1. Introduction
Many researches have been initiated to design and manufacture sensors capable to detect and measure the presence of specific molecules in liquids for biological applications. Indeed, adsorption of proteins onto inorganic substrates is an important issue yielding numerous developments in medicine and biotechnology [
1-
2]. The strong demand for the development of lab-on-chip analysis devices has pushed to investigate many different approaches in that purpose. Among these, the use of surface acoustic waves (SAW) has received a particular interest during the last decade. Specially, the use of pure shear guided waves in stratified substrates such as amorphous silica on quartz allowing for Love wave excitation appears as an attractive solution to fabricate devices able to operate in water. Since shear waves are not radiated in fluids and because of their noticeable sensitivity to gravimetric effects related to surface adsorption [
3-
4], they actually are considered as one of the best solutions for such applications. Many devices based on delay line configurations have been built and tested with various successes. However, the use of resonators instead of delay lines is expected to provide better sensing capabilities [
5-
7] particularly when monitoring frequency shifts due to gravimetric effects. For instance, accurate measurements of molecule concentration are expected by monitoring the resonance frequency of two-port synchronous resonators immersed in fluids. This approach did not received too much interest, but we can mention for instance the work by Nomura et al. who developed a liquid flow system dedicated to de-ionized water conductivity measurements [
8].
In this paper, the development of a bio-chemical sensor based on Love wave resonators is reported. This device has been designed to detect protein adsorption at the surface of the resonators' cavity by monitoring their resonance frequency. It consists in two port synchronous resonators in contact with aqueous media, placed in an oscillator loop operating near 200 MHz. The acoustic waves are launched and detected using interdigital transducers (IDTs). Love-wave resonators exhibiting quality factors Q in excess of 2000 have been used for sensing the chemical properties of liquids using surface adsorption phenomena. To minimize the wave damping due to acoustic radiation in the fluid domain, a specific grating structure has been designed, increasing the robustness of the Love wave device to the viscosity of the liquid to be tested. We also have developed a liquid cell fabricated using the SU-8™ photo-resist, preventing the presence of liquid on the transducers. Results under controlled water flow show the efficiency of the proposed approach, allowing for the detection of biomolecules such as proteins in liquids. To illustrate the interest of the proposed development, adsorption of bovine serum albumin (BSA) has been monitored using our sensor, allowing for a first qualitative analysis of the reaction kinetic.
2. Theory and mass sensitivity measurements
The basic principle exploited for this work consists in using Surfaces Transverse Waves (STW) resonators built on (YXlt)/36°/90° cut of quartz (the so-called (AT,Z) cut) coated with a silica layer [
9-
11]. This material combination is particularly well-suited for the excitation and guiding of Love waves since pure shear waves propagate in amorphous silica with a phase velocity much lower (3370 m.s
-1) than the one of STW on (AT,Z) cut (5100 m.s
-1). Many developments have been presented to characterize Love wave properties on such configurations [
9-
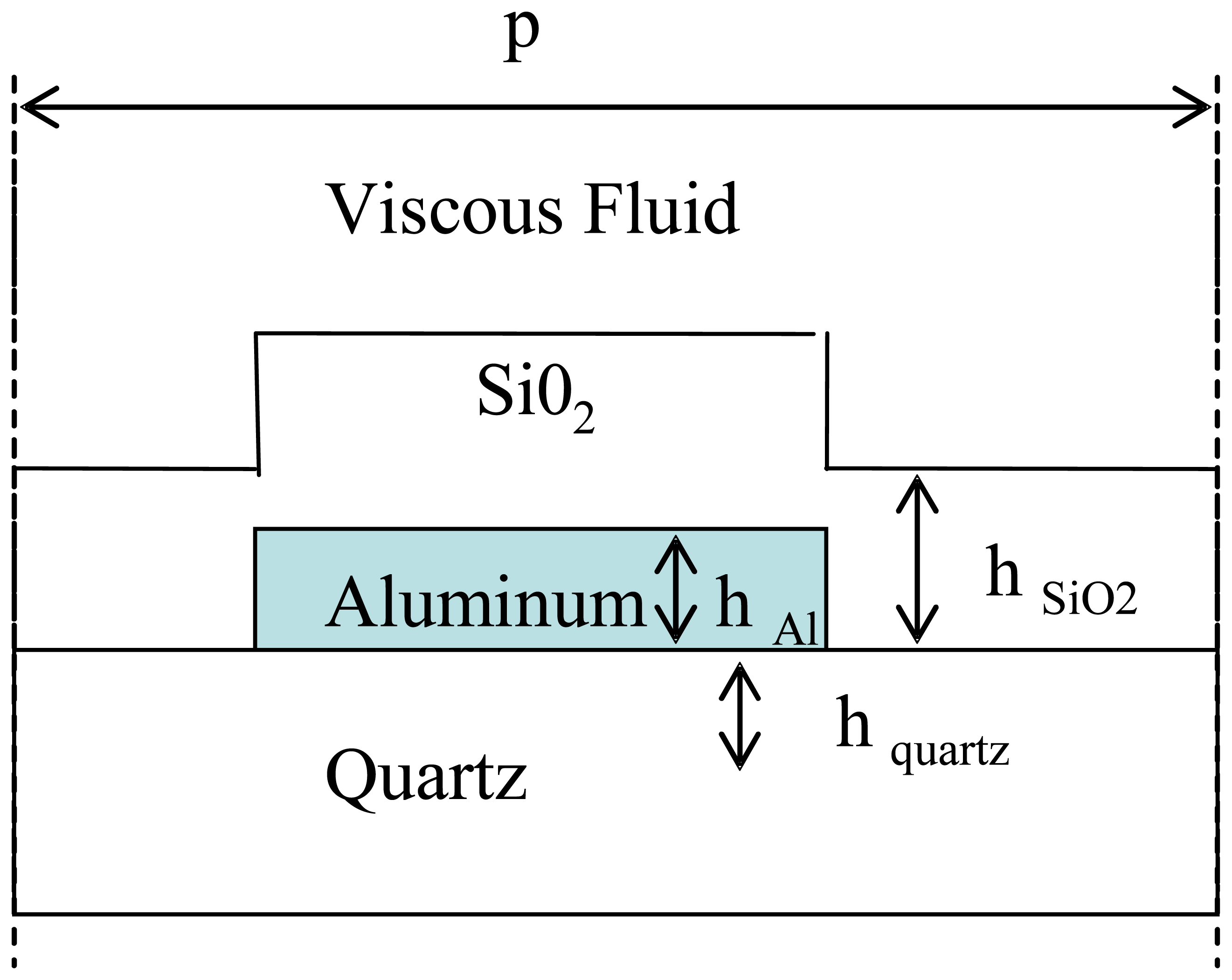
12]. However, the simulation of Love wave excitation and detection by inter-digital transducers is quite complicated because of the inhomogeneous nature of the problem (
figure 1), then requiring the use of advanced models based on finite element analysis and boundary element methods [
13].
