
Analysis of Dynamic Characteristic for Solar Arrays in Series and Global Maximum Power Point Tracking Based on Optimal Initial Value Incremental Conductance Strategy under Partially Shaded Conditions

Abstract
:1. Introduction
2. Dynamic Characteristic of Solar Array in Series
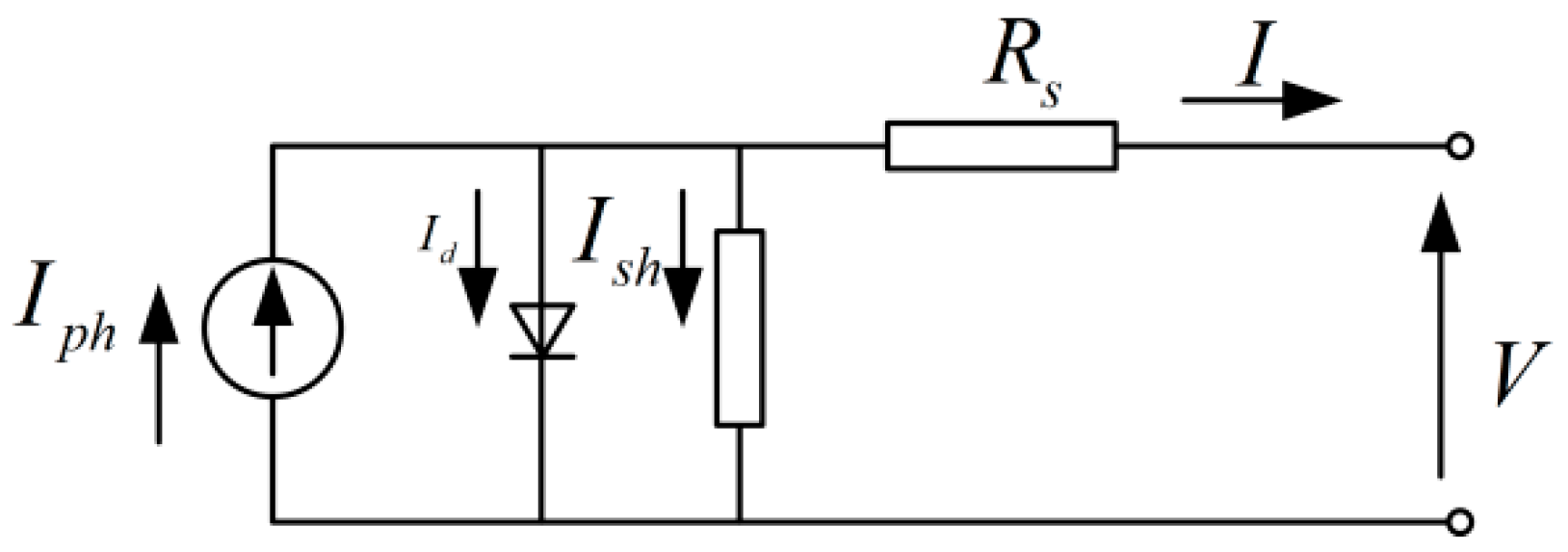
2.1. Photovoltaic (PV) Panel Model
2.2. Sufficient and Necessary Condition of Multiple-Peak
