1. Introduction
Diurnal variation is one of the dominant components in the variation of sea surface temperature (SST). Although the diurnal SST variation has often been neglected in oceanography and meteorology, recently many researchers are giving it greater attention (for a review see [
1]). For example, Clayson and Chen [
2] investigated the effect of the diurnal SST variation on the atmosphere during the Tropical Ocean Global Atmosphere/Coupled Ocean-Atmosphere Response Experiment (TOGA/COARE) using a coupled single-column model. They showed that the diurnal variation could change the vertical profiles of air temperature, moisture content, and abundance of clouds. Johnson
et al. [
3] analyzed atmospheric sounding data from TOGA/COARE and found that large ranges in diurnal SST cycles caused diurnal cycles in the atmospheric mixed layer on calm days. The inclusion of the upper-ocean diurnal cycle in a coupled ocean-atmosphere general circulation model affected the predictive ability of the model and the predicted strength of the Madden-Julian Oscillation [
4,
5]. Yasunaga
et al. [
6] showed that observed afternoon increases in precipitable water and radar echo coverage corresponded to large diurnal rises of skin SST (SST
skin) in the tropical Indian Ocean. However, they also indicated that the increase in latent heat flux could not account for the increase in precipitable water. The processes by which the diurnal SST variation affects the atmosphere have not yet been clarified, and observational studies along with model studies are still indispensable. However, there can be problems with one of the most common measurements in oceanography–the
in situ SST–when the diurnal surface warming is strong.
Currently five kinds of SST are strictly defined (see
Table 1 in [
1]) to encourage reporting of the measurement depth along with the temperature because the temperature can change drastically with depth when a diurnal thermocline forms. Most
in situ observations reported as “SST” are in fact temperatures at depth (SST
depth), which were observed at depths of 1 m or greater. Large diurnal SST increases are always accompanied by a shallow diurnal thermocline, which can be shallower than 1 m under strong warming conditions. Hence, it is necessary to know the detailed vertical temperature structure near the surface, and not only SST
depth, to investigate the air-sea interactions associated with diurnal SST variation. However, previous research [
7,
8] suggested that the temperature field around surface buoys, such as those used for measuring
in situ SST, might be distorted by the buoy hull, because buoy-observed temperatures at depths of 1 m or 1.5 m were too high compared with the values estimated from the surface heat budget when a diurnal thermocline formed. Since the authors did not determine the two-dimensional temperature structure around a buoy hull, they could not confirm this hypothesis completely.
In this study we attached additional recording thermometers to specific locations on the hull of a moored buoy to obtain detailed measurements of seawater temperatures around the hull and to determine whether the temperature field around the hull was distorted. This study is necessary to allow accurate measurements of diurnal SST variations, and to improve the estimation of the air-sea heat flux.
2. Method
The Japan Agency for Marine-Earth Science and Technology (JAMSTEC) deploys and maintains the moored buoys of the Triangle Trans-Ocean buoy Network (TRITON) in the western tropical Pacific and the eastern Indian Oceans. The hull of the TRITON buoy has a diameter of 2.4 m (
Figure 1). A conductivity/temperature (CT) sensor for standard SST measurement is installed on the bottom of the buoy hull at 1.5 m depth. This is referred to as SST
1.5m. The buoy has a 2.3 m high tower equipped with meteorological sensors for wind speed and direction, air temperature, relative humidity, atmospheric pressure, shortwave radiation, and precipitation [
8]. Since the TRITON buoys do not observe downward longwave radiation, we used an empirical bulk formula (see Appendix in [
9]) to estimate longwave radiation for use in calculating SST
skin in Section 3.3.
