An Evaluation of Radarsat-1 and ASTER Data for Mapping Veredas (Palm Swamps)

Abstract
:1. Introduction
1.1. The use of remote sensing for wetland mapping
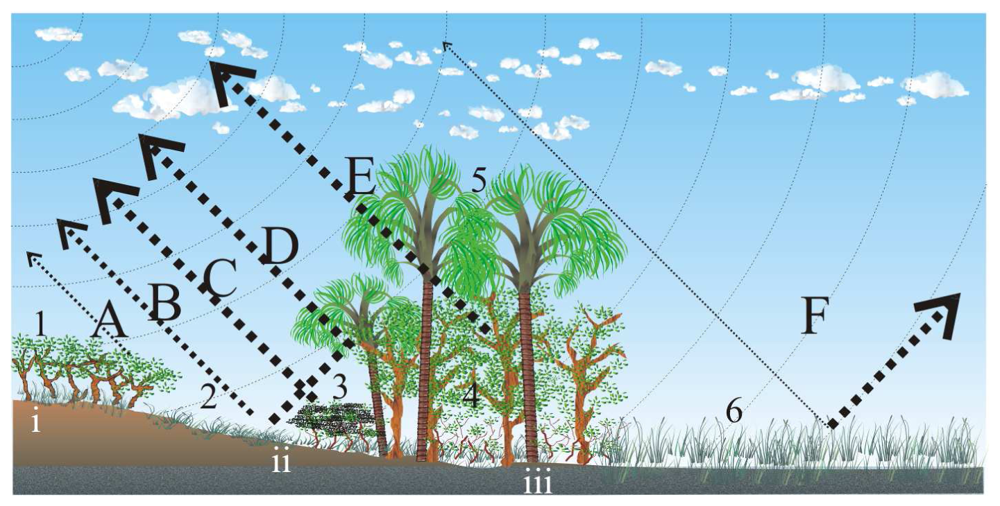
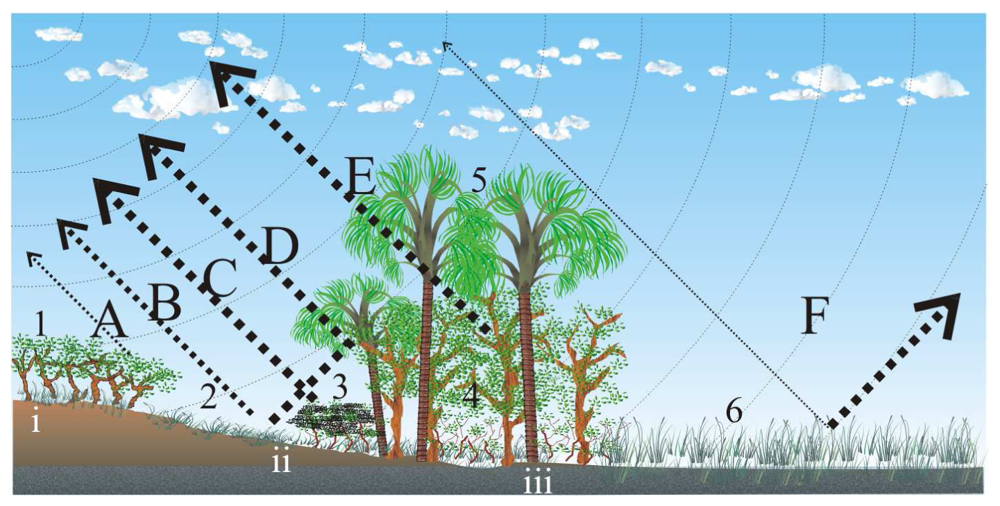
1.2. Interaction between radar backscatter and wetland vegetation
