Novel Deployment Schemes for Mobile Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analysis of Deficiencies of Virtual Force Algorithm
2.1. Problem Description
2.2. Virtual Force Algorithm
2.3. Analysis of Virtual Force Algorithm
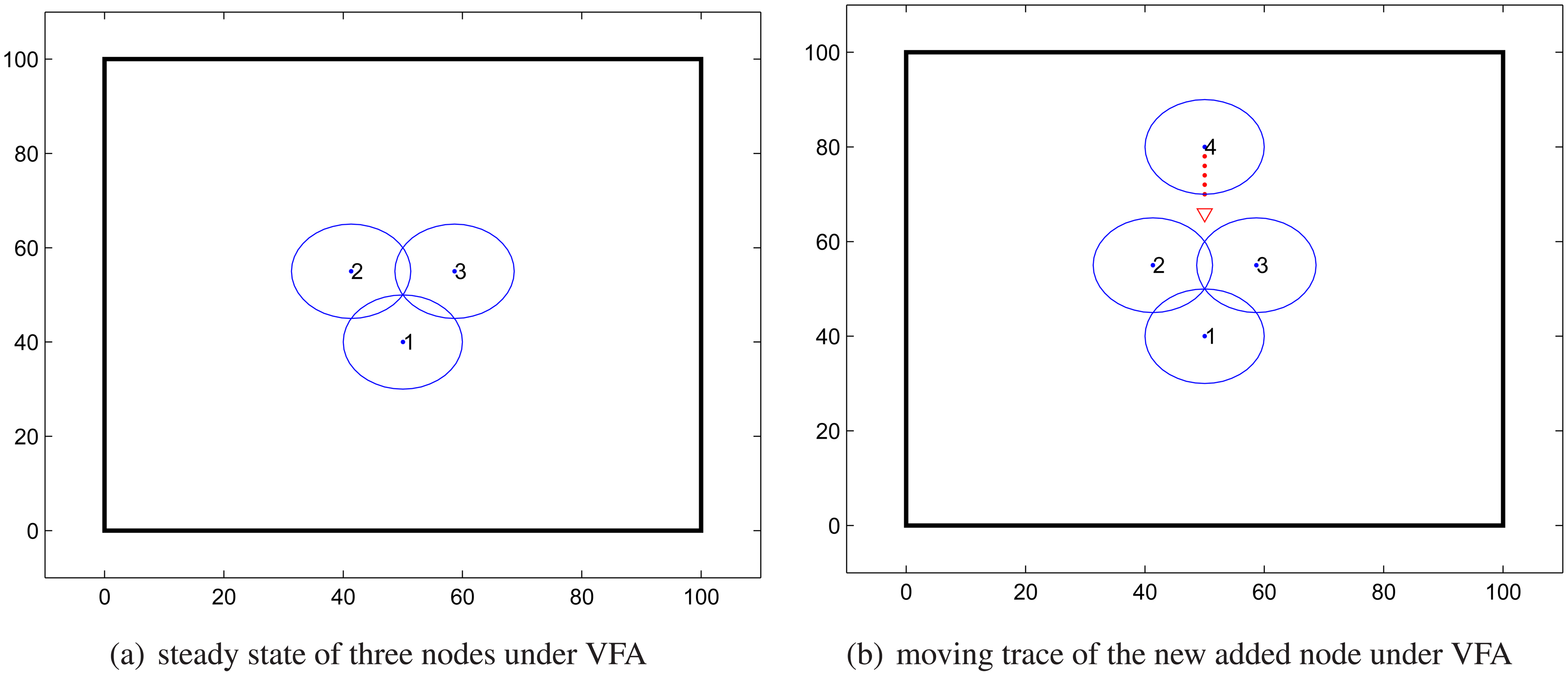
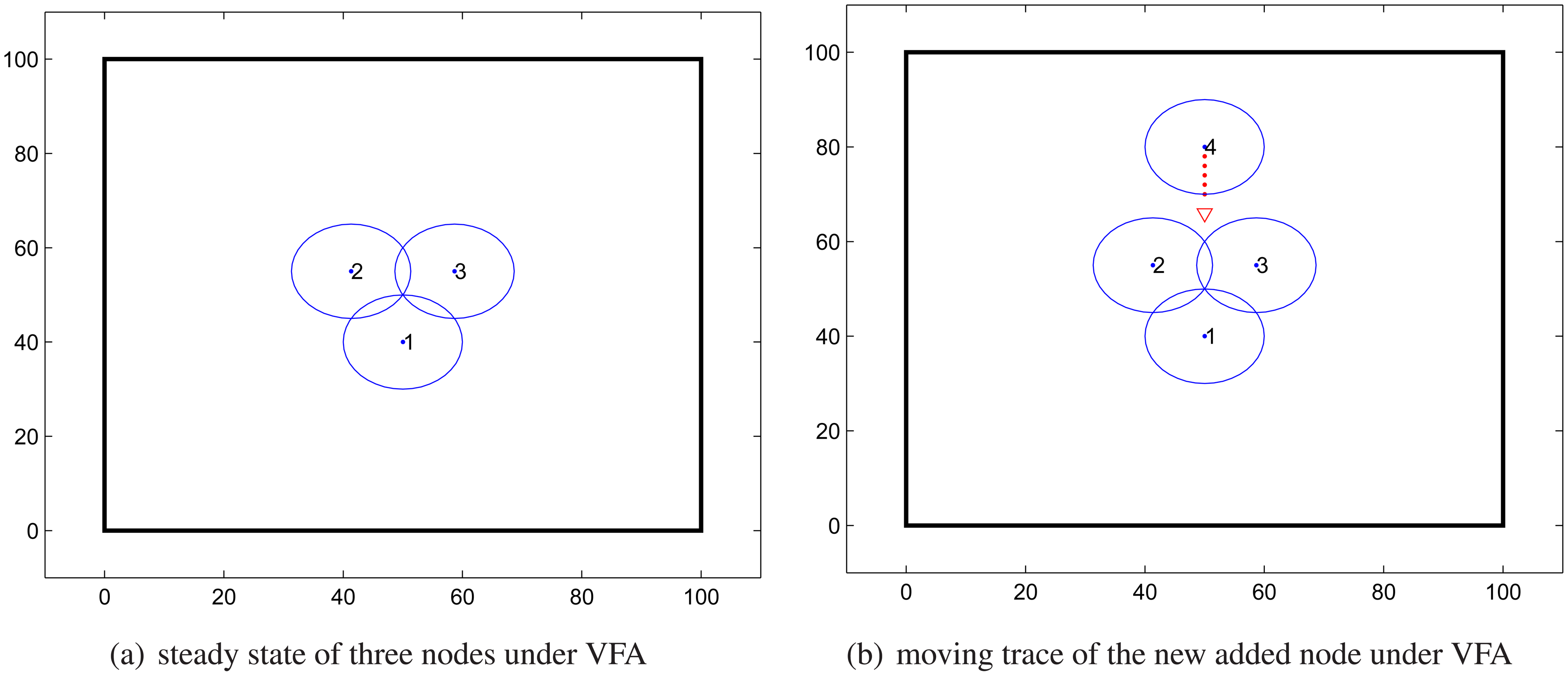
- VFA cannot always guarantee that the distance between sensors is reached at threshold Dth;As shown in Figure 1(a), assuming sensor nodes S1, S2, S3 are located on the vertices of an equilateral triangle, when optimized coverage of ROI is achieved by using VFA. Zhang has demonstrated in [18] that in this case it ensures that not only ROI is fully covered, but also the overlap between sensing regions is minimized. When Node S4 enters the region, as shown in Figure 1(b), S4 moves towards S1, S2, and S3 under VFA. When nodes S2, S3, S4 construct an equilateral triangle, there still exist attractive force between S1 and S4 according to Equation (1). Thus S1 and S4 will continue to move towards each other under the attractive force and consequently fail to keep a force balance in the origin WSNs. In other words, none of the two nodes will stabilize at a desired threshold distance Dth.In fact, both Figure 1(a) and Figure 1(b) reveal