Furthermore, Love wave devices are generally assumed unperturbed when they are in contact with non viscous water. In the real case, damping effects occur due to viscosity which significantly reduces Love wave device dynamics. A model has been developed to address this problem [
14-
16]. It has been shown that the deposition of thick SiO
2 layers onto (AT,Z) cut significantly modifies the acousto-electric properties of surface guided shear waves [
5,
13]. Moreover, since SiO
2 deposition is conformal (i.e., the corrugation of surface due to the presence of the periodic electrode grating is preserved after the silica deposition), a quite large frequency stop band is predicted and observed [
11-
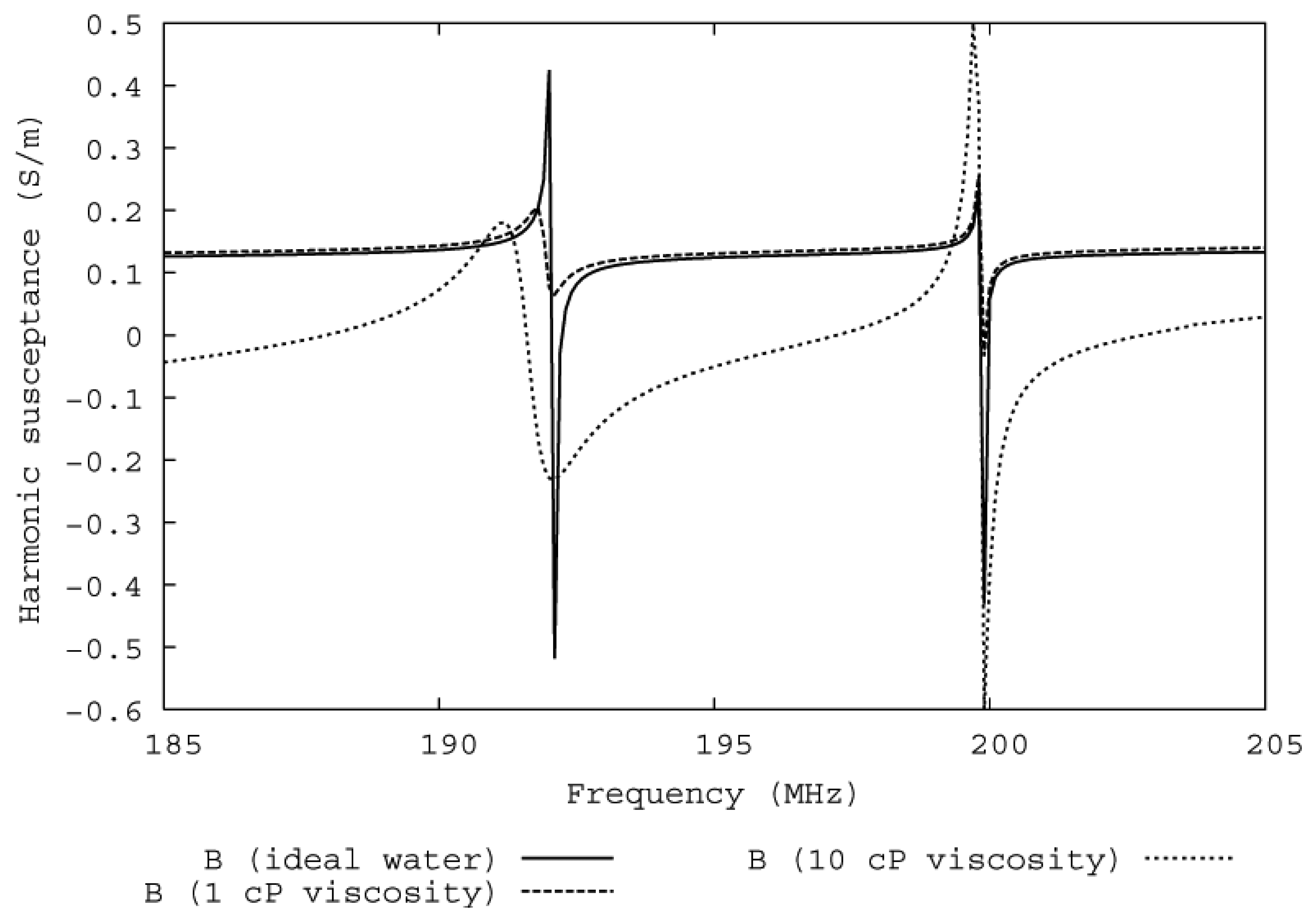
12]. We have simulated the influence of viscous water on Love wave propagating under an infinite periodic grating, pointing out significant differences between resonances at the beginning and at the end of the stop band. We have observed that the resonance at the end of the stop band actually exhibits a better resistance to viscous effects than the first resonance of the device (beginning of the stop band). Taking advantage of such a phenomenon allows us to improve the signal dynamics of the device in contact with viscous fluids, according to our theoretical predictions (
figure 2).
