Figure 1.
Schematics of Steam Assisted Gravity Drainage (SAGD) and Expanding Solvent–SAGD (ES-SAGD): (a) SAGD; and (b) ES-SAGD.
Figure 1.
Schematics of Steam Assisted Gravity Drainage (SAGD) and Expanding Solvent–SAGD (ES-SAGD): (a) SAGD; and (b) ES-SAGD.
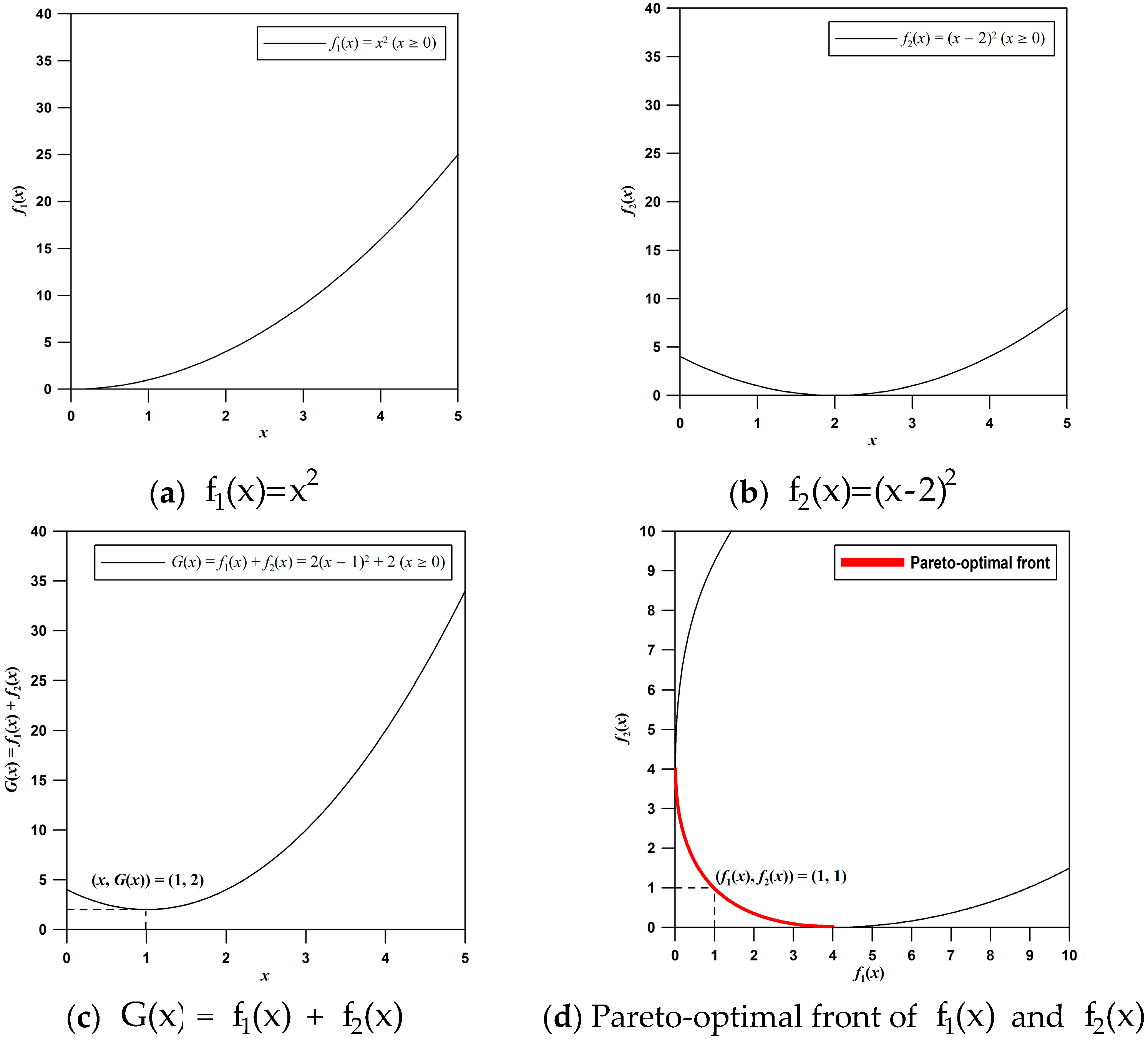
Figure 2.
