role in the designs.
Corollary 1.
Suppose that the LMI (16) is feasible, and calculate the observer gain matrix based on Algorithm 1, then system (3) is a distributed time-delay state observer of the ith subsystem (2) or (1).
| Algorithm 1 Algorithm for constructing a distributed observer |
|
4. Simulation
4.1. Example 1
Consider a linear system (1) with 4 subsystems, the parameters of the systems are
Here, it can be seen that is neither observable nor detectable for all but is observable. The topology of the graph is illustrated by Figure 1; the Laplacian matrix can be obtained.
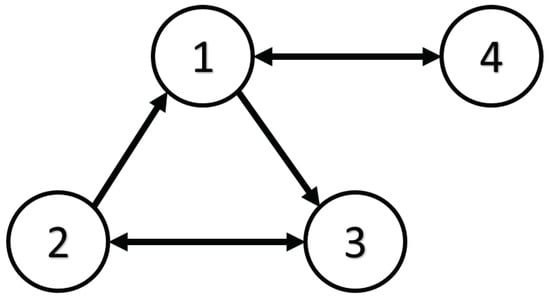
Figure 1.
The communication graph topology.
Furthermore, we assume that the time delay is and the initial values for the target system and all observers are initialized at [0 0 0 0 0 0 . By setting , , , the LMI (16) is feasible for , , , and , we can obtain:
By Algorithm 1, we can obtain , , (), and then calculate the observer gain matrix and , ():
Finally, we can calculate out that:
Based on the above calculation results, the distributed observer (4) can be constructed. The state and their estimates of each node are depicted in Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8. It can be seen that all estimates converge to the actual state asymptotically.
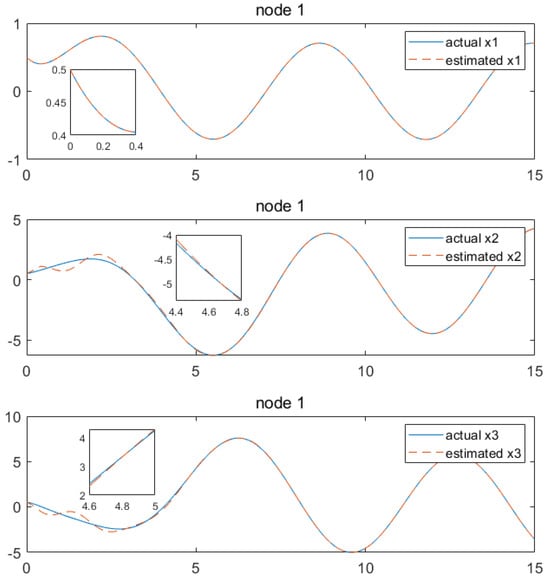
Figure 2.
State estimations of by node 1.
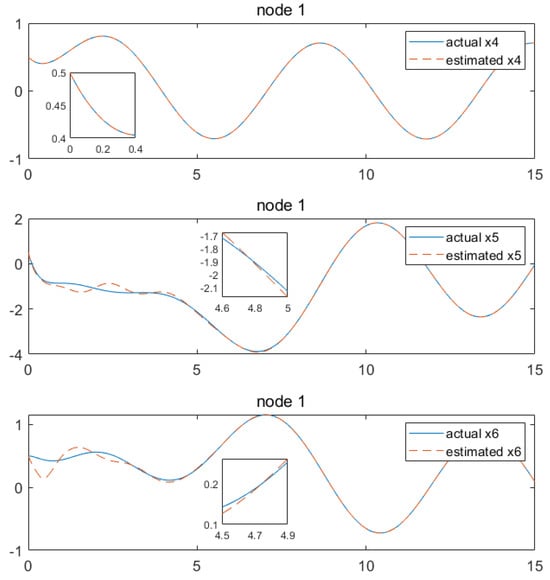
Figure 3.
State estimations of by node 1.
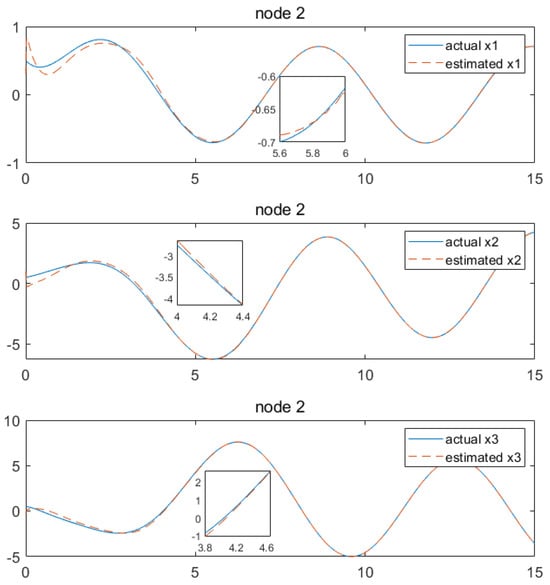
Figure 4.