that for the given ROI, the movement of S4 cannot increase the coverage ratio. On the contrary, it reduces the coverage rate to some extent. This kind of movement will not only consume the node's energy but make the coverage rate decrease, and thus is a useless move.
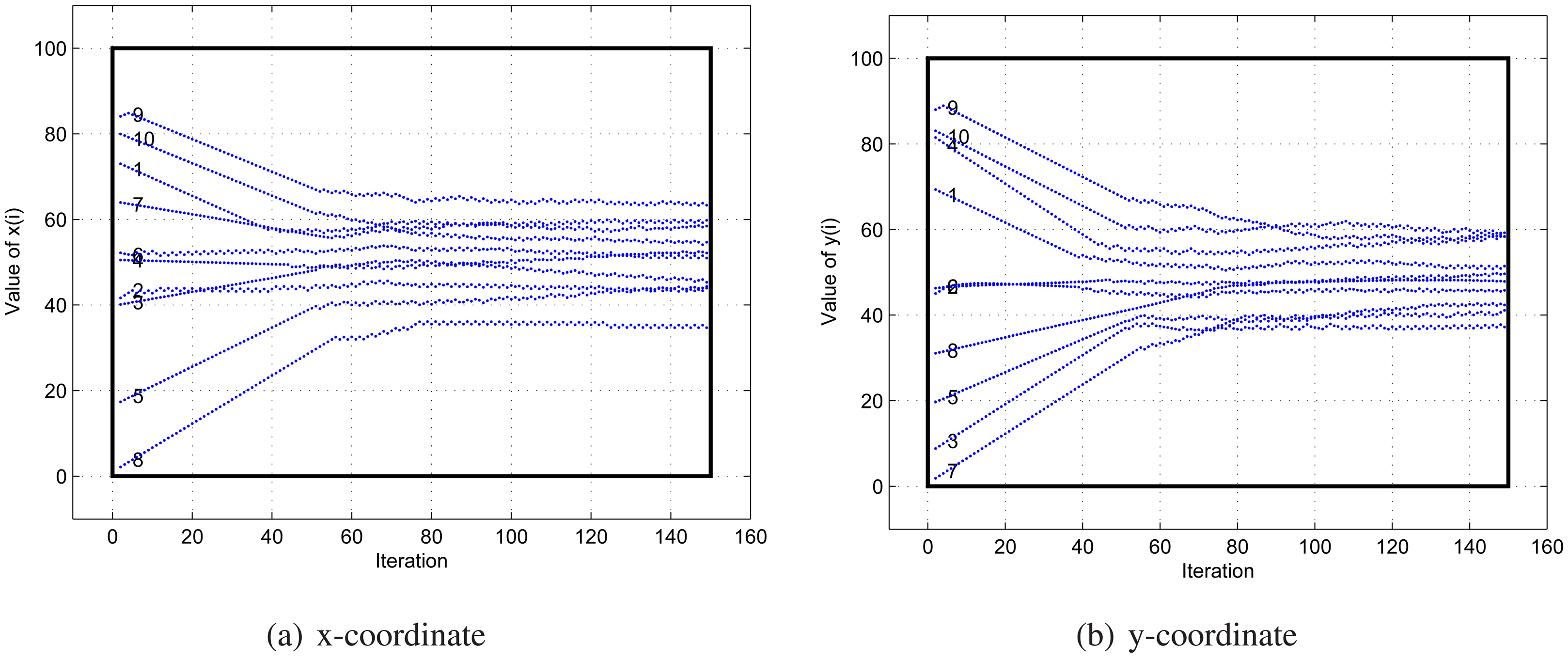
- VFA cannot converge to a steady state fastly;For a relatively large scale WSNs, the virtual force relationship given by equation (1) will neither make any two nodes stable at the desired threshold nor make the algorithm converged. Figure 2(a) and Figure 2(b) respectively show the changes of x and y coordinates of sensor nodes under VFA for the WSN with n = 10. It is easy to find that the nodes are not stable and their coordinates are varying all the time, being in an oscillating state.Therefore it is necessary to confine the virtual force between sensor nodes into an effective distance, so that no force is exerted when the distance exceed a certain range, which will facilitate sensor deployment in a fast and stable way. Also when a force effective distance is given in a coverage problem, useless moves are reduced and sensor energy is saved so that the coverage ratio of ROI in the whole networks is increased to some extent.