Comparison of global- and multi-objective optimization for a two-objective minimization problem. The global optimum obtained from global-objective optimization is (, ) = (1, 2), which is neither the optimum for nor the optimum for . The global optimum is the closest Pareto-optimal solution from the origin under the given weights in objective space. Here, the origin is the ideal but infeasible solution.
Figure 2.
Comparison of global- and multi-objective optimization for a two-objective minimization problem. The global optimum obtained from global-objective optimization is (, ) = (1, 2), which is neither the optimum for nor the optimum for . The global optimum is the closest Pareto-optimal solution from the origin under the given weights in objective space. Here, the origin is the ideal but infeasible solution.
Figure 3.
Flow chart to design the ES-SAGD process using hybrid NSGA-II algorithm combined with proxy models. The quadratic response surface models are developed from reservoir simulation results of training scenarios of ES-SAGD and then used to evaluate the quality of each ES-SAGD scenario regarding bitumen recovery, cumulative steam–oil ratio, and cumulative solvent–steam ratio. NSGA-II generationally evolves the ES-SAGD scenarios using non-dominated sorting and crowding-distance sorting until the stopping criteria are satisfied.
Figure 3.
Flow chart to design the ES-SAGD process using hybrid NSGA-II algorithm combined with proxy models. The quadratic response surface models are developed from reservoir simulation results of training scenarios of ES-SAGD and then used to evaluate the quality of each ES-SAGD scenario regarding bitumen recovery, cumulative steam–oil ratio, and cumulative solvent–steam ratio. NSGA-II generationally evolves the ES-SAGD scenarios using non-dominated sorting and crowding-distance sorting until the stopping criteria are satisfied.
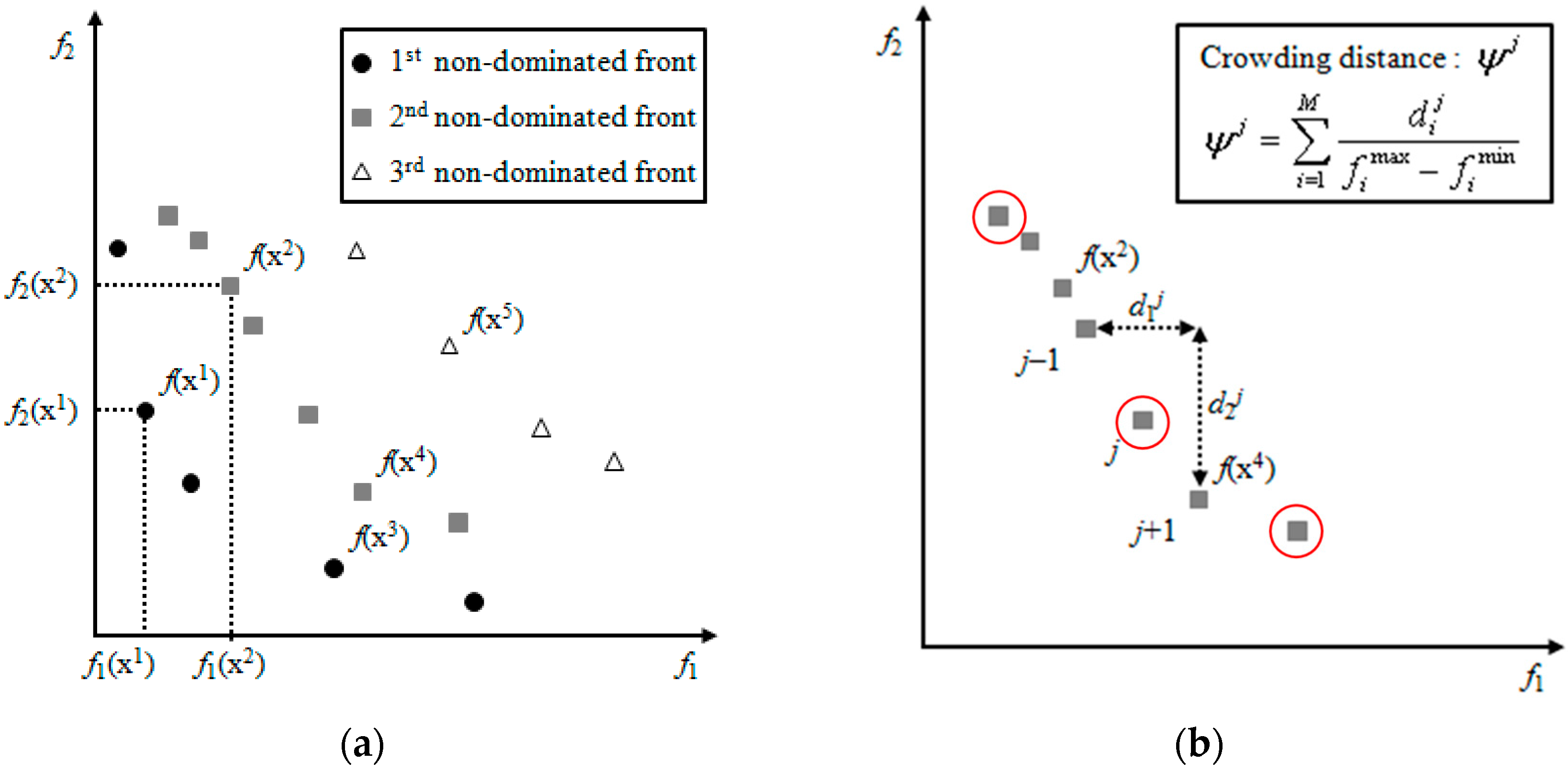
Figure 4.
Ranking evaluation using NSGA-II for a bi-objective minimization problem: (a) non-dominated sorting; and (b) crowding-distance sorting.
Figure 4.
Ranking evaluation using NSGA-II for a bi-objective minimization problem: (a) non-dominated sorting; and (b) crowding-distance sorting.
Figure 5.
Configuration of a reservoir model inspired by the McMurray formation in Athabasca oil sands, Canada.
Figure 5.
Configuration of a reservoir model inspired by the McMurray formation in Athabasca oil sands, Canada.
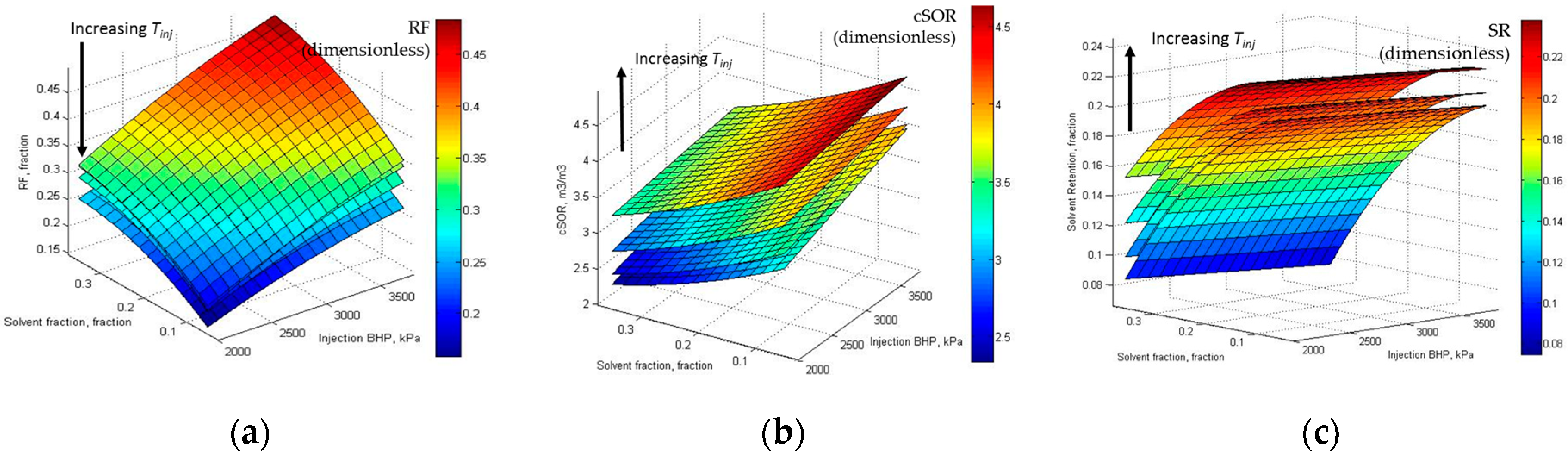
Figure 6.
Response surfaces for the three objectives corresponding to four values of pure-steam injection period Tinj (6, 12, 18, and 24 months): (a) recovery factor (RF); (b) cumulative steam–oil ratio (cSOR); and (c) solvent retention (SR).
Figure 6.
Response surfaces for the three objectives corresponding to four values of pure-steam injection period Tinj (6, 12, 18, and 24 months): (a) recovery factor (RF); (b) cumulative steam–oil ratio (cSOR); and (c) solvent retention (SR).
Figure 7.
Surface plots of the three response functions, i.e., RF, cSOR, and SR, in three-dimensional objective space, which corresponds to four values of steam (without solvent) injection period (6, 12, 18, and 24 months).
Figure 7.
Surface plots of the three response functions, i.e., RF, cSOR, and SR, in three-dimensional objective space, which corresponds to four values of steam (without solvent) injection period (6, 12, 18, and 24 months).
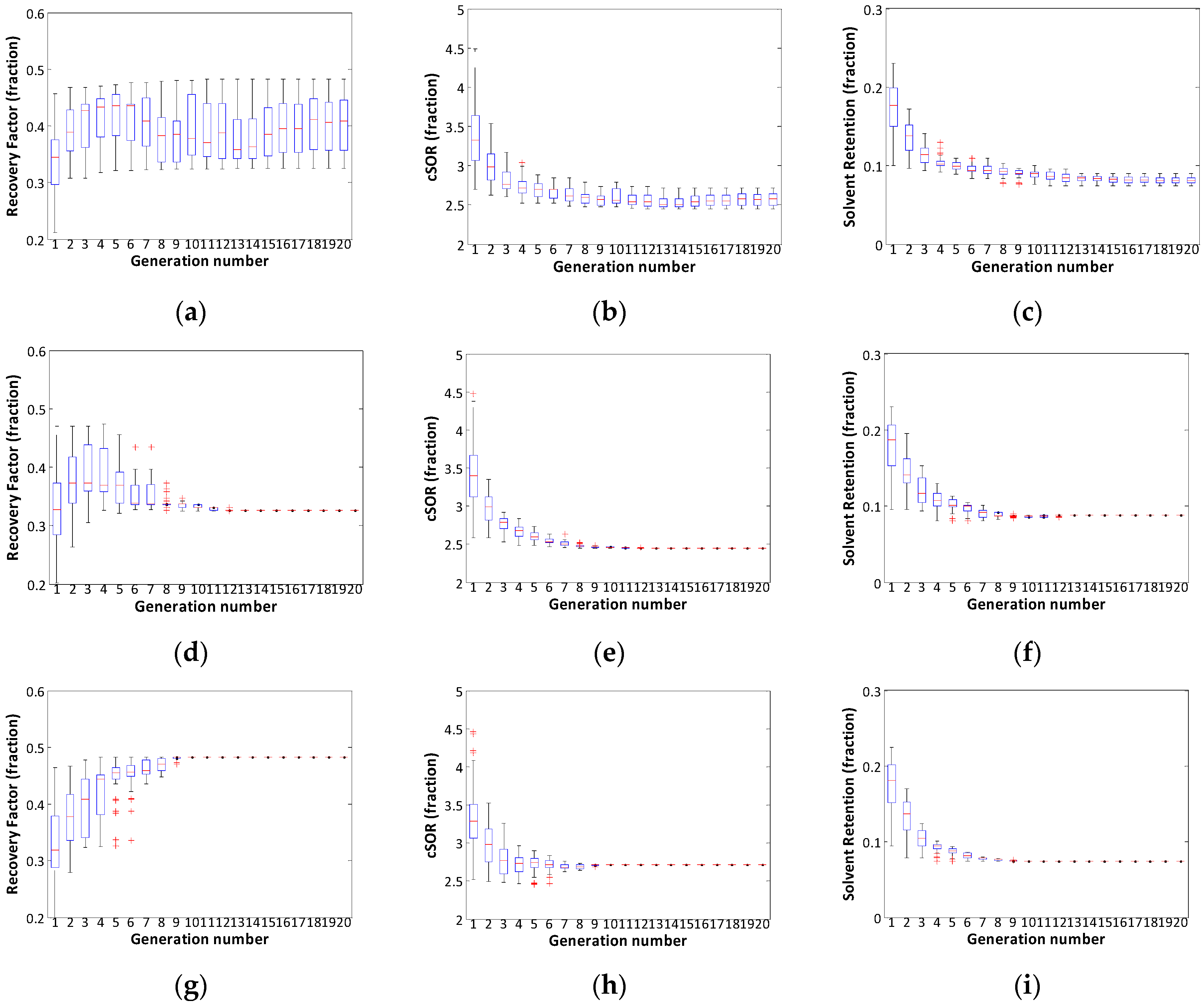
Figure 8.
Evolution of performance indicators of the ES-SAGD process obtained by running global- and multi-objective optimization algorithms: (a) Recovery Factor (RF) obtained by invoking NSGA-II; (b) Cumulative Steam–Oil Ratio (cSOR) by invoking NSGA-II; (c) Solvent Retention (SR) by invoking NSGA-II; (d) RF obtained by invoking GA with Equation (12); (e) cSOR obtained by invoking GA with Equation (12); (f) SR obtained by invoking GA with Equation (12); (g) RF obtained by invoking GA with Equation (13); (h) cSOR obtained by invoking GA with Equation (13); and (i) SR obtained by invoking GA with Equation (13).
Figure 8.
Evolution of performance indicators of the ES-SAGD process obtained by running global- and multi-objective optimization algorithms: (a) Recovery Factor (RF) obtained by invoking NSGA-II; (b) Cumulative Steam–Oil Ratio (cSOR) by invoking NSGA-II; (c) Solvent Retention (SR) by invoking NSGA-II; (d) RF obtained by invoking GA with Equation (12); (e) cSOR obtained by invoking GA with Equation (12); (f) SR obtained by invoking GA with Equation (12); (g) RF obtained by invoking GA with Equation (13); (h) cSOR obtained by invoking GA with Equation (13); and (i) SR obtained by invoking GA with Equation (13).
Figure 9.
Projection of decision variables in two-dimensional variable space before and after optimization. The evolved solution set obtained from multi-objective optimization includes the optimum solution obtained from global-objective optimization: (a) Pinj vs. Tinj; (b) Pinj vs. Sfrac; and (c) Tinj vs. Sfrac.
Figure 9.
Projection of decision variables in two-dimensional variable space before and after optimization. The evolved solution set obtained from multi-objective optimization includes the optimum solution obtained from global-objective optimization: (a) Pinj vs. Tinj; (b) Pinj vs. Sfrac; and (c) Tinj vs. Sfrac.
Figure 10.
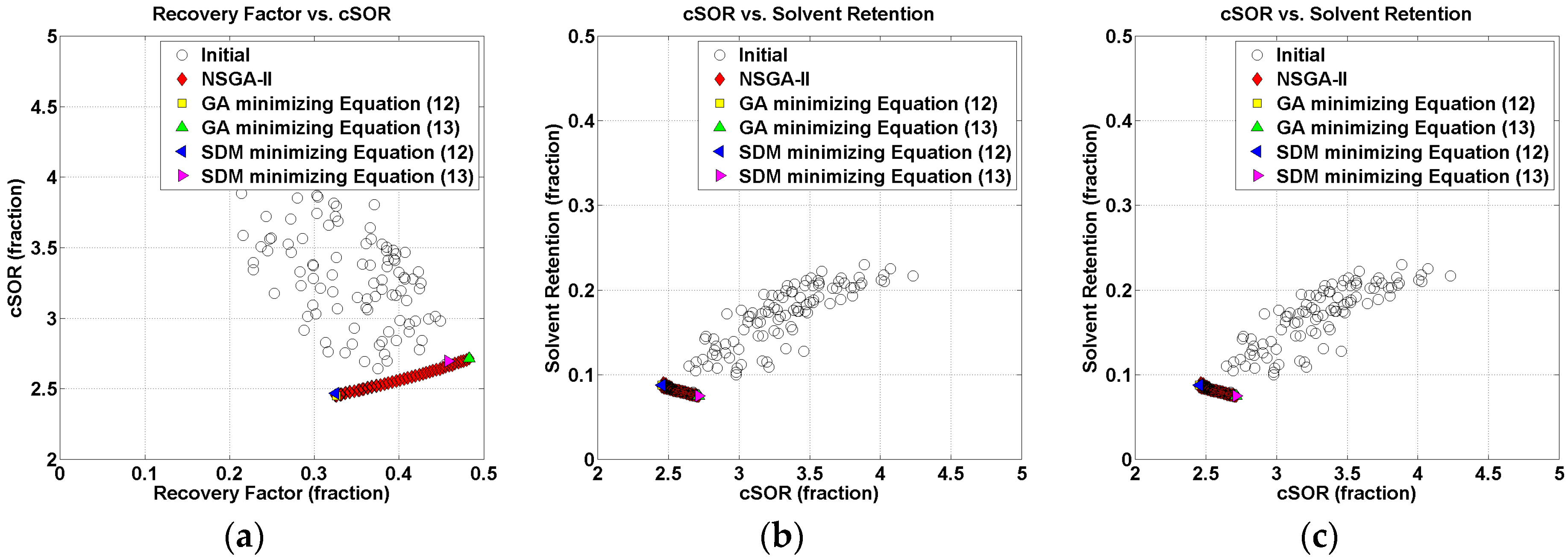
Projection of objective function values in two-dimensional objective space before and after optimization. The evolved solution set obtained from multi-objective optimization includes the optimum solution obtained from global-objective optimization. Positive or negative correlations among the performance indicators of the ES-SAGD process are clearly revealed from the evolved non-dominated solution set: (a) RF vs. cSOR; (b) RF vs. SR; (c) cSOR vs. SR.
