1. Introduction
The power system generation scheduling is composed of two tasks [
1,
2]: On the one hand, one must determine the scheduling of the turn-on and turn-off of the thermal generating units; on the other hand, one must also determine the economic dispatch (ED), which assigns the amount of power that should be produced by each on-line unit in order to minimize the total operating cost for a specific time generation horizon. The traditional configuration of this problem, known as the Unit Commitment Problem (UCP), was modified to account for environmental concerns.
During the last decades, the rapid growth in the use of fossil fuels has led to the emission of a large amount of atmospheric pollutants, that are continuously released into the environment. The increased public awareness regarding the harmful effects of atmospheric pollutants on the environment, as well as the tightening of environmental regulations, namely due to the goals imposed by the Kyoto protocol and later by the Paris Agreement [
3], have forced power utilities to search for different operational strategies. These new strategies must lead to a reduction in pollution and environmental emissions. Thus, power utilities should look for solutions that in addition to being cost-effective must also be environmentally friendly. The carbon emissions produced by fossil-fueled thermal power plants need also to be minimized. It is necessary to consider these emissions as another objective. Therefore, we are in the presence of a problem with two, usually conflicting objectives.
Current research is directed to handle both objectives simultaneously as competing objectives instead of simplifying the multi-objective nature of the problem by converting it into a single objective problem. The multi-objective version of the UCP has not been the subject of extensive research and most of the works reported in the literature either considers the emissions as constraints [