3. Novel Deployment Schemes for Mobile Sensor Networks
3.1. Improved VFA: IVFA
3.2. Exponential VFA: EVFA
3.3. Performance Evaluation
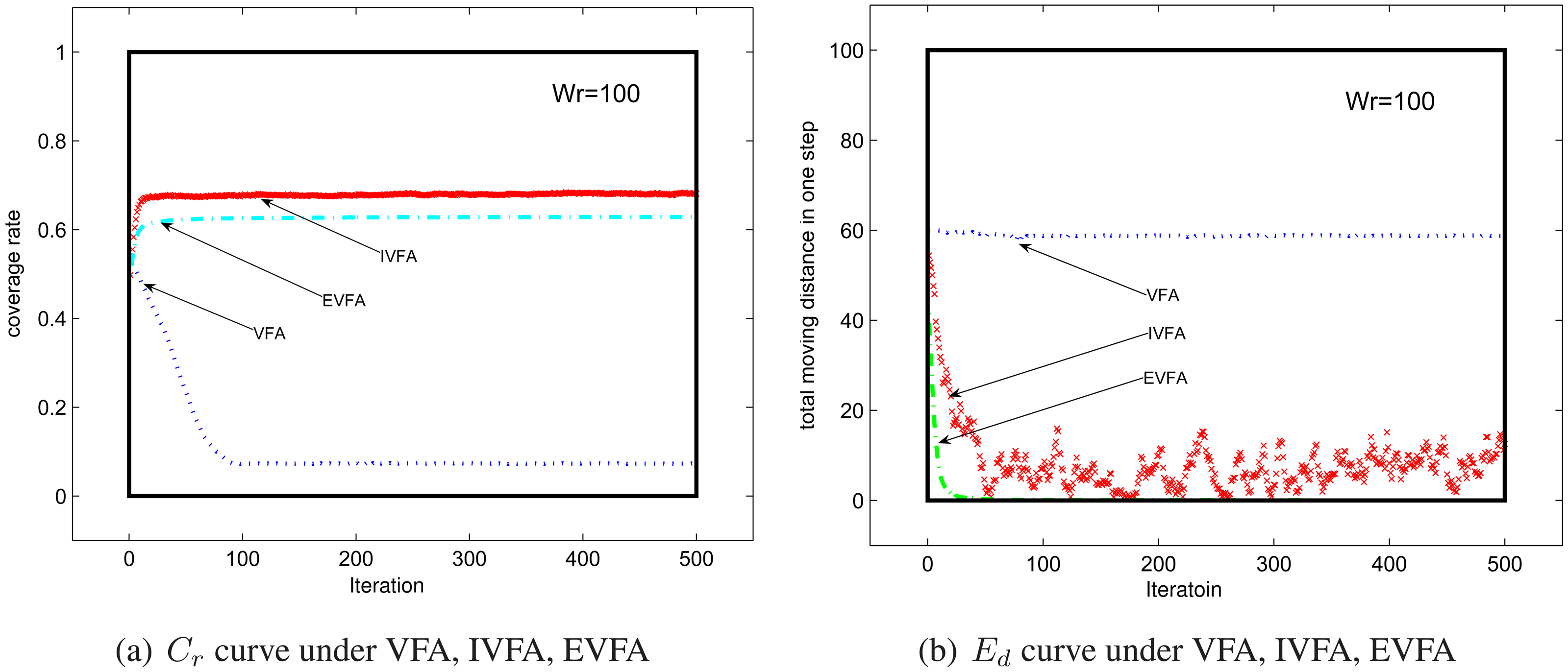
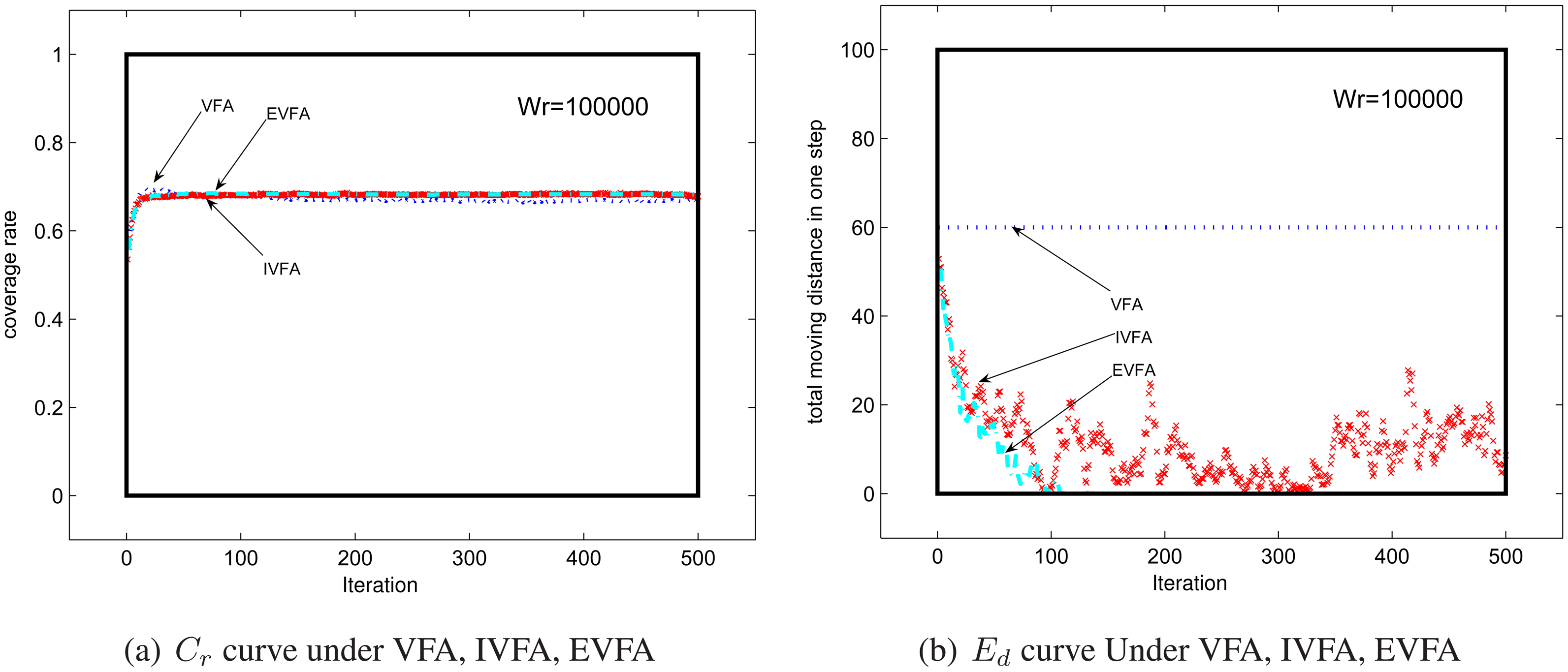
3.3.1. Coverage Rate
3.3.2. Moving Energy Consumption
3.3.3. Convergence of Deployment Scheme
4. Simulation Results and Performance Evaluation
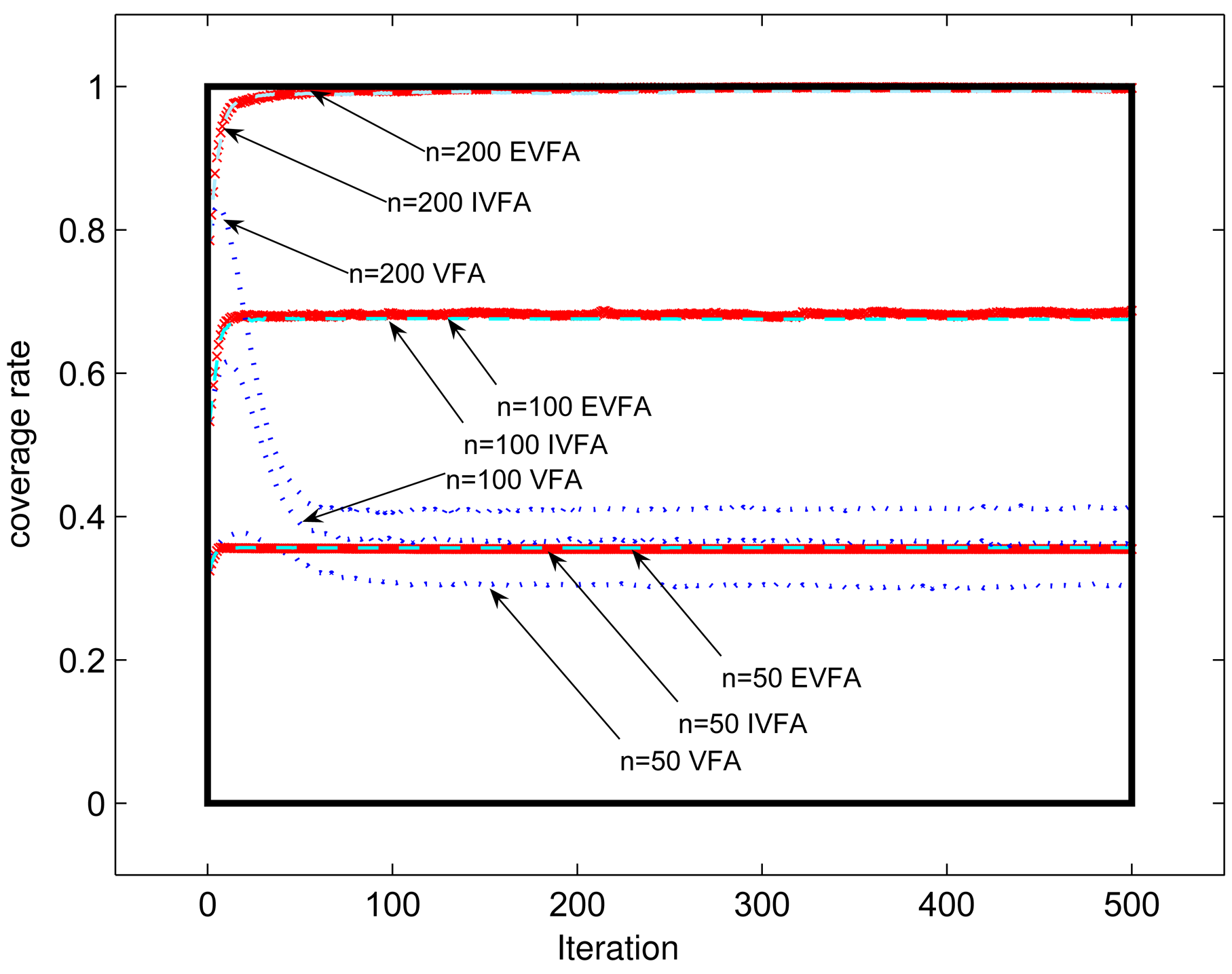
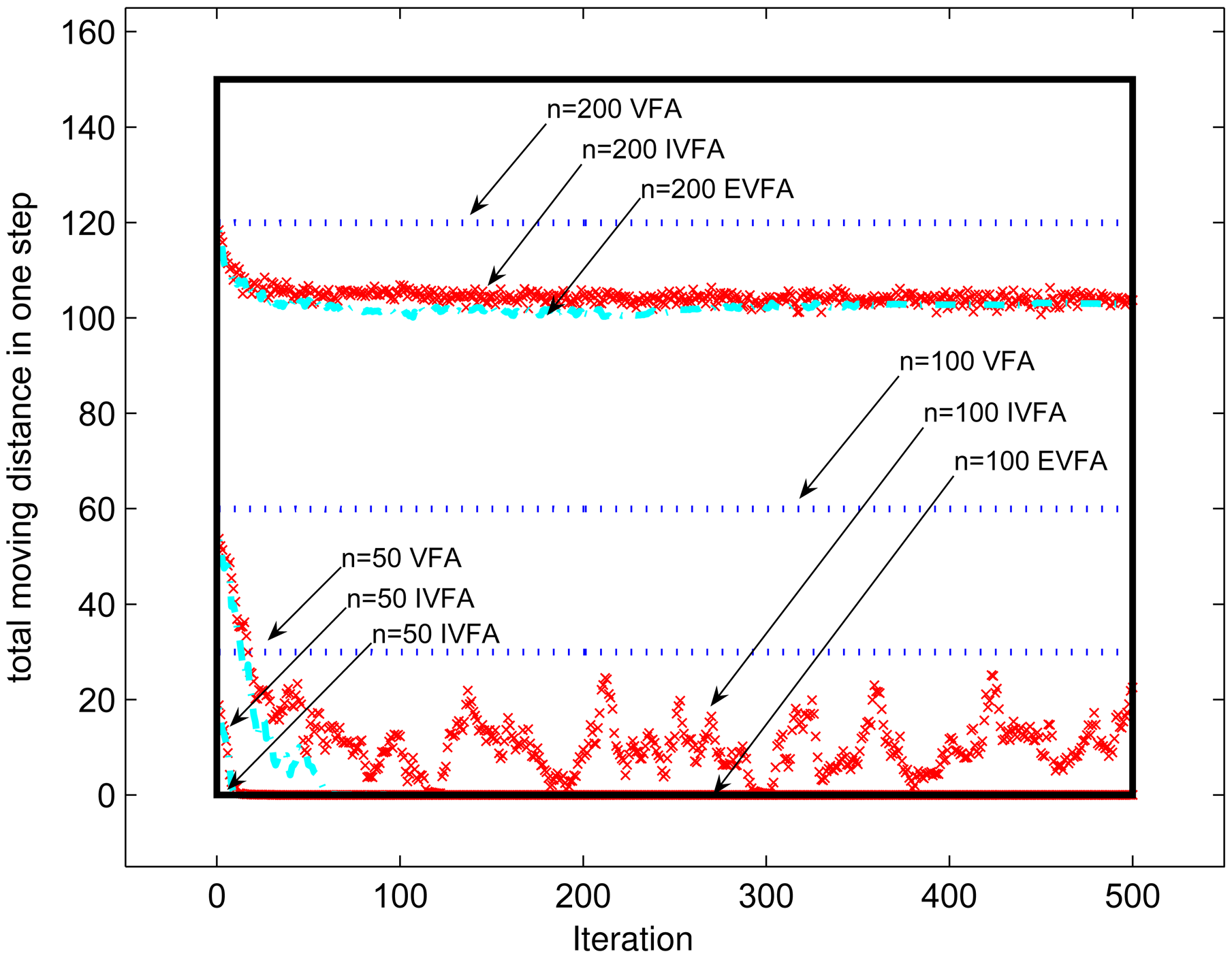
4.1. Impact of Mobile Sensor Nodes's Number
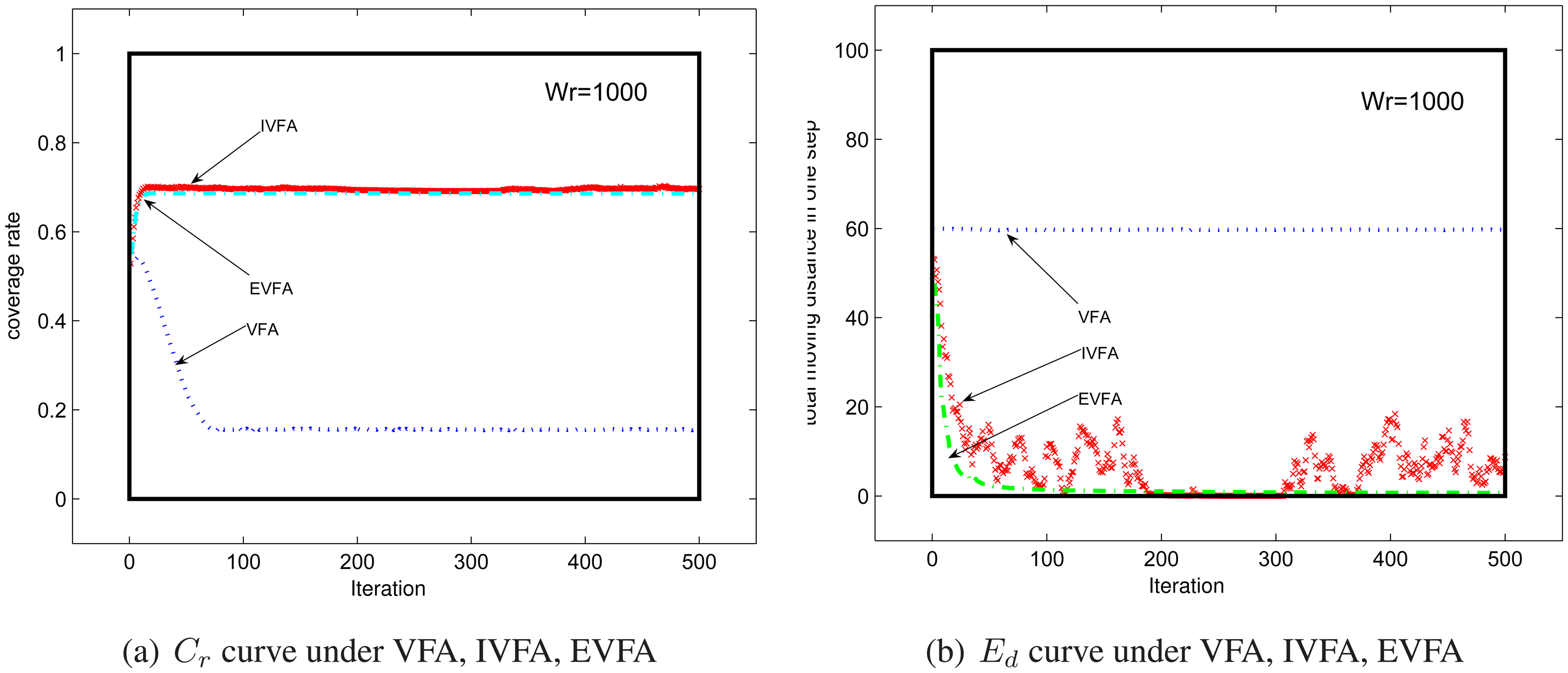
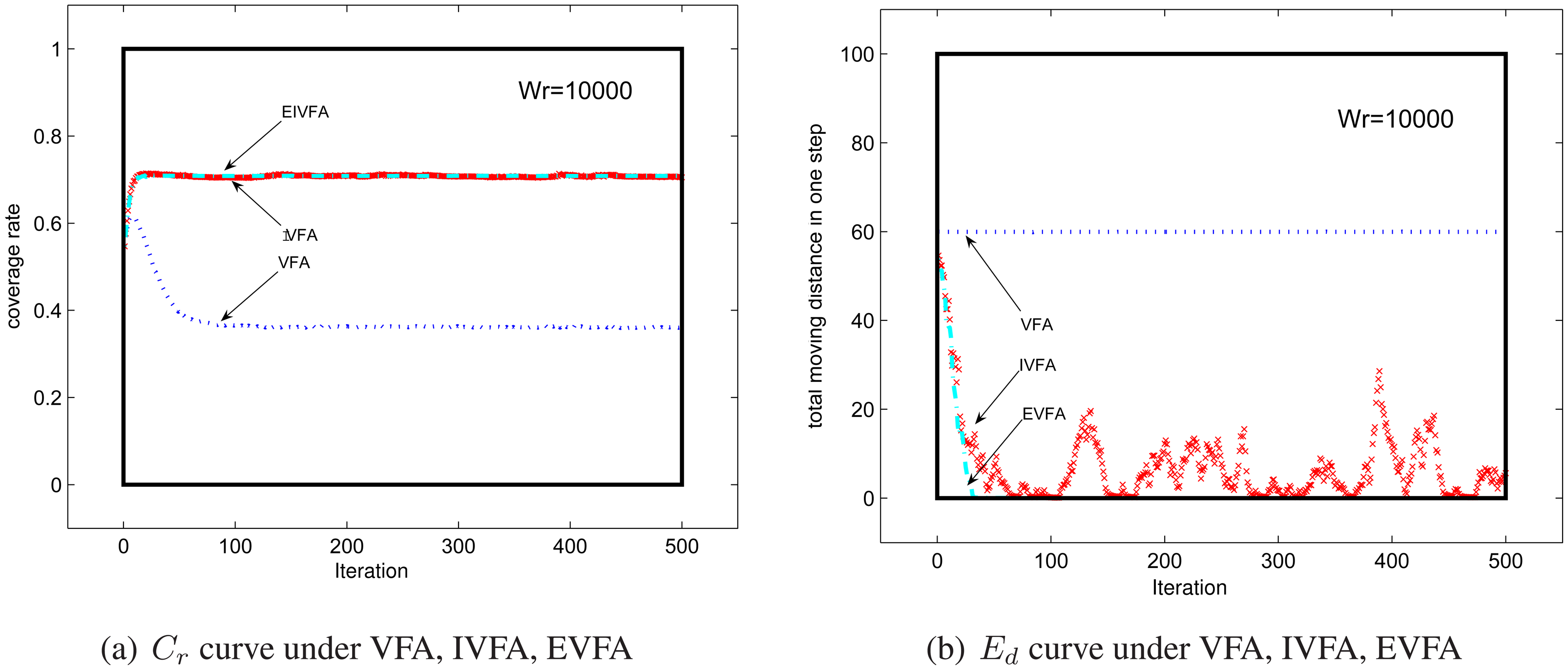
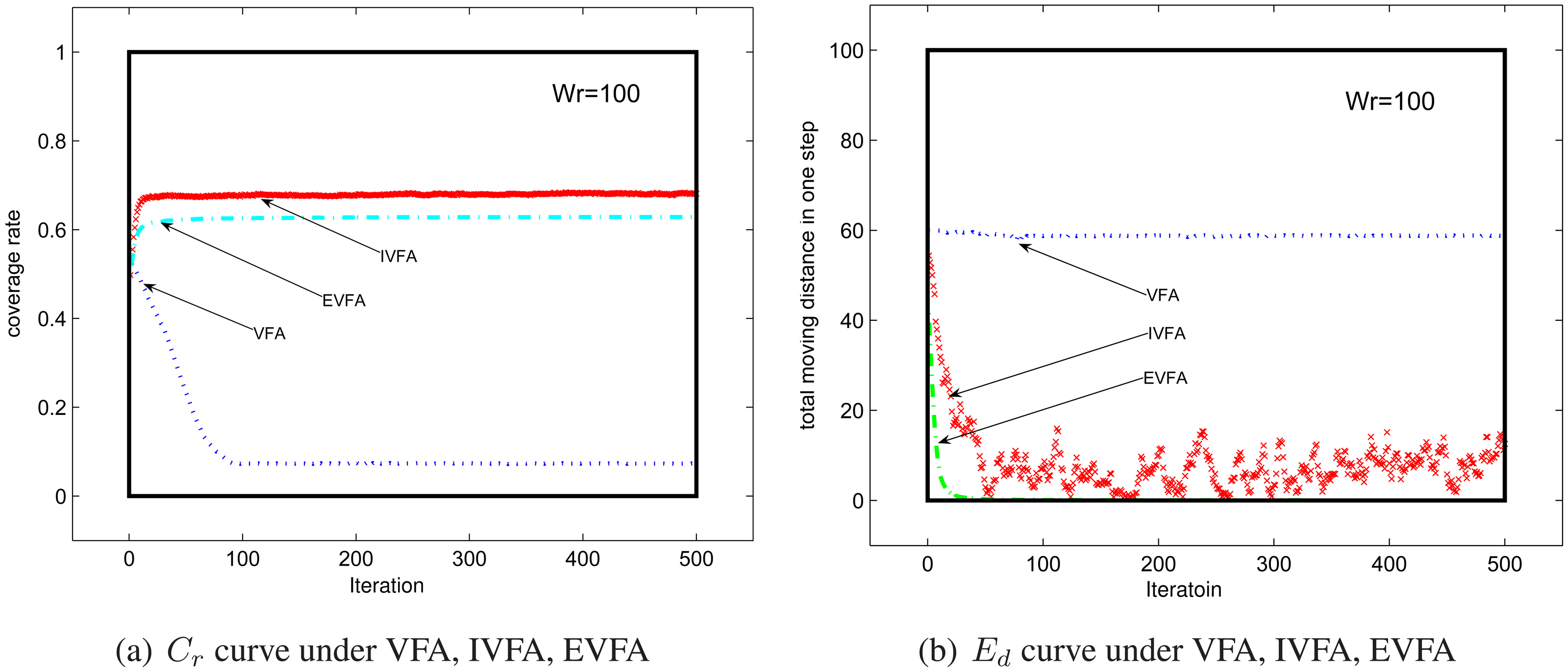
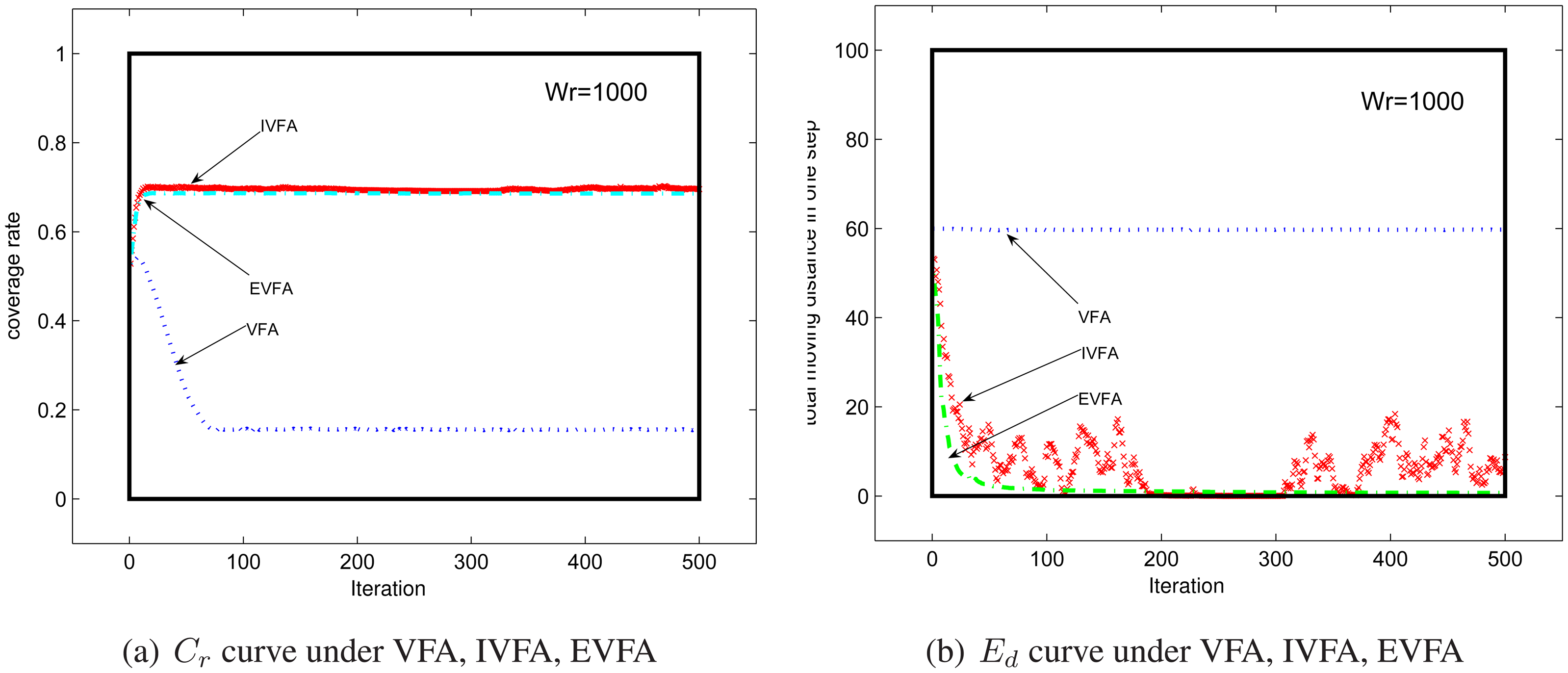
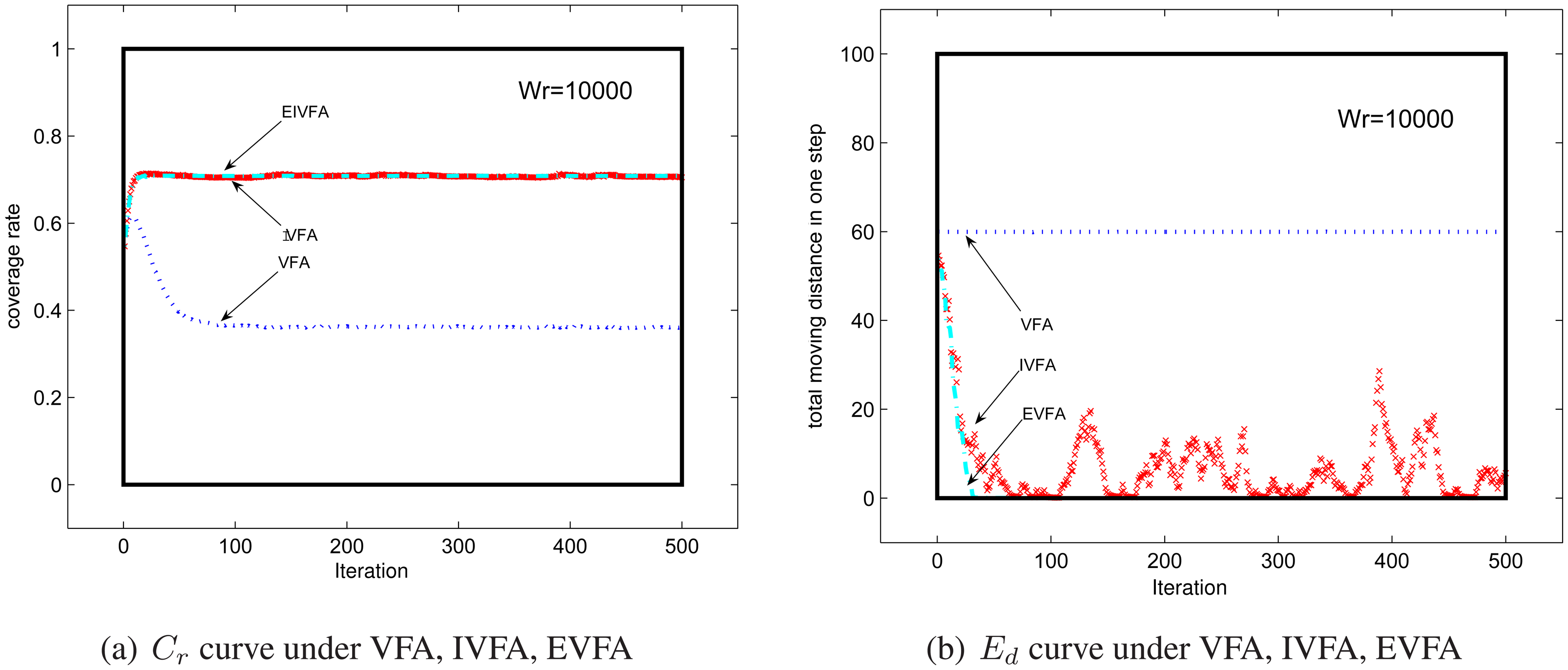
4.2. Virtual Force Coefficient's influence on performance
5. Conclusions
Acknowledgments
References
- Goodman, J.; Reuther, A.; et al. Next generation technologies to enable sensor network. In Handbook of Sensor Networks: Compact Wireless and Wired Sensing Systems; Mohammad, I.M., Ed.; CRC Press, 2004. [Google Scholar]