Figure 10.
Projection of objective function values in two-dimensional objective space before and after optimization. The evolved solution set obtained from multi-objective optimization includes the optimum solution obtained from global-objective optimization. Positive or negative correlations among the performance indicators of the ES-SAGD process are clearly revealed from the evolved non-dominated solution set: (a) RF vs. cSOR; (b) RF vs. SR; (c) cSOR vs. SR.
Table 1.
Reservoir properties used for optimizing the ES-SAGD process.
Table 1.
Reservoir properties used for optimizing the ES-SAGD process.
| Parameter | Units | Value |
|---|
| Number of gridblocks (I × J × K) | Dimensionless | 250 × 1 × 100 |
| Size of gridblock (I × J × K) | m × m × m | 1 × 500 × 0.48 |
| Porosity | Dimensionless | 0.33 |
| Effective permeability | Darcy | 4.2 |
| Initial reservoir temperature | K | 283.15 |
| Initial bitumen saturation | Dimensionless | 0.85 |
| Residual bitumen saturation | Dimensionless | 0.1 |
| Specific gravity of bitumen | °API | 8 |
| Molecular weight of bitumen | kg/kmole | 581 |
| Molecular weight of water | kg/kmole | 18 |
| Thermal conductivity of bitumen | W/m/K | 0.1 |
| Thermal conductivity of rock | W/m/K | 2.85 |
| Thermal conductivity of water | W/m/K | 0.6 |
Table 2.
Experimental setting of decision variables for proxy modeling and optimization of the ES-SAGD process.
Table 2.
Experimental setting of decision variables for proxy modeling and optimization of the ES-SAGD process.
| Variable | Unit | Lower Limit | Upper Limit | Step Size for Proxy Modeling | Step Size for Optimization |
|---|
| Pinj | kPa | 2000 | 3800 | 450 | 50 |
| Tinj | months | 6 | 24 | 6 | 1 |
| Sfrac | dimensionless | 0.05 | 0.35 | 0.075 | 0.01 |
Table 3.
Maximum and minimum values obtained from 100 simulation results used for training proxy models.
Table 3.
Maximum and minimum values obtained from 100 simulation results used for training proxy models.
| Performance Indicator | Minimum | Maximum |
|---|
| Recovery factor (RF) | 0.158 | 0.483 |
| Cumulative steam–oil ratio (cSOR) | 2.33 | 4.64 |
| Solvent retention (SR) | 0.01 | 0.36 |
Table 4.
