Development of Standardization and Management System for the Severity of Unpaved Test Courses

Abstract
:1. Introduction
2. Development of the Profilometer
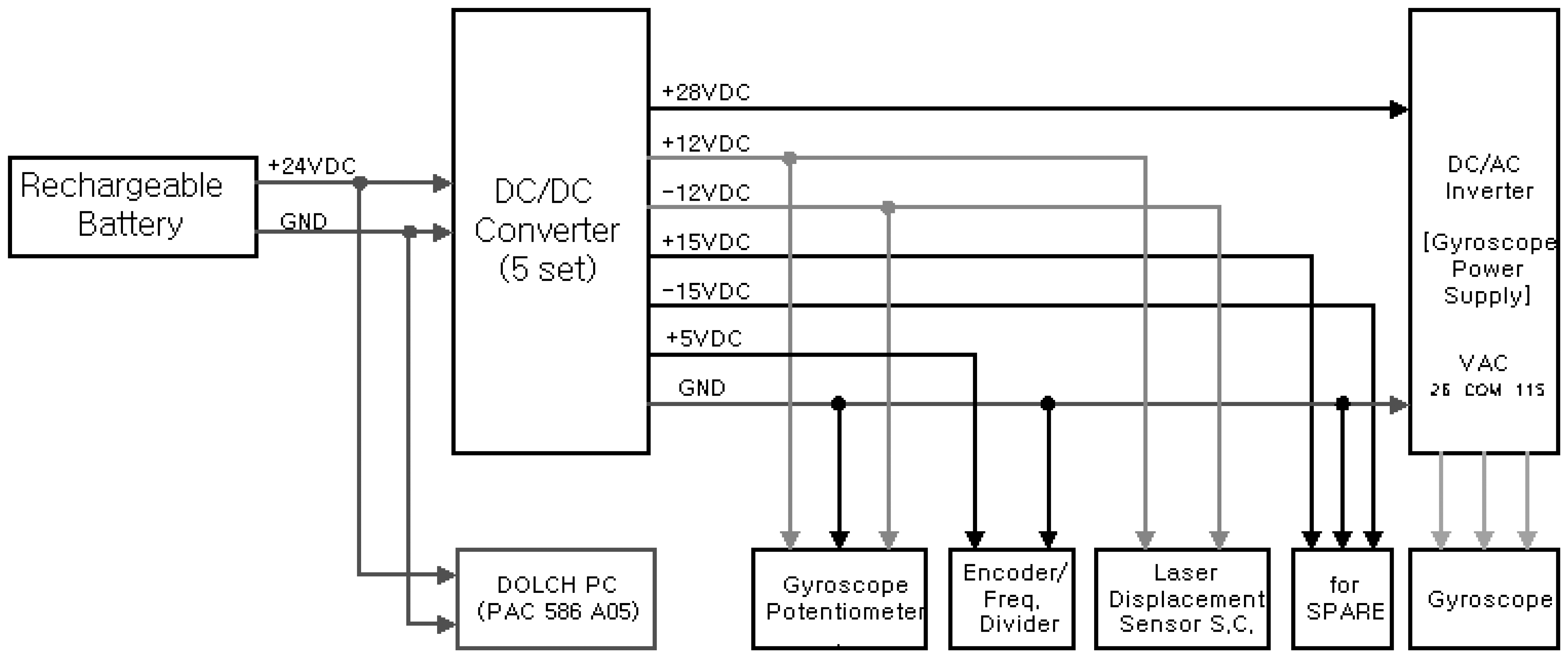
2.1. Composition of Hardware
2.1.1 Trailer
2.1.2. Tractor
2.2. Components of Software
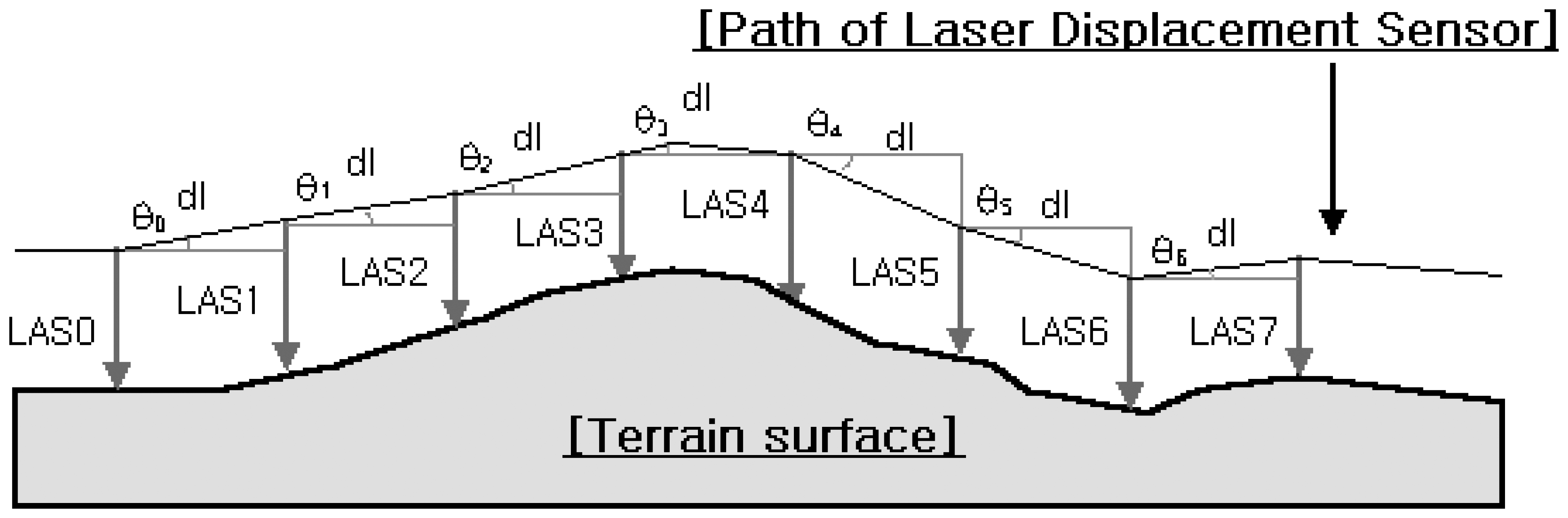
2.2.1. Generating Algorithm for profile