The resonance frequencies of the device change when molecules are deposited atop silica due to the dispersion properties of the Love wave propagation [
17]. Mass sensitivity (Sm) for acoustic wave sensors is defined as the incremental frequency change occurring in response to an incremental change in mass per unit area on the surface of the device [
18-
19] as follows:
where Δm is the uniformly distributed mass per unit area added to the surface of the device, f
0 is the unperturbed resonance frequency of the device and Δf is the change in the operational frequency due to mass loading effects. If the thickness of the film is less than one-tenth of the acoustic wavelength, a first-order perturbation theory then can be used to calculate the variations of the operational frequency. As shown by Wang et al. [
20], the frequency shift becomes smaller as the layer thickness increases [
21].
3. Results and discussion
3.1 Design of the Love wave device
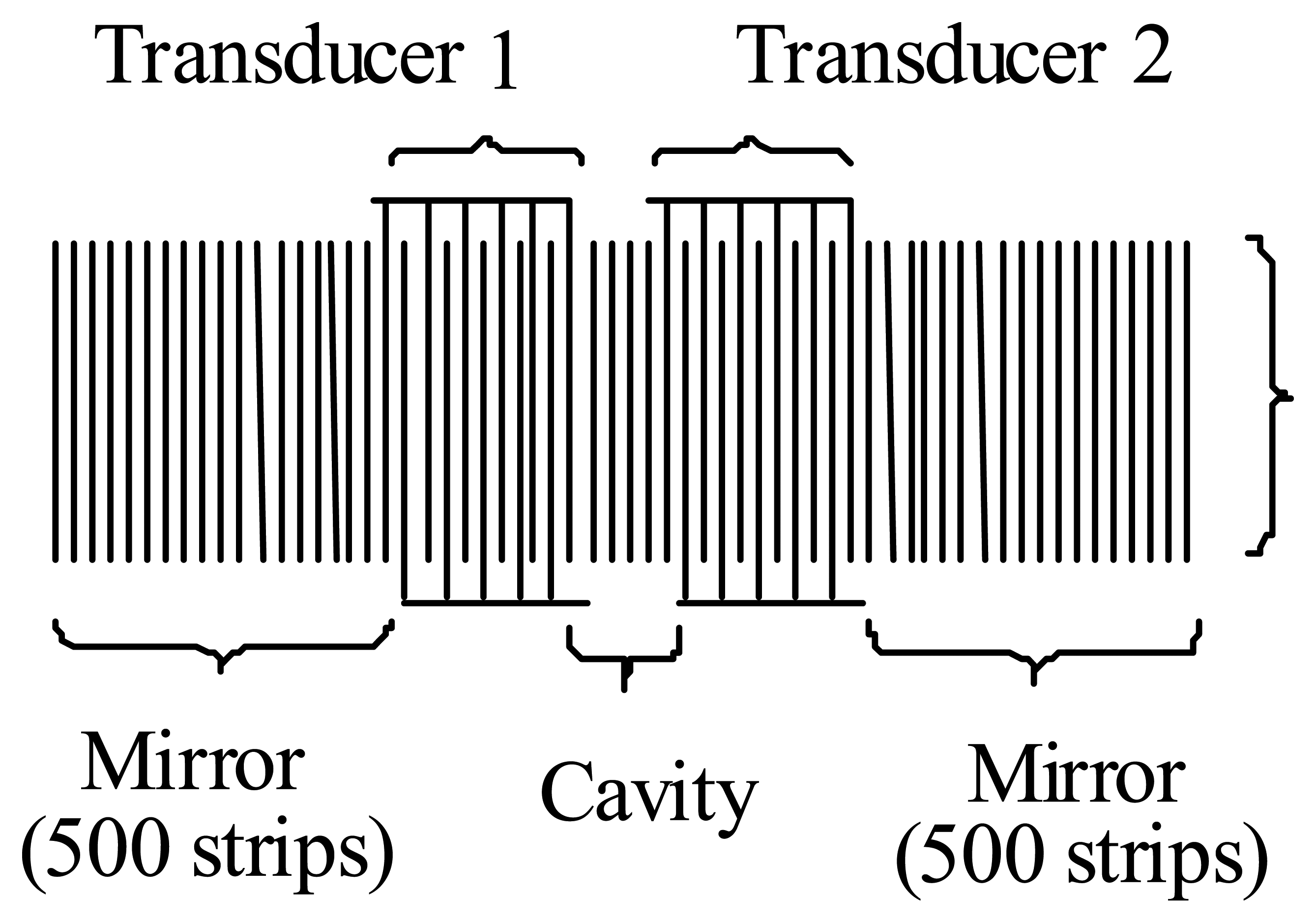
Love-wave devices have been manufactured according to the scheme reported in
figure 3. Interdigital transducers (IDTs) consist of finger pairs with a periodicity of 12.5 μm. The electrodes were made of 600 nm thick sputtered aluminum and patterned using conventional photolithography. A 1 μm thick SiO
2 sensing layer was deposited atop electrodes using PECVD. The dimension of the acoustic cavity is 300*3000μm.