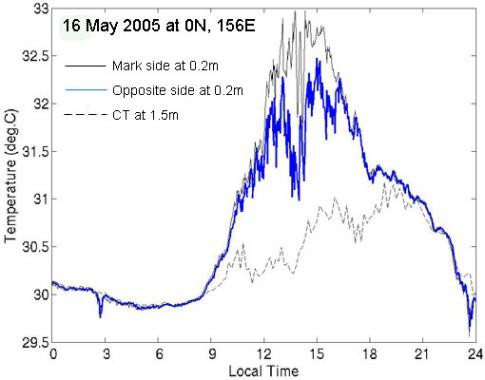
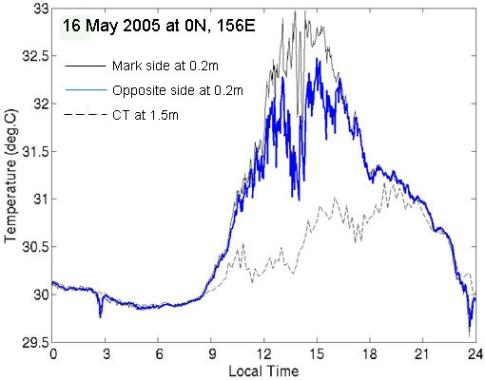
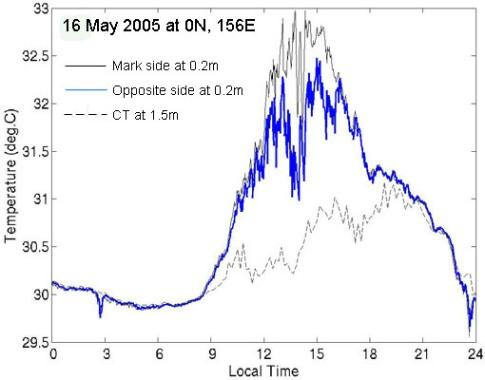
In addition to the regular CT sensor, we installed four small thermometers on the hull of a buoy that was deployed at 0°N, 156°E for about one year beginning in February 2005 (one thermometer stopped working on 1 June 2005). Each extra thermometer contained a thermistor, a data logger, and a battery. The thermometer types and their locations on the buoy are summarized in
Table 1 and shown in
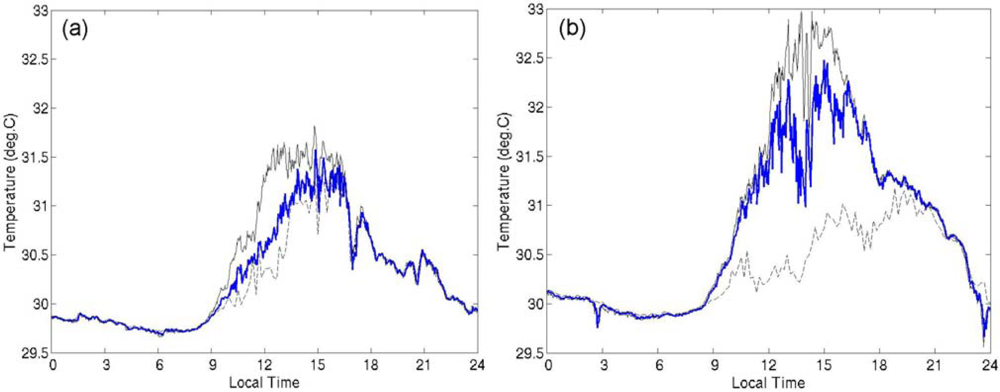
Figure 2. One of the four was of a different type and its measurement interval was 15 min., whereas the others were able to record temperatures every 2 minutes because of their higher logger capacities. Two thermometers were attached to the side of the hull at 0.2 m depth, and the other two were on the bottom of the hull at 1.5 m depth. One of the upper two thermometers on the side of the hull with the JAMSTEC logo (“mark” side), and the other was on the exact opposite side (“opposite” side) (
Figure 2). To protect the thermometers from shocks and direct insolation, they were enclosed in small stainless-steel containers with holes. We calibrated all of the thermometers against a standard, and confirmed that they were all accurate to within ±0.05 K.