4,
5] or transforms the problem into a single objective one, see, e.g., [
6,
7,
8]. A recent review on the use of multi-objective optimization (MOO) in the energy sector, namely in the electricity sector, can be found in [
9]. Several methods have been reported in the literature concerning the environmental/economic dispatch problem such as Genetic Algorithms [
10,
11,
12], Differential Evolution Algorithms [
13,
14], Harmony Search Algorithms [
15], Gravitational Search Algorithms [
16], Particle Swarm Optimization Algorithms [
17,
18,
19], and Bacterial Foraging Algorithms [
20]. These methods fall into the category of metaheuristics, which are optimization methods known to be able to provide good quality solutions within a reasonable computational time (see e.g., [
21,
22]). Different Multi-objective Optimization Evolutionary Algorithms (MOEA’s), such as Niched Pareto Genetic Algorithm (NPGA) [
23], Strength Pareto Evolutionary Algorithm (SPEA) [
24] and Non-dominated Sorting Genetic Algorithm (NSGA) [
25,
26] have been applied to multi-objective problems. Since they use a population of solutions in their search, multiple Pareto-optimal solutions can, in principle, be found in one single run.
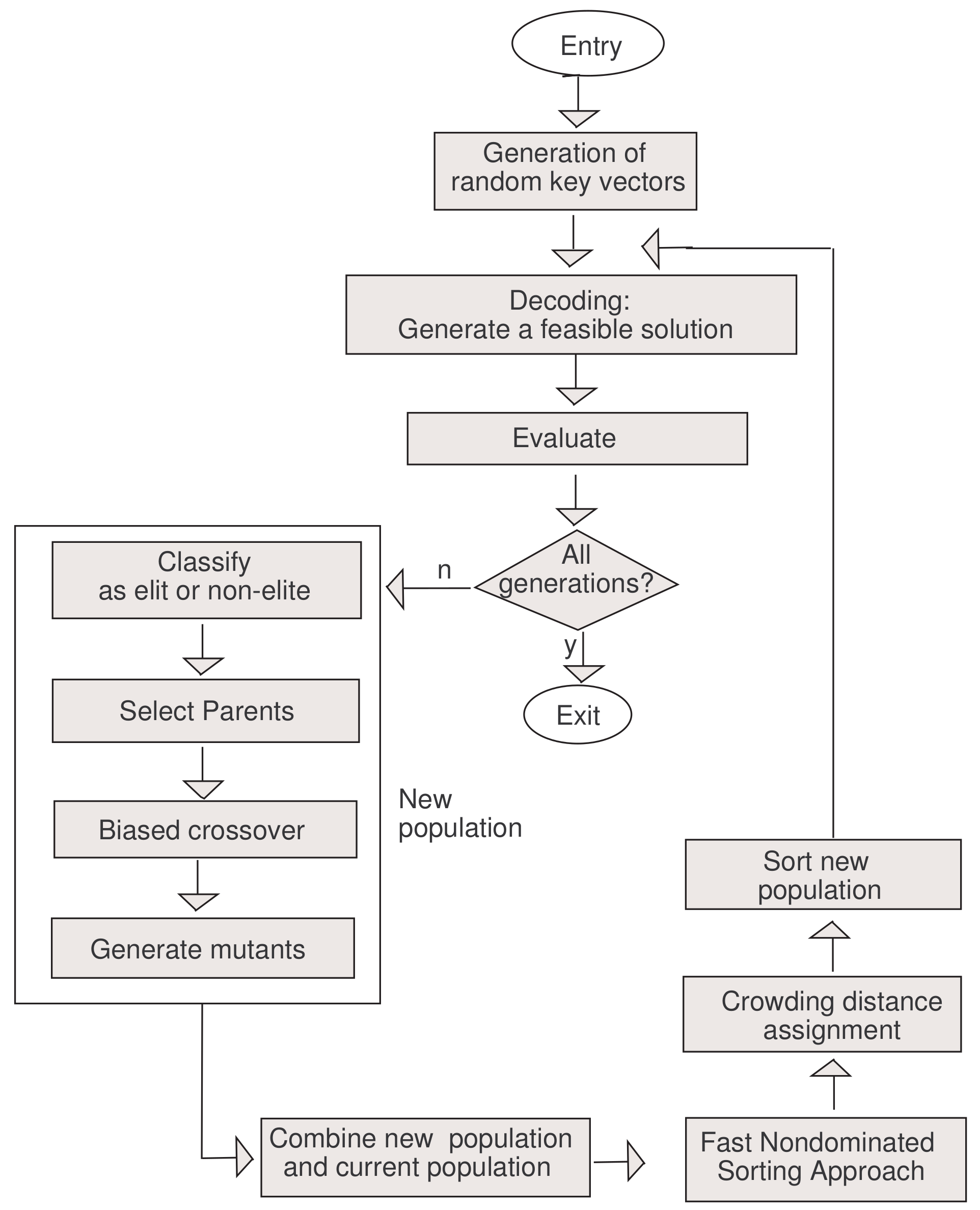
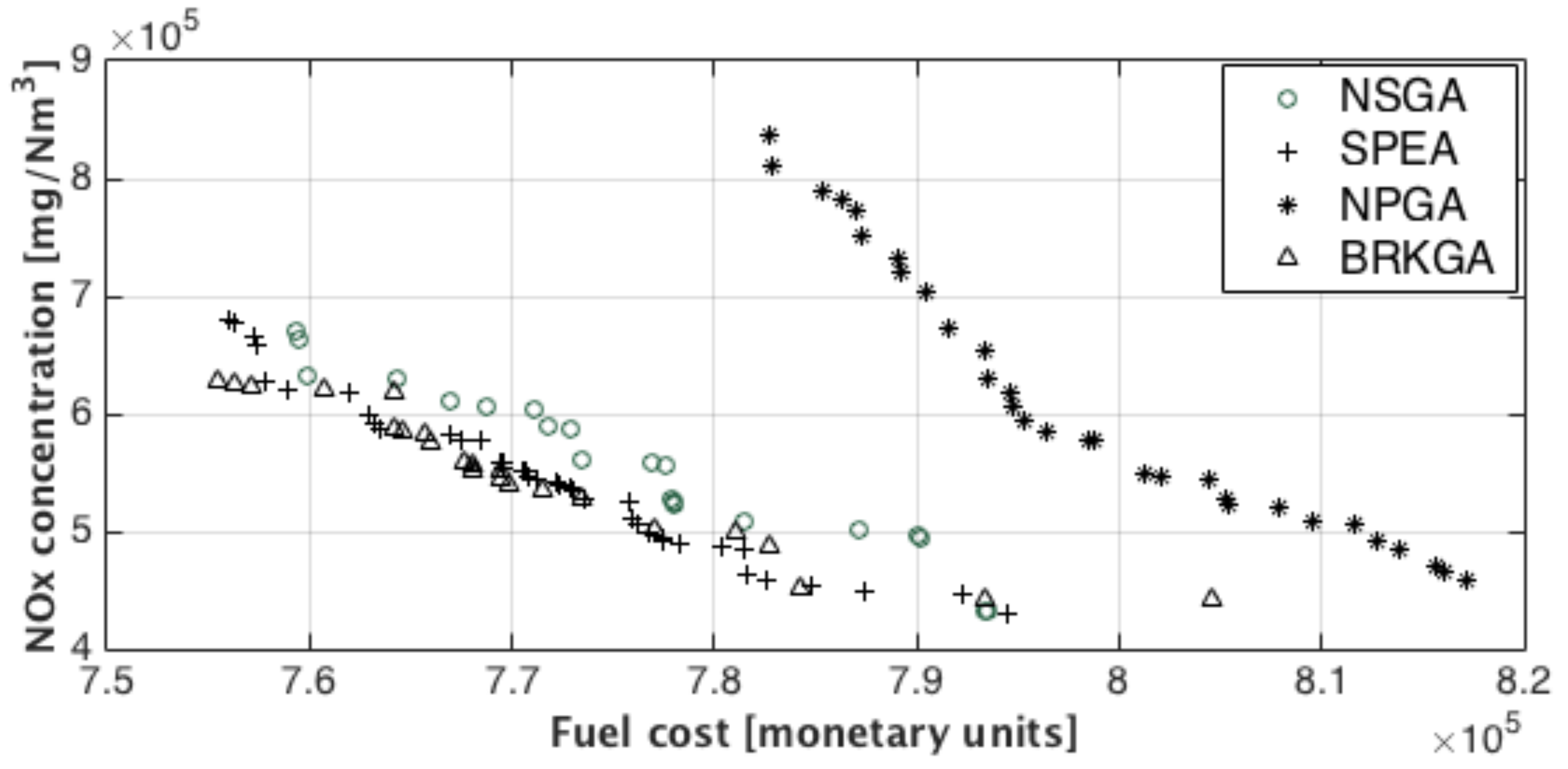
In this paper, we propose to address simultaneously the UC and ED problems using multi-objective optimization. We consider deterministic requirements for the physical generation, load and spinning reserve as is usual in the classical unit commitment problem and, in addition, we take into account the emission of pollutants. The electrical network phenomena such as transmission constraints and power losses are not considered. Also, the uncertainties related to stochastic load demand as well as intermittent power generation by renewable sources such as wind and solar are not considered in our model. A Biased Random Key Genetic Algorithm (BRKGA) combined with a non-dominated sorted procedure and Multi-objective Optimization Evolutionary Algorithm (MOEA) techniques are proposed. The BRKGA developed is based on the framework proposed in [