2.2.2. Analyzing Algorithms for profile severity
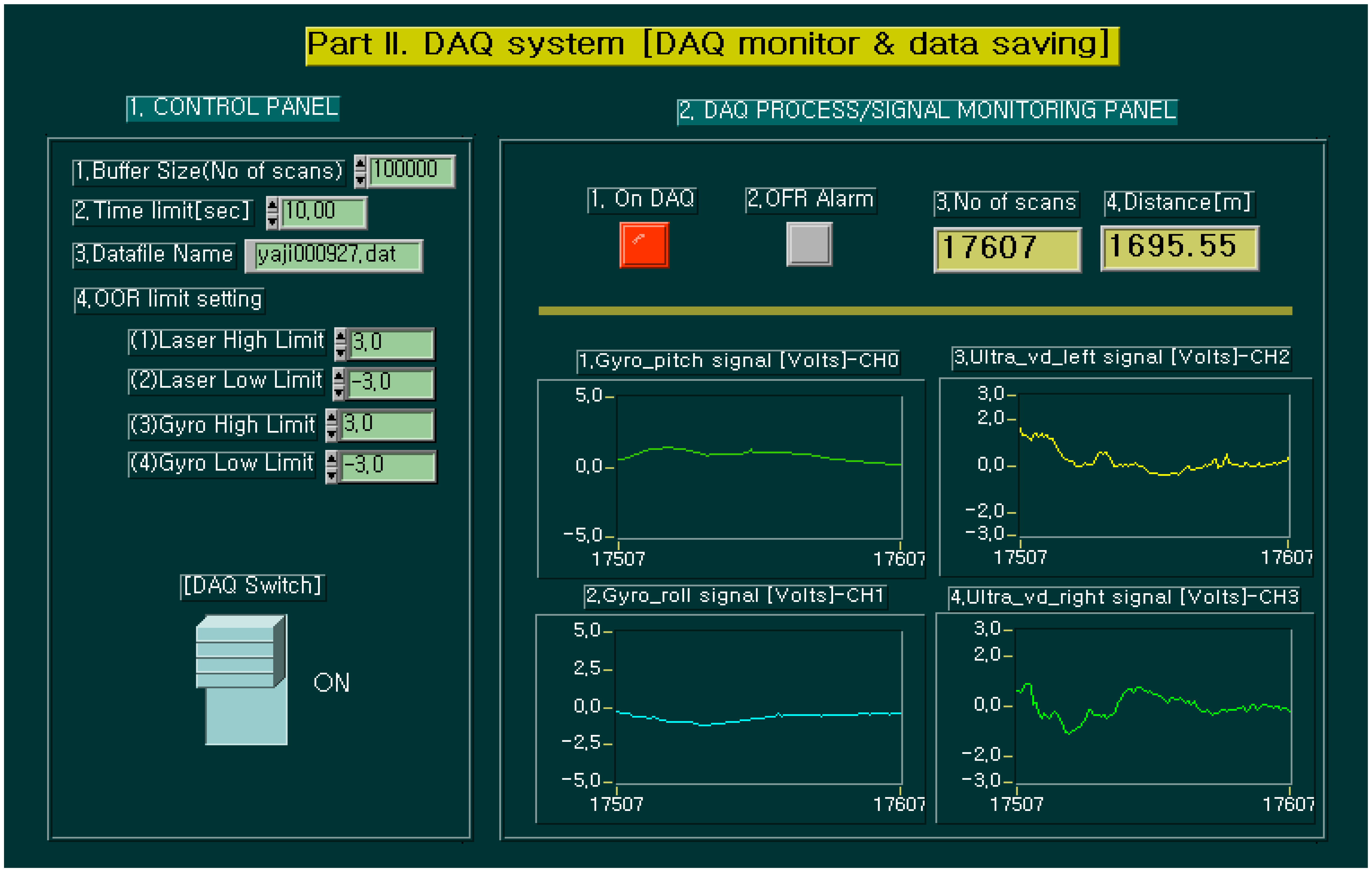
2.2.3. Operating Program
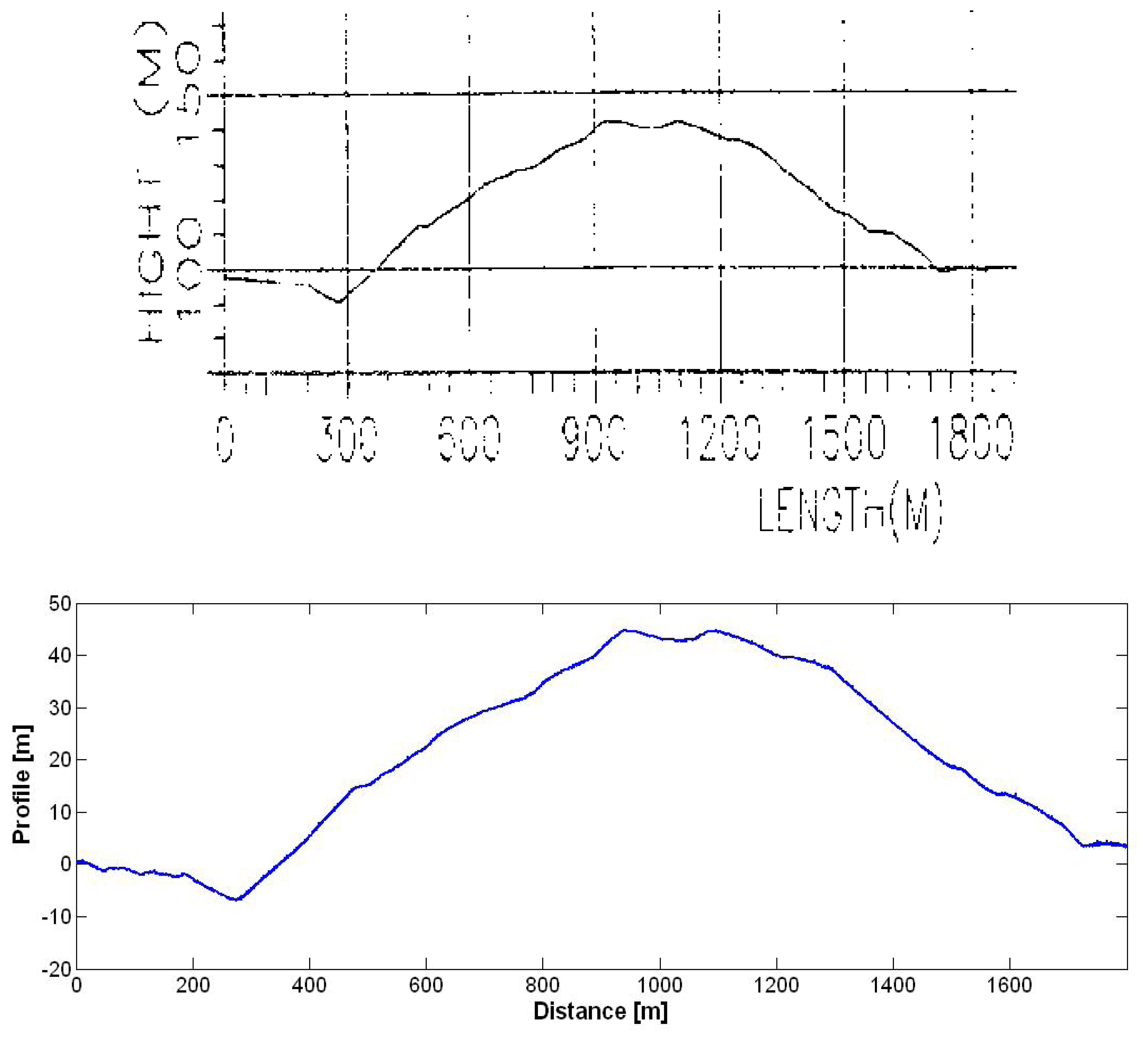
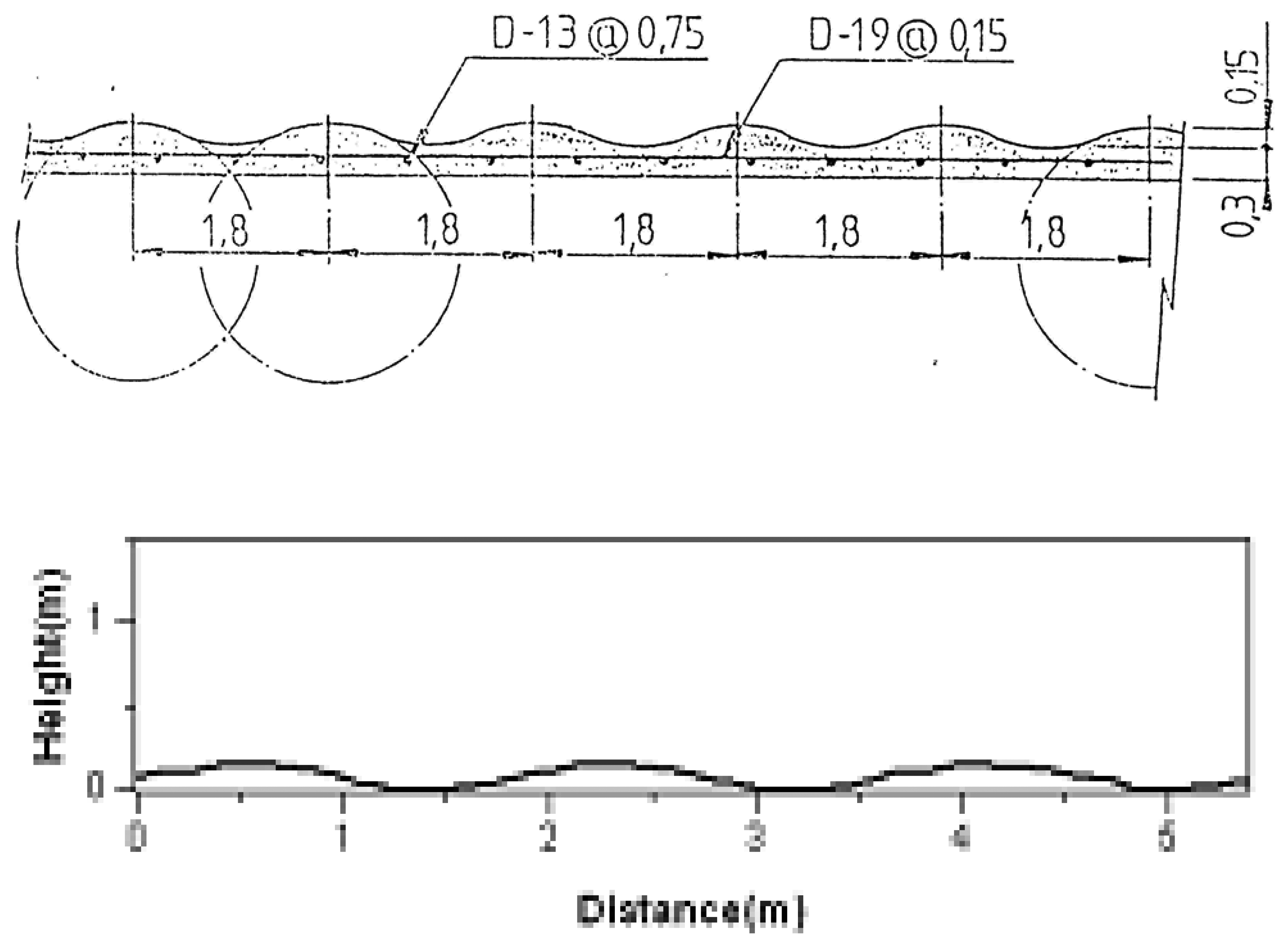
2.3. Proof of profilometer
3. Road Profile Characteristic Analysis and Severity Standardization
3.1. Road Classification in ISO 8608 standard
