Minimization of Load Variance in Power Grids—Investigation on Optimal Vehicle-to-Grid Scheduling

 ,
,  ,
,  and
and
Abstract
:1. Introduction
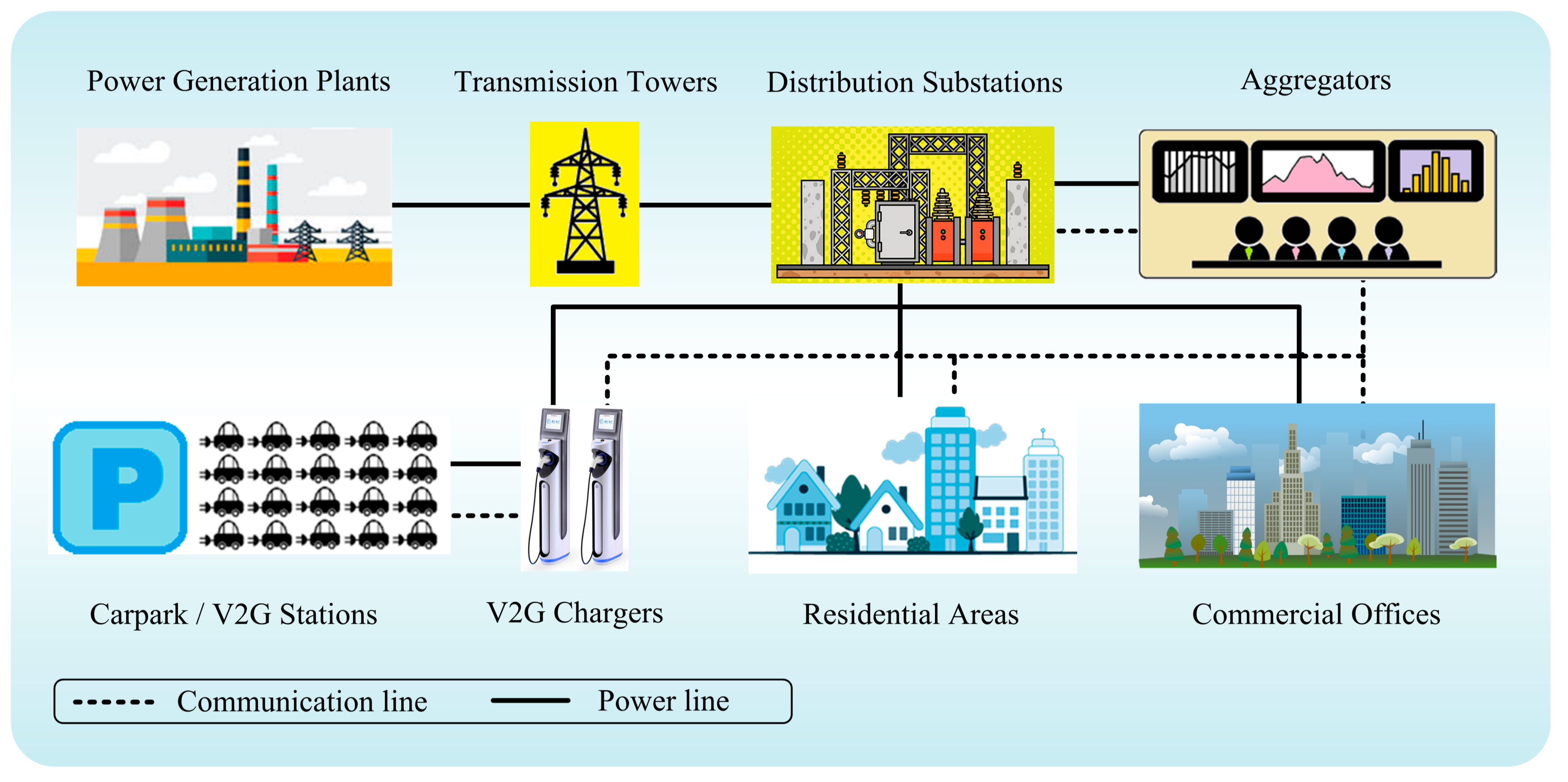
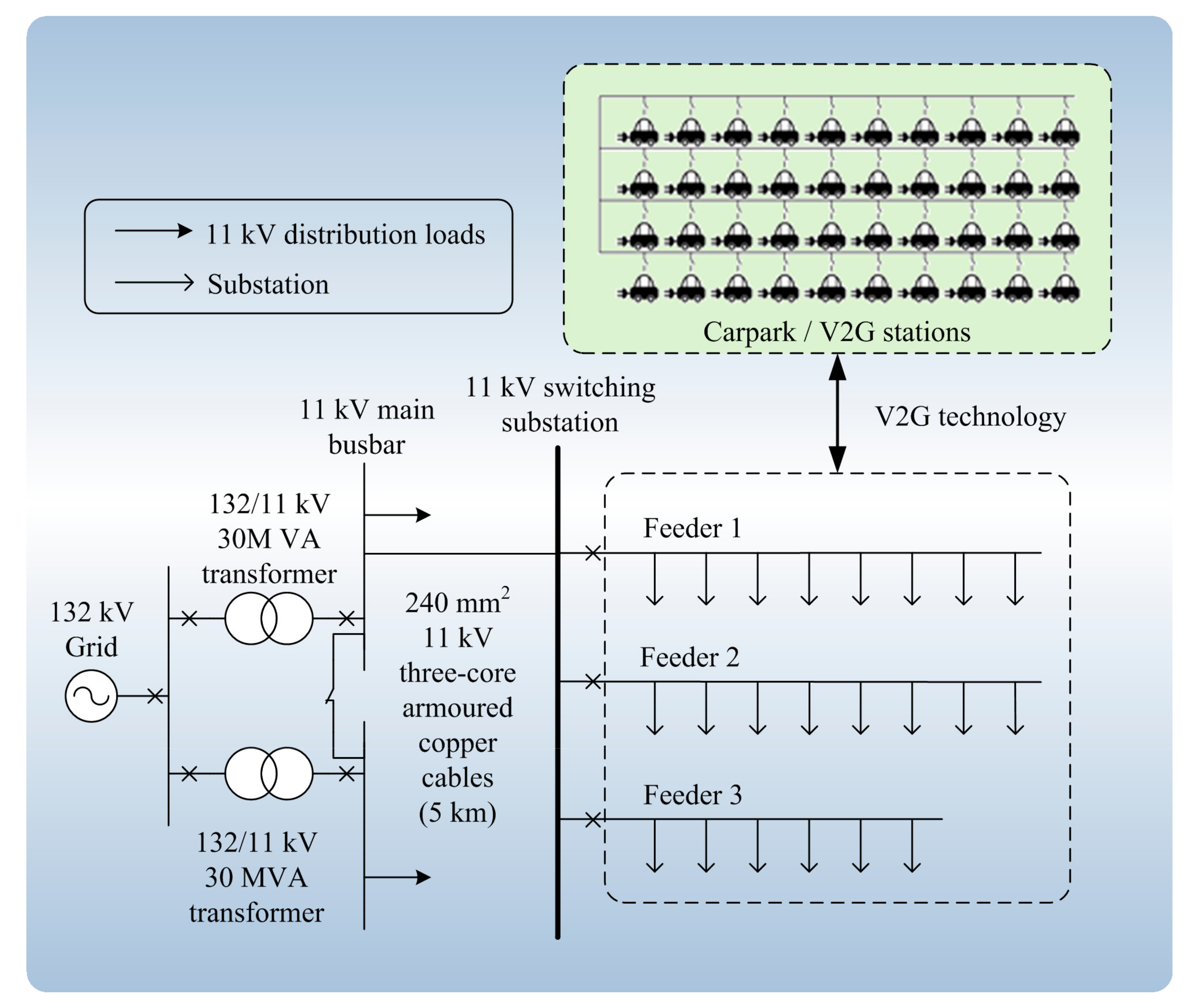
2. Power Grid Model for V2G Implementation
- All the residential, commercial and EV loads were evenly distributed to each substation in the proposed generic township.