State estimations of by node2.
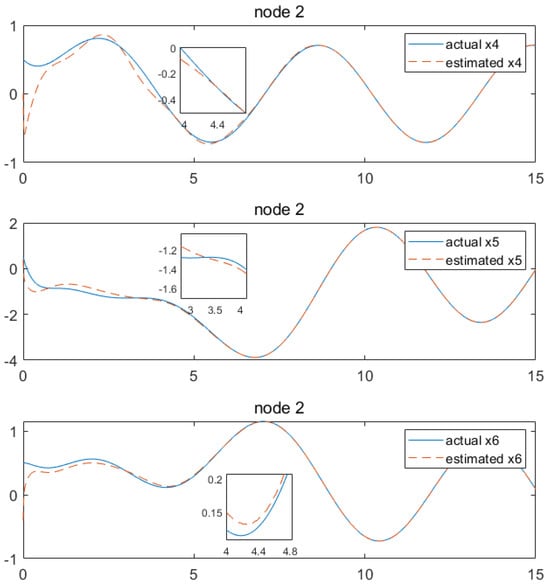
Figure 5.
State estimations of by node 2.
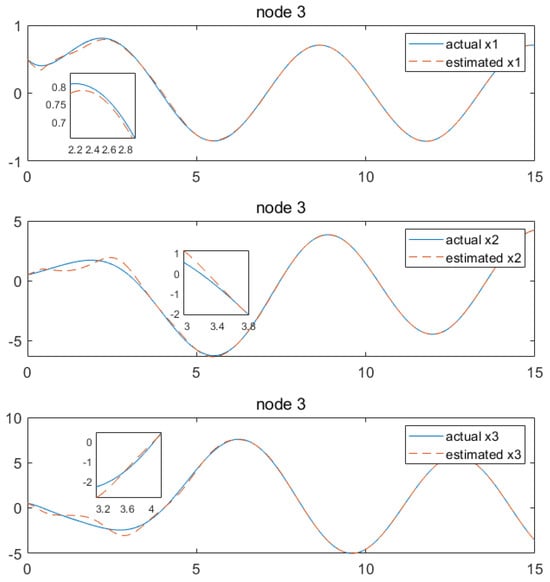
Figure 6.
State estimations of by node 3.
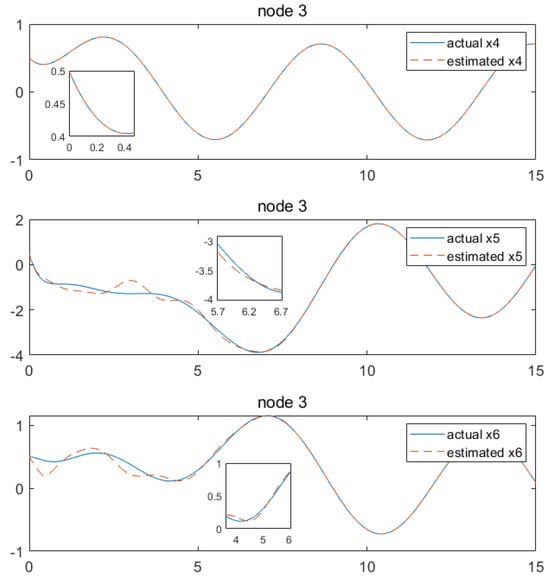
Figure 7.
State estimations of by node 3.
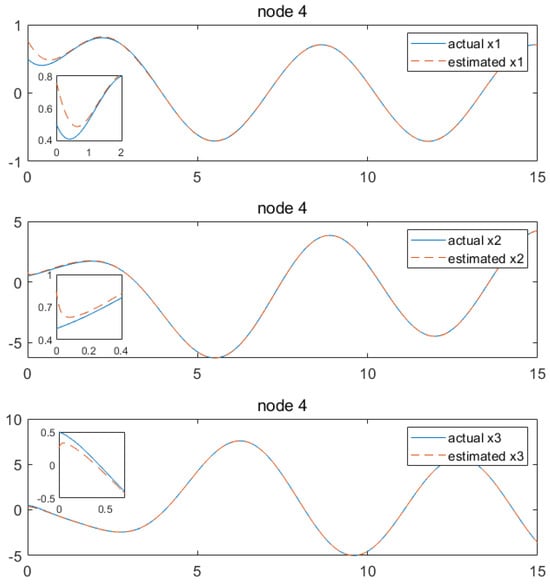
Figure 8.