3.2. Profile Measurement and Characteristic Analysis on Unpaved Road
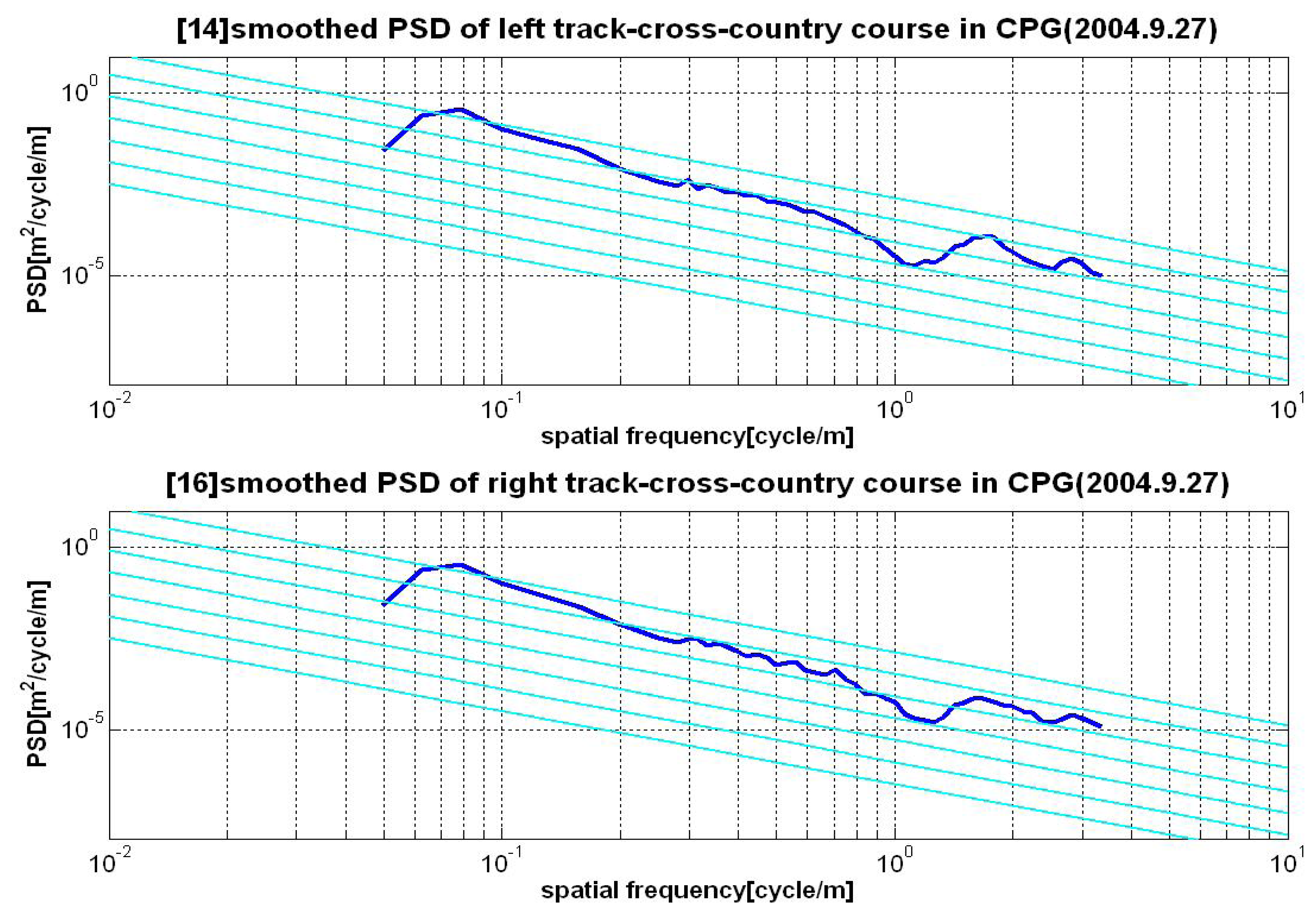
3.2.1. Cross-country Course in CPG
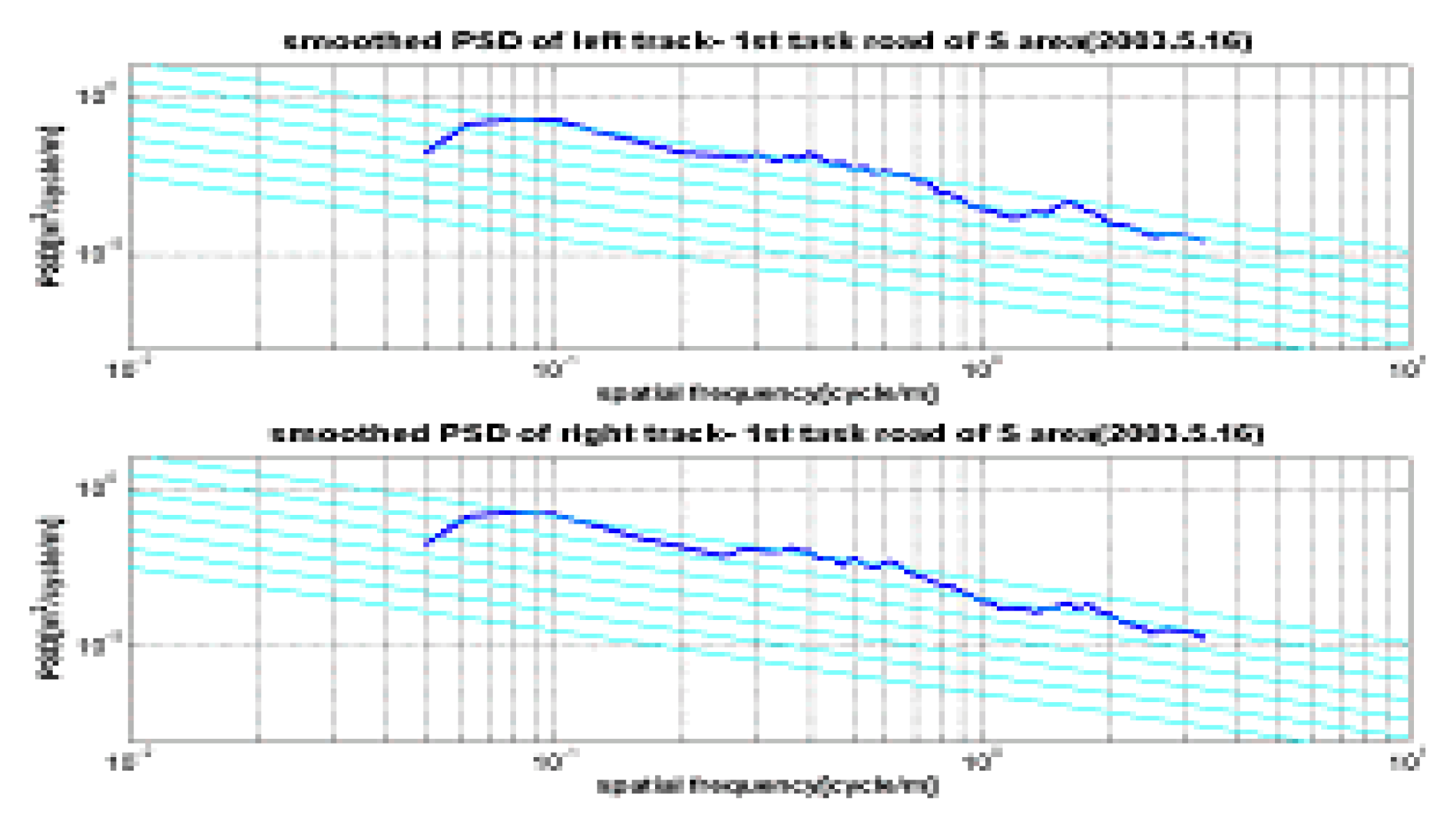
3.2.2. Some Unpaved Roads
3.2.3. Comparison of Road Profile Severity
3.3. Severity Standardization and Similarity Evaluation of Road Profile
3.3.1. Severity Standardization and Control Range Establishment of Road Profile
3.3.2. Evaluation on Similarity of Road Severity
- 1)
- Correlation Index of PSD PatternCorrelation index is used for examining the relationship between two functions or two data. When correlation index is 1, two functions or data have totally same pattern, and is 0, they have totally different pattern, and is –1, they have totally opposite pattern.Given data x and y as Eq.(6), correlation index between x and y, ρx,y can be obtained as Eq.(7). In Eq.(7), μx and σx, μy and σy are averages and standard deviations of data x and y.In the case that data is PSDs of road profiles, correlation index ρx,y has nothing to do with PSD magnitudes of road profiles, but it is closely related with PSD patterns or PSD shapes.