1.3. Objectives and organization of the article
2. Materials and Methods
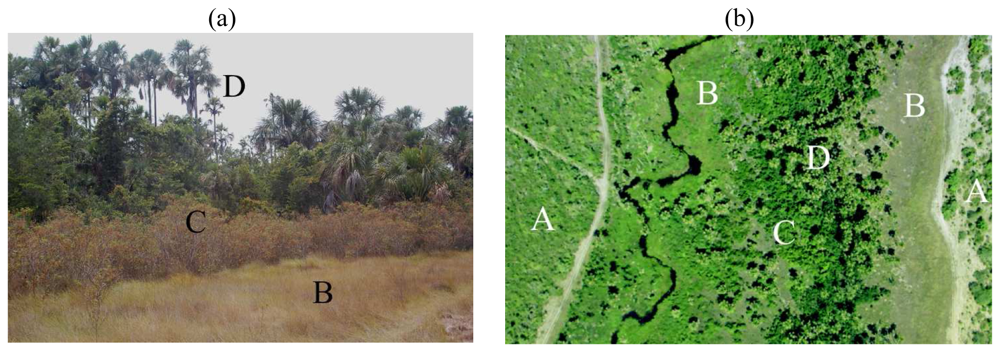
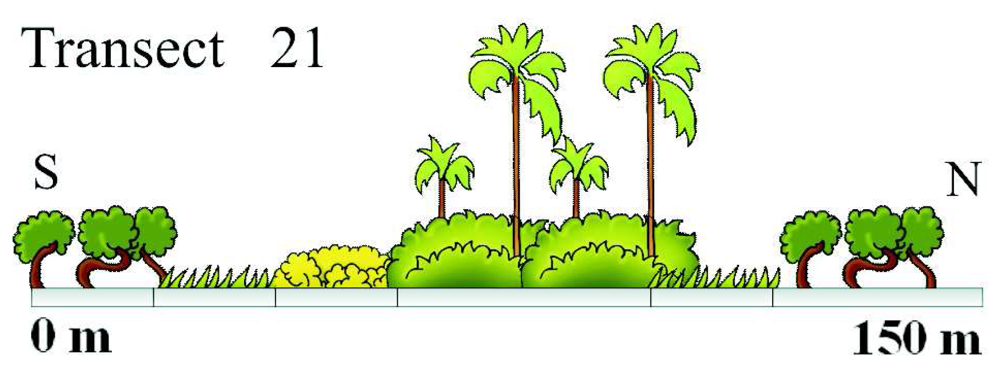
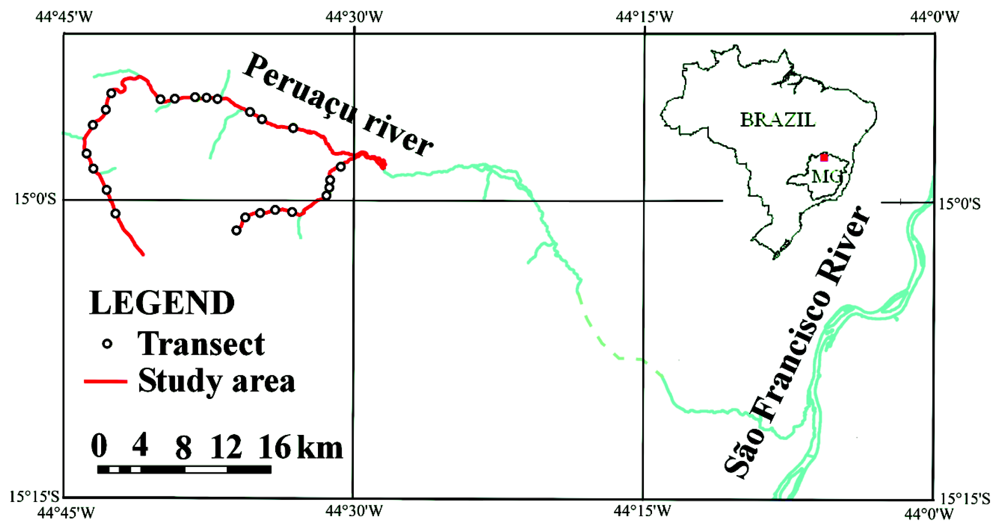
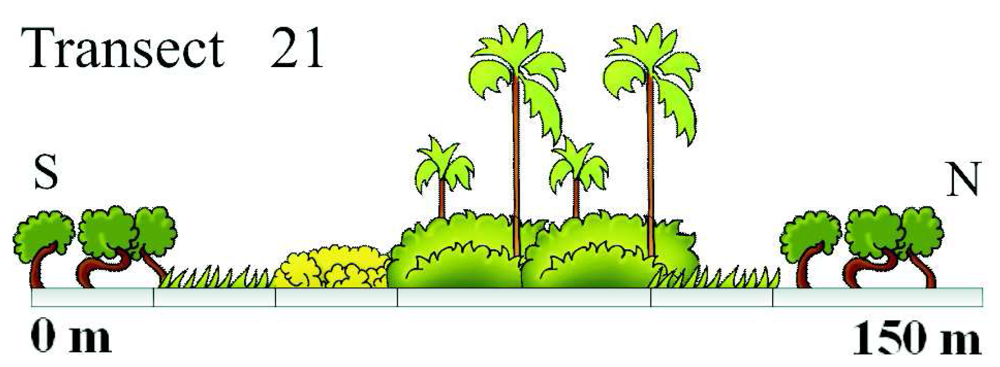
2.1. Study Area