State estimations of by node 4.
In Figure 2 and Figure 3 for node 1, the state estimation and reach the convergence at the beginning, while , , and achieve convergence later, at around 4.7 s.
In Figure 4 and Figure 5 for node 2, the state estimations of and can be realized at approximately 5.9 s, while , , and achieve convergence at around 3.4 s, 4.4 s, 4.7 s, 4.2 s and 3.4 s, respectively.
Figure 6 and Figure 7 provide the state estimations by node 3, which show that the state estimation has the convergence at approximately 2.6 s, while and achieve convergence at around 3.6 s. Lastly, and convergence can be achieved at 6.4 and 4.5 s, respectively.
In Figure 8 and Figure 9 for node 4, the convergences of the state estimations of , , , , and can be realized at 1 s, 0.2 s, 0.4 s, 2.7 s, 0.9 s and 1.1 s, respectively. In the depicted scenario, each node observer exhibits rapid convergence. That is, we conclude that the convergence characteristics depend greatly on the output information received by each node, showing the distributed characteristics of the observer. Currently, our method is capable of handling estimations for information communication with a time delay which is less than 0.5 s. Beyond this threshold, convergence cannot be achieved. As illustrated, when the time delay is set as 0.6 s, taking node 1 as an example, it can be observed from Figure 10 and Figure 11 that the state estimations cannot be accomplished asymptotically. This is an aspect that requires further investigation.
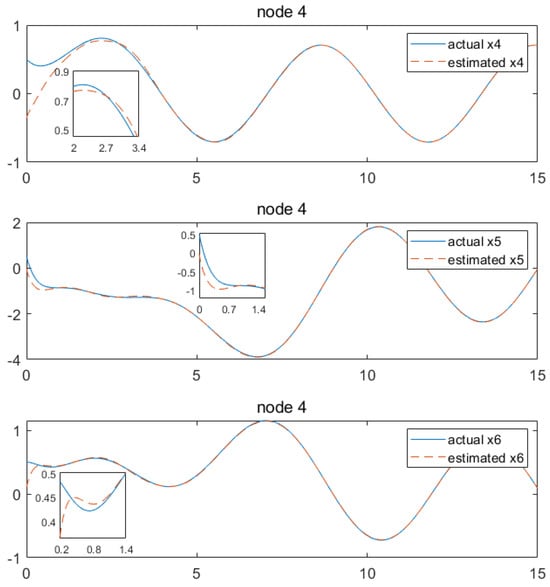
Figure 9.
State estimations of by node 4.
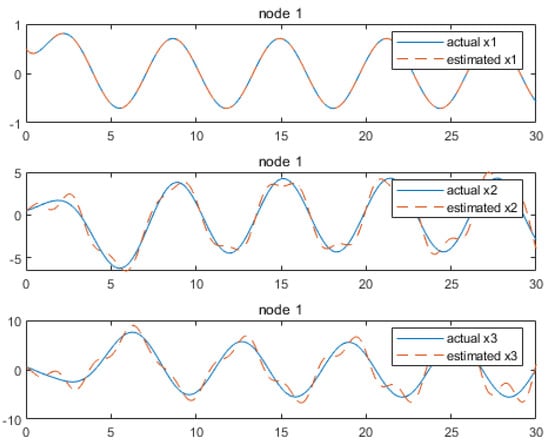
Figure 10.
State estimations of by node 1 (Latency set to 0.6 s).
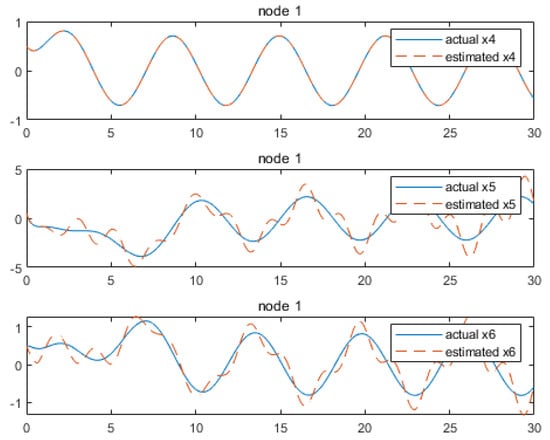
Figure 11.
State estimations of by node 1 (Latency set to 0.6 s).
4.2. Example 2
In this part, the proposed distributed observer design strategy is tested by a mobile robot system with four sensor groups, where the information communication topology is depicted in Figure 1. The robot dynamic system is formulated as []
where denotes the center position of the robot, indicates the heading angle in the inertial frame, and and are, respectively, the linear velocity and angular velocity. Define and , where and are the components of the linear velocities along the X- and Y-axes, respectively, and and are the components of the input signals along the X- and Y-axes, respectively. The system model can be linearized and the system matrices are:
For this configuration of sensors, we obtain that , , , and . Furthermore, we confirm that is observable. Assuming a delay of 0.4, with the target system initialized at a value of [0.7 0.7 0.7 0.7 , and the observers labeled 1 through 4 are initialized at values of [0.3 0.3 0.3 0.3 , [ 0.2 0.2 0.2 0.2 , [ 0 0 0 0 and [0.9 0.9 0.9 0.9 , respectively, and with , , , the LMI (16) is feasible for , , , and , we can obtain:
As a supplementary example, further elaboration on the remaining parameters is omitted; the Figure 12, Figure 13, Figure 14 and Figure 15 demonstrate that the distributed observer proposed in this study effectively estimates the states of the target system. It can be seen that all states estimates converge to the actual states asymptotically.
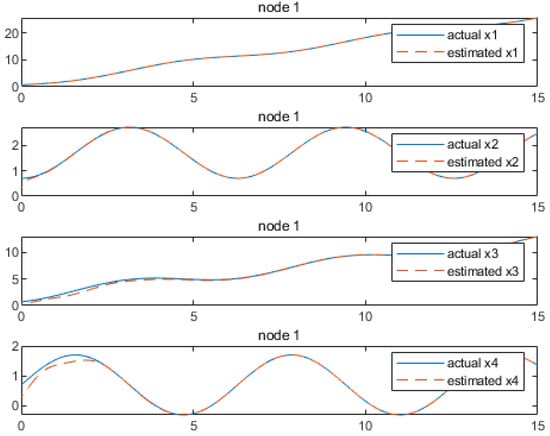
Figure 12.
State estimations by node 1.
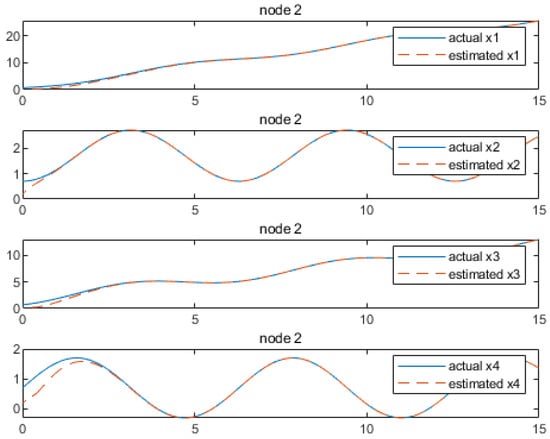
Figure 13.
State estimations by node 2.
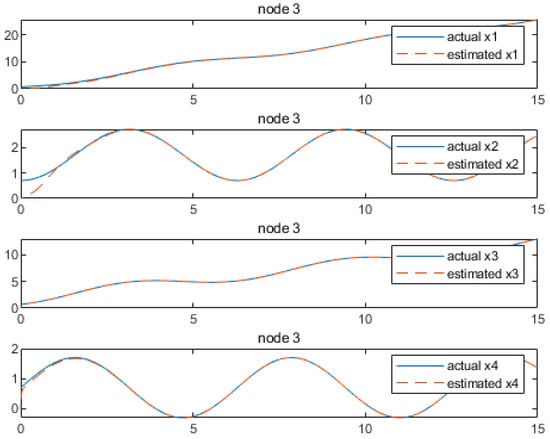
Figure 14.
State estimations by node 3.
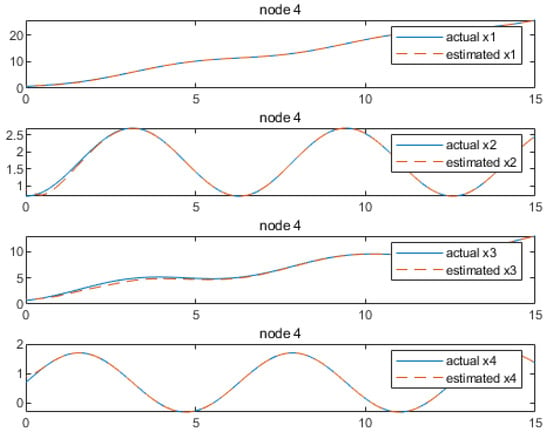
Figure 15.
State estimations by node 4.
5. Conclusions
This paper addresses time-delay issues due to the information exchange in distributed observer design. Distributed observers are constructed for systems based on the information exchange among the nodes and the information transmission may lead to time delay. To deal with the time delay, for each node, an equivalent system is set up which is a model containing time-delay statistics received from its neighbours. To eliminate the negative influence of the time delay, a special Lyapunov function is constructed which contains two parts and the two parts are associated with each other. The stability analysis is carried out based on the Lyapunov function and the observer gain matrix for each distributed observer is calculated by an LMI. How to deal with communication time delays which are not only time varying but also unknown will be one of our further focuses of research. Furthermore, considering a more complicated model with parameter variations or unknown inputs is also an interesting issue that deserves to be investigated in the future.
Author Contributions
Methodology, W.F.; software, F.Z.; formal analysis, W.F. and F.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (grant number 61973236).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| LTI | Linear Time-Invariant |
| LMI | Linear Matrix Inequality |
| UIO | Unknown Input Observer |
References
- Luenberger, D. Observers for Multivariable Systems. IEEE Trans. Autom. Control 1966, 11, 190–197. [Google Scholar] [CrossRef]
- Luenberger, D. An Introduction to Observer. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Zhu, F.; Fu, Y.; Dinh, T.N. Asymptotic convergence unknown input observer design via interval observer. Automatica 2023, 147, 2–10. [Google Scholar] [CrossRef]
- Zhu, F.; Tan, C. Consensus Control of Linear Parameter-Varying Multi-Agent Systems with Unknown Inputs. Sensors 2023, 23, 5125. [Google Scholar] [CrossRef]
- Bhat, K.; Koivo, H. An Observer Theory for Time-Delay Systems. IEEE Trans. Autom. Control 1976, 21, 266–269. [Google Scholar] [CrossRef]
- Marquez-Martinez, L.; Moog, C.; Velasco-Villa, M. Observability and observers for nonlinear systems with time delays. In Proceedings of the IFAC Workshop on Linear Time Delay Systems, Kidlington, UK, 11–13 September 2000. [Google Scholar]
- Edwards, C.; Spurgeon, S.; Patton, R. Sliding mode observers for fault detection and isolation. Automatica 2000, 36, 541–553. [Google Scholar] [CrossRef]
- Kalsi, K.; Lian, J.; Hui, S.; Zak, S. Sliding-mode observers for systems with unknown inputs: A high-gain approach. Automatica 2010, 46, 347–353. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, J.; Gao, T.; Ren, S. State of Charge Estimation of Li-Ion Battery Based on Adaptive Sliding Mode Observer. Sensors 2022, 22, 7678. [Google Scholar] [CrossRef]
- MA, L.; Zhu, F.; Zhang, J.; Zhao, X. Leader-Follower Asymptotic Consensus Control of Multiagent Systems: An Observer-Based Disturbance Reconstruction Approach. IEEE Trans. Cybern. 2023, 53, 1311–1323. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X.; Zhu, F.; Karimi, H. Reduced-order observer design for switched descriptor systems with unknown inputs. IEEE Trans. Autom. Control 2020, 65, 287–294. [Google Scholar] [CrossRef]
- Lin, S. A distributed state estimator for electric power systems. IEEE Trans. Power Syst. 1992, 7, 551–557. [Google Scholar] [CrossRef]
- D’Antona, G.; Monti, A.; Ponci, F.; Rocca, L. A Distributed State Estimator for Electric Power Systems in Avionic and Naval Applications. In Proceedings of the 2006 IEEE Instrumentation and Measurement Technology Conference Proceedings, Sorrento, Italy, 24–27 April 2006. [Google Scholar]
- Lopez-Jimenez, J.; Quijano, N.; Vande Wouwer, A. Agent-based sensor location strategy for smart irrigation of large crop fields. Comput. Electron. Agric. 2023, 214, 3–12. [Google Scholar] [CrossRef]