4. Summary and Conclusions
With the current interest in the effects of diurnal sea surface warming on the atmosphere, there is a strong need for precise near-surface temperature measurements. Previous studies have suggested that the accuracy of temperature measurements by surface-moored buoys may be affected by distortions of the near-surface temperature structure by the buoy hull on calm, sunny days when a sharp thermocline forms at depths of less than a few meters. However, this has not been confirmed by field observations. We attached special recording thermometers to the hull of a TRITON buoy to monitor the temperature field around the buoy hull. Our observations confirmed that the temperatures field around the hull was not horizontally homogeneous at the same nominal depth, primarily when the diurnal surface warming was large. Although it was not possible to identify the reason for this inhomogeneity or to determine the detailed three-dimensional temperature structure around the hull, this result corroborates the suggestion that buoy hull distorts the temperature field.
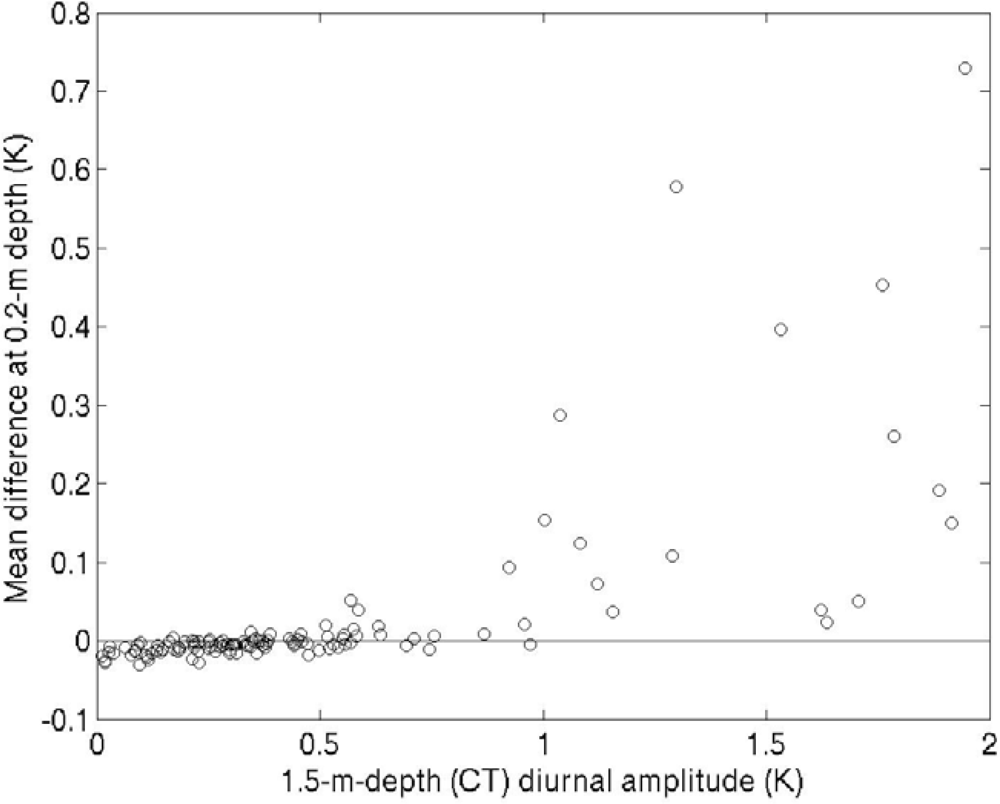
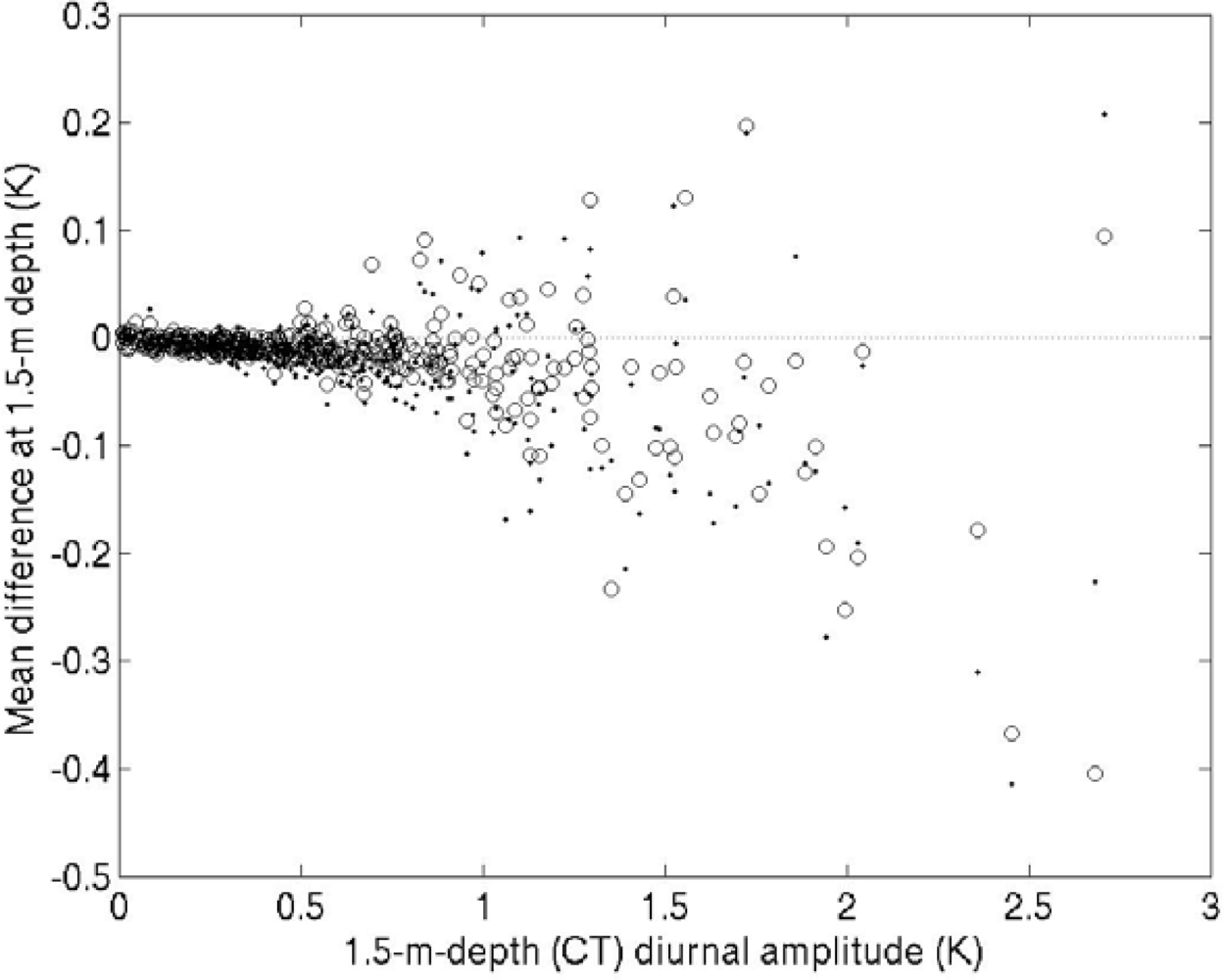
Our observations show that the uncertainty in the
in situ SST measurements needs not to be considered in most cases (
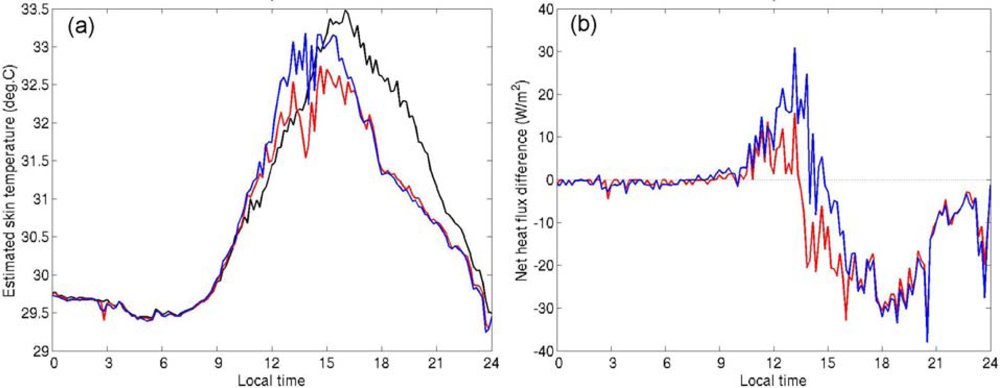
Figure 9). If the diurnal warming is small enough, the spatial temperature differences are less than the accuracy of the thermometer, and the difference in the estimated heat flux is also negligible. However, when the diurnal amplitude of the CT temperature is greater than or equal to about 1.0 K, the difference between the net heat flux estimated from the CT temperature and that from the temperature at 0.2 m can exceed 20 Wm
−2. Although this difference does not affect mean heat-flux estimates on a time scale of several days or more because it arises only during certain limited periods (
Figure 9), this is not always negligible when quantitatively evaluating the effect of diurnal SST warming on the atmosphere [
2–
5].