27] and on a previous version developed for the single objective UC problem in [
28,
29]. Here, the BRKGA approach includes a ranking selection method, that is used for ordering the non-dominated solutions, and a crowded-comparison procedure as in NSGA-II. The crowded-comparison procedure replaces the sharing function procedure used in original NSGA, which allows for maintaining diversity in the population. We also compare the algorithm here proposed with the NSGA-II, SPEA2, and NPGA techniques. Our algorithm is tested on two standard 24-h test systems, introduced in [
30,
31], each considering several cases involving from 10 up to 100 generating units.
The remaining of the paper is organized as follows.
Section 2 surveys the most significant literature on the UCP with environmental concerns.
Section 3 provides the description and formulation of the environmental/economic unit commitment problem. An explanation on the BRKGA and alternative solution methodologies as well as their implementation are given in
Section 4. In
Section 5, the computational experiments are reported and the obtained results discussed. In
Section 6 some conclusions are drawn.
2. The Unit Commitment Problem with Environmental Concerns
There exist by now a considerable literature on the UCP including environmental concerns. The environmental concerns have been incorporated into the unit commitment problem in two ways, namely: as a constraint and as an objective. In the latter case, some authors still treat the problem as a single objective problem by combining the two objectives into one, while others address it as a bi-objective problem and thus look for non-dominated solutions.
In some studies, see e.g., [
4,
5,
32,
33], the UCP is addressed considering emission constraints. In the aforementioned works, Lagrangian relaxation-based algorithms have been proposed. The authors in [
32] propose an augmented Lagrangian relaxation, where the system constraints, e.g., load demand, spinning reserve, transmission capacity and environmental constraints, are relaxed by using Lagrangian multipliers, and quadratic penalty terms associated with system load demand balance are added to the Lagrangian objective function. At each iteration, the quadratic penalty terms are linearized, around the solution obtained at the previous iteration, and the resulting problem is decomposed into N subproblems. The corresponding unit scheduling subproblems are solved using dynamic programming, while the economic dispatch is solved with a network flow algorithm.
A different approach is taken in [
5], which uses a modified differential evolution approach. A solution to the UCP is encoded as a binary matrix, representing the switching schedule, and an integer vector, determining the power generated by each unit. After randomly generating the binary matrix, feasibility is ensured for the spinning reserve constraints and for the up/down time constraints by modifying the matrix, if needed. This is done by considering the units in descending order of the ratio of the fuel costs to the maximum power. Then for each time period the power to be generated is randomly obtained for the on units within their generation limits. Once the population has been generated mutation and crossover operators are applied to obtain the next generation. Emissions and power balance constrains are dealt with in the fitness function through the use of heavy penalties. The authors report results for one six-units problem instance with a 24-h planning horizon.
The UCP considering emissions as a second objective function but combined with the main objective function (operating costs) has been addressed by several authors and approaches. In [
34] the authors combine the objectives functions using a weighting factor and use a Lagrangian-relaxation-based algorithm. The authors in [
35] use a price penalty factor, defined as the ratio between maximum fuel cost and maximum emission of the corresponding generator, to blend the emission with fuel costs. Since the solution procedure proposed relies on an exhaustive enumeration (generates all possible combinations of the generator unit status), it guarantees the optimality of the solution. However, it is only feasible for small sized problem instances (it has been tested on a 5 units system). This problem is also addressed in [
36], where the authors propose several techniques, namely: genetic algorithms, evolutionary programming, particle swarm optimization, and differential evolution. Although the authors compare the results obtained with the four techniques, it was not possible to draw any strong conclusions about the techniques efficiency and effectiveness since only two problem instances have been solved. In [
37] the UCP with three conflicting functions such as fuel cost, emission and reliability level of the system is considered. These functions are formulated as a single objective function using the fuzzy set theory. A binary real coded Artificial Bee Colony algorithm is proposed, where the binary coded ABC is used to determine the generation units status and the real coded ABC is used to determine the production of the on-line units. The disadvantage of such approaches is that they do not allow for obtaining a set of solutions with a tradeoff between costs and emissions since an apriori compromise is defined. In [
38], an approach based on the convex combination of the objective functions, the weighting factor is then varied between 0 and 1. The problem version address only considers constraints on load, spinning reserve, and output limits. The solution procedure is based on the decommitment approach, i.e., it starts by that all units are turned on and then it decommits units one at the time, based on cost savings and on emissions reduction. A single problem instance with 10-units has been solved. This type of approaches has several disadvantages: a uniform spread of weight parameters, in general, does not produce a uniform spread of points on the Pareto-front; Non-convex parts of the Pareto set cannot be reached by minimizing convex combinations of the objective functions; Implies a considerable computational burden since several runs are needed, as many times as the number of desired optimal solutions. Other authors have combined the last two strategies, i.e., combining the two objective functions and imposing constraints on the achievable values for one or both objectives, in order to try to overcome their drawbacks. Catalão et al. [
39,
40] address the multi-objective unit commitment problem considering cost and emission objective functions. The authors propose an approach based on Lagrangian relaxation, which combines the weighted sum method, using a convex combination of the objective functions, with the
-constraining method, constraining the objectives to be within pre-specified threshold levels. The approach was tested on a case study with 11 thermal units and a scheduling time horizon of 168 h and the results reported demonstrated it to be fast and efficient.
In [
6] a Teaching Learning Based Optimization Algorithm (TLBO) is proposed to address the UCP with emissions and costs. In this work, the authors aim is to find a solution that balances the emissions and costs. Thus, they defined as their objective to look for a solution that is about as much far away from the best in both objectives. Therefore, they consider a single objective function, which is given by the weighted sum of the normalized emissions and costs. The TLBO uses a classroom analogy to solve optimization problems. Solutions are students and the solution quality represents the students grade. Solutions (students) interact (learn) with each other and by doing so are capable of improving their quality (grade) by using the best parts of others solutions. The units schedule is represented by a binary matrix that if needed is repaired in order to only deal with feasible solutions. The power generated by each only unit is determined by solving the corresponding quadratic minimization problem. The solutions are then randomly changed to become closer to the best on. Computational experiments were performed by considering the usual benchmark UCP problem instances with 10 up to 100 generating units.
Recent research focus on handling both objectives simultaneously as competing objectives instead of simplifying the multi-objective nature of the problem by converting it into a single objective problem. Several methods have been reported in the literature concerning the environmental/economic dispatch problem such as Genetic Algorithms [
10,
11,
12], Differential Evolution Algorithms [
13,
14], Harmony Search Algorithms [
15], Gravitational Search Algorithms [
16], Particle Swarm Optimization Algorithms [
17,
18,
19], and Bacterial Foraging Algorithms [
20]. Several MOEAs like Niched Pareto Genetic Algorithm (NPGA) [
23], Strength Pareto Evolutionary Algorithm (SPEA) [
24] and Non-dominated Sorting Genetic Algorithm (NSGA) [
25,
26] have been applied to multi-objective problems. Since they use a population of solutions in their search, multiple Pareto-optimal solutions can, in principle, be found in one single run.
In [
10] a
-defined multi-objective genetic algorithm is described. The proposed algorithm is based on the concept of co-evolution and incorporates a repair procedure that forces the non-linear constraints satisfaction. The non-dominated solutions in archive of finite size are iteratively updated take into account the concept of
-dominance. A Multi-Objective Harmony Search (MOHS) algorithm is proposed in [
15]. The MOHS algorithm uses a non-dominated sorting and ranking procedure with dynamic crowding distance. In [
16] the Opposition-based Gravitational Search Algorithm (OGSA) is used to improve the convergence rate of the Gravitational Search Algorithm. The proposed approach employs opposition-based learning for population initialization and also for generation jumping. The OGSA algorithm was tested on four standard power systems problems of combined economic and emission dispatch (CEED).
Abido [
17] propose a multi-objective particle swarm optimization (MOPSO) that includes a hierarchical clustering technique to manage Pareto-optimal set size. The MOPSO performances in terms of non-dominated solutions diversity and well-distribution characteristics are also studied. Zhang et al. [
18] propose a new Bare-Bones Multi-Objective Particle Swarm Optimization (BB-MOPSO) algorithm. The BB-MOPSO include a particle updating strategy; a mutation operator with action range varying over time and an approach based on particle diversity to update the global particle leaders. However, the algorithm proposed requires tuning control parameter such as acceleration coefficients, inertia weight, and velocity clamping. Pandit et al. [
20] proposes an Improved Bacterial Foraging Algorithm (IBFA) in which a parameter automation strategy and crossover operation is used in micro BFA to improve computational efficiency. The IBFA approach obtains Pareto-optimal solutions for combined static/dynamic environmental economic dispatch. The authors in [
26] propose a method combining Non-dominated Sorting Genetic Algorithm-II (NSGA-II) with problem-specific crossover and mutation operators. The initial population is obtained by randomly generating the unit status (binary matrices) except for one solutions that are obtained through a priority list. The power dispatch is obtained by using the lambda-iteration method. Parents are randomly chosen from a pool, formed using binary tournament and the offspring is obtained by applying window crossover. Mutation is applied using swap window and window operators. Then the NSGA-II principle is used to form the next generator. The authors have one problem instance with 60 generating units. This work has then been improved in [
41] since problem specific binary genetic operators are used for the unit status matrix (commitment matrix) and real genetic operators are used for the power matrix thus exploring the binary and real spaces separately. The authors also use two different crossover procedures, one to evolve the commitment matrix and another to evolve the power matrix. Solution feasibility concerning to power demand satisfaction is ensured through a repair mechanism. The violation of other constraints results in a violation penalty. Baskar et al. [
11] propose a modified NSGA-II (MNSGA-II) algorithm for economic and emission dispatch problem. The NSGA-II drawbacks such as lack of uniform diversity of non-dominated solutions and lack of lateral diversity-preserving operator were corrected by introducing dynamic crowding distance (DCD) and controlled elitism (CE) into the NSGA-II.