- 2)
- Inclusion Index for Control RangesTo evaluate the similarity of road profile characteristics, we should consider not only PSD pattern but also PSD magnitude. So we defined inclusion index for control ranges, γx,y as Eq.(8) to compare magnitudes of profile PSD, between arbitrary unpaved road and cross-country course in CPG. γx,y is a simple rate whether each PSD magnitude at 52 spatial frequency is included in the established control ranges of cross-country course in CPG or not.Here, nx,y is the numbers of profile PSD values of arbitrary roads (y) which are included in the PSD control ranges of the cross country (x) in the CPG.Figure 15 shows PSD of the cross-country measured at 3rd quarter of 2003, and it gives that 4 of PSD magnitudes at spatial frequency (1.0, 1.0595, 1.1225, and 2.8784cycle/m) mark as ■, exceed the control ranges. So the inclusion comes to 0.9985 in this case.
- 3)
- Similarity IndexTo evaluate the similarity of road profile characteristics, we defined similarity index, δx,y as Eq.(9).Here, ν is a weighting factor, and we applied ν as 0.3 subjectively. This means that we put higher value on inclusion index than correlation index determined by PSD pattern.
3.3.3. Results of Similarity Evaluation
4. Road Severity Management Algorithm using Neural Network
4.1. Evaluation of PSD effect
4.2. Development of Road Profile Severity Management Algorithm
4.2.1. Architecture
4.2.2. Applied Learning Rule
- Step 1. Weights w and v are initialized at small random values (-0.5∼0.5); w is (k × j), v is (j × i). And Error value E is initialized 0.
- Step 2. Training step starts here. Input is presented and then the layer's outputs are computed such as Eq.(10). Applied λ=1 for unipolar sigmoid function. And P is applied 208 which is the number of training pairs.
- Step 4. For activation function of an neuron is used the unipolar continuous sigmoid function, error signal vectors δok and δyj of both layers are computed such as Eq.(12) and Eq.(13).
- Step 5. Output layer weights are adjusted such as Eq.(14).
- Step 6. Hidden layer weights are adjusted such as Eq.(15).
- Step 7. If p < P then p ← p + 1, q ←q + 1 and go to step 2; otherwise, go to step 8.
- Step 8. The training cycle is completed.For E < Emax terminate the training session. Output weights w, v, q, E.If E > Emax, then E ← 0, q ← 1 and initiate the new training cycle by going to step 2.
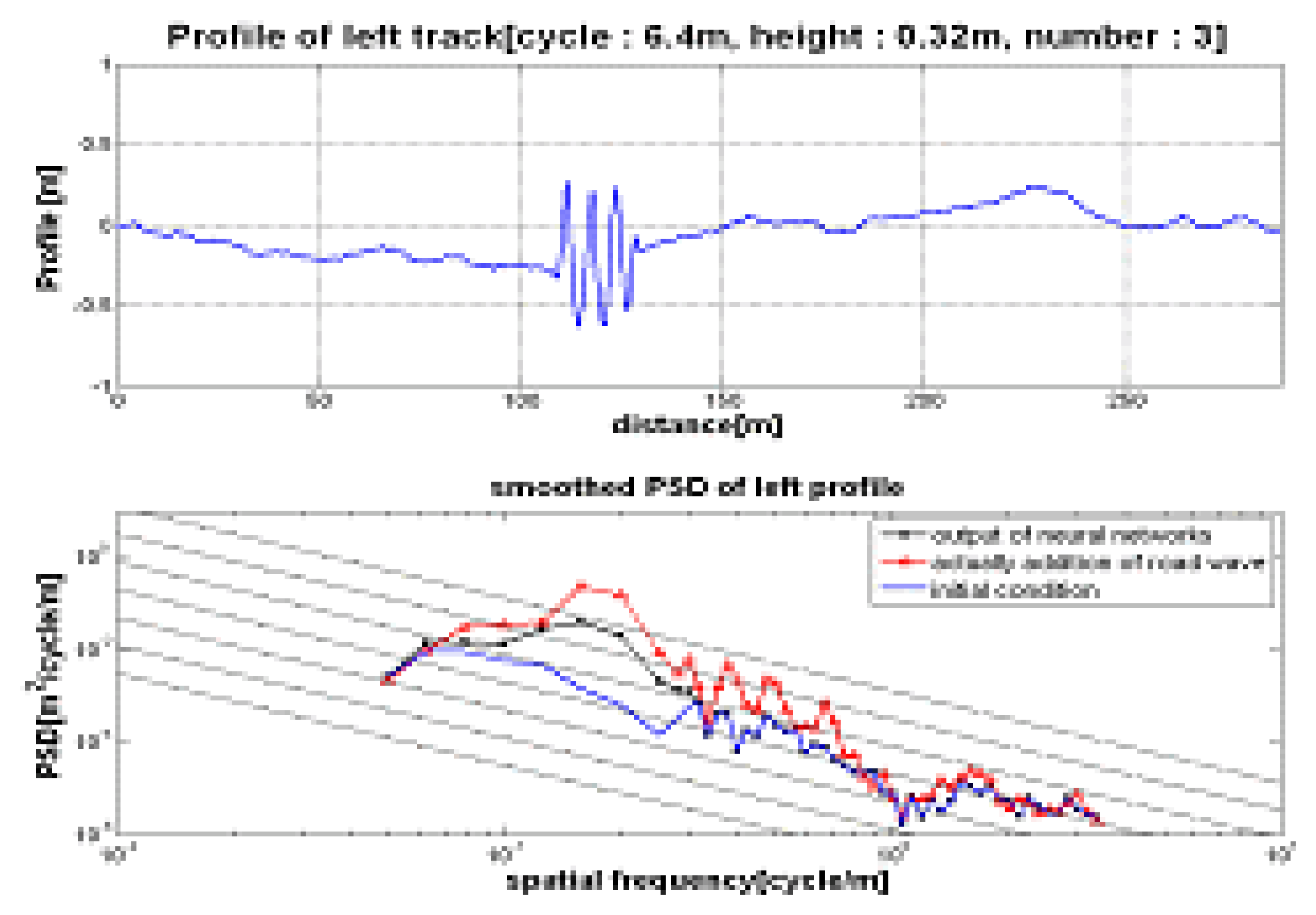
4.3. Experimental Results and Discussion
5. Summary and Conclusions
- 1)
- The system composed of profilometer and data analysis program according to the ISO 8608 standard process is very effective in measurement and analysis for unpaved road profile.
- 2)
- The severity of road including the cross-country test course in CPG and the task road in Army Operating Area has been classified into eight grades according to the criterion of ISO 8608 standard.
- 3)
- By introducing the similarity index to evaluate the quantified profile characteristics between roads, the reliability of the endurance test for development vehicle of military is enhanced.
- 4)
- The Road Severity Management Algorithm including the severity standardization can be used to implement the road management in order to maintain the severity level.
References and Notes
- Connon, W. H. Determining Vehicle Sensitivity to Changes in Test - Course Roughness. IEST 46th Annual Technical Meeting and Exposition. 2000, 30–37. [Google Scholar]
- Dodds, C. J.; Robson, J. D. The description of the road profile roughness. Journal of Sound and Vibration 1973, 31, 175–183. [Google Scholar]
- Min, B.H.; Jeong, W.U. Design Method of Test Road Rrofile for Vehicle Accelerated Durability Test. Journal of KSAE 1994, 2(1), 128–141. [Google Scholar]
- Castaldo, P.D.; Allred, J.A.; Reil, M.J. Terrain Profilometer.; Technical Report; Aberdeen Proving Ground of US Army, 2000. [Google Scholar]
- Tomoaki, M.; Seikichi, N.; Kanagawa, K.; Inoue, Y.; Yoshioka, K.; Matsushita, Y.; Shimura, A. Study on the characteristics of terrain profiles to develop the tracked vehicle suspension.; Technical Report; Technical Research and Development Institute in Japan Defense Agency, 1992. [Google Scholar]
- La Barre, R.P.; Forbes, R.T.; Andrew, S. The Measurement and Analysis of Road Surface Roughness.; Technical Report; Motor Industry and Research Association, 1969. [Google Scholar]
- ISO. Mechanical Vibration - Road Surface Profiles - Reporting of Measured Data. ISO 8608:1995(E). 1995.
- Ashmore, S.C.; Hodges, H.C. Dynamic Force Measurement Vehicle (DFMV) and Its Application to Measuring and Monitoring Road Roughness.; Vehicle, Tire, Pavement Interface, ASTM STP 1164 American Society for Testing and Materials: Philadelphia; pp. 69–96. 1992. [Google Scholar]
- Xu, D.M.; Mohamed, A.M.O.; Yong, R.N.; Caporuscio, F. Development of a Criterion for Road Surface Roughness Based on Power Spectral Density Function. Journal of Terramechanics 1992, 29, 477–486. [Google Scholar]
- Mitra, S.; Pal, S.K. Self-Organizing Neural Network As A Fuzzy Classfier. IEEE Trans. on Sys., Man. and Cybern. 1994, 24(3), 385–398. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Class | Gd(nc) 10-6 m3 | Octave centre spatial frequency, nc (cycle/m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.0078 | 0.0156 | 0.0312 | 0.0625 | 0.125 | 0.25 | 0.5 | 1 | 2 | 4 | ||
| A | Mean | 2621 | 655 | 164 | 41.0 | 10.2 | 2.56 | 0.64 | 0.16 | 0.04 | 0.01 |
| Upper | 5243 | 1311 | 328 | 81.9 | 20.5 | 5.12 | 1.28 | 0.32 | 0.08 | 0.02 | |
| B | Lower | 5243 | 1311 | 328 | 81.9 | 20.5 | 5.12 | 1.28 | 0.32 | 0.08 | 0.02 |
| Mean | 10486 | 2621 | 655 | 163.8 | 41.0 | 10.24 | 2.56 | 0.64 | 0.16 | 0.04 | |
| Upper | 20972 | 5243 | 1311 | 327.7 | 81.9 | 20.48 | 5.12 | 1.28 | 0.32 | 0.08 | |
| C | Lower | 20972 | 5243 | 1311 | 327.7 | 81.9 | 20.48 | 5.12 | 1.28 | 0.32 | 0.08 |
| Mean | 41943 | 10486 | 2621 | 655.4 | 163.8 | 40.96 | 10.24 | 2.56 | 0.64 | 0.16 | |
| Upper | 83886 | 20972 | 5243 | 1310.7 | 327.7 | 81.92 | 20.48 | 5.12 | 1.28 | 0.32 | |
| D | Lower | 83886 | 20972 | 5243 | 1310.7 | 327.7 | 81.92 | 20.48 | 5.12 | 1.28 | 0.32 |
| Mean | 167772 | 41943 | 10486 | 2621.4 | 655.4 | 163.84 | 40.96 | 10.24 | 2.56 | 0.64 | |