The differences in the estimated value for SST
skin (
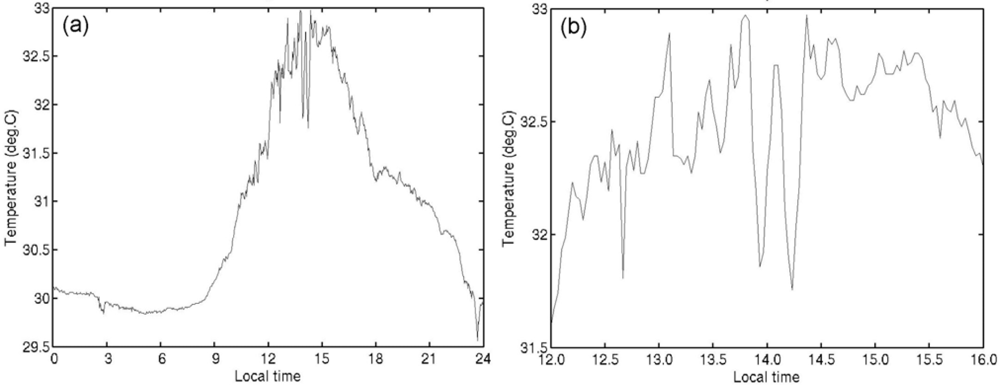
Figure 8a) and the short-term fluctuations in temperature described in Section 3.1 are not negligible for the validation of satellite SSTs. These fluctuations might also be associated with the presence of the buoy hull. When the diurnal warming is strong, the temperature difference due to a time lag in a satellite-
in situ matchup can exceed 0.5 K, which is the typical random error of satellite-derived SST, even if the time difference is less than one hour (
Figure 3). A matchup of observations within a time interval of about 10 minutes or less would be desirable for the validation of satellite SST.
This study was not intended to invalidate the use of the TRITON buoy for surface observations, but rather our results should provide useful insights when developing moored buoys and other platforms that specialize in observations of heat flux and air-sea interactions associated with diurnal SST warming. The distortion of the surface temperature field is expected to depend on the size and shape of the buoy hull. Some types of moored buoy have large hulls. For example, the hull of the National Data Buoy Center (NDBC) discus buoys are 3, 10, or 12 m in diameter, larger than the TRITON buoy hulls. NDBC has also 6 m boat-shaped hulls (
http://www.ndbc.noaa.gov/mooredbuoy.shtml). It will be necessary to examine the effect of each type of buoy hull on the surface temperature field for the exact
in situ temperature measurements and heat flux estimates.
The best method to measure near-surface temperature accurately without disturbing the temperature field is to use a carefully designed profiling float that ascends slowly. Ward
et al. [
13] developed an autonomous profiler named the “Skin Depth Experimental Profiler (SkinDeEP)”, which had thin temperature sensors that protruded 47 cm from the top of the body to avoid distorting the near-surface stratification. We will be also able to utilize the Argo floats, which have been deployed over the whole oceans, to measure SST accurately by improving their temperature sensor and sampling scheme. Such kinds of instrument will be useful for research on air-sea interaction associated with the diurnal variation.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}