- Sun, L.; Li, J.; et al. Wireless sensor networks (in Chinese); Beijing; Tsinghua University Press, 2005. [Google Scholar]
- Mainwaring, A.; Polastre, J.; et al. Wireless sensor networks for habitat monitoring. Proceedings of ACM International Workshop on Wireless Sensor Networks and Applications 2002, 88–97. [Google Scholar]
- Chatzigiannakis, I.; Mylonas, G.; Nikoletseas, S. jwebdust: A java-based generic application environment for wireless sensor networks. In Proceedings of the IEEE International Conference on Distributed Computing in Sensor Networks (DCOSS), Lecture Notes in Computer Science (LNCS); Springer Verlag, 2005; pp. 376–386. [Google Scholar]
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: a survey. Computer Networks 2002, 38(4), 393–422. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Cluster-based dynamic energy management for collaborative target tracking in wireless sensor networks. Sensors 2007, 7, 1193–1215. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Distributed particle swarm optimization and simulated annealing for energy-efficient coverage in wireless sensor networks. Sensors 2007, 7, 628–648. [Google Scholar]
- Ren, Y.; Zhang, S.; Zhang, H. Theories and algorithms of coverage control for wireless sensor networks. Journal of Software 2006, 17(3), 422–433. [Google Scholar]
- Cardei, M.; Wu, J. Coverage in wireless sensor networks. In Handbook of Sensor Networks; Ilyas, M., Magboub, I., Eds.; CRC Presss, 2004. [Google Scholar]
- Li, X.; Wan, P.; Ophir, F. Coverage in wireless ad hoc sensor networks. IEEE Transactions on Computers 2003, 52(6), 753–763. [Google Scholar]
- Heo, N.; Varshney, P. An intelligent deployment and clustering algorithm for a distributed mobile sensor network. Proceedings of IEEE International Conference on Systems, Man and Cybernetics 2003, 4576–4581. [Google Scholar]