| Upper | 335544 | 83886 | 20972 | 5242.9 | 1310.7 | 327.68 | 81.92 | 20.48 | 5.12 | 1.28 | |
| E | Lower | 335544 | 83886 | 20972 | 5242.9 | 1310.7 | 327.68 | 81.92 | 20.48 | 5.12 | 1.28 |
| Mean | 671089 | 167772 | 41943 | 10485.8 | 2621.4 | 655.36 | 163.84 | 40.96 | 10.24 | 2.56 | |
| Upper | 1342177 | 335544 | 83886 | 20971.5 | 5242.9 | 1310.72 | 327.68 | 81.92 | 20.48 | 5.12 | |
| F | Lower | 1342177 | 335544 | 83886 | 20971.5 | 5242.9 | 1310.72 | 327.68 | 81.92 | 20.48 | 5.12 |
| Mean | 2684354 | 671089 | 167772 | 41943.0 | 10485.8 | 2621.44 | 655.36 | 163.84 | 40.96 | 10.24 | |
| Upper | 5368709 | 1342177 | 335544 | 83886.1 | 20971.5 | 5242.88 | 1310.72 | 327.68 | 81.92 | 20.48 | |
| G | Lower | 5368709 | 1342177 | 335544 | 83886.1 | 20971.5 | 5242.88 | 1310.72 | 327.68 | 81.92 | 20.48 |
| Mean | 10737417 | 2684354 | 671089 | 167772.1 | 41943.0 | 10485.76 | 2621.44 | 655.36 | 163.84 | 40.96 | |
| Upper | 21474834 | 5368709 | 1342177 | 335544.3 | 83886.1 | 20971.52 | 5242.88 | 1310.72 | 327.68 | 81.92 | |
| H | Lower | 21474834 | 5368709 | 1342177 | 335544.3 | 83886.1 | 20971.52 | 5242.88 | 1310.72 | 327.68 | 81.92 |
| Mean | 42949668 | 10737417 | 2684354 | 671088.6 | 167772.1 | 41943.04 | 10485.76 | 2621.44 | 655.36 | 163.84 | |
| task road | Low Frequency. | Middle Frequency | High Frequency | |||
|---|---|---|---|---|---|---|
| cross-country | F | G | F | E | F | |
| M-3rd area | F | G | F | G | E | F |
| S-1st area | F | G | G | H | F | G |
| Y-D area | G | G | F | G | ||
| J-1st area | E | F | E | F | D | E |
| Task Road Name | ρx,y | γx,y | δx,y |
|---|---|---|---|
| M-1st area | 0.961 | 1.000 | 0.988 |
| M-3rd area | 0.971 | 0.904 | 0.924 |
| S-1st area | 0.935 | 0.327 | 0.509 |
| Y-D area | 0.902 | 0.154 | 0.378 |
| J-1st area | 0.942 | 0.673 | 0.754 |
| D-2nd area | 0.956 | 0.923 | 0.933 |
| average | 0.945 | 0.664 | 0.748 |
| average PSD's | 0.960 | 0.769 | 0.826 |
| Spatial frequency (m/cycle) | Object value (m3/cycle) | Neural output (m3/cycle) | Measuring value (m3/cycle) |
|---|---|---|---|
| 0.1250 | 0.03 | 0.04 | |
| 0.1563 | 0.05 | ||
| 0.1575 | 0.04 | 0.24 | |
| 0.1984 | 0.02 | 0.15 |
| Spatial frequency (m/cycle) | Object value (m3/cycle) | Neural output (m3/cycle) | Measuring value (m3/cycle) |
|---|---|---|---|
| 0.3969 | 0.001 | 0.004 | |
| 0.4000 | 0.001 | ||
| 0.4205 | 0.001 | 0.003 | |
| 0.4455 | 0.001 | 0.003 |
| Spatial frequency (m/cycle) | Object value (m3/cycle) | Neural output (m3/cycle) | Measuring value (m3/cycle) |
|---|---|---|---|
| 2.3784 | 0.00002 | 0.00001 | |
| 2.5000 | 0.00003 | ||
| 2.5198 | 0.00003 | 0.00011 | |
| 2.6697 | 0.00002 | 0.00017 |
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Kang, D.-K.; Lee, S.-H.; Goo, S.-H. Development of Standardization and Management System for the Severity of Unpaved Test Courses. Sensors 2007, 7, 2004-2027. https://doi.org/10.3390/s7092004
Kang D-K, Lee S-H, Goo S-H. Development of Standardization and Management System for the Severity of Unpaved Test Courses. Sensors. 2007; 7(9):2004-2027. https://doi.org/10.3390/s7092004
Chicago/Turabian StyleKang, Do-Kyung, Sang-Ho Lee, and Sang-Hwa Goo. 2007. "Development of Standardization and Management System for the Severity of Unpaved Test Courses" Sensors 7, no. 9: 2004-2027. https://doi.org/10.3390/s7092004
APA StyleKang, D.-K., Lee, S.-H., & Goo, S.-H. (2007). Development of Standardization and Management System for the Severity of Unpaved Test Courses. Sensors, 7(9), 2004-2027. https://doi.org/10.3390/s7092004