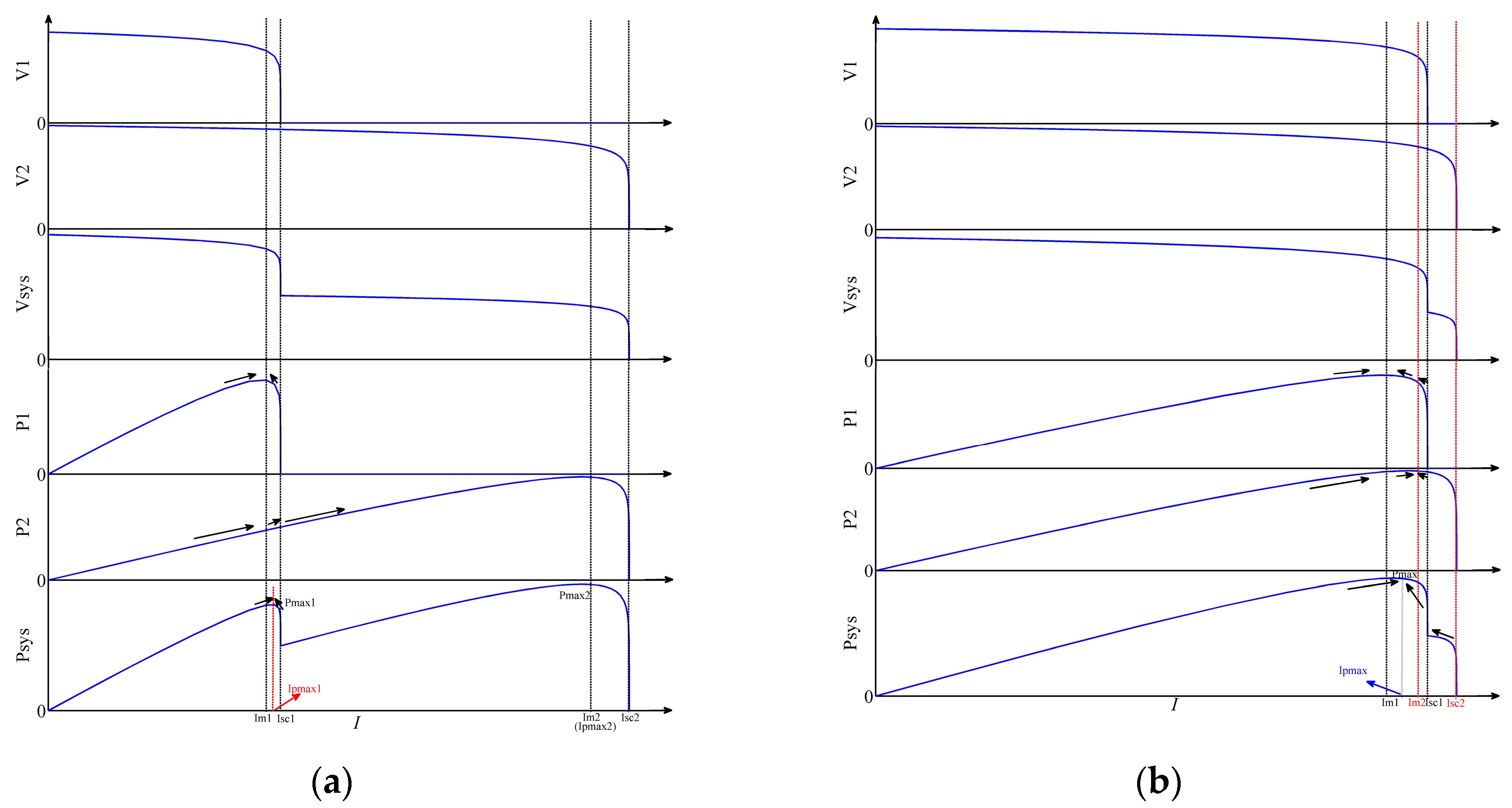
2.3. Zone of the Global Maximum Power Point (GMPP)
2.4. Relationship between and Operating Parameters
2.5. Relationship between and Environment Parameters
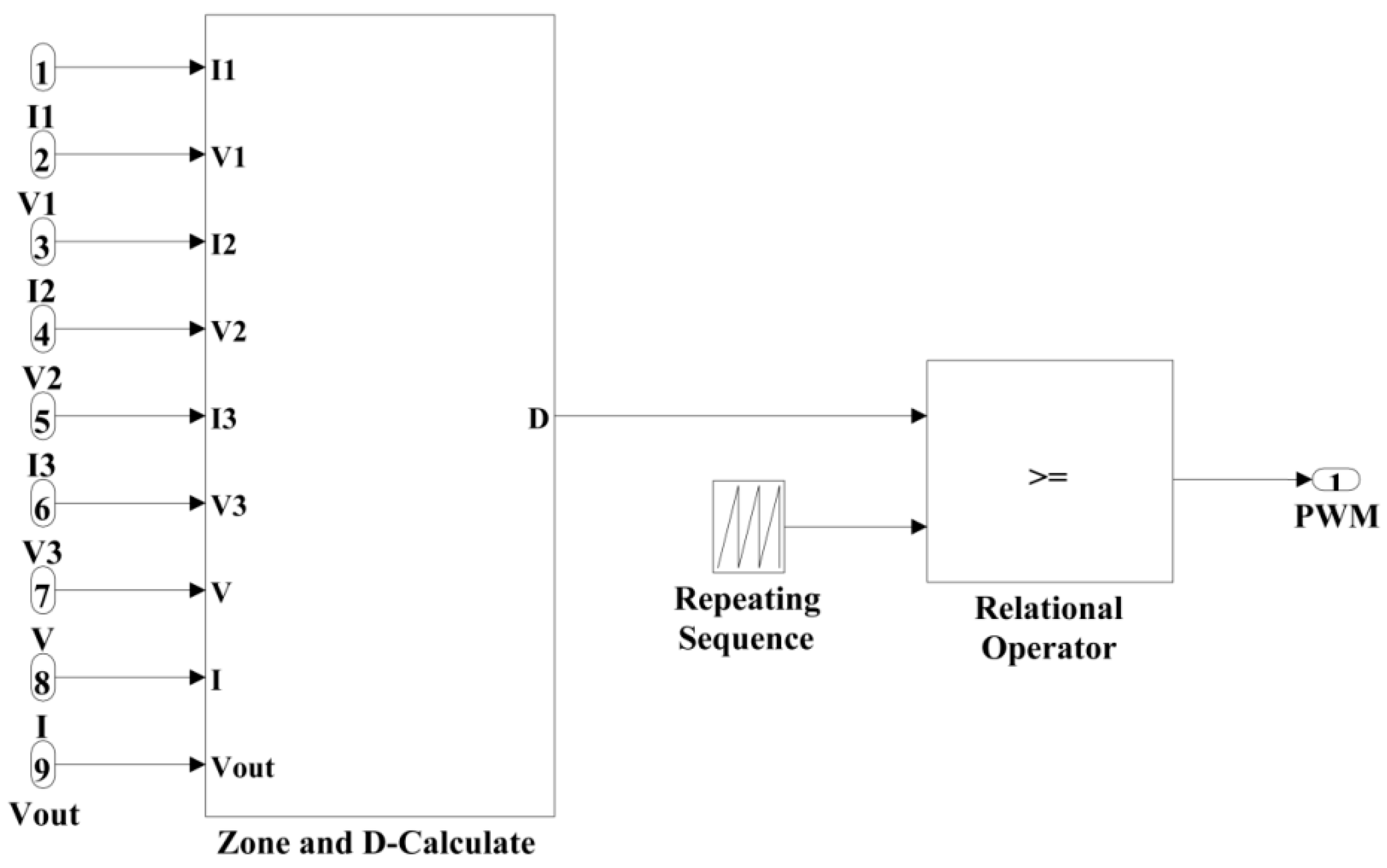
3. Proposed GMPPT Control Strategy
- (1)
- When is outside of the zone of -, the error between and is large (i.e., the operating point is far from the GMPP), the change in the duty cycle is large, and it reaches the GMPP zone rapidly.
- (2)
- When is within the zone of - which is narrowly bound (i.e., the operating point is near GMPP), the INC method with small step is adopted to make the operating point approach the GMPP rapidly and accurately. Then, the change in the duty cycle is small to avoid the oscillation at GMPP.