- The town had a total of 1800 EV mobility daily, which includes EVs from the generic and nearby townships.
- The smart car parks had sufficient parking spaces equipped with the bidirectional V2G chargers.
- The aggregator had the appropriate bidirectional communication system to monitor the load profile of each substation and access the information of each EV, such as the EV availability and SOC level of EV battery.
- The aggregator was given the full authority to manage and control the amount of power sharing between the EVs and power grid.
3. Problem Formulation
3.1. Objective Function
3.2. Optimization Constraints
3.2.1. Power Balance
3.2.2. SOC of EV Battery
3.2.3. EV Grid Connection Probability
3.2.4. EV Power Exchange Rate
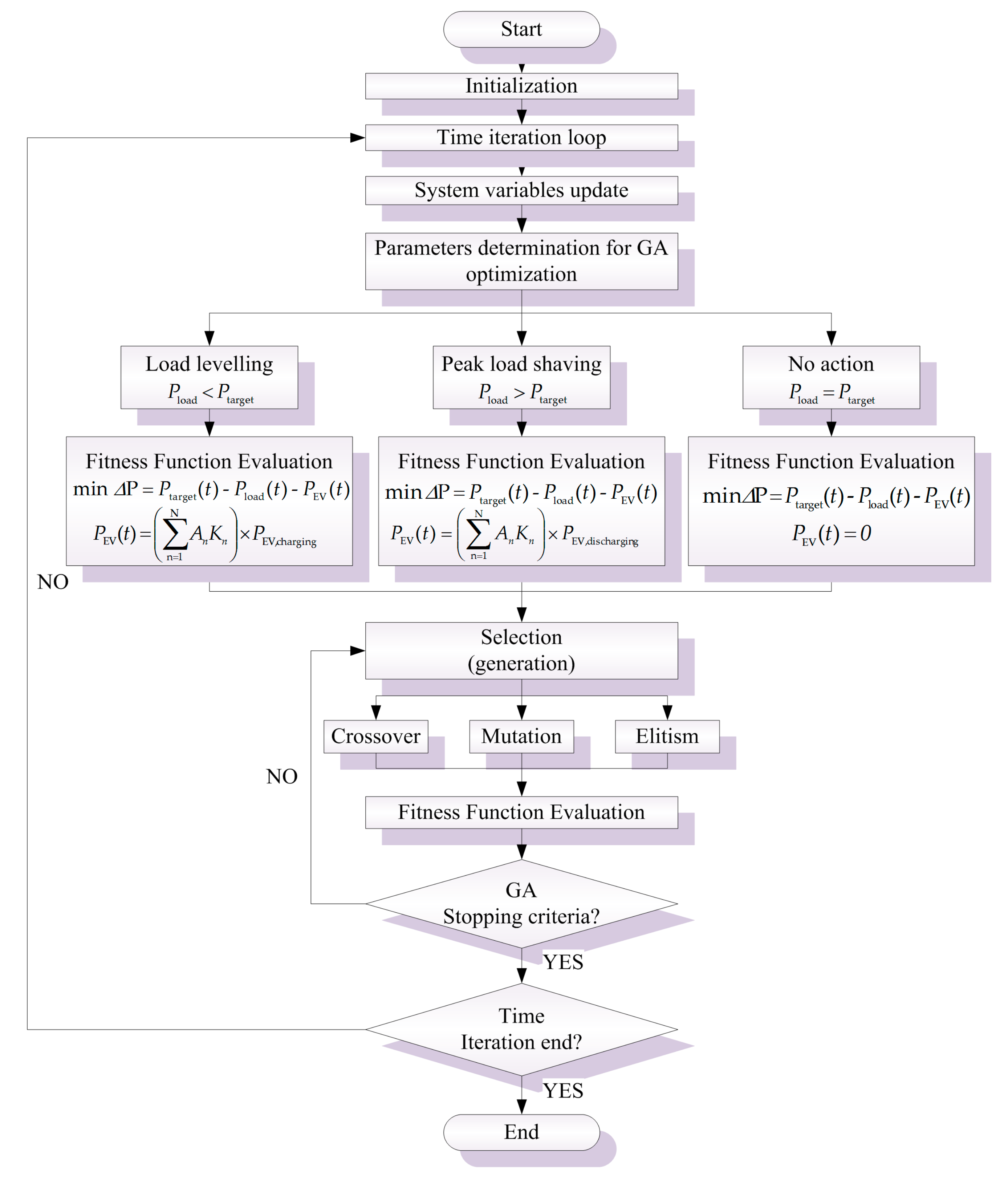
3.3. Optimization Algorithm
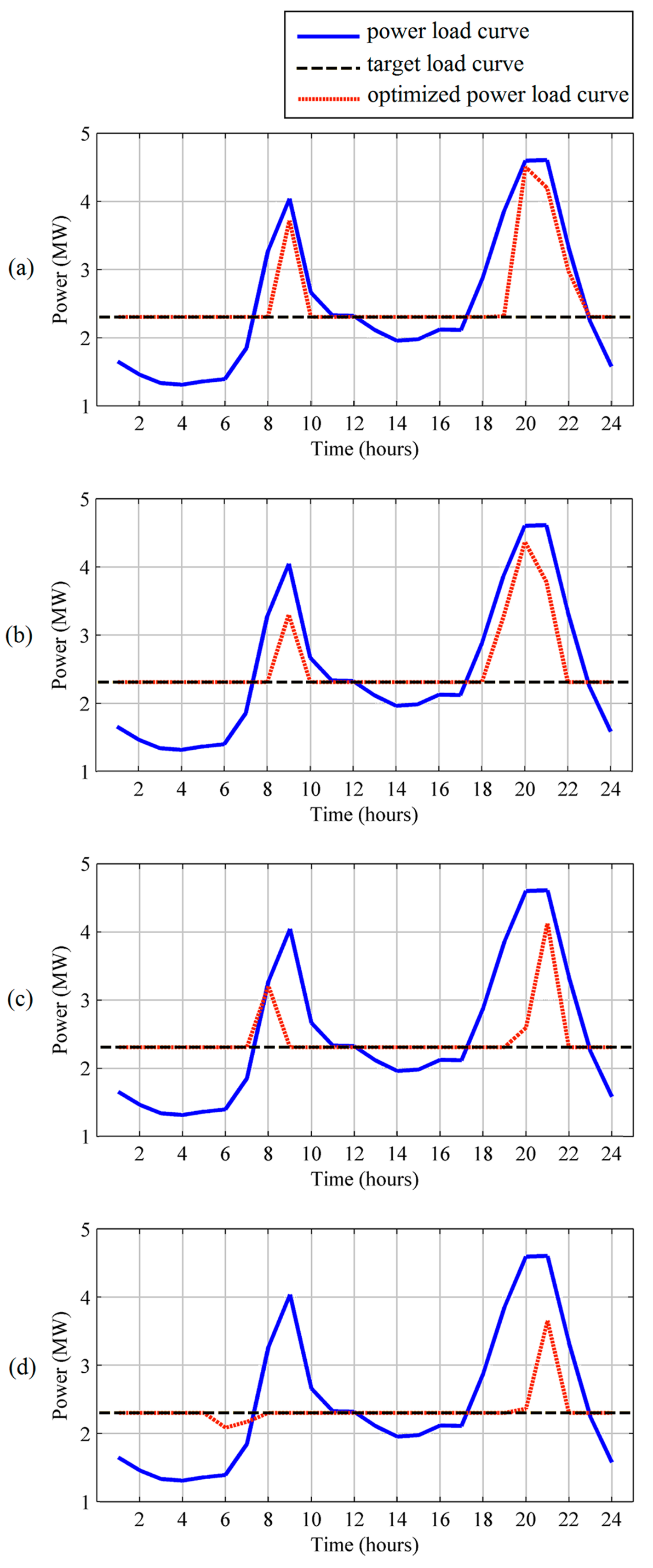
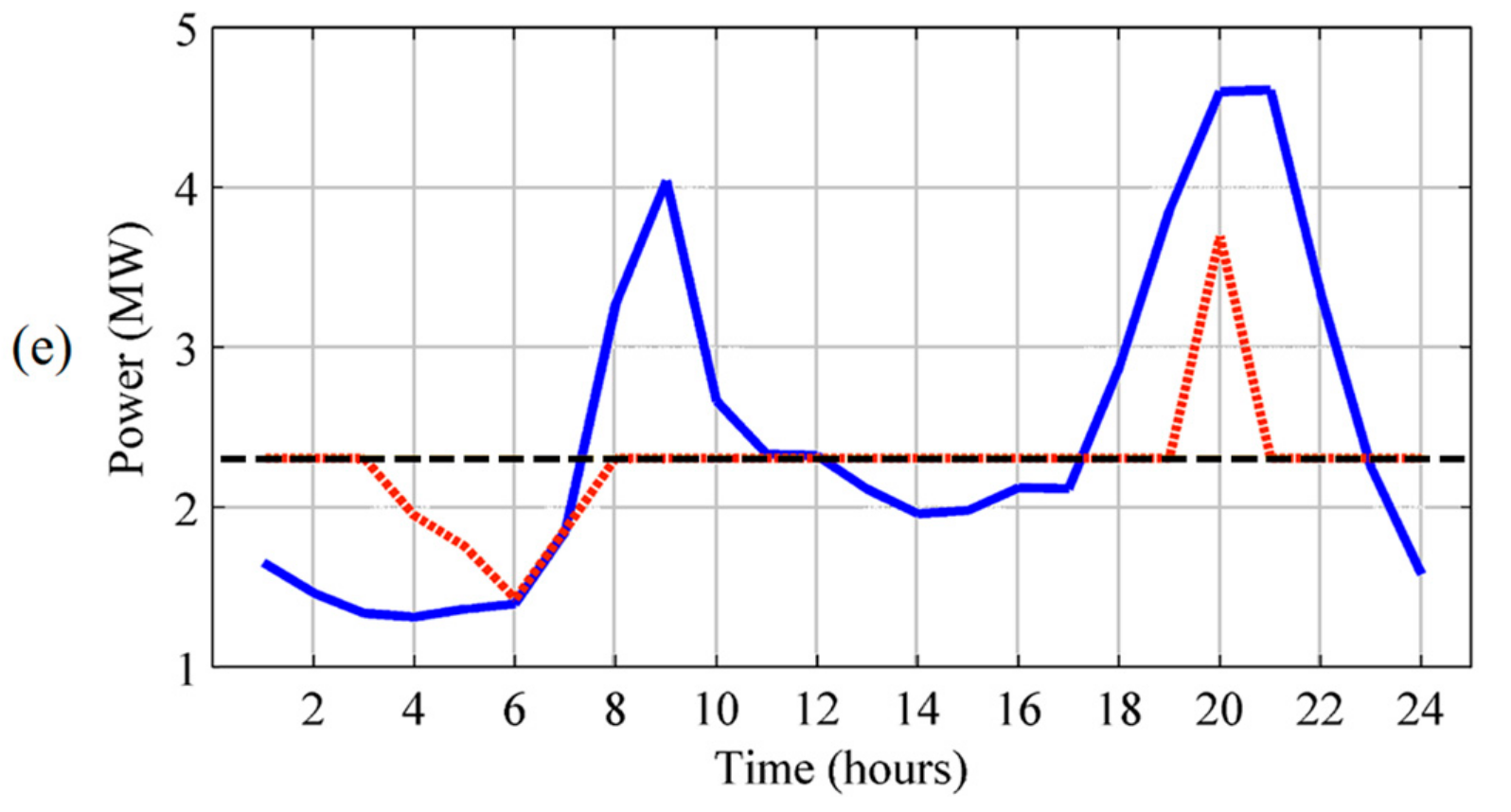
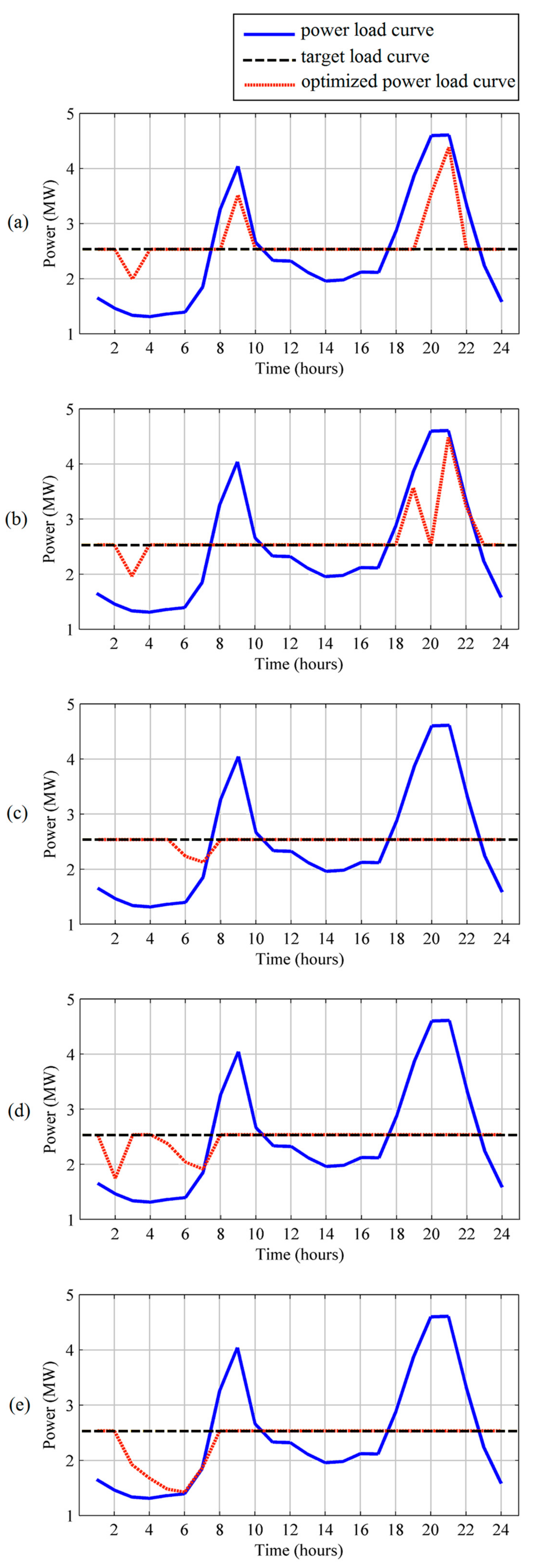
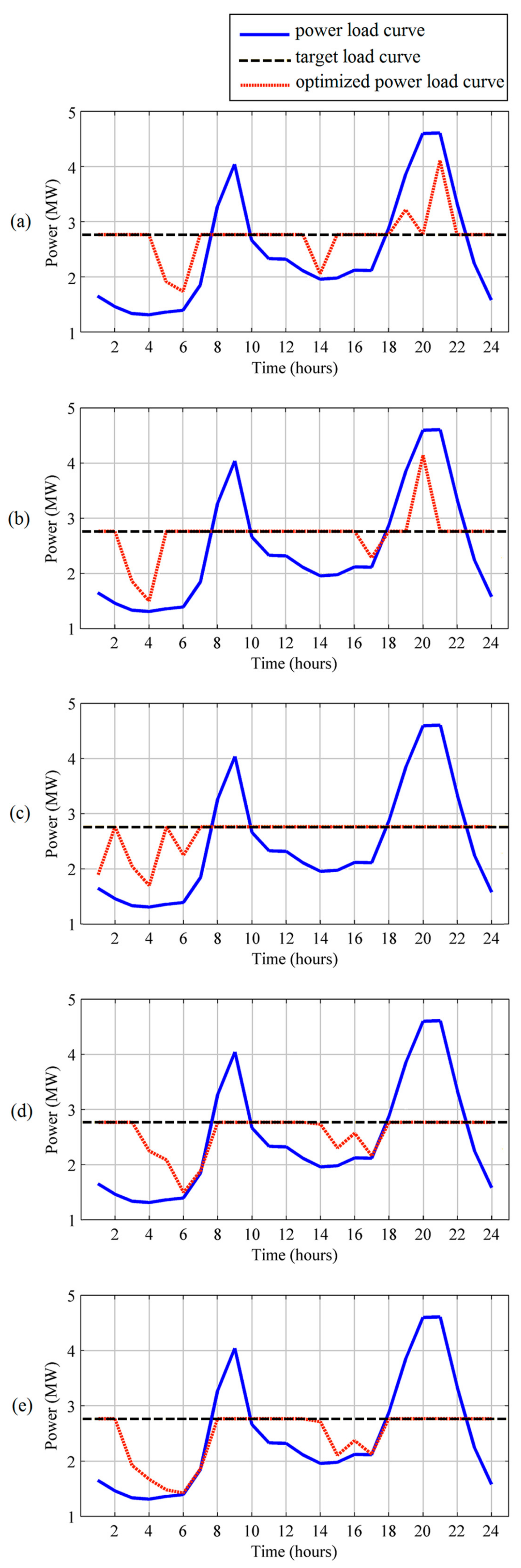
4. Results and Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Global EV Outlook 2016: Beyond One Million Electric Cars. Available online: https://www.iea.org/publications/freepublications/publication/Global_EV_Outlook_2016.pdf/ (accessed on 3 May 2017).
- Hussain, S.; Al-ammari, R.; Iqbal, A.; Jafar, M.; Padmanaban, S. Optimization Of Hybrid Renewable Energy System Using Iterative Filter Selection Approach. IET Renew. Power Gener. 2017, 11, 1440–1445. [Google Scholar] [CrossRef]
- Tiwaria, R.; Babu, N.R.; Sanjeevikumar, P. A Review on GRID CODES—Reactive power management in power grids for Doubly-Fed Induction Generator in Wind Power application. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2017. [Google Scholar]
- Hajizadeh, A.; Norum, L.E.; Hassanzadehc, F.; Sanjeevikumar, P. An Intelligent Power Controller for Hybrid DC Micro Grid Power System. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Saraswathi, A.; Sanjeevikumar, P.; Sutha, S.; Blaabjerg, F.; Ertas, A.H.; Fedák, V. Analysis of Enhancement in Available Power Transfer Capacity by STATCOM Integrated SMES by Numerical Simulation Studies. Eng. Sci.Technol. Int. J. 2016, 19, 671–675. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Vavilapalli, S.; Umashankar, S.; Sanjeevikumar, P.; Ramachandramurthy, V.K. Design and Real-Time Simulation of an AC Voltage Regulator based Battery Charger for Large-Scale PV-Grid Energy Storage Systems. IEEE Access J. 2017. [Google Scholar] [CrossRef]