2.2. Imagery
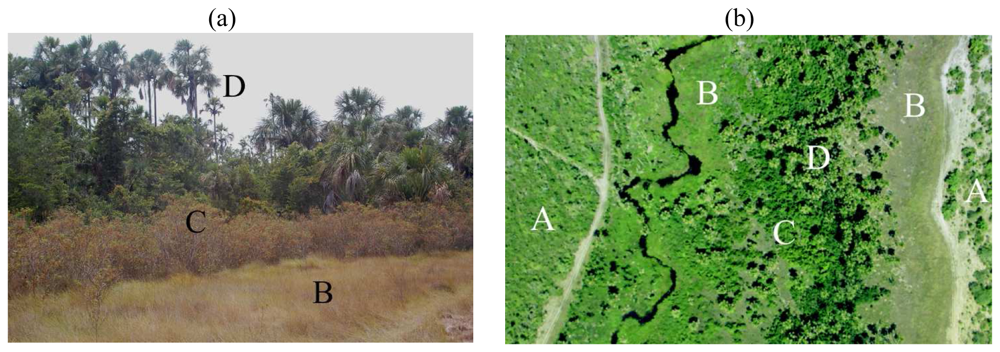
2.3. Field Work and Ground Truth Data
2.4. Hydrography-based buffering
2.5. Delineating the veredas using the Radarsat Images
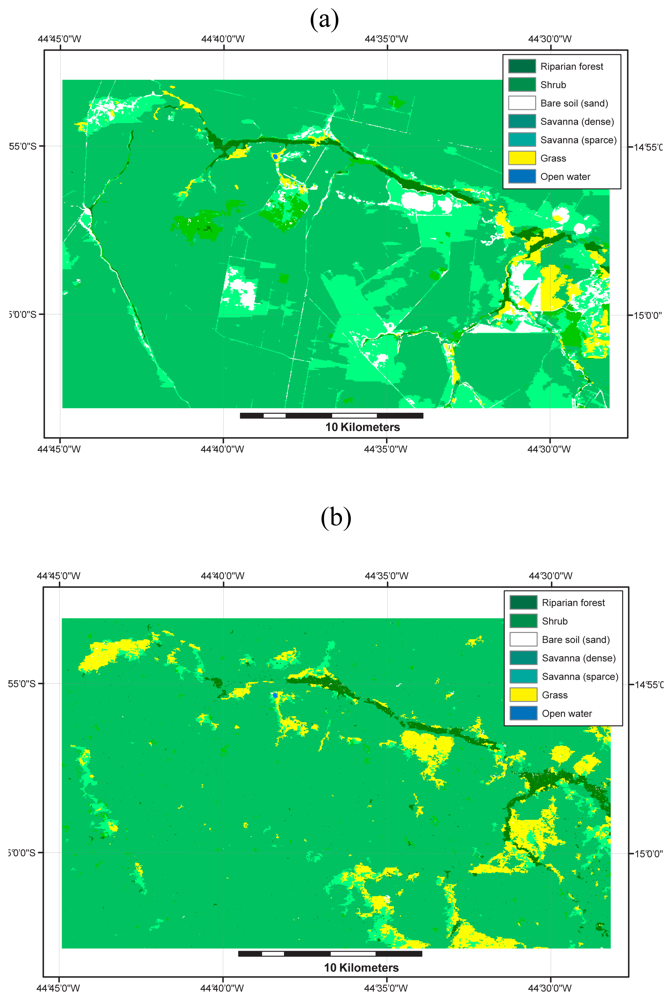
2.6. Classification of the veredas type
2.7. Statistical inference
3. Results and Discussion
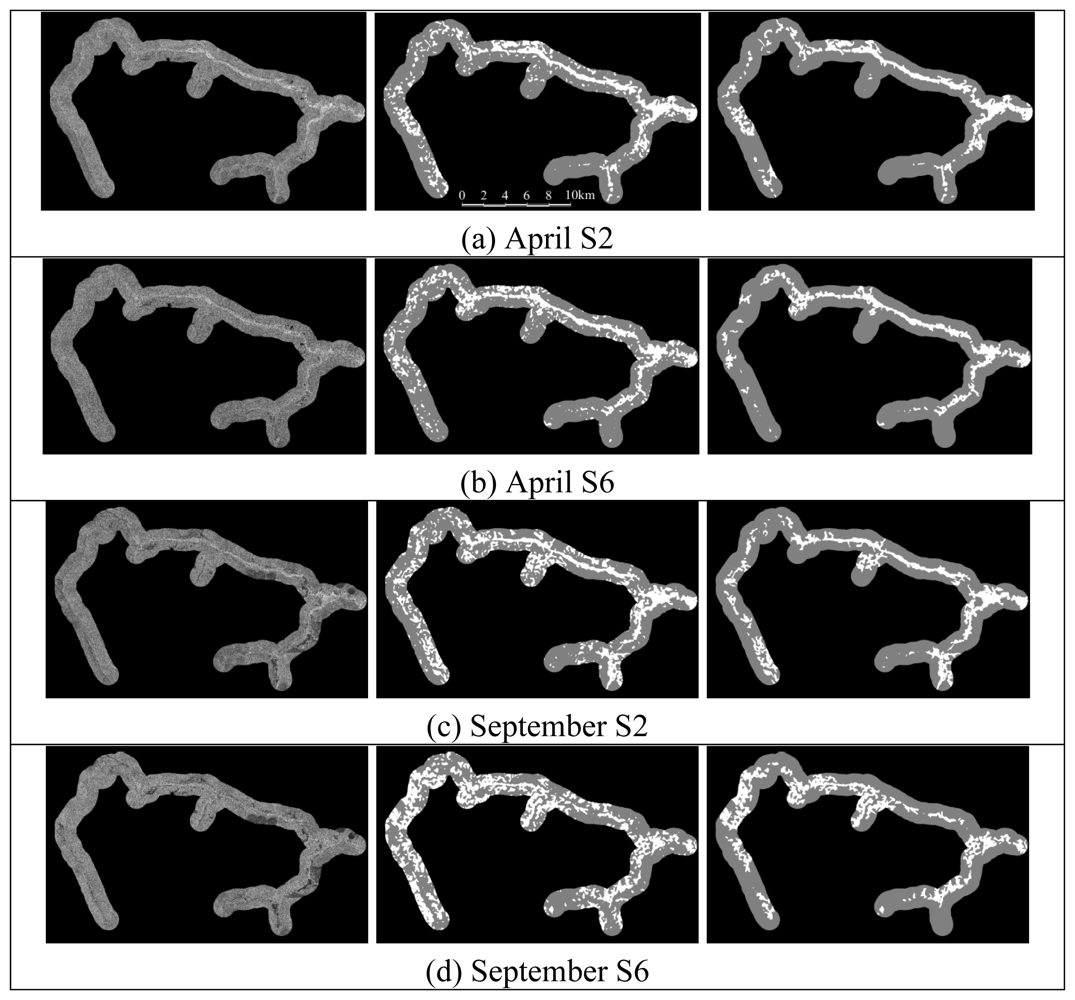
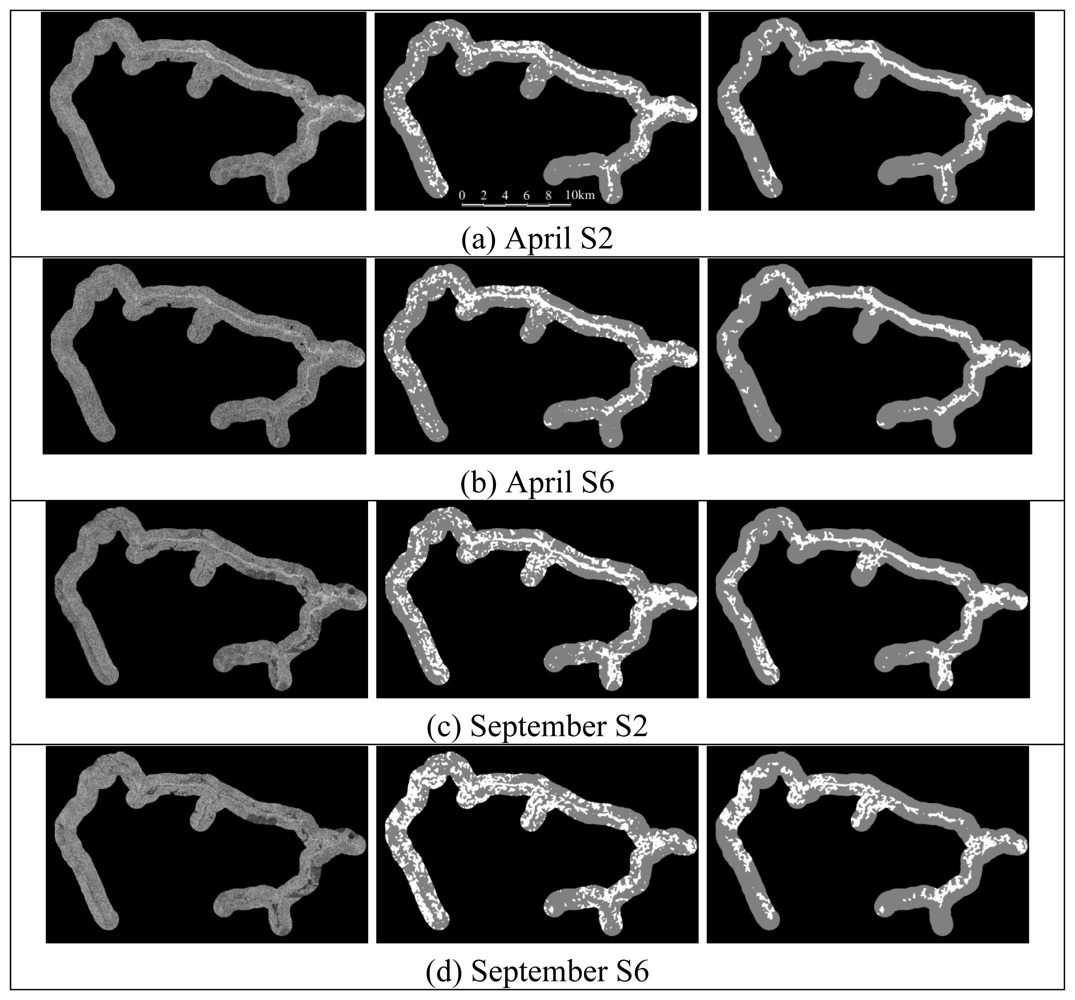
3.1. Delineating veredas
- Eliminating unconnected pixels from the results using the hydrographic network and the “contamination” approach is a necessary step.
- The April (end of the rain season) images offer better visual contrast and visually more consistent results.
- The lower incidence angle (S2), prioritizing direct backscattering (as opposed to volumetric) tends to produce more consistent results in terms of continuity (less gaps) and width of the veredas. Because veredas vary in width and many sections are quite narrow, the volumetric backscatter does not always produce a significant contrast with the surrounding savanna vegetation.
- Veredas near the headwaters are more difficult to detect probably because of their narrower width and less saturated soils. Soils in the headwater veredas were found to be generally dryer therefore the dielectric constant should be lower.
- Combining higher incidence angle (S6) and dry season (September) produce the worse visual results. This observation supports the second and third statement and veredas are much harder to detect (even visually) in the September S6 image.
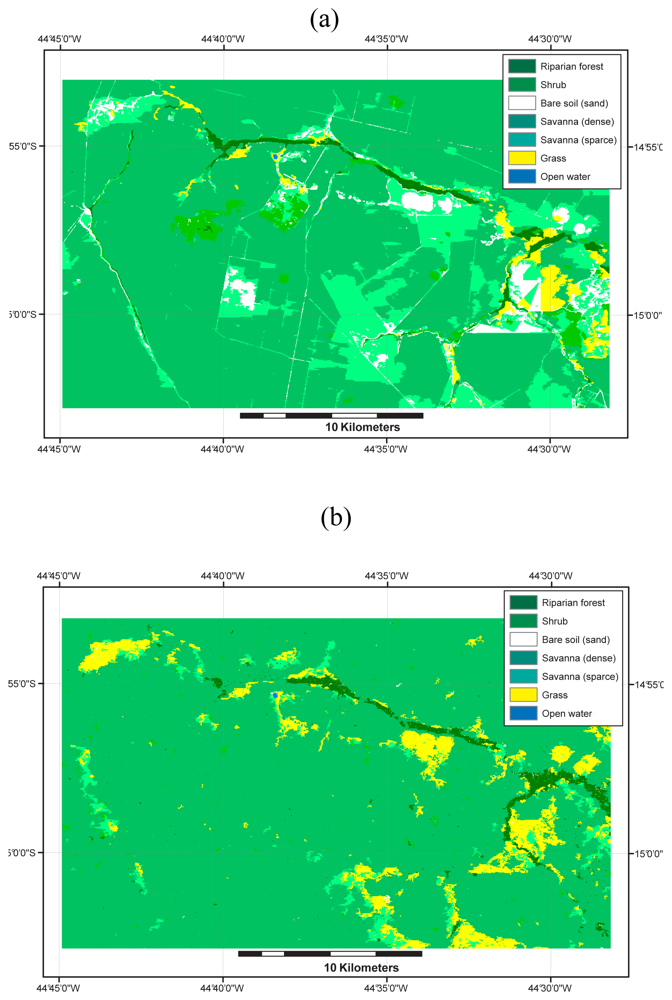
3.2. Classifying the different types
3.3. Comparing the Results
4. Conclusions
Acknowledgments
References
- Mitsch, W.; Gosselink, J. Wetlands.; John Wiley and Sons: New York, NY, USA, 2000. [Google Scholar]
- Roulet, N.T. Peatlands, carbon storage, greenhouse gases and the Kyoto Protocol: prospects and significance for Canada. Wetlands 2000, 20, 605–615. [Google Scholar]
- Drummond, G.M.; Martins, C.S.; Machado, A.B.M.; Sebaio, F.A.; Antonini, Y. Biodiversidade em Minas Gerais: um atlas para sua conservação.; Fundação Biodiversitas: Belo Horizonte, Brazil, 2005. [Google Scholar]
- Boaventura, R. S. Preservação da veredas- síntese. Proceedings of the 2nd latin-american meeting: human-environment relationship, Belo Horizonte, Brazil; 1988; pp. 109–122. [Google Scholar]
- Melo, D.R. As veredas nos planaltos do Noroeste Mineiro; caracterização pedológica e os aspectos morfológicos e evolutivos. Master's thesis, Universidade Estadual Paulista, São Paulo, Brazil, 1992. [Google Scholar]
- Ratter, J.A.; Ribeiro, J.F.; Bridgewater, S. The Brazilian cerrado vegetation and threats to its biodiversity. Ann. Bot. 1997, 80, 223–230. [Google Scholar]
- Baker, C.; Lawrence, R.; Montagne, C.; Patten, D. Mapping wetlands and riparian areas using Landsat ETM+ imagery and decision-tree-based models. Wetlands 2006, 26, 465–474. [Google Scholar]
- Melack, J.M. Tropical freshwater wetlands. In Manual of Remote Sensing, Vol. 4: Remote Sensing for Natural Management and Environmental Monitoring.; JohnWiley and Sons: Hoboken, NJ, USA, 2004; pp. 319–343. [Google Scholar]
- O'Connell, M.J. Detecting, measuring and reversing changes to wetlands. Wetlands Ecol. Manag. 2003, 11, 397–401. [Google Scholar]
- Coleman, T.L.; Fletcher, R.F.; Clerke, W.H. Spectral differentiation of wetland habitats within the Conecuh National Forest. Proceedings of the Fourth Forest Service Remote Sensing Applications Conference, Orlando, Florida, USA, April 1992; pp. 64–74.
- Hewitt, M. Synoptic inventory of riparian ecoystems: The utility of Landsat Thematic Mapper data. For. Ecol. Manag. 1990, 33/34, 605–620. [Google Scholar]
- Johansen, K.; Phinn, S. Mapping structural parameters and species composition of ripirian using IKONOS and Landsat ETM+ data in australian tropical savannahs. Photogramm. Eng. Remote Sens. 2006, 72, 71–80. [Google Scholar]
- Gomes, M.F.; Maillard, P. Comportement spectral saisonnier des formations végétales semi-arides dans la vallée de la rivière Peruaçu - Minas Gerais, Brésil. Proceedings of the XXV Canadian Remote Sensing Symposium, Montreal, QC, Canada, October 2003; Canadian Aeronautics and Space Institute.
- Kasischke, E.S.; Melack, J.M.; Dobson, M.G. The use of imaging radars for ecological applications - a review. Remote Sens. Environ. 1997, 59, 141–156. [Google Scholar]
- Leckie, D.G.; Ranson, K.J. Forestry applications using imaging radar. In Manual of remote sensing, 3rd edition; John Wiley and Sons: New York, NY, 1998; volume 2, pp. 435–509. [Google Scholar]
- Raney, R. Radar fundamentals: technical perspective. In Manual of Remote Sensing, Principles and Aplications of Imaging Radar.; John Wiley and Sons: New York, NY, USA, 1998; volume 2, pp. 9–130. [Google Scholar]
- Ulaby, F.; Sarabandi, K.; McDonald, K.; Whitt, M.; Dobson, M. Microwave Remote Sensing, Active and Passive, volume I: Microwave Remote Sensing Fundamentals and Radiometry.; Addison- Wesley, Reading: MA, USA, 1981. [Google Scholar]
- Freeman, A. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar]
- Townsend, P.A. Mapping seasonal flooding in forested wetlands using multi-temporal RADARSAT SAR. Photogramm. Eng. Remote Sens. 2001, 67, 857–864. [Google Scholar]
- Lo, C.P. Applications of imaging radar to land use and land cover mapping. In Manual of Remote Sensing, vol 2 Principles and Aplications of Imaging Radar.; John Wiley and Sons: New York, NY, USA, 1998; pp. 705–732. [Google Scholar]
- Haack, B.N.; Herold, N.D.; Bechdol, M.A. Radar and optical data integration for land-use/landcover mapping. Photogramm. Eng. Remote Sens. 2000, 66, 709–716. [Google Scholar]
- Huang, H.; Legarsky, J.; Othman, M. Land-cover classification using Radarsat-1 and Landsat imagery for St. Louis, Missouri. Photogramm. Eng. Remote Sens. 2007, 73, 37–43. [Google Scholar]
- Franklin, S.E. Remote Sensing for Sustainable Forest Management.; Lewis Publishers: Boca Raton, Florida, USA, 2001. [Google Scholar]
- Hess, L.L.; Melack, J.M.; Simonett, D.S. Radar detection of flooding beneath the forest canopy - a review. IEEE Trans. Geosci. Remote Sens. 1990, 29, 545–554. [Google Scholar]
- Hess, L.L.; Melack, J.M. Mapping wetland hydrology and vegetation with synthetic aperture radar. Int. J. Ecol.Environ. Sci. 1994, 20, 197–205. [Google Scholar]
- Parmuchi, M.G.; Karszenbaum, H.; Kandus, P. Mapping wetlands using multi-temporal RADARSAT- 1 data and a decision-based classifier. Can. J. Remote Sens. 2002, 28, 175–186. [Google Scholar]
- Kovacs, J.M.; Vanderberg, C.V.; Flores-Verdugo, F. Assessing fine beam RADARSAT-1 backscatter from a white mangrove (Laguncularia racemosa (Gaertner)) canopy. Wetlands Ecol.Manag. 2006, 14, 401–408. [Google Scholar]
- McCabe, M.F.; Wood, E.F. Scale influences on the remote estimation of evapotranspiration using multiple satellite sensors. Remote Sens. Environ. 2006, 105, 271–285. [Google Scholar]
- Blaes, X.; Vanhalleb, L.; Defourny, P. Efficiency of crop identification based on optical and SAR image time series. Remote Sens. Environ. 2005, 96, 352–365. [Google Scholar]
- Hill, M.J.; Ticehurst, C.J.; Lee, J.S.; Grunes, M.R.; Donald, G.E.; Henry, D. Integration of optical and radar classifications for mapping pasture type in Western Australia. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1665–1681. [Google Scholar]
- Deng, H.; Clausi, D.A. Unsupervised segmentation of synthetic aperture radar sea ice imagery using a novel Markov random field models. IEEE Trans. Geosci. Remote Sens. 43, 528–538.
- Maillard, P.; Clausi, D.A.; Deng, H. Operational map-guided classification of sar sea ice imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2940–2951. [Google Scholar]
- Alencar-Silva, T.; Maillard, P. Delineation of palm swamps using segmentation of Radarsat data and spatial knowledge. Proceedings of the ISPRS Annual Conference, Enschede, The Netherland, May 2006.
- Nimer, E.; Brandão, A.M.P.M. Balanço Hídrico e Clima da Região dos Cerrados.; Instituto Brasileiro de Geografia e Estatística – IBGE: Rio de Janeiro, Brazil, 1989. [Google Scholar]
- Töyrä, J.; Pietroniro, A.; Martz, L.W. Multisensor hydrologic assessment of a freshwater wetland. Remote Sens. Environ. 2001, 75, 162–173. [Google Scholar]
- Townsend, P.A. Estimating forest structure in wetlands using multitemporal SAR. Remote Sens. Environ. 2002, 79, 288–304. [Google Scholar]
- Arai, K.; Tonooka, H. Radiometric performance evaluation of ASTER VNIR, SWIR, and TIR. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2725–2732. [Google Scholar]
- Li, S.Z. Markov Random Field Modeling in Computer Vision.; Springer&Verlag: New York, NY, USA, 1995. [Google Scholar]
- Tso, B.; Mather, P. Classification Methods for Remotely Sensed Data.; Taylor and Francis: London, England, 2001. [Google Scholar]
- Geman, D.; Geman, S.; Graffigne, C.; Dong, P. Boundary detection by constrained optimization. IEEE Trans. Pattern Anal. Machine Intell. 1990, 12, 609–628. [Google Scholar]
- Duda, R.O.; Hart, P.E. Pattern Classification and Scene Analysis.; Wiley-Interscience: New York, NY, USA, 2000. [Google Scholar]
- Duda, R.; Hart, P.; Stork, D. Pattern Classification.; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Biehl, L.; Landgrebe, D. Multispec - a tool for multispectral - hyperspectral image data analysis. Comput. Geosci. 2002, 28, 1153–1159. [Google Scholar]
- Foody, G.M. On the compensation for chance agreement in image classification accuracy assessment. Photogramm. Eng. Remote Sens. 1992, 58, 1459–1460. [Google Scholar]
- Foody, G.M. Thematic map comparison: evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens 2004, 70, 627–633. [Google Scholar]
- Sambur, M.R. Selection of accoustic features for speaker identification. IEEE Trans. Accoust. Speech Signal Process. 1975, ASSP 23, 176–182. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class name | Description |
|---|---|
| Grassland | A relatively narrow (<50m) band of grass usually inserted between the savanna and the shrubland or the riparian forest; |
| Shrub | A narrow band of shrub that may or may not be present between the meadow and the trees; |
| Riparian forest | A relatively dense canopy of trees with emerging buriti palms and having a width that can vary from less than fifty meters to a few hundreds of meters; |
| Sparse wooded savanna | A sparse community of small trees (<5m) and shrub with frequent patches of bare soil; |
| Dense wooded savanna | A dense community of small trees (<7m) and shrub with a continuous canopy; |
| Bare soil (sand) | Areas of very little vegetation (usually grasses and some shrub) characterized by loose sand; |
| Open water | Class almost exclusively represented by small lakes but might include some open water areas within the veredas. |
| Vegetation type | Number of samples | Gravimetric moisture |
|---|---|---|
| Wooded savanna | 4 | 4.41% |
| Grassland/wet meadows | 9 | 8.91% |
| Riparian forest | 9 | 59.54% |
| Vereda pixels (489) | Non-vereda pixels (589) | Total (1078) | |
|---|---|---|---|
| April S2 | Overall: | 64.1% | |
| vereda | 236 | 134 | 370 |
| non-vereda | 253 | 455 | 708 |
| April S6 | Overall: | 61.5% | |
| vereda | 271 | 197 | 468 |
| non-vereda | 218 | 392 | 610 |
| Sept. S2 | Overall: | 62.2% | |
| vereda | 280 | 199 | 479 |
| non-vereda | 209 | 390 | 599 |
| Sept. S6 | Overall: | 62.0% | |
| vereda | 178 | 99 | 277 |
| non-vereda | 311 | 490 | 801 |
| Vereda pixels (405) | Non-vereda pixels (672) | Total (1077) | |
|---|---|---|---|
| April S2 | Overall: | 69.2% | |
| vereda | 222 | 149 | 371 |
| non-vereda | 183 | 523 | 706 |
| April S6 | Overall: | 64.7% | |
| vereda | 248 | 223 | 471 |
| non-vereda | 157 | 449 | 606 |
| Sept. S2 | Overall: | 65.3% | |
| vereda | 255 | 224 | 479 |
| non-vereda | 209 | 390 | 599 |
| Sept. S6 | Overall: | 66.1% | |
| vereda | 159 | 119 | 278 |
| non-vereda | 246 | 553 | 799 |
| Grassland included | Grassland excluded | |||||
|---|---|---|---|---|---|---|
| April S6 | Sept. S2 | Sept. S6 | April S6 | Sept. S2 | Sept. S6 | |
| April S2 | 1.1826 | 0.8705 | 1.5416 | 2.3570 | 2.3438 | 2.2156 |
| April S6 | - | 0.4048 | 0.2941 | - | 0.2882 | 0.2349 |
| Sept. S2 | - | - | 0.7047 | - | - | 0.0586 |
| Rank | Feature | Kappa (k̂) | Feature used (by rank) |
|---|---|---|---|
| 1 (most useful) | VNIR 1 (green) | 61,1% | 1 |
| 2 | VNIR 3 (near infrared) | 68,9% | 1 2 |
| 3 | SAR April S2 | 71,0% | 1 2 3 |
| 4 | SAR April S6 | 72,2% | 1 2 3 4 |
| 5 | VNIR 2 (red) | 71,8% | 1 2 3 4 5 |
| 6 | SAR September S6 | 67,4% | 1 2 3 4 5 6 |
| 7 | SAR September S2 | 61,9% | 1 2 3 4 5 6 7 |
| 8 | SWIR 3 | 59,5% | 1 2 3 4 5 6 7 8 |
| 9 | SWIR 2 | 59,1% | 1 2 3 4 5 6 7 8 9 |
| 10 (least useful) | SWIR 5 | 56,6% | 1 2 3 4 5 6 7 8 9 10 |
| Samples | VNIR | VNIR and SWIR(3) | VNIR and SAR (April) | SAR (all 4) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Class | (n) | P% | U% | P% | U% | P% | U% | P% | U% |
| Grassland | 48 | 77.1 | 64.9 | 68.8 | 57.9 | 68.8 | 62.3 | 62.5 | 30.9 |
| Shrubland | 60 | 21.7 | 56.5 | 23.3 | 60.9 | 15.0 | 69.2 | 6.7 | 5.8 |
| Riparian forest | 176 | 84.1 | 84.1 | 84.1 | 69.5 | 83.5 | 87.5 | 84.7 | 87.1 |
| Savanna (sparse) | 50 | 78.0 | 68.4 | 28.0 | 41.2 | 96.0 | 69.6 | 50.0 | 32.9 |
| Savanna (dense) | 180 | 87.8 | 81.9 | 67.2 | 77.1 | 88.9 | 83.3 | 39.4 | 54.2 |
| Bare soil (sand) | 42 | 90.5 | 76.0 | 90.5 | 52.8 | 92.9 | 57.4 | 4.8 | 9.1 |
| Open water | 23 | 100.0 | 100.0 | 100.0 | 100.0 | 69.6 | 100.0 | 56.5 | 100.0 |
| Overall success | 78.8 | 67.5 | 78.1 | 50.8 | |||||
| Kappa (k̂) | 75.2 | 58.2 | 71.8 | 42.8 | |||||
| Vegetation | April | September | ||
|---|---|---|---|---|
| S2% | S6% | S2% | S6% | |
| Grassland | 38.2 | 30.8 | 31.6 | 17.7 |
| Shrub | 28.6 | 37.4 | 30.3 | 31.8 |
| Riparian forest | 76.4 | 77.7 | 78.0 | 64.7 |
| Sparse savanna | 11.3 | 11.4 | 9.8 | 9.2 |
| Dense savanna | 13.6 | 10.4 | 20.5 | 28.0 |
| Bare soil | 14.9 | 7.5 | 8.0 | 4.8 |
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Maillard, P.; Alencar-Silva, T.; Clausi, D.A. An Evaluation of Radarsat-1 and ASTER Data for Mapping Veredas (Palm Swamps). Sensors 2008, 8, 6055-6076. https://doi.org/10.3390/s8096055
Maillard P, Alencar-Silva T, Clausi DA. An Evaluation of Radarsat-1 and ASTER Data for Mapping Veredas (Palm Swamps). Sensors. 2008; 8(9):6055-6076. https://doi.org/10.3390/s8096055
Chicago/Turabian StyleMaillard, Philippe, Thiago Alencar-Silva, and David A. Clausi. 2008. "An Evaluation of Radarsat-1 and ASTER Data for Mapping Veredas (Palm Swamps)" Sensors 8, no. 9: 6055-6076. https://doi.org/10.3390/s8096055