- (3)
- When the environmental conditions change and the zone of - goes with it, if is still within the new zone of GMPP (B-7), the INC method will find the GMPP actively, rapidly and accurately (B-8). If is outside of the new zone of the GMPP, the change in the duty cycle is large, and reaches the GMPP zone rapidly (B-9). Namely, the proposed GMPPT control method has stronger robustness and adaptability.
4. Results and Discussion
4.1. Experiment for Calculating
4.2. Analysis and Discussion of the Simulation Results
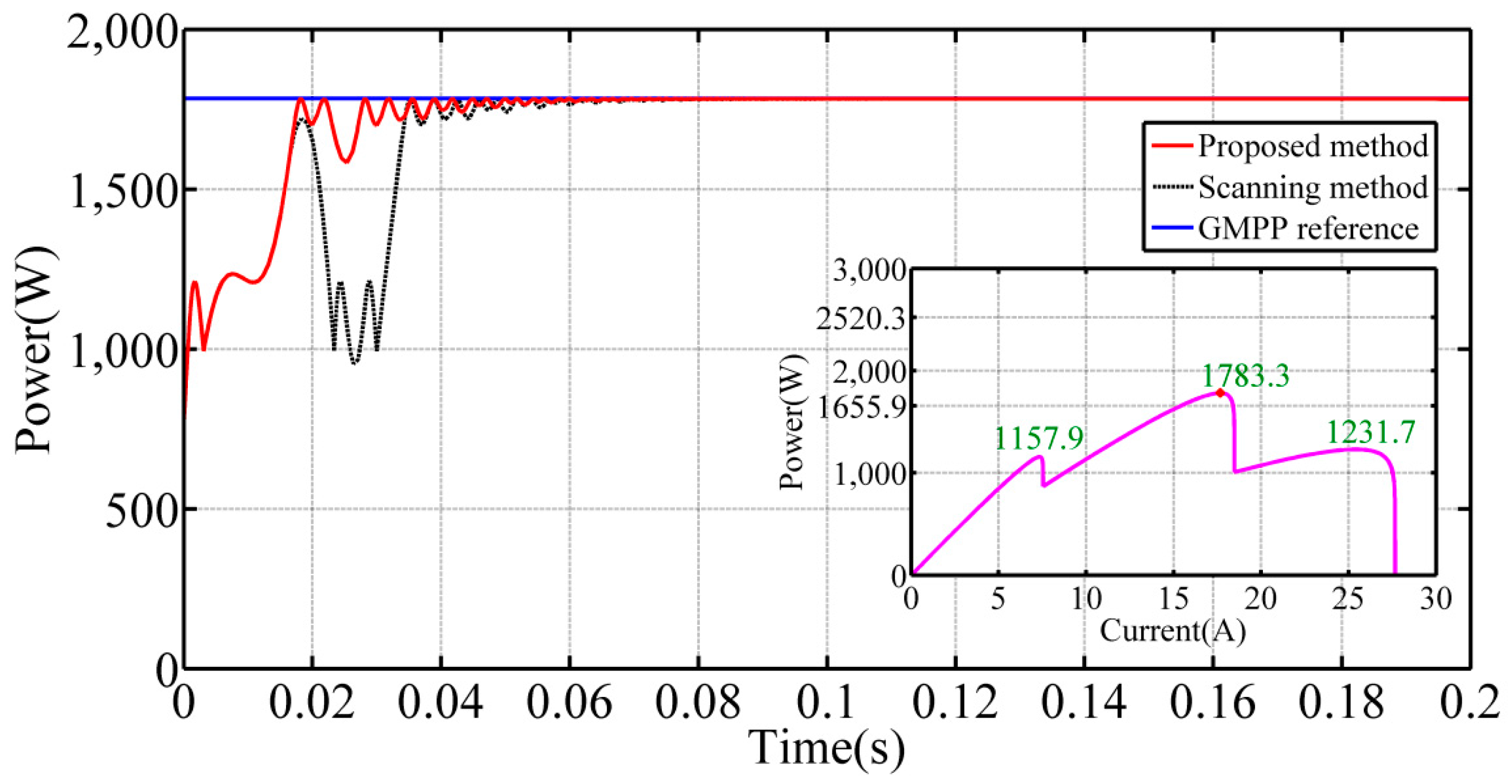
4.2.1. Partial Shading Condition
4.2.2. Fast Variations of the Solar Array Temperature and Solar Irradiance as Well as Partial Shading Conditions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| PV | Photovoltaic |
| GMPPT | Global Maximum Power Point Tracking |
| LMPP | Local Maximum Power Point |
| MPP | Maximum Power Point |
| PSC | Partial Shading Condition |
| INC | Incremental Conductance |
| OIV | Operation Initial Value |
| OIV-INC | Optimal Initial Value Incremental Conductance |
References
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; de Azevedo e Melo, G.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Horan, B.; Rahmani, R.; Oo, A.M.T.; Stojcevski, A. Efficient photovoltaic system maximum power point tracking using a new technique. Energies 2016, 9, 147. [Google Scholar] [CrossRef]
- Sullivan, C.R.; Awerbuch, J.J.; Latham, A.M. Decrease in photovoltaic power output from ripple: Simple general calculation and the effect of partial shading. IEEE Trans. Power Electron. 2013, 28, 740–747. [Google Scholar] [CrossRef]
- Piegari, L.; Rizzo, R.; Spina, I.; Tricoli, P. Optimized adaptive perturb and observe maximum power point tracking control for photovoltaic generation. Energies 2015, 8, 3418–3436. [Google Scholar] [CrossRef]
- Lee, J.-S.; Lee, K.B. Variable DC-link voltage algorithm with a wide range of maximum power point tracking for a two-string PV system. Energies 2013, 6, 58–78. [Google Scholar] [CrossRef]
