
A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles



1
Escuela Superior de Ingenieria Mecanica y Electrica, Unidad Culhuacan, Instituto Politecnico Nacional of Mexico, ESIME Cul. Av. Santa Ana No. 1000, Col. San Francisco Culhuacan, C.P. 04430 Mexico City, Mexico
2
Electrical Engineering Department, Universidad de Talca, Merced 437, C.P. 3341717 Curicó, Chile
*
Author to whom correspondence should be addressed.
Energies 2017, 10(9), 1386; https://doi.org/10.3390/en10091386
Submission received: 9 August 2017
/
Revised: 3 September 2017
/
Accepted: 8 September 2017
/
Published: 12 September 2017
(This article belongs to the Special Issue Energy Storage Systems and Power Conversion Electronics for E-Transportation and Smart Grid)
Abstract
:A study of the fundamental of operation of a three-phase AC-DC power converter that uses Zero-Voltage Transition (ZVT) together with Space Vector Pulse Width Modulation (SVPWM) is presented. The converter is basically an active rectifier divided into two converters: a matrix converter and an H bridge, which transfer energy through a high-frequency transformer, resulting in a modular AC-DC wireless converter appropriate for Plug-in Electric Vehicles (PEVs). The principle of operation of this converter considers high power quality, output regulation and low semiconductor power loss. The circuit operation, idealized waveforms and modulation strategy are explained together with simulation results of a 5 kW design.
1. Introduction
AC-DC power converters are typically used in Plug-in Electric Vehicles (PEVs) that require high reliability, reduced total harmonic distortion (THD) of the drawn currents and output regulation to charge batteries or supercapacitors with high performance and satisfy stringent power quality and density standards [1,2,3]. Electric Vehicle (EV) systems need to consider power quality regulations that typically include the harmonic emission during the charging and transient states, which have been analyzed with different standards and methods as the works described in [4,5]. Moreover, high-frequency switching techniques can increase the power quality, density and energy transfer reliability of AC-DC power converters without altering the basic topology configuration, keeping output controllability and reliability [6]; however, high AC line currents, drawn by the converter to rapidly charge the storage devices distributed along the traction DC link of the EV, may endanger the EV charger operator or impair the charger connector and, therefore, the supply drawn currents are limited to gain reliability causing slow energy transfer [7].
An available method of ensuring operator reliability with high currents, obtaining a simple way of connecting the charge uses wireless power transfer [8,9,10]. This is a twofold method, since the technique commonly uses a transformer to effectively isolate the power transfer from the user, and provides possible circuit splitting since the transformer is operated as an intermediary between two modules. For example, the converter presented in [11] uses a Medium-Frequency-Transformer for wind power conversion applications; however, the system uses an indirect matrix converter with three output phases that increases the circuit complexity and the magnetic components. EVs typically us two modules, where the first module is located on a charging station and the other on board the vehicle, improving the power density of the converter and increasing the EV distance range since the on-board section may be free of heavy devices [12]. The use of a single-phase high-frequency transformer was proposed in [13] as a wireless device to convert power from the utility to a DC-link capacitor bank; however, the circuit incurs in the use of several power stages required to generate high-frequency power signals from the utility supply to the transformer, limiting the efficiency of the converter and causing high complexity.
This paper presents the principle of operation of a modular AC-DC converter with Zero-Voltage Transition (ZVT), whose aim is to produce high-quality current waveforms, output regulation and soft switching of the semiconductor devices through the use of an off-board current-feed matrix converter and an on-board high-frequency H bridge, in such a way that the size of the converter located inside the vehicle becomes reduced in contrast with other topologies, [14,15,16]. The method potentially exhibits the following advantages: first, the current-feed matrix converter is used for straightforward generation of low-ripple, AC line currents without the need of several power stages; second a high-frequency transformer is used to isolate the matrix converter from the H bridge and regulate the output voltage; and third, the circuit uses a ZVT technique together with Space Vector Pulse Width Modulation (SVPWM) to achieve soft commutation of the power semiconductors and generate high-quality sinusoidal currents. Simulation results obtained in Saber with a 5 kW model are provided in the article, demonstrating the correspondence with the developed theoretical background and idealized waveforms to verify its feasibility.
2. ZVT AC-DC Converter
2.1. Circuit Description
The topology arises from the idea of splitting a conventional active rectifier in two modules as is shown in Figure 1. The off-board module of the converter is a three-phase current fed matrix converter that generates a single phase high-frequency current. This converter is intended to be located outside the electric vehicle in the charging station. The matrix converter has six bi-directional switches (Q1–Q6) and is fed by the line current of inductors L. The primary side of a high-frequency transformer is connected at the output of the matrix converter to allow wireless power transfer between the matrix converter and the second module.
The on-board module uses the secondary side of the high-frequency transformer and a series inductor, Ls, partially formed by the transformer leakage inductance and an additional inductor, together with an H bridge to regulate the output voltage, Vo. The H bridge inverts the output voltage with a phase-shifted Pulse Width Modulation (PWM) technique, such that a quasi-square with a ±nVