
Estimation of Ground Reaction Forces during Sports Movements by Sensor Fusion from Inertial Measurement Units with 3D Forward Dynamics Model


Abstract
:1. Introduction
2. Ground Reaction Force Estimation Methods
- Height and weight are input into the system and human model construction based on the inertia parameters calculated from them.
- Based on the reference joint angles formed by the node points, body movement is generated by the forward dynamics model.
- Body movement evaluation by cost function comprises errors between the generated body movement and measurements from the IMUs and internal biomechanical loads.
- Repetition of steps 2 and 3 while adjusting the node points of the reference joint angles for cost function value minimization.
- GRF, GRM, and joint motion estimation using optimized node points in the forward dynamics model.
2.1. Forward Dynamics Model
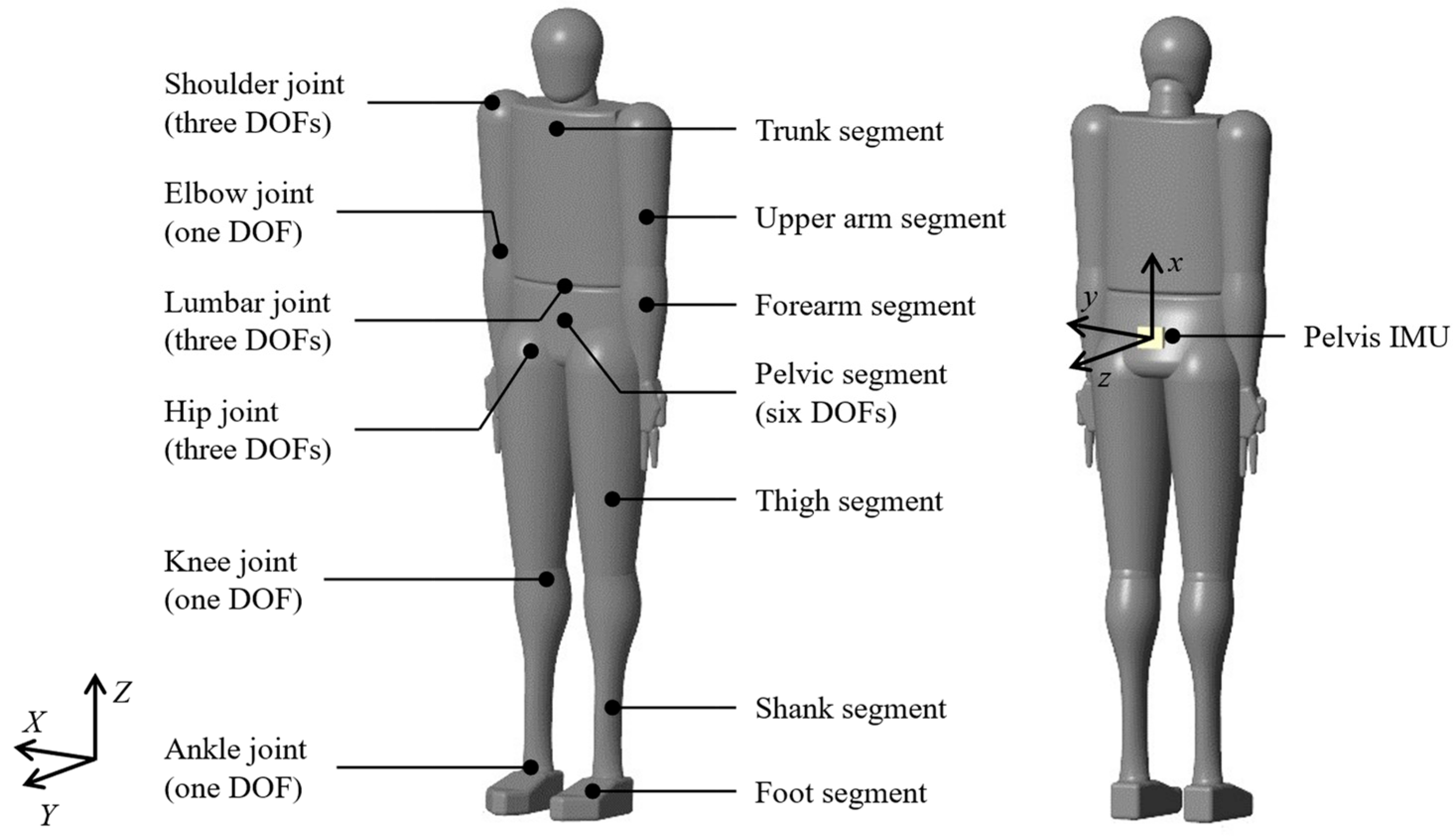
2.1.1. Human Model
2.1.2. Joint Torque Model
2.1.3. External Force Model
2.2. Optimization Calculation
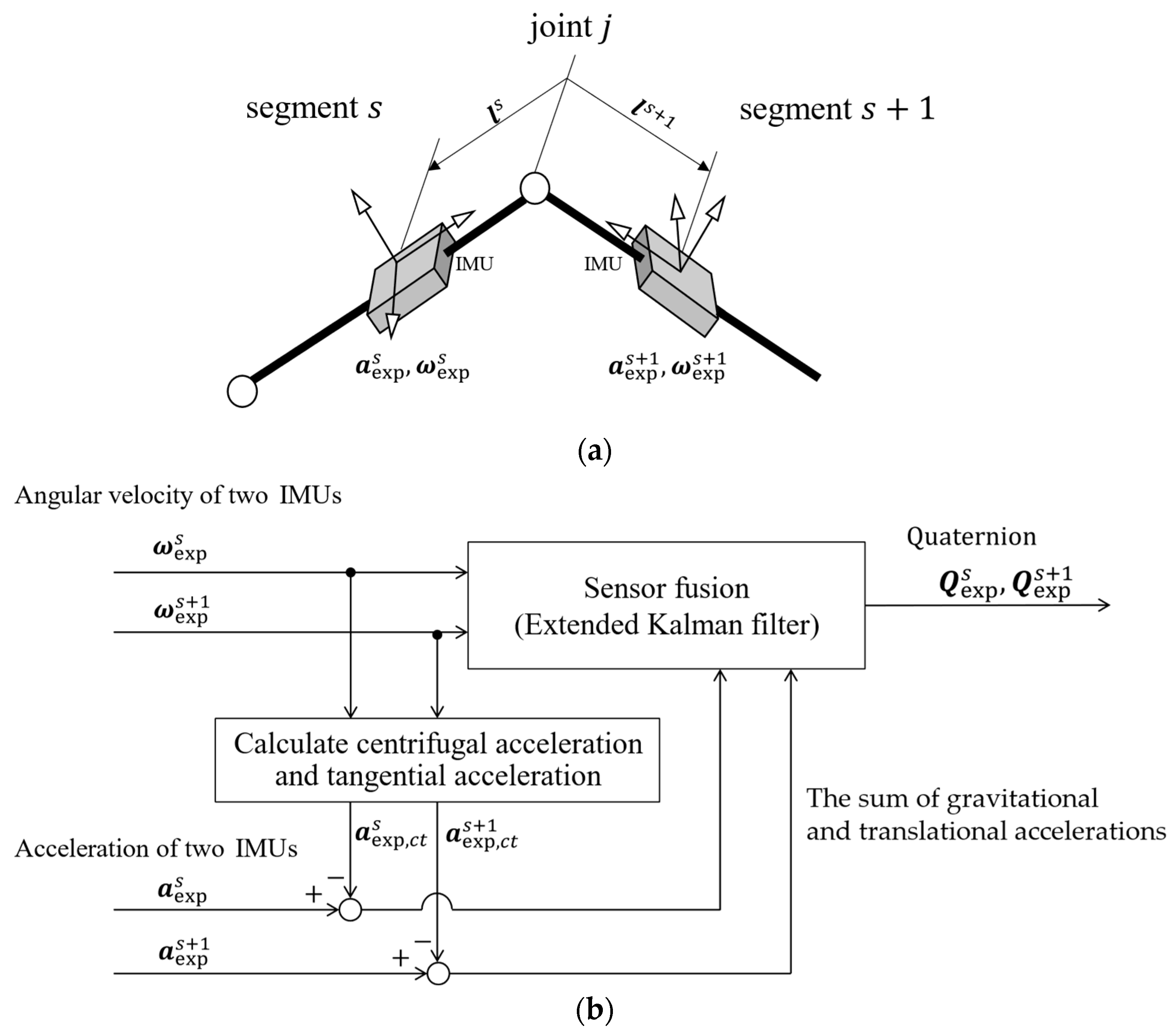
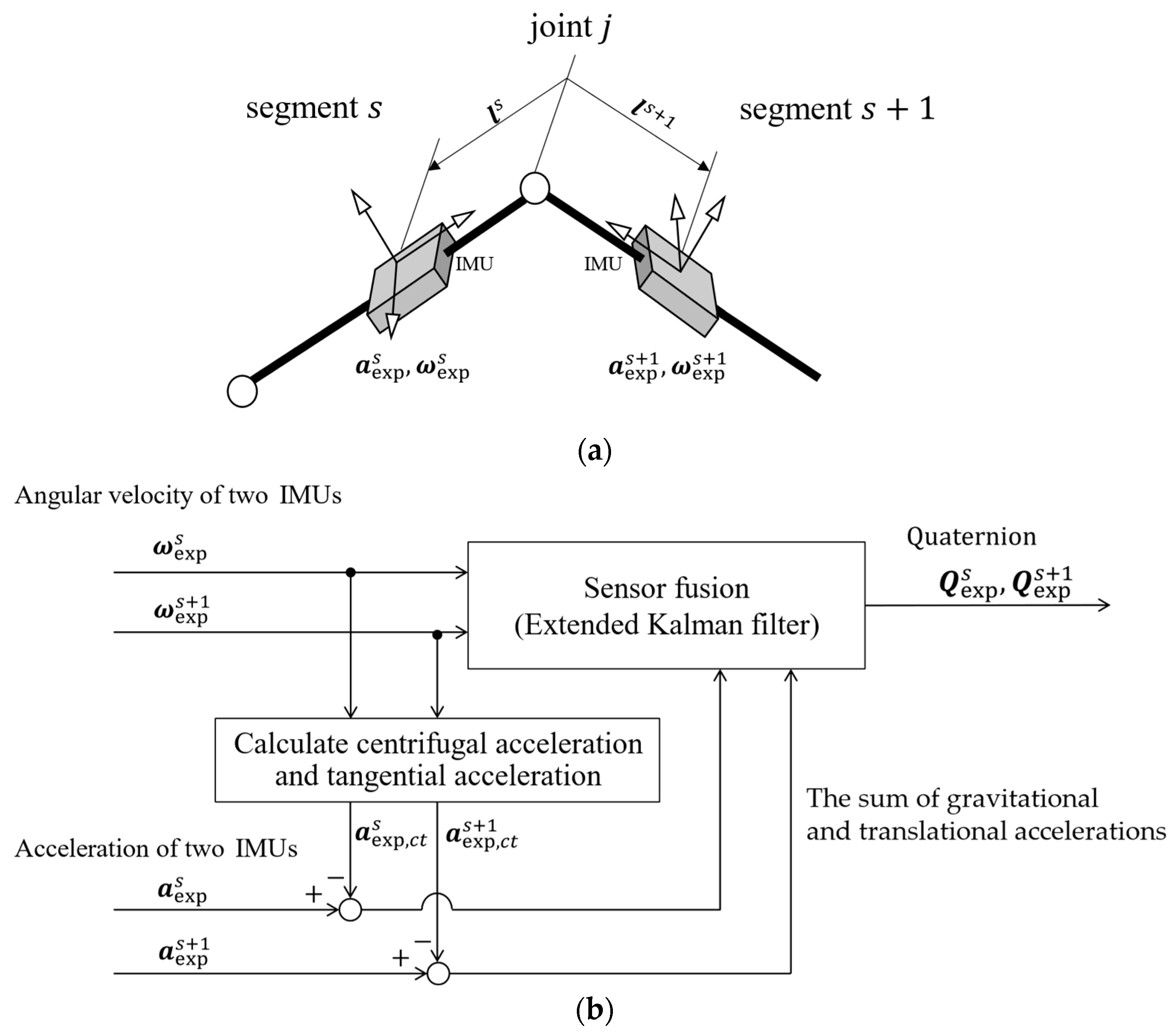
2.2.1. Orientation Estimation
3. Experiment
3.1. Participants
3.2. Conditions
3.3. Measurements
3.4. Data Analysis
4. Results
5. Discussion
5.1. Advantages of the Proposed Approach
5.2. Accuracy
5.3. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luhtanen, P.; Komi, P.V. Mechanical power and segmental contribution to force impulses in long jump take-off. Eur. J. Appl. Physiol. Occup. Physiol. 1979, 41, 267–274. [Google Scholar] [CrossRef]
- Barker, L.A.; Harry, J.R.; Mercer, J.A. Relationships between countermovement jump ground reaction forces and jump height, reactive strength index, and jump time. J. Strength Cond. Res. 2018, 32, 248–254. [Google Scholar] [CrossRef]
- Le Pellec, A.; Maton, B. Initiation of a vertical jump: The human body’s upward propulsion depends on control of forward equilibrium. Neurosci. Lett. 2002, 323, 183–186. [Google Scholar] [CrossRef]
- Glazier, P.S. Beyond animated skeletons: How can biomechanical feedback be used to enhance sports performance? J. Biomech. 2021, 129, 110686. [Google Scholar] [CrossRef]
- Bulat, M.; Can, N.K.; Arslan, Y.Z.; Herzog, W. Musculoskeletal simulation tools for understanding mechanisms of lower-limb sports injuries. Curr. Sports Med. Rep. 2019, 18, 210–216. [Google Scholar] [CrossRef]
- Xu, D.; Zhou, H.; Quan, W.; Gusztav, F.; Wang, M.; Baker, J.S.; Gu, Y. Accurately and effectively predict the ACL force: Utilizing biomechanical landing pattern before and after-fatigue. Comput. Methods Programs Biomed. 2023, 241, 107761. [Google Scholar] [CrossRef]
- Low, D.C.; Dixon, S.J. Footscan pressure insoles: Accuracy and reliability of force and pressure measurements in running. Gait Posture 2010, 32, 664–666. [Google Scholar] [CrossRef]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’ Flynn, B. Indirect measurement of ground reaction forces and moments by means of wearable inertial measurement units: A systematic review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef]
- Allen, T.; Shepherd, J.; Wood, J.; Tyler, D.; Duncan, O. Chapter 16—Wearables for disabled and extreme sports. In Digital Health; Academic Press: Cambridge, MA, USA, 2021; pp. 253–273. [Google Scholar] [CrossRef]
- Yamane, T.; Kimura, M.; Morita, M. Application of nine-axis accelerometer-based recognition of daily activities in clinical examination. Phys. Act. Health 2024, 8, 29–46. [Google Scholar] [CrossRef]
- Karatsidis, A.; Bellusci, G.; Schepers, H.M.; de Zee, M.; Andersen, M.S.; Veltink, P.H. Estimation of ground reaction forces and moments during gait using only inertial motion capture. Sensors 2016, 17, 75. [Google Scholar] [CrossRef] [PubMed]
- Chaaban, C.R.; Berry, N.T.; Armitano-Lago, C.; Kiefer, A.W.; Mazzoleni, M.J.; Padua, D.A. Combining inertial sensors and machine learning to predict vGRF and knee biomechanics during a double limb jump landing task. Sensors 2021, 21, 4383. [Google Scholar] [CrossRef]
- Karatsidis, A.; Jung, M.; Schepers, H.M.; Bellusci, G.; de Zee, M.; Veltink, P.H.; Andersen, M.S. Musculoskeletal model-based inverse dynamic analysis under ambulatory conditions using inertial motion capture. Med. Eng. Phys. 2019, 65, 68–77. [Google Scholar] [CrossRef]
- Haraguchi, N.; Hase, K. Prediction of ground reaction forces and moments and joint kinematics and kinetics by inertial measurement units using 3D forward dynamics model. J. Biomech. Sci. Eng. 2024, 19, 23–00130. [Google Scholar] [CrossRef]
- Drillis, R.; Contini, R.; Bluestein, M. Body segment parameter: A survey of measurement techniques. Artif. Limbs. 1964, 8, 44–66. [Google Scholar]
- Ae, M.; Tang, H.; Yokoi, T. Estimation of inertia properties of the body segments in Japanese athletes. Biomechanisms 1992, 11, 23–33. (In Japanese) [Google Scholar] [CrossRef]
- Davy, D.T.; Audu, M.L. A dynamic optimization technique for predicting muscle forces in the swing phase of gait. J. Biomech. 1987, 20, 187–201. [Google Scholar] [CrossRef]
- Engin, A.E. On the biomechanics of the shoulder complex. J. Biomech. 1980, 13, 575–581. [Google Scholar] [CrossRef]
- Engin, A.E.; Chen, S.M. Kinematics and passive resistive properties of human elbow complex. J. Biomech. Eng. 1987, 109, 318–323. [Google Scholar] [CrossRef] [PubMed]
- Pope, M.H.; Wilder, D.G.; Matteri, R.E.; Frymoyer, J.W. Experimental measurements of vertebral motion underload. Orthop. Clin. N. Am. 1977, 8, 155–167. [Google Scholar] [CrossRef]
- Ren, L.; Jones, R.K.; Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J. Biomech. 2008, 41, 2750–2759. [Google Scholar] [CrossRef] [PubMed]
- Seng, K.Y.; Lee Peter, V.S.; Lam, P.M. Neck muscle strength across the sagittal and coronal planes: An isometric study. Clin. Biomech. 2002, 17, 545–547. [Google Scholar] [CrossRef]
- Grabiner, M.D.; Jeziorowski, J.J.; Divekar, A.D. Isokinetic measurements of trunk extension and flexion performance collected with the biodex clinical data station. J. Orthop. Sports Phys. Ther. 1990, 11, 590–598. [Google Scholar] [CrossRef]
- Ng, J.K.-F.; Richardson, C.A.; Parnianpour, M.; Kippers, V. EMG activity of trunk muscles and torque output during isometric axial rotation exertion: A comparison between back pain patients and matched controls. J. Orthop. Res. 2002, 20, 112–121. [Google Scholar] [CrossRef]
- Lindsay, D.M.; Horton, J.F. Trunk rotation strength and endurance in healthy normal and elite male golfers with and without low back pain. N. Am. J. Sports Phys. Ther. 2006, 1, 80–89. [Google Scholar]
- Smith, J.C.; Darden, G.F. Peak torque comparison between Isam 9000 and biodex isokinetic devices. Int. J. Health Sci. 2016, 4, 7–13. [Google Scholar]
- Meeteren, J.v.; Roebroeck, M.E.; Stam, H.J. Test-retest reliability in isokinetic muscle strength measurements of the shoulder. J. Rehabil. Med. 2002, 34, 91–95. [Google Scholar] [CrossRef]
- Jenp, Y.N.; Malanga, G.A.; Growney, E.S.; An, K.N. Activation of the rotator cuff in generating isometric shoulder rotation torque. Am. J. Sports Med. 1996, 24, 477–485. [Google Scholar] [CrossRef]
- Lund, H.; Søndergaard, K.; Zachariassen, T.; Christensen, R.; Bülow, P.; Henriksen, M.; Bartels, E.M.; Danneskiold-Samsøe, B.; Bliddal, H. Learning effect of isokinetic measurements in healthy subjects, and reliability and comparability of biodex and lido dynamometers. Clin. Physiol. Funct. Imaging 2005, 25, 75–82. [Google Scholar] [CrossRef]
- Dean, J.C.; Kuo, A.D.; Alexander, N.B. Age-related changes in maximal hip strength and movement speed. J. Gerontol. A Biol. Sci. Med. Sci. 2004, 59, 286–292. [Google Scholar] [CrossRef] [PubMed]
- Sugimoto, D.; Mattacola, C.G.; Mullineaux, D.R.; Palmer, T.G.; Hewett, T.E. Comparison of isokinetic hip abduction and adduction peak torques and ratio between sexes. Clin. J. Sport Med. 2014, 24, 422–428. [Google Scholar] [CrossRef] [PubMed]
- Lindsay, D.M.; Maitland, M.E.; Lowe, R.C.; Kane, T.J. Comparison of isokinetic internal and external hip rotation torques using different testing positions. J. Orthop. Sports Phys. Ther. 1992, 16, 43–50. [Google Scholar] [CrossRef]
- Fugl-Meyer, A.R. Maximum isokinetic ankle plantar and dorsal flexion torques in trained subjects. Eur. J. Appl. Physiol. Occup. Physiol. 1981, 47, 393–404. [Google Scholar] [CrossRef]
- Jurman, D.; Jankovec, M.; Kamnik, R.; Topič, M. Calibration and data fusion solution for the miniature attitude and heading reference system. Sens Actuators A 2007, 138, 411–420. [Google Scholar] [CrossRef]
- Kondo, A.; Doki, H.; Hirose, K. A Study on the estimation method of 3D posture in body motion measurement using inertial sensors. Trans. Jpn. Soc. Mech. Eng. 2013, 79, 112–122. (In Japanese) [Google Scholar] [CrossRef]
- Simone, S.; Francesco, S.; Luca, F.; Alessandro, R. A sensor fusion algorithm for an integrated angular position estimation with inertial measurement units. In Design, Automation & Test in Europe Conference & Exhibition; IEEE: Grenoble, France, 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, X.; Sun, Y.; Tian, X.; Zhou, L.; Li, Y. A Double-EKF orientation estimator decoupling magnetometer efects on pitch and roll angles. IEEE Trans. Ind. Electron. 2022, 69, 2055–2066. [Google Scholar] [CrossRef]
- Rajagopal, A.; Dembia, C.L.; DeMers, M.S.; Delp, D.D.; Hicks, J.L.; Delp, S.L. Full body musculoskeletal model for muscledriven simulation of human gait. IEEE Trans. Biomed. Med. Eng. 2016, 63, 2068–2079. [Google Scholar] [CrossRef] [PubMed]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef]
- Seth, A.; Hicks, J.L.; Uchida, T.K.; Habib, A.; Dembia, C.L.; Dunne, J.J.; Ong, C.F.; DeMers, M.S.; Rajagopal, A.; Millard, M.; et al. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLoS Comp. Biol. 2018, 14, e1006223. [Google Scholar] [CrossRef] [PubMed]
- Taylor, R. Interpretation of the correlation coefficient: A basic review. J. Diagn. Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]
- Recinos, E.; Abella, J.; Riyaz, S.; Demircan, E. Real-time vertical ground reaction force estimation in a unified simulation framework using inertial measurement unit sensors. Robotics 2020, 9, 88. [Google Scholar] [CrossRef]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. In Xsens Motion Technologies BV Technical Report; Xsens Technologies: Enschede, The Netherlands, 2009; Volume 3. [Google Scholar]
- Nasr, A.; Hashemi, A.; McPhee, J. Model-based mid-level regulation for assist-as-needed hierarchical control of wearable robots: A computational study of human-robot adaptation. Robotics 2022, 11, 20. [Google Scholar] [CrossRef]
- Infantolino, B.W.; Forrester, S.E.; Pain, M.T.G.; Challis, J.H. The influence of model parameters on model validation. Comput. Methods Biomech. Biomed. Eng. 2019, 22, 997–1008. [Google Scholar] [CrossRef]
- Esmaeili, S.; Karami, H.; Baniasad, M.; Shojaeefard, M.; Farahmand, F. The association between motor modules and movement primitives of gait: A muscle and kinematic synergy study. J. Biomech. 2022, 134, 110997. [Google Scholar] [CrossRef]
- Hara, Y.; Hase, K.; Haraguchi, N.; Koshio, T.; Takahashi, T. A Validation Method for Estimating the Reaction Force from the Ice Surface during Figure Skating Jump Movements. In Proceedings of the 12th Asian-Pacific Conference on Biomechanics, Kuala Lumpur, Malaysia, 15–18 November 2023. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hip | Knee | Ankle | ||||
|---|---|---|---|---|---|---|
| Flexion | Abduction | External Rotation | Flexion | Flexion | ||
| Joint angle | 0.682 | −0.291 | −0.818 | 0.781 | 0.723 | |
| Joint torque | 0.203 | −0.510 | 0.285 | 0.376 | 0.313 | |
| RMSE | ||||||
| Joint angle | 20.1 | 15.9 | 15.9 | 15.6 | 12.3 | |
| Joint torque | () | 13.7 | 10.1 | 3.39 | 12.2 | 4.67 |
| rRMSE | ||||||
| Joint angle | 56.4 | 73.7 | 67.5 | 43.3 | 38.6 | |
| Joint torque | 55.0 | 55.1 | 66.0 | 42.1 | 59.5 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koshio, T.; Haraguchi, N.; Takahashi, T.; Hara, Y.; Hase, K. Estimation of Ground Reaction Forces during Sports Movements by Sensor Fusion from Inertial Measurement Units with 3D Forward Dynamics Model. Sensors 2024, 24, 2706. https://doi.org/10.3390/s24092706
Koshio T, Haraguchi N, Takahashi T, Hara Y, Hase K. Estimation of Ground Reaction Forces during Sports Movements by Sensor Fusion from Inertial Measurement Units with 3D Forward Dynamics Model. Sensors. 2024; 24(9):2706. https://doi.org/10.3390/s24092706
Chicago/Turabian StyleKoshio, Tatsuki, Naoto Haraguchi, Takayoshi Takahashi, Yuse Hara, and Kazunori Hase. 2024. "Estimation of Ground Reaction Forces during Sports Movements by Sensor Fusion from Inertial Measurement Units with 3D Forward Dynamics Model" Sensors 24, no. 9: 2706. https://doi.org/10.3390/s24092706