- Yau, H.T.; Wu, C.H. Comparison of extremum-seeking control techniques for maximum power point tracking in photovoltaic systems. Energies 2011, 4, 2180–2195. [Google Scholar] [CrossRef]
- Wasynczuk, O. Dynamic behavior of a class of photovoltaic power systems. IEEE Trans. Power Appar. Syst. 1983, 9, 3031–3037. [Google Scholar] [CrossRef]
- Teulings, W.J.A.; Marpinard, J.C.; Capel, A.; O’Sullivan, D. A new maximum power point tracking system. In Proceedings of the 24th Annual IEEE Power Electronics Specialists Conference, Seattle, WA, USA, 20–24 June 1993; pp. 833–838.
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Yang, B.; Li, W.; Zhao, Y.; He, X. Design and analysis of a grid connected photovoltaic power system. IEEE Trans. Power Electron. 2010, 25, 992–1000. [Google Scholar] [CrossRef]
- Zegaoui, A.; Aillerie, M.; Petit, P.; Sawicki, J.P.; Charles, J.P.; Belarbi, A.W. Dynamic behavior of PV generator trackers under irradiation and temperature changes. Sol. Energy 2011, 85, 2953–2964. [Google Scholar] [CrossRef]
- Petrone, G.; Spagnuolo, G.; Vitelli, M. A multivariable perturb-and-observe maximum power point tracking technique applied to a single-stage photovoltaic inverter. IEEE Trans. Ind. Electron. 2011, 58, 76–84. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G. A Modified Adaptive hill climbing MPPT Method for photovoltaic power systems. In Proceedings of the Power Electronics specialists Conference, Aachen, Germany, 20–25 June 2004; pp. 1957–1963.
- Salas, V.; Barrado, A. Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems. Sol. Energy Mater. Sol. Cells 2006, 90, 1555–1578. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Zhou, X.; Song, D.; Ma, Y.; Chen, D. The simulation and design for MPPT of PV system based on incremental conductance method. In Proceedings of the 2010 WASE International Conference on Information Engineering (ICIE), Beidaihe, China, 14–15 August 2010; pp. 314–317.