3.2 Fabrication of the Micro fluidic system
Packaging is one of the most significant challenges for biosensor developments. As is may influence the overall sensing performances of the final device, it requires some design and manufacturing efforts. The acoustic wave is generated and received using IDTs and the separation between the transducers defines the sensing area (
figure 3). Even using pure shear waves, the presence of liquids atop IDTs generates significant damping effects particularly for quartz-based devices [
21].
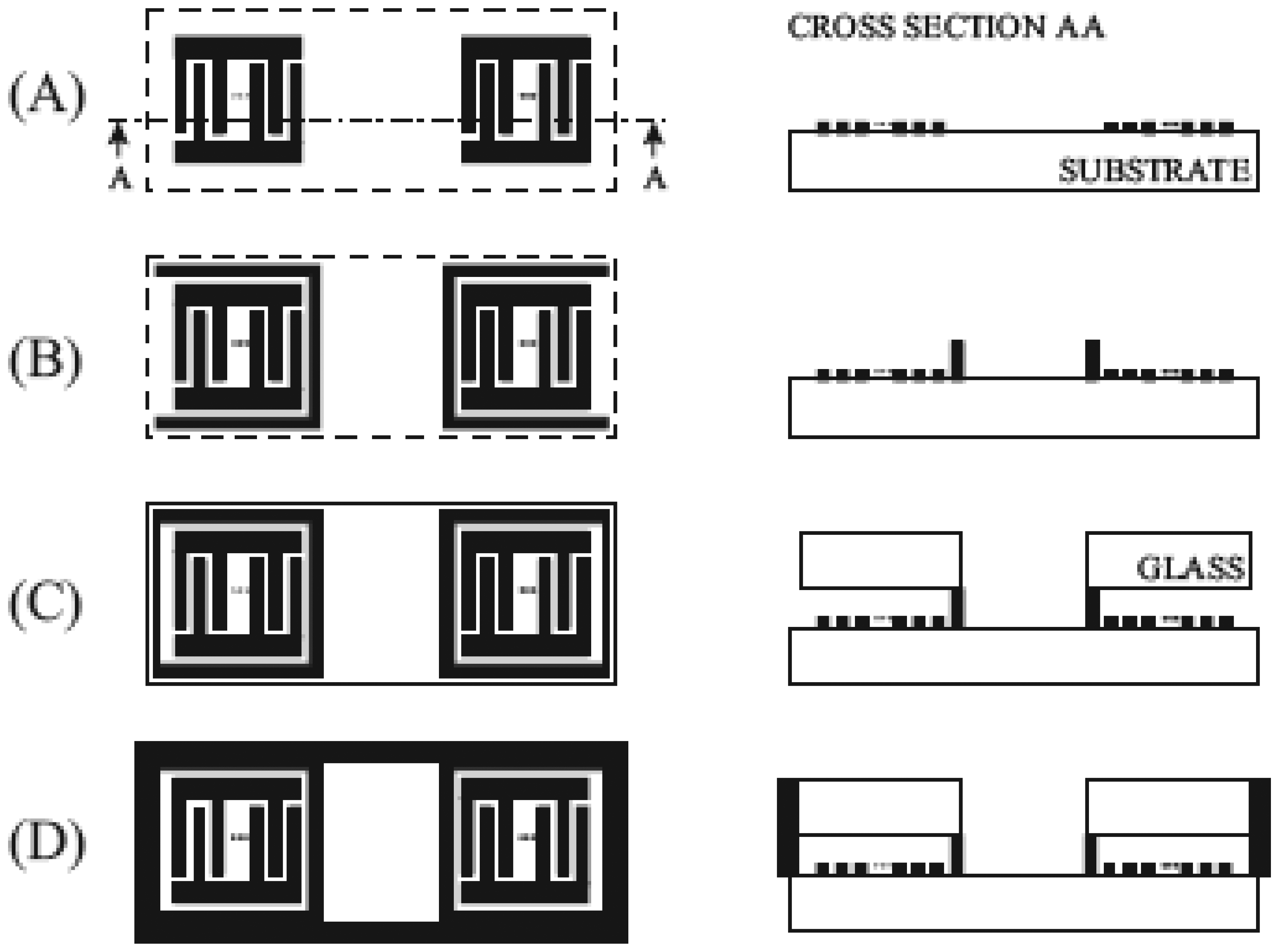
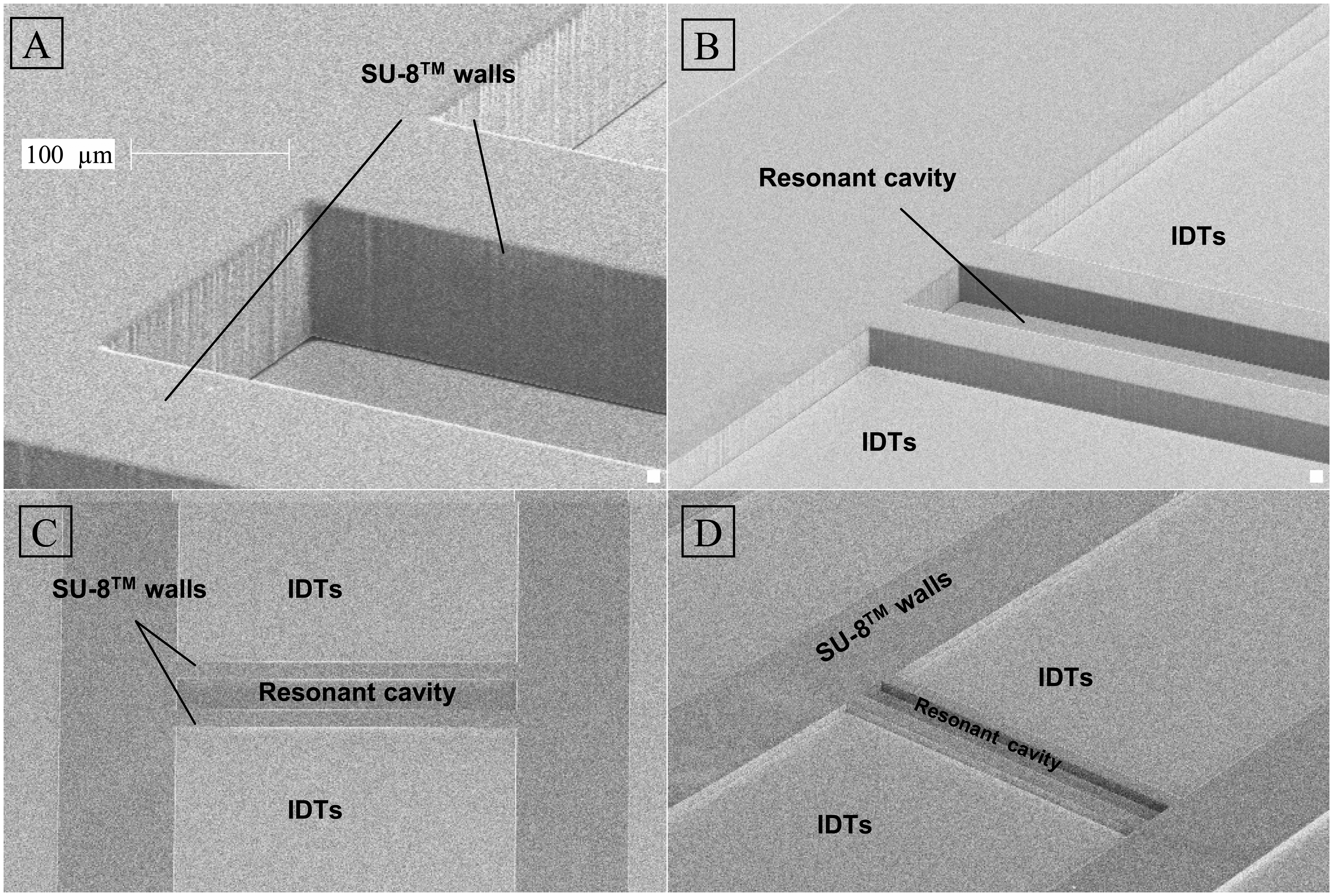
A liquid cell fabricated using the SU-8™ photo-resist has been developed to prevent the presence of liquid onto the transducers. Such SU-8™ architecture also confines the IDTs areas when covering the whole structure (using a glass plate specially designed to feed the sensing area). Thus, this structure prevents any acoustic attenuation due to unwanted contacts with the transducers' surface. This yields a physical separation between the IDTs and the acoustic sensing area by a vertical structure built above the transducers. A two-step method of fabrication was used to fabricate the liquid cell, prompted by the manufacturing process described by Francis and co-workers [
21]. The first step is achieved at the wafer level. It consists in the patterning of the SU-8™ walls. The second step takes place after the wafer dicing. It consists in the manual bonding of the glass cover. The fabrication methodology is schematically depicted in
figure 4.
Figure 5 shows scanning electron microscope (SEM) images of the SU-8™ walls. A protective glass cap with openings is later bonded above the resonant cavities to supply the device with liquids. Finally, a PDMS cover is glued above the glass cap to deliver liquids within the sensing area using needles and catheters. The whole cell (SU-8™quartz/PDMS) is accurately located atop the sensing area. Final dimensions of the sensing area are 3000 μm (length,) times 300 μm (width), and the height is 965 μm (taking the PDMS cover into account), which represents a volume cavity of about one μliter.