- Xu, H.; Liu, S.; Wang, B.; Wang, J. Distributed-Observer-Based Distributed Control Law for Affine Nonlinear Systems and Its Application on Interconnected Cruise Control of Intelligent Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 1874–1888. [Google Scholar] [CrossRef]
- Han, W.; Trentelman, H.; Wang, Z.; Shen, Y. A Simple Approach to Distributed Observer Design for Linear Systems. IEEE Trans. Autom. Control 2019, 64, 329–336. [Google Scholar] [CrossRef]
- Yang, G.; Rezaee, H.; Alessandri, A.; Parisini, T. State estimation using a network of distributed observers with switching communication topology. Automatica 2023, 147, 110690. [Google Scholar] [CrossRef]
- Ortega, R.; Nuno, E.; Bobtsov, A. Distributed Observers for LTI Systems with Finite Convergence Time: A Parameter-Estimation-Based Approach. IEEE Trans. Autom. Control 2021, 66, 4967–4974. [Google Scholar] [CrossRef]
- Cai, J.; Wang, J.; Feng, J.; Chen, J. Observer-Based Consensus for Multi-Agent Systems with Semi-Markovian Jumping via Adaptive Event-Triggered SMC. IEEE Trans. Netw. Sci. Eng. 2023, 10, 1736–1751. [Google Scholar] [CrossRef]
- Cao, L.; Pan, Y.; Liang, h.; Huang, T. Observer-Based Dynamic Event-Triggered Control for Multiagent Systems with Time-Varying Delay. IEEE Trans. Cybern. 2023, 53, 3376–3387. [Google Scholar] [CrossRef]
- Cao, L.; Cheng, Z.; Liu, Y.; Li, H. Event-Based Adaptive NN Fixed-Time Cooperative Formation for Multiagent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 6467–6477. [Google Scholar] [CrossRef]
- Wang, J.; Yang, C.; Xia, J.; Wu, Z.; Shen, H. Observer-Based Sliding Mode Control for Networked Fuzzy SPSs. IEEE Trans. Fuzzy Syst. 2022, 30, 1889–1899. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.; Zhang, X.; Ding, L.; Yang, F. Distributed Event-Triggered Estimation over Sensor Networks: A Survey. IEEE Trans. Cybern. 2020, 50, 1306–1320. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Morse, A. A hybrid observer for estimating the state of a distributed linear system. Automatica 2022, 146, 110633. [Google Scholar] [CrossRef]
- Silm, H.; Ushirobira, R.; Efimov, D.; Fridman, E.; Richard, J.; Michiels, W. Distributed Observers with Time-Varying Delays. IEEE Trans. Autom. Control 2021, 66, 5354–5361. [Google Scholar] [CrossRef]
- Ghotb, H.; Ataei, M.; Siahi, M.; Moarefianpour, A. Distributed state estimation for uncertain nonlinear time-delay AC islanded micro grids. Proc. Inst. Mech. Eng. Part J. Syst. Control. Eng. 2023, 238, 327–343. [Google Scholar] [CrossRef]
- Liu, K.; Lu, J.; Lin, Z. Design of distributed observers with arbitrarily large communication delays. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Florence, Italy, 23–26 October 2016; pp. 84–89. [Google Scholar]
- Liu, K.; Lu, J.; Lin, Z. Design of distributed observers in the presence of arbitrarily large communication delays. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4447–4461. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Zhu, Z.; Zeng, X.; Wang, J. Distributed Observers for State Omniscience with Stochastic Communication Noises. Mathematics 1997, 11, 1997. [Google Scholar] [CrossRef]
- Mast, J.; Liu, Z.; Wang, Z.; Stursberg, O. A Unified Approach to Communication Delay and Communication Frequency in Distributed State Estimation of Linear Systems. IEEE Control Syst. Lett. 2023, 7, 2755–2760. [Google Scholar] [CrossRef]
- Kim, T.; Lee, C.; Shim, H. Completely Decentralized Design of Distributed Observer for Linear Systems. IEEE Trans. Autom. Control 2020, 65, 4664–4678. [Google Scholar] [CrossRef]
- Mei, J.; Ren, W.; Chen, J. Distributed Consensus of Second-Order Multi-Agent Systems with Heterogeneous Unknown Inertias and Control Gains under a Directed Graph. IEEE Trans. Autom. Control 2016, 61, 2019–2034. [Google Scholar] [CrossRef]
- Ma, L.; Zhu, F. Human-in-the-loop formation control for multi-agent systems with asynchronous edge-based event-triggered communications. Automatica 2024, 167, 111744. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).