- Kish, G.J.; Lee, J.J.; Lehn, P.W. Modeling and control of photovoltaic panels utilizing the incremental conductance method for maximum power point tracking. IET Renew. Power Gener. 2012, 6, 259–266. [Google Scholar] [CrossRef]
- Chaouachi, A.; Kamel, R.M.; Nagasaka, K. A novel multi-model neuro-fuzzy-based MPPT for three-phase grid-connected photovoltaic system. Sol. Energy 2010, 84, 2219–2229. [Google Scholar] [CrossRef]
- Messai, A.; Mellit, A.; Guessoum, A.; Kalogirou, S.A. Maximum power point tracking using a GA optimized fuzzy logic controller and its FPGA implementation. Sol. Energy 2011, 85, 265–277. [Google Scholar] [CrossRef]
- Rajesh, R.; Mabel, M.C. Efficiency analysis of a multi-fuzzy logic controller for the determination of operating points in a PV system. Sol. Energy 2014, 99, 77–87. [Google Scholar] [CrossRef]
- Mutoh, N.; Ohno, M.; Inoue, T. A method for MPPT control while searching for parameters corresponding to weather conditions for PV generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1055–1065. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, X.; Ma, Y.; Liu, W. A novel maximum power point tracking strategy based on optimal voltage control for photovoltaic systems under variable environmental conditions. Sol. Energy 2015, 122, 640–649. [Google Scholar] [CrossRef]
- Salam, Z.; Ahmed, J.; Merugu, B.S. The application of soft computing methods for MPPT of PV system: A technological and status review. Appl. Energy 2013, 107, 135–148. [Google Scholar] [CrossRef]
- Patel, H.; Agarwal, V. Maximum power point tracking scheme for PV systems operating under partially shaded conditions. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar] [CrossRef]
- Anula, K.; Saroj, R. A review of particle swarm optimization and its applications in solar photovoltaic system. Appl. Soft Comput. 2013, 13, 2997–3006. [Google Scholar]
- Liu, Y.; Liu, C.; Huang, J.; Chen, J. Neural-network based maximum power point tracking methods for photovoltaic systems operating under fast changing environments. Sol. Energy 2013, 89, 42–53. [Google Scholar] [CrossRef]
- Kotti, R.; Shireen, W. Efficient MPPT control for PV systems adaptive to fast changing irradiation and partial shading conditions. Sol. Energy 2015, 114, 397–407. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Mekhilef, S.; Rahmani, R.; Yusof, R.; Shojaei, A.A. Maximum power point tracking of partial shaded photovoltaic array using an evolutionary algorithm: A particle swarm optimization technique. J. Renew. Sustain. Energy 2014, 6. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Rahmani, R.; Mekhilef, S.; Than Oo, A.M.; Stojcevski, A.; Tey Kok, S. Simulation and hardware implementation of new maximum power point tracking technique for partially shaded PV system using hybrid DEPSO method. IEEE Trans. Sustain. Energy 2015, 6, 850–862. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Horan, B.; Soon, T.K.; Rahmani, R.; Than Oo, A.M.; Mekhilef, S. State of the art artificial intelligence-based MPPT techniques for mitigating partial shading effects on PV systems—A review. Renew. Sustain. Energy Rev. 2016, 64, 435–455. [Google Scholar] [CrossRef]
- Raja, B.; Kumar, M.R.S.; Vikash, S.; Hariharan, K. Maximum power point tracking in solar panels under partial shading condition using equilibration algorithm. In Proceedings of the International Conference on Communication and Signal Processing, Melmaruvathur, India, 6–8 April 2016; pp. 2073–2077.