3.3 System set up
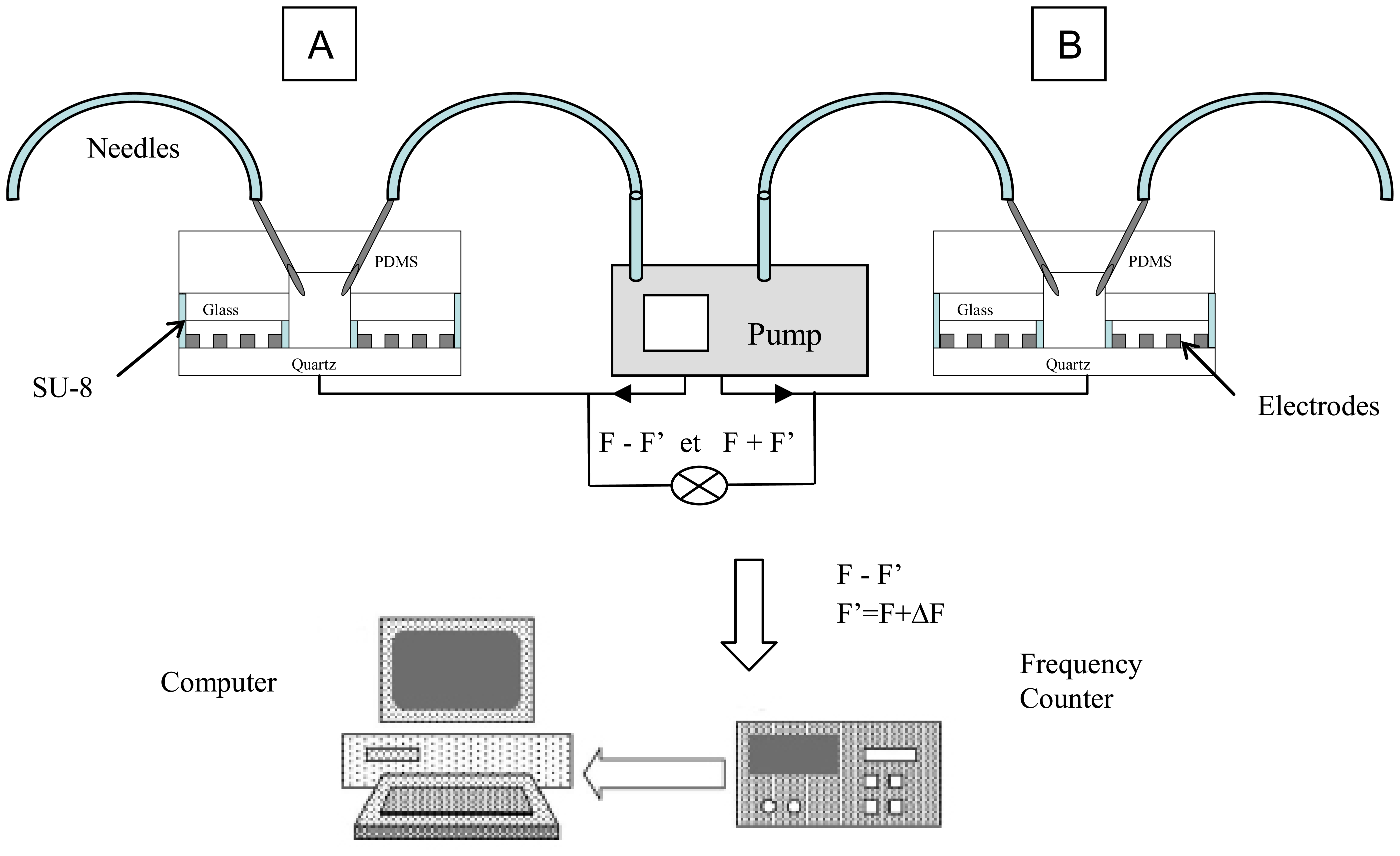
A differential setup has been developed to increase the sensitivity of the system by suppressing correlated perturbation sources (temperature, vibrations, etc.). Thus, two identical devices were built on the same chip: one is used as a reference operating in water and the other one, the sensor, is used for detection. The operating frequencies of the oscillator circuits are in the vicinity of 200 MHz. The system uses a pump which provides liquid flow at different rates. A system has been developed to compare the concentration and viscosity of different liquids (
figure 6). A first calibration of the system was achieved using different concentration of glycerol/water mixings.
3.4 Measurements
Preliminary experiments have been performed to evaluate the efficiency of the liquid cell and to check the Love-wave signal dynamics when loaded with fluids.