- Sridhar, V.; Sanjeevikumar, P.; Ramesh, V.; Mihet-Popa, L. Study and Analysis of Intelligent Microgrid Energy Management Solution with Distributed Energy Sources. Energies 2017, 10, 1419. [Google Scholar]
- Bharatiraja, C.; Sanjeevikumar, P.; Siano, P.; Ramesh, K.; Raghu, S. Real Time Foresting of EV Charging Station Scheduling for Smart Energy System. Energies 2017, 10, 337. [Google Scholar]
- Al-Nussairif, M.; Bayindir, R.; Sanjeevikumar, P.; Mihet-Popa, L.; Siano, P. Constant Power Loads (CPL) with Microgrids: Problem Definition, Stability Analysis and Compensation Techniques. Energies 2017, 10, 1656. [Google Scholar]
- Hossain, E.; Perez, R.; Sanjeevikumar, P.; Siano, P. Investigation on Development of Sliding Mode Controller for Constant Power Loads in Microgrids. Energies 2017, 10, 1086. [Google Scholar] [CrossRef]
- Ali, A.; Sanjeevikumar, P.; Twala, B.; Marwala, T. Electric Power Grids Distribution Generation System For Optimal Location and Sizing—An Case Study Investigation by Various Optimization Algorithms. Energies 2017, 10, 960. [Google Scholar]
- Vavilapalli, S.; Sanjeevikumar, P.; Umashankar, S.; Mihet-Popa, L. Power Balancing Control for Grid Energy Storage System in PV Applications—Real Time Digital Simulation Implementation. Energies 2017, 10, 928. [Google Scholar]
- Swaminathan, G.; Ramesh, V.; Umashankar, S.; Sanjeevikumar, P. Investigations of Microgrid Stability and Optimum Power sharing using Robust Control of grid tie PV Inverter. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Tamvada, K.; Umashankar, S.; Sanjeevikumar, P. Impact of Power Quality Disturbances on Grid Connected Double Fed Induction Generator. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sust. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.K.; Do, T.D.; Jung, J.W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Gary, M.K.; Morsi, W.G. Power quality assessment in distribution systems embedded with plug-in hybrid and battery electric vehicles. IEEE Trans. Power Syst. 2015, 30, 663–671. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. A comprehensive planning framework for electric vehicle charging infrastructure deployment in the power grid with enhanced voltage stability. Int. Trans. Electr. Energy 2015, 25, 1022–1040. [Google Scholar] [CrossRef]
- Kempton, W.; Letendre, S.E. Electric vehicles as a new power source for electric utilities. Transp. Res. Part D Transp. Environ. 1997, 2, 157–175. [Google Scholar] [CrossRef]
- Krishna, M.; Daya, F.J.L.; Sanjeevikumar, P.; Mihet-Popa, L. Real-time Analysis of a Modified State Observer for Sensorless Induction Motor Drive used in Electric Vehicle Applications. Energies 2017, 10, 1077. [Google Scholar] [CrossRef]
- Lund, H.; Kempton, W. Integration of renewable energy into the transport and electricity. Energy Policy 2008, 36, 3578–3587. [Google Scholar] [CrossRef]
- Apostolaki-Iosifidou, E.; Codani, P.; Kempton, W. Measurement of power loss during electric vehicle charging and discharging. Energy 2017, 127, 730–742. [Google Scholar] [CrossRef]
- Shinzaki, S.; Sadano, H.; Maruyama, Y.; Kempton, W. Deployment of vehicle-to-grid technology and related issues. SAE Tech. Pap. 2015. [Google Scholar] [CrossRef]
- Tomić, J.; Kempton, W. Using fleets of electric-drive vehicles for grid support. J. Power Sources 2007, 168, 459–468. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Hidrue, M.K.; Parsons, G.R.; Kempton, W.; Gardner, M.P. Willingness to pay for electric vehicles and their attributes. Resour. Energy Econ. 2011, 33, 686–705. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Ghofrani, M.; Arabali, A.; Etezadi-Amoli, M.; Fadali, M.S. Smart scheduling and cost-benefit analysis of grid-enabled electric vehicles for wind power integration. IEEE Trans. Smart Grid 2014, 5, 2306–2313. [Google Scholar] [CrossRef]
- Manbachi, M.; Farhangi, H.; Palizban, A.; Arzanpour, S. A novel volt-VAR optimization engine for smart distribution networks utilizing vehicle to grid dispatch. Int. J. Electr. Power Energy Syst. 2016, 74, 238–251. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sust. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Rao, S.; Berthold, F.; Pandurangavittal, K.; Blunier, B.; Bouquain, D.; Williamson, S.; Miraoui, A. Plug-in hybrid electric vehicle energy system using home-to-vehicle and vehicle-to-home: Optimization of power converter operation. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Detroit, MI, USA, 16–19 June 2013; pp. 1–6. [Google Scholar]
- Khederzadeh, M.; Maleki, H. Coordinating storage devices, distributed energy sources, responsive loads and electric vehicles for microgrid autonomous operation. Int. Trans. Electr. Energy 2015, 25, 2482–2498. [Google Scholar] [CrossRef]
- Mejdoubi, A.E.; Oukaour, A.; Chaoui, H.; Gualous, H.; Sabor, J.; Slamani, Y. State-of-charge and state-of-health lithium-ion batteries’ diagnosis according to surface temperature variation. IEEE Trans. Ind. Electron. 2015, 63, 2391–2402. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal combined bidding of vehicle-to-grid ancillary services. IEEE Trans. Smart Grid 2012, 3, 70–79. [Google Scholar] [CrossRef]
- Shafie-Khah, M.; Heydarian-Forushani, E.; Osório, G.J.; Jamshid Aghaei, F.A.S.G.; Barani, M.; Catalão, J.P.S. Optimal behavior of electric vehicle parking lots as demand response aggregation agents. IEEE Trans. Smart Grid 2016, 7, 2654–2665. [Google Scholar] [CrossRef]
- Nguyen, H.N.T.; Zhang, C.; Mahmud, M.A. Optimal coordination of G2V and V2G to support power grids with high penetration of renewable energy. IEEE Trans. Transp. Electrification 2015, 1, 188–195. [Google Scholar] [CrossRef]
- Xie, S.; Zhong, W.; Xie, K.; Yu, R.; Zhang, Y. Fair energy scheduling for vehicle-to-grid networks using adaptive dynamic programming. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1697–1707. [Google Scholar] [CrossRef] [PubMed]
- Amirioun, M.H.; Kazemi, A. A new model based on optimal scheduling of combined energy exchange modes for aggregation of electric vehicles in a residential complex. Energy 2014, 69, 186–198. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Intelligent unit commitment with vehicle-to-grid—A cost-emission optimization. J. Power Sources 2010, 9, 898–911. [Google Scholar] [CrossRef]
- Nafisi, H.; Abyaneh, H.A.; Abedi, M. Energy loss minimization using PHEVs as distributed active and reactive power resources: A convex quadratic local optimal solution. Int. Trans. Electr. Energy 2016, 26, 1287–1302. [Google Scholar] [CrossRef]
- Nunes, P.; Farias, T.; Brito, M.C. Enabling solar electricity with electric vehicles smart charging. Energy 2015, 87, 10–20. [Google Scholar] [CrossRef]
- Lee, W.; Xiang, L.; Schober, R.; Wong, V.W.S. Electric vehicle charging stations with renewable power generators: A game theoretical analysis. IEEE Trans. Smart Grid 2015, 6, 608–617. [Google Scholar] [CrossRef]
- Jin, C.; Sheng, X.; Ghosh, P. Energy efficient algorithms for electric vehicle charging with intermittent renewable energy sources. In Proceedings of the IEEE Power and Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Rosen, M.A. Intelligent optimization to integrate a plug-in hybrid electric vehicle smart parking lot with renewable energy resources and enhance grid characteristics. Energy Convers. Manag. 2014, 77, 250–261. [Google Scholar] [CrossRef]
- Nan, Z.; Nian, L.; Jianhua, Z.; Jinyong, L. Multi-objective optimal sizing for battery storage of PV-based microgrid with demand response. Energies 2016, 9, 591. [Google Scholar] [CrossRef]
- Gerards, M.E.T.; Hunrink, J.L. Robust peak-shaving for a neighborhood with electric vehicles. Energies 2016, 9, 594. [Google Scholar] [CrossRef]
- López, M.A.; de la Torre, S.; Martín, S.; Aguado, J.A. Demand-side management in smart grid operation considering electric vehicles load shifting and vehicle-to-grid support. Electr. Power Energy Syst. 2015, 64, 689–698. [Google Scholar] [CrossRef]
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Sheikhi, A.; Bahrami, S.; Ranjbar, A.M.; Oraee, H. Strategic charging method for plugged in hybrid electric vehicles in smart grids; a game theoretic approach. Int. J. Electr. Power Energy Syst. 2013, 53, 499–506. [Google Scholar] [CrossRef]
- Jian, L.; Zheng, Y.; Xiao, X.; Chan, C.C. Optimal scheduling for vehicle-to-grid operation with stochastic connection of plug-in electric vehicles to smart grid. Appl. Energy 2015, 146, 150–161. [Google Scholar] [CrossRef]
- Jian, L.; Zhu, X.; Shao, Z.; Niu, S.; Chan, C.C. A scenario of vehicle-to-grid implementation and its double-layer optimal charging strategy for minimizing load variance within regional smart grids. Energy Convers. Manag. 2014, 78, 508–517. [Google Scholar] [CrossRef]
- Kordkheili, R.A.; Pourmousavi, S.A.; Savaghebi, M.; Guerrero, J.M.; Nehrir, M.H. Assessing the potential of plug-in electric vehicles in active distribution networks. Energies 2016, 9, 34. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, S. Grid power peak shaving and valley filling using vehicle-to-grid systems. IEEE Trans. Power Deliv. 2013, 28, 1822–1829. [Google Scholar] [CrossRef]
- Shinde, P.; Swarup, K.S. Optimal electric vehicle charging schedule for demand side management. In Proceedings of the International Conference on Sustainable Green Building and Communities (SGBC), Chennai, India, 18–20 December 2016; pp. 1–6. [Google Scholar]
- Turker, H.; Hably, A.; Bacha, S. Housing peak shaving algorithm (HPSA) with plug-in hybrid electric vehicles (PHEVs): Vehicle-to-home (V2H) and vehicle-to-grid (V2G) concepts. In Proceedings of the Fourth International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Istanbul, Turkey, 13–17 May 2013; pp. 1–7. [Google Scholar]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A controllable local peak-shaving strategy for effective utilization of PEV battery capacity for distribution network support. IEEE Trans. Ind. Appl. 2015, 51, 2030–2037. [Google Scholar] [CrossRef]