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; William, B.W. A maximum power point tracking technique for partially shaded photovoltaic systems in Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- Manganiello, P.; Balato, M.; Vitelli, M. A survey on mismatching and aging of pv modules: The closed loop. IEEE Trans. Ind. Electron. 2015, 62, 7276–7286. [Google Scholar] [CrossRef]
- Balato, M.; Costanzo, L.; Vitelli, M. Reconfiguration of PV modules: A tool to get the best compromise between maximization of the extracted power and minimization of localized heating phenomena. Sol. Energy 2016, 138, 105–118. [Google Scholar] [CrossRef]
- Balato, M.; Costanzo, L.; Vitelli, M. Series-parallel PV array re-configuration: Maximization of the extraction of energy and much more. Appl. Energy 2015, 159, 145–160. [Google Scholar] [CrossRef]
- Bratcu, A.I.; Munteanu, I.; Bacha, S.; Picault, D.; Raison, B. Cascaded DC-DC converter photovoltaic systems: Power optimization issues. IEEE Trans. Ind. Electron. 2011, 58, 403–411. [Google Scholar] [CrossRef]
- Gao, X.; Li, S.; Gong, R. Maximum power point tracking control strategies with variable weather parameters for photovoltaic generation systems. Sol. Energy 2013, 93, 357–367. [Google Scholar] [CrossRef]
- Li, S.; Gao, X.; Wang, L.; Liu, S. A novel maximum power point tracking control method with variable weather parameters for photovoltaic systems. Sol. Energy 2013, 97, 529–536. [Google Scholar] [CrossRef]
- Li, S. A MPPT control strategy with variable weather parameter and no DC/DC converter for photovoltaic systems. Sol. Energy 2014, 108, 117–125. [Google Scholar] [CrossRef]
- Su, J.; Yu, S.; Zhao, W. Investigation on engineering analytical model of silicon solar cells. Acta Energiae Sol. Sin. 2001, 22, 409–412. [Google Scholar]
- Hajighorbani, S.; Radzi, M.A.M.; Kadir, M.Z.A.A.; Shafie, S.; Zainuri, M.A.A.M. Implementing a novel hybrid maximum power point tracking technique in DSP via Simulink/MATLAB under partially shaded conditions. Energies 2016, 9. [Google Scholar] [CrossRef]
- Salameh, Z.M.; Borowy, B.S.; Amin Atia, R.A. Photovoltaic module-site matching based on the capacity factors. IEEE Trans. Energy Convers. 1995, 10, 326–332. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Li, Y. A rapid tracking method of maximum power point for solar units in series under uneven solar irradiance. Proc. CSEE 2015, 35, 4870–4878. [Google Scholar]
- Mohammad, A.M.S.; Masoum, H.D.; Ewald, F.F. Theoretical and experimental analyses of photovoltaic systems with voltage and current-based maximum power point tracking. IEEE Trans. Energy Convers. 2002, 17, 514–522. [Google Scholar]
- Bletterie, B.; Bruendlinger, R.; Spielauer, S. Quantifying dynamic MPPT performance under realistic conditions first test results—The way forward. In Proceedings of the 21st European Photovoltaic Solar Energy Conference, Dresden, Germany, 4–8 September 2006.
- Valentini, M.; Raducu, A.; Sera, D.; Teodorescu, R. PV inverter test setup for european efficiency, static and dynamic MPPT efficiency evaluation. In Proceedings of the 11th International Conference Optimization of Electrical and Electronic Equipment, Brasov, Romania, 22–24 May 2008; pp. 433–438.
- Haeberlin, H.; Schaerf, P. New procedure for measuring dynamic MPP-Tracking efficiency at grid-connected PV inverters. In Proceedings of the 24th EUPV Solar Energy Conference, Hamburg, Germany, 21–25 September 2009.