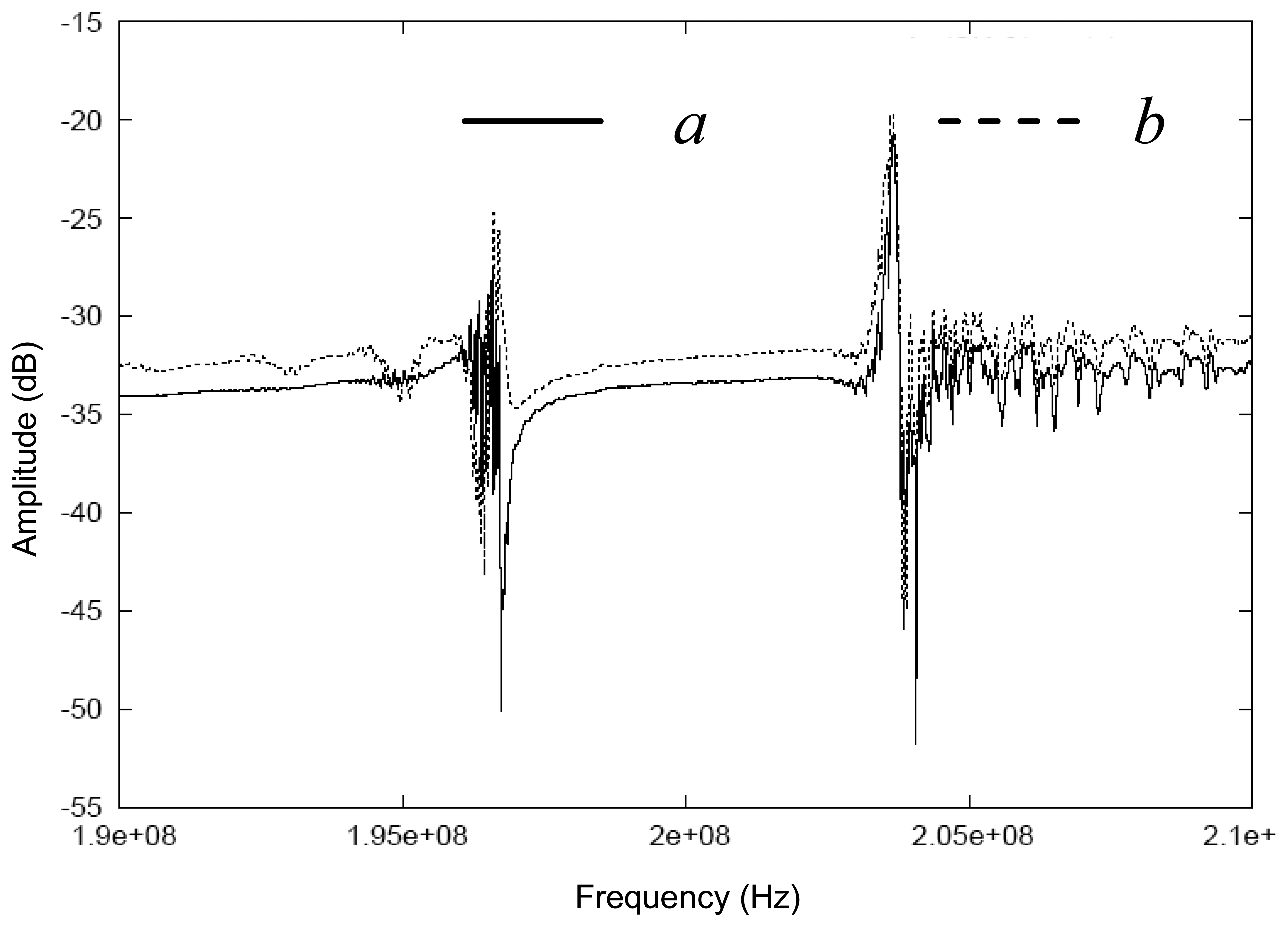
Figure 7a represents the transfer function of a Love-wave-based Silica/Quartz resonator in air and in water with the above-described system. As theoretically predicted, a second resonant contribution arises, corresponding to the end of the frequency stop band of the resonator. Results under controlled liquid flow are reported in
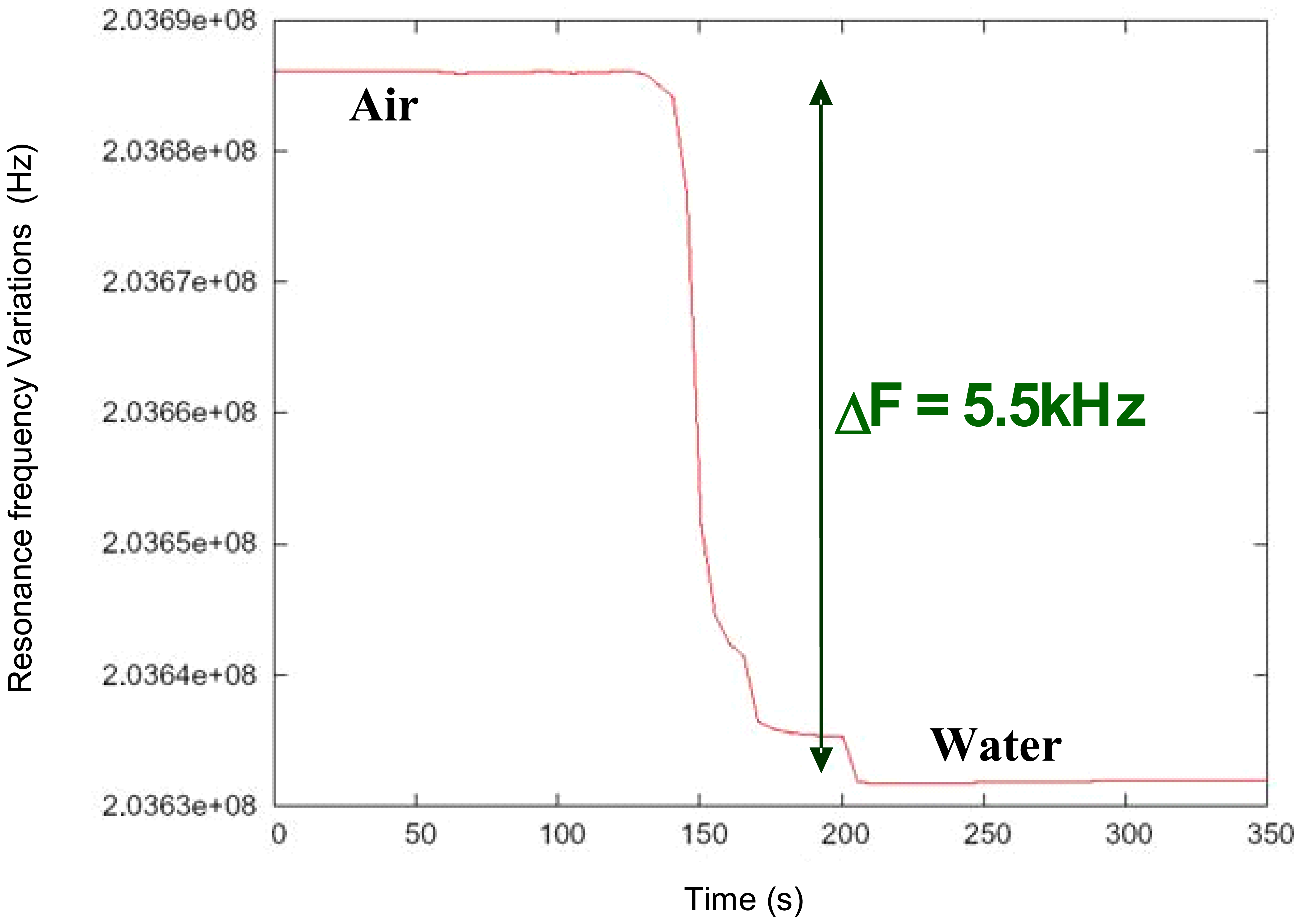
figure 7b showing the vanishing of the resonance at the beginning of the stop band at 200 MHz and the persistence of the end-of-stop band resonance at 204 MHz, as theoretically expected. The preservation of this property allows for the use of the device supplied with water, as proven by experimental measurements. The frequency shift between air and water conditions is close to 5.5 kHz (
figure 8). We also have performed viscosity measurements of aqueous and biological media.
Figure 9 illustrates the capability of the sensor to discriminate various concentrations of glycerol in aqueous media. 50 and 70% of glycerol solutions (by volume) with values of viscosity of 6 and 23 cP respectively have been tested at room temperature, giving clear shifts in frequency allowing viscosity discriminations in aqueous media.
As shown in
figure 9, one can see that the sensor resonance frequency is shifted down as expected theoretically. Frequency shifts equal to 100 Hz and 250 Hz have been found when changing the viscosity from 1 cP to 6 cP and from 1 cP to 23 cP respectively. The sensor exhibits (i) a good stability in frequency in de-ionized water and (ii) a high capability to detect the effect of the viscosity, which appears to be quite small (much smaller than 1 ppm per cP). These experimental measurements give us a good confidence in the robustness of device operation exposed to various concentrations of viscous organics.
As predicted by theoretical models, frequency shifts relative to viscosity changes of the tested liquid do not follow a linear law. It is proved that the viscosity can be reliability detected using our sensor, but it is also possible to reject its influence either by a real time direct differential process or by simply retrieve its contribution to the obtained frequency shifts using an adequate post-process. By this way, it is possible to extract specific signals of bio-molecular adsorption processes onto the sensing area.
Theses first results open the way to an integrated sensor dedicated to real time detection of macromolecules in aqueous media. The oxidized surface of silicon presents Si-O-Si backbone and Si-OH functional groups that allow for the physisorption of proteins through electrostatic interactions and hydrogen bonds. Thus, many proteins and especially Bovine Serum Albumin (BSA) can adsorb onto the surface, leading to their partial damage. BSA is a well accepted model to validate the potential of the sensor for detecting changes in surface mass [