- Sridhar, V.; Umashankar, S.; Sanjeevikumar, P. Decoupled Active and Reactive Power Control of Cascaded H-Bridge PV-Inverter for Grid Connected Applications. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Millner, A. Modeling lithium ion battery degradation in electric vehicles. In Proceedings of the IEEE Conference on Innovative Technologies for an Efficient and Reliable Electricity Supply, Waltham, MA, USA, 27–29 September 2010; pp. 349–356. [Google Scholar]
- Camacho, O.M.F.; Nørgård, P.B.; Rao, N.; Mihet-Popa, L. Electrical vehicle batteries testing in a distribution network using sustainable energy. IEEE Trans. Smart Grid 2014, 5, 1033–1042. [Google Scholar] [CrossRef]
- Jerin, A.R.A.; Palanisamy, K.; Sanjeevikumar, P.; Umashankar, S.; Ramachandramurthy, V.K. Improved Fault Ride Through Capability in DFIG based Wind Turbines using Dynamic Voltage Restorer with Combined Feed-Forward and Feed-Back Control. IEEE Access J. 2017. [Google Scholar] [CrossRef]
- Tiwari, R.; Babu, N.R.; Arunkrishna, R.; Sanjeevikumar, P. Comparison between PI controller and Fuzzy logic based control strategies for harmonic reduction in Grid integrated Wind energy conversion system. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Tiwari, R.; Ramesh Babu, N.; Sanjeevikumar, P.; Martirano, L. Coordinated DTC and VOC Control for PMSG based Grid Connected Wind Energy Conversion System. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- Chinthamalla, R.; Sanjeevikumar, P.; Karampuria, R.; Jain, S.; Ertas, A.H.; Fedak, V. A Solar PV Water Pumping Solution Using a Three-Level Cascaded Inverter Connected Induction Motor Drive. Eng. Sci. Technol. Int. J. 2016, 19, 1731–1741. [Google Scholar]
- Jain, S.; Ramulu, C.; Sanjeevikumar, P.; Ojo, O.; Ertas, A.H. Dual MPPT Algorithm for Dual PV Source Fed Open-End Winding Induction Motor Drive for Pumping Application. Eng. Sci. Technol. Int. J. 2016, 19, 1771–1780. [Google Scholar] [CrossRef]
- Swaminathan, G.; Ramesh, V.; Umashankar, S.; Sanjeevikumar, P. Fuzzy Based Micro Grid Energy Management System using Interleaved Boost Converter and Three Level NPC Inverter with Improved Grid Voltage Quality. In Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2018; in press. [Google Scholar]