There is other research on the UCP that considers renewable energy generating units, which is recent. However, current discussion involves several different issues, such as types of resources [
42], uncertainties regarding renewable resources [
43,
44,
45,
46], and pumped hydro-energy storage [
47,
48]. For very recent literature reviews see, e.g., [
49,
50] and the references therein. Despite these recent research trend, not many works have yet been reported on the MO version of the UCP involving renewable resources, specially without transforming it into a SO version. Here, we refer to the very few and recent exceptions. In [
51] a non-dominating backtrack searching algorithm is proposed to approximate the Pareto front regarding cost and risk minimization. The risk objective is related to the possible power shortage and unit outage, due to the consideration of wind generating units and it is modelled as a risk index. Results are provided regarding two problem instances. In [
52] a multi-objective gravitational search algorithm (MOGSA) is used to find some Pareto optimal solutions, regarding the minimization of cost and emissions. The UCP considered includes hydro, pump storage, wind farm, and solar farm, with and without ramp rates.
In the next sections, we describe the UCP and ED problems using multi-objective optimization. We also describe the methodology used to solve the problem: a metaheuristic method based on a Biased Random Key Genetic Algorithm and combined with a non-dominated sorted procedure.
3. The Multi-Objective UCP Optimization Based on Evolutionary Algorithms
The problem of scheduling power generators is formulated as a bi-objective optimization model. The problem data is considered deterministic, the uncertainties related to load demand and renewable energy resources (wind, solar) are not studied in this work. Also the electrical network phenomena such as transmission constraints and power losses are not included.
In the multi-objective UC problem, one needs to determine an optimal schedule, which minimizes the production cost and emission of atmospheric pollutants over the scheduled time horizon subject to system and operational constraints. Therefore, the multi-objective UC problem should be formulated including both objectives, i.e., the minimization of the operational costs and the minimization of the pollutant emissions.
Due to its combinatorial nature, multi-period characteristics, and nonlinearities, the UC problem is a hard optimization problem, which involves both integer and continuous variables and a large set of constraints. The first component of the objective function is concerning to the system operational costs composed of generation and start-up costs.
where
and
are the start-up and shut-down costs of unit
j at time period
t, respectively. The generation costs, i.e., the fuel costs, are conventionally given by a quadratic cost functions,
, as in Equation (
3),
where
are the cost coefficients of unit
j. On the other hand, the second objective is to minimize the total quantity of atmospheric pollutant emissions such as NO
and CO
.
where
is the start-up pollutant emissions of unit
j at time period
t. Here,
represents the emissions produced by each thermal unit
j in on-line status, which is expressed as a quadratic function in terms of output power generation,
where
are the emission coefficients of unit
j. The constraints can be divided into two categories: the system constraints and the technical constraints. Regarding the first category of constraints it can be further divided into load requirements and spinning reserve requirements, which can be written as follows:
- (1)
Power Balance Constraints: The sum of unit generation outputs must cover the total power demand, for each time period.
- (2)
Spinning Reserve Constraints: The total amount of real power generation available from on-line units net of their current production level must satisfy a pre-specified percentage of the load demand.
The second category of constraints includes unit output range, the minimum number of time periods that the unit must be in each status (on-line and off-line), and the maximum output variation allowed for each unit.
- (3)
Unit Output Range Constraints: For each time period
t and unit
j, the real power output of each generator is restricted by lower and upper limits.
- (4)
Ramp rate Constraints: Due to the thermal stress limitations and mechanical characteristics, the output variation levels of each online unit in two consecutive periods are restricted by ramp rate limits.
- (5)
Minimum Uptime/Downtime Constraints: If the unit has already turned on/off, there will be a minimum uptime/downtime time before it is shut-down/started-up, respectively.
As already mentioned, the uncertainties related to a varying load demand and varying renewable energy resources are not addressed in this model. Also, the electrical network phenomena such as transmission constraints and power losses are not considered. These assumptions are usual in many studies of the unit commitment problem, as is discussed in works mentioned in the previous section. The main aim of the UCP is to provide a plan for the schedule of units on a relatively long term, typically 24 h or more. After the units are committed and having a plan for the dispatch, the economic dispatch problem is often re-solved using more recent (real-time) data and additional constraints related to the network.






{kind=link}
{kind=link}
{kind=link}