22].
The goal of this study was not to explore the detection limits of our sensor but to prove its capability to account for reconstitution of macromolecular single layer. This was obtained by studying the changes of the SAW sensor response when injecting pulses of BSA in a phosphate buffer saline (PBS) at a pH close to 8. The saline buffer flows continually atop the reaction area, thus eliminating BSA molecules in weak interactions with the protein monolayer.
Figure 10(A) presents the response signal (i.e. the frequency shift) of the sensor to a solution of BSA 0.1 wt% injected onto the sensing area during 90 sec. This response clearly shows a strong variation of the frequency during the first seconds of contact with the sensing area following by a plateau. At the end of the injection, the signal remains globally constant with a slight drift. Further injections of BSA did not generate any other frequency shift. As previously demonstrated onto silicon dioxide surface, a single layer of BSA is obtained in one step in the same range of concentration (>μM) [
23]. Injections of BSA always lead to the same scheme (
figure 10(B)), i.e. a slight decrease of frequency during injections followed by a slow dissociation process. Thus, the global frequency shift remains constant. Results presented herein prove the efficiency of the sensor for monitoring the adsorption kinetics of protein single layer and the reconstitution of bio-molecular films onto the sensing area of the SAW sensor.
Conclusion
Pure shear polarized wave based resonators have been successfully implemented for operations using viscous fluid loads. We have implemented a specific wave-guide design exhibiting a good robustness to viscous effects (provided the viscosity remains below 50 cP). It also has been observed that the liquid cell actually prevents the presence of liquids on the IDTs and allows for preserving the acoustic wave dynamics. Results under controlled water flow show that the signal amplitude allows for measurements and detection of bio-molecular interactions at the protein single layer level in real time without any labeling in aqueous environment. An illustration of the sensor operation finally has been reported, using BSA as a model for demonstrating the ability of the sensor to monitor adsorption phenomena. Future developments of the present work will be dedicated to provide a quantitative analysis of surface chemical reactions using our sensors, in order to actually measure biochemical concentrations under various operating conditions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