Regression coefficient vector c and its p-values for each response surface model.
Table 4.
Regression coefficient vector c and its p-values for each response surface model.
| | RF | cSOR | SR |
|---|
| c | i = 1 | p-value of ci | i = 2 | p-value of ci | i = 3 | p-value of ci |
|---|
| ci0 | 0.352 | 1.2 × 10−92 | 3.266 | 1.7 × 10−92 | 0.178 | 2.0 × 10−62 |
| ci1 | 0.064 | 1.5 × 10−47 | 0.242 | 7.8 × 10−20 | −0.006 | 2.5 × 10−2 |
| ci2 | −0.038 | 6.5 × 10−32 | 0.424 | 2.1 × 10−37 | 0.023 | 3.6 × 10−16 |
| ci3 | 0.060 | 9.1 × 10−45 | −0.488 | 2.1 × 10−40 | −0.053 | 8.9 × 10−37 |
| ci11 | −0.014 | 5.6 × 10−6 | 0.112 | 1.1 × 10−4 | −0.003 | 3.7 × 10−1 |
| ci12 | −0.002 | 6.3 × 10−1 | 0.032 | 2.7 × 10−1 | 0.000 | 5.5 × 10−1 |
| ci13 | −0.008 | 8.9 × 10−3 | 0.052 | 6.4 × 10−2 | 0.011 | 4.4 × 10−1 |
| ci22 | −0.011 | 4.4 × 10−3 | −0.011 | 7.6 × 10−1 | 0.005 | 0.3 × 10−1 |
| ci23 | −0.021 | 6.1 × 10−8 | 0.200 | 2.6 × 10−8 | 0.009 | 3.0 × 10−1 |
| ci33 | −0.022 | 8.4 × 10−8 | 0.081 | 2.3 × 10−2 | −0.020 | 9.8 × 10−2 |
Table 5.
Coefficients of determination for the three response surface models.
Table 5.
Coefficients of determination for the three response surface models.
| Parameter | RF | cSOR | SR |
|---|
| R2 | 0.96 | 0.93 | 0.86 |
| Mean square error | 3.0 × 10−4 | 2.1 × 10−2 | 3.0 × 10−3 |
Table 6.
Experimental setting used for multi-objective genetic algorithm.
Table 6.
Experimental setting used for multi-objective genetic algorithm.
| Parameter | Value |
|---|
| Number of generations | 20 |
| Population size | 100 |
| Probability of crossover | 0.9 |
| Probability of mutation | 0.1 |
Table 7.
Decision variables and performance indicators obtained by running the hybrid multi-objective optimization approach.
Table 7.
Decision variables and performance indicators obtained by running the hybrid multi-objective optimization approach.
| Non-Dominated Solutions | RF | cSOR | SR | Pinj | Tinj | Sfrac |
|---|
| Solution 1: with the greatest RF, | 0.483 | 2.714 | 0.075 | 3800 | 6 | 0.35 |
| the greatest cSOR, |
| and the lowest SR |
| Solution 2: with the lowest RF | 0.325 | 2.453 | 0.086 | 2000 | 6 | 0.35 |
| Solution 3: with the lowest cSOR | 0.326 | 2.451 | 0.088 | 2000 | 7 | 0.35 |
| Solution 4: with the greatest SR | 0.332 | 2.463 | 0.090 | 2050 | 8 | 0.35 |
Table 8.
Correlation coefficients between performance indicators obtained from the initial and final solutions of the hybrid multi-objective optimization approach.
Table 8.
Correlation coefficients between performance indicators obtained from the initial and final solutions of the hybrid multi-objective optimization approach.
| | Initial Solution Set | | Final Solution Set |
|---|
| | RF | cSOR | SR | | RF | cSOR | SR |
|---|
| RF | 1.000 | −0.494 | −0.771 | RF | 1.000 | 0.997 | −0.979 |
| cSOR | −0.494 | 1.000 | 0.825 | cSOR | 0.997 | 1.000 | −0.973 |
| SR | −0.771 | 0.825 | 1.000 | SR | −0.979 | −0.973 | 1.000 |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}