- Awasthi, A.; Karthikeyan, V.; Rajasekar, S.; Sanjeevikumar, P.; Siano, P.; Ertas, A.H. Dual Mode Control of Inverter to Integrate Solar-Wind Hybrid fed DC-Grid with Distributed AC grid. In Proceedings of the 16th IEEE International Conference on Environment and Electrical Engineering (IEEE-EEEIC’16), Florence, Italy, 7–10 June 2016. [Google Scholar]
- Camacho, O.M.F.; Mihet-Popa, L. Fast Charging and Smart Charging Tests for Electric Vehicles Batteries using Renewable Energy. Oil Gas Sci. Technol. 2016, 71, 3. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Percentage of Target Load Curves (TLCpct) | Average Initial SOC of EV Batteries (SOCi,ave) | ||||
|---|---|---|---|---|---|---|
| 40% | 50% | 60% | 70% | 80% | ||
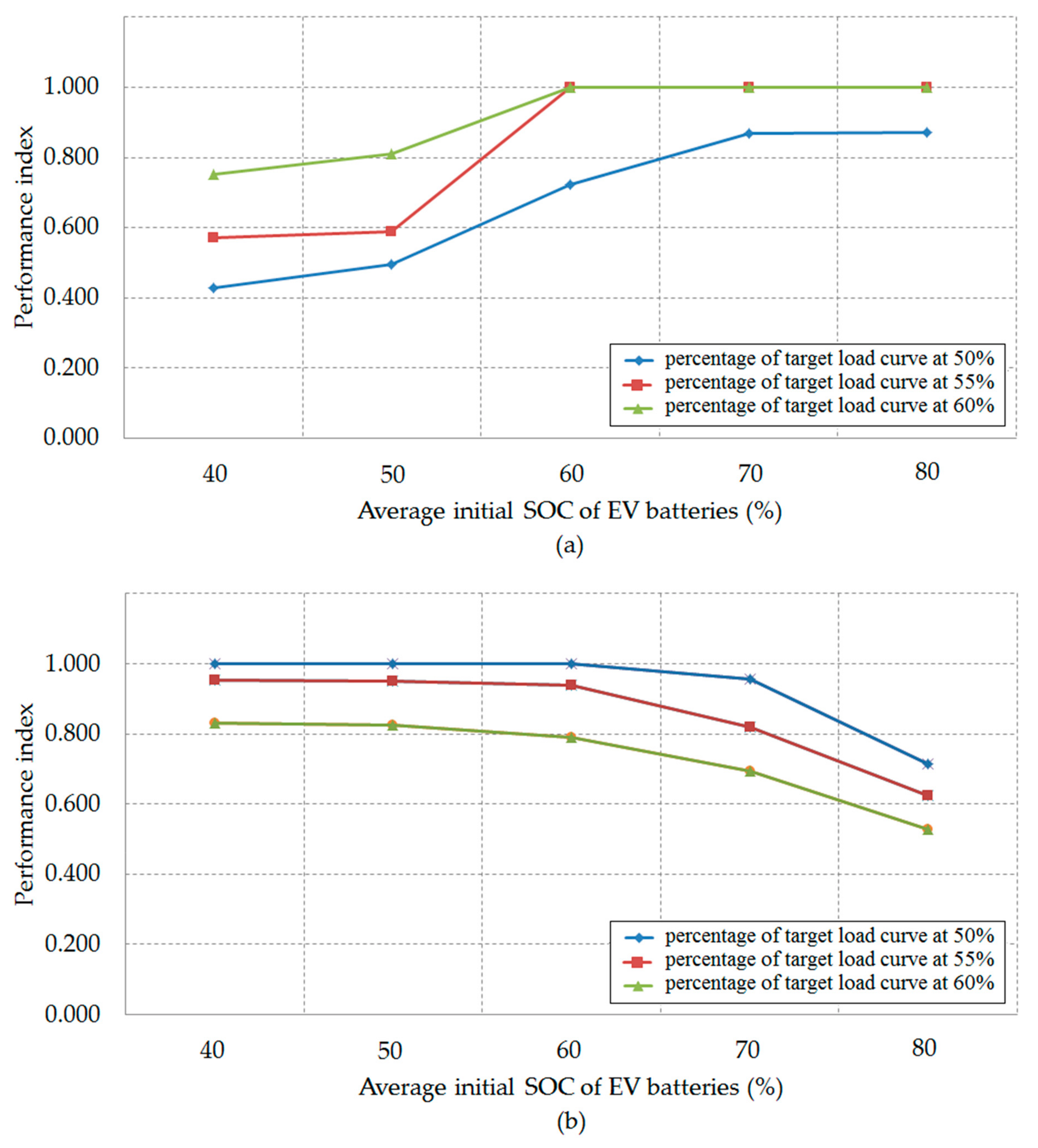
| Peak load shaving | 50% | 0.429 | 0.496 | 0.724 | 0.870 | 0.872 |
| 55% | 0.571 | 0.590 | 1.000 | 1.000 | 1.000 | |
| 60% | 0.751 | 0.809 | 1.000 | 1.000 | 1.000 | |
| Load levelling | 50% | 1.000 | 1.000 | 1.000 | 0.956 | 0.713 |
| 55% | 0.953 | 0.950 | 0.937 | 0.818 | 0.623 | |
| 60% | 0.830 | 0.826 | 0.791 | 0.694 | 0.526 | |
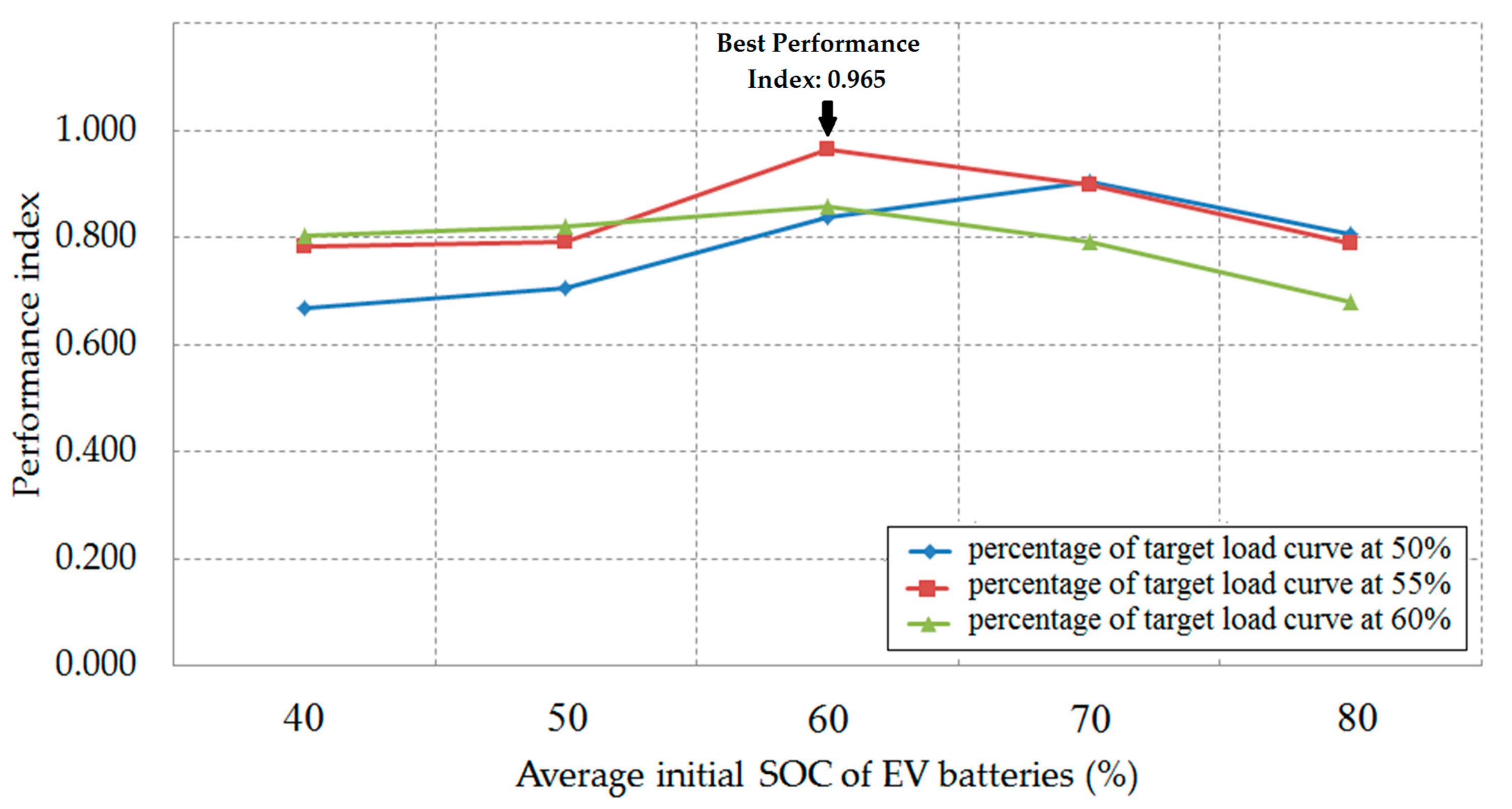
| Overall | 50% | 0.667 | 0.706 | 0.839 | 0.905 | 0.806 |
| 55% | 0.785 | 0.792 | 0.965 | 0.898 | 0.789 | |
| 60% | 0.805 | 0.821 | 0.858 | 0.793 | 0.679 | |
| Parameter | Ref. [55] | Ref. [56] | Ref. [57] | Proposed Algorithm |
|---|---|---|---|---|
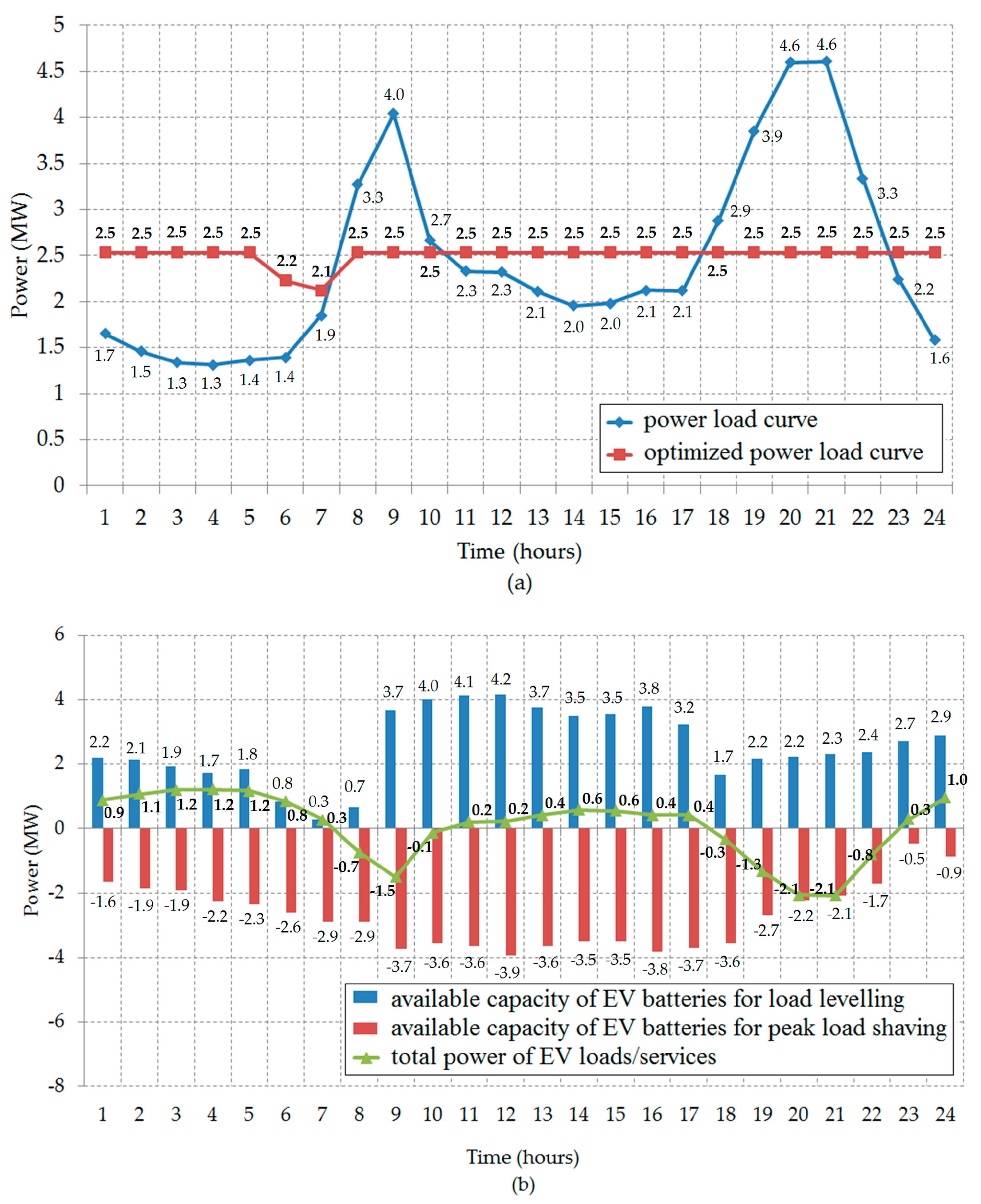
| Pp,before (MW) | 1090 | 188 | 0.56 | 4.6 |
| Pv,before (MW) | 855 | 98 | 0.37 | 1.3 |
| Pd,before (MW) | 235 | 90 | 0.19 | 3.3 |
| Pp,after (MW) | 1080 | 159.8 | 0.49 | 2.5 |
| Pv,after (MW) | 950 | 112 | 0.37 | 2.1 |
| Pd,after (MW) | 130 | 47.8 | 0.12 | 0.4 |
| Pi (%) | 44.68 | 46.89 | 36.84 | 87.88 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y.; Padmanaban, S.; Mihet-Popa, L.; Blaabjerg, F. Minimization of Load Variance in Power Grids—Investigation on Optimal Vehicle-to-Grid Scheduling. Energies 2017, 10, 1880. https://doi.org/10.3390/en10111880
Tan KM, Ramachandaramurthy VK, Yong JY, Padmanaban S, Mihet-Popa L, Blaabjerg F. Minimization of Load Variance in Power Grids—Investigation on Optimal Vehicle-to-Grid Scheduling. Energies. 2017; 10(11):1880. https://doi.org/10.3390/en10111880
Chicago/Turabian StyleTan, Kang Miao, Vigna K. Ramachandaramurthy, Jia Ying Yong, Sanjeevikumar Padmanaban, Lucian Mihet-Popa, and Frede Blaabjerg. 2017. "Minimization of Load Variance in Power Grids—Investigation on Optimal Vehicle-to-Grid Scheduling" Energies 10, no. 11: 1880. https://doi.org/10.3390/en10111880