- Boukenoui, R.; Salhi, H.; Bradai, R.; Mellit, A. A new intelligent MPPT method for stand-alone photovoltaic systems operating under fast transient variations of shading patterns. Sol. Energy 2016, 124, 124–142. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/1000 W/m2 | 0.92–1 | 0.9–1 | 0.8–1 | 0.7–1 | 0.6–1 | 0.5–1 | 0.4–1 | 0.3–1 | 0.2–1 | 0.1–1 |
|---|---|---|---|---|---|---|---|---|---|---|
| Qty of LMPPs | 1 | 2 | 3 | 5 | 7 | 9 | 11 | 15 | 20 | 28 |
| Typical Values of | ||||||
|---|---|---|---|---|---|---|
| 2 LMPPs | = 0.444 | |||||
| 3 LMPPs | = 0.643 | = 0.286 | = 0.444 | |||
| 4 LMPPs | = 0.737 | = 0.474 | = 0.211 | = 0.643 | = 0.286 | = 0.444 |
| q LMPPs | ||||||
| Data Source | Tair/°C Measure | V/(V) Measure | I/(A) Measure | S/(W/m2) Measure | S*/(W/m2) Calculation | Ipmax/A Calculation | Vm/(V) Calculation |
|---|---|---|---|---|---|---|---|
| Our Experiments | 23.1 | 26.9967 | 6.1059 | 736 | 714.5 | 6.1582 | 26.7303 |
| 20.5 | 27.4139 | 5.7897 | 722 | 689.7 | 5.8927 | 26.8796 | |
| 17.4 | 26.9980 | 6.1058 | 740 | 714.7 | 5.8927 | 26.8796 | |
| Wang et al. Experiments (Table 1) [43] | 4 | 33.5 | 2.58 | - | 636.9 | 2.4637 | 34.5610 |
| 4 | 32.3 | 2.55 | - | 609.7 | 2.3552 | 34.3800 | |
| 4 | 30.7 | 0.95 | - | 239.3 | 0.9094 | 31.6823 | |
| 4 | 31.5 | 2.19 | - | 522.5 | 2.0095 | 33.7844 |
| Figure 14 0 ≤ t ≤ 0.8 | Figure 16 0 ≤ t ≤ 0.8 | Figure 14 0.3 ≤ t ≤ 0.5 | Figure 16 0.3 ≤ t ≤ 0.5 | Figure 14 0.5 ≤ t ≤ 0.8 | Figure 16 0.5 ≤ t ≤ 0.8 | |
|---|---|---|---|---|---|---|
| (W s) | 1482.55 | 1217.962 | 291.56 | 293.002 | 311.99 | 328.76 |
| (W s) | 1430.415 | 1188.288 | 280.93 | 284.431 | 297.446 | 317.765 |
| (W s) | 1495.306 | 1230.1 | 292.9044 | 295.59 | 313.306 | 330.05 |
| 99.15% | 99.01% | 99.54% | 99.124% | 99.58% | 99.609% | |
| 95.66% | 96.6% | 95.91% | 96.224% | 94.938% | 96.2% |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhou, X.; Ma, Y.; Liu, Y. Analysis of Dynamic Characteristic for Solar Arrays in Series and Global Maximum Power Point Tracking Based on Optimal Initial Value Incremental Conductance Strategy under Partially Shaded Conditions. Energies 2017, 10, 120. https://doi.org/10.3390/en10010120
Zhao J, Zhou X, Ma Y, Liu Y. Analysis of Dynamic Characteristic for Solar Arrays in Series and Global Maximum Power Point Tracking Based on Optimal Initial Value Incremental Conductance Strategy under Partially Shaded Conditions. Energies. 2017; 10(1):120. https://doi.org/10.3390/en10010120
Chicago/Turabian StyleZhao, Jian, Xuesong Zhou, Youjie Ma, and Yiqi Liu. 2017. "Analysis of Dynamic Characteristic for Solar Arrays in Series and Global Maximum Power Point Tracking Based on Optimal Initial Value Incremental Conductance Strategy under Partially Shaded Conditions" Energies 10, no. 1: 120. https://doi.org/10.3390/en10010120