- Meguerdichian, S.; Koushanfar, F.; Potkonjak, M.; Srivastava, M. Coverage problems in wireless ad-hoc sensor networks. Proceedings of IEEE INFOCOM 2001, 1380–1387. [Google Scholar]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization based on virtual forces. Proceedings of IEEE INFOCOM 2003, 1293–1303. [Google Scholar]
- Clouqueur, T.; Phipatanasuphorn, V.; Ramanathan, P.; Saluja, K. Sensor deployment strategy for detection of targets traversing a region. Mobile Networks and Applications 2003, 8(4), 453–461. [Google Scholar]
- Chakrabarty, K.; Iyengar, S.; Qi, H.; Eungchun, C. Grid coverage for surveillance and target location in distributed sensor networks. IEEE Transactions on Computers 2002, 51(12), 1448–1453. [Google Scholar]
- Howard, A.; Mataric, M. Mobile sensor network deployment using potential fields: a distributed, scalable solution to the area coverage problem. In Proceedings of the 6th International Symposium on Distributed Autonomous Robotics Systems; Fukuoka, Japan, 2002. [Google Scholar]
- Popa, D.; Stephanou, H.; et al. Robotic deployment of sensor networks using potential fields. Proceedings of IEEE International Conference on Robotics and Automation 2004, 642–647. [Google Scholar]
- Zhang, H.; Hou, J. Maintaining sensing coverage and connectivity in large sensor networks. Wireless Ad Hoc and Sensor Networks 2005, 1(1-2), 89–123. [Google Scholar]
- Gage, D. Command control for many-robot systems. Proceeding of the 19th Annual AUVS Technical Symposium 1992, 22–24. [Google Scholar]
- Shen, X.; Chen, J. Grid scan: A simple and effective approach for coverage problem in wireless sensor networks. In Proceedings of IEEE ICC; Istanbul, Turkey, 2006. [Google Scholar]
- Doolin, D.; Sitar, N. Wireless sensors for wildfire monitoring. In Proceedings of SPIE on Smart Structures & Materials; 2005; pp. 477–484. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. International Journal of Robotics Research 1986, 5(1), 90–983. [Google Scholar]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization in distributed sensor networks. ACM Transactions on Embedded Computing Systems 2004, 3(1), 61–91. [Google Scholar]
- Li, S. Target tracking oriented self-organizing sensor networks. PhD thesis, Zhejiang University, Hangzhou, 2006. in Chinese with English abstract.. [Google Scholar]
© 2007 by MDPI
Share and Cite
Chen, J.; Li, S.; Sun, Y. Novel Deployment Schemes for Mobile Sensor Networks. Sensors 2007, 7, 2907-2919. https://doi.org/10.3390/S7112907
Chen J, Li S, Sun Y. Novel Deployment Schemes for Mobile Sensor Networks. Sensors. 2007; 7(11):2907-2919. https://doi.org/10.3390/S7112907
Chicago/Turabian StyleChen, Jiming, Shijian Li, and Youxian Sun. 2007. "Novel Deployment Schemes for Mobile Sensor Networks" Sensors 7, no. 11: 2907-2919. https://doi.org/10.3390/S7112907
APA StyleChen, J., Li, S., & Sun, Y. (2007). Novel Deployment Schemes for Mobile Sensor Networks. Sensors, 7(11), 2907-2919. https://doi.org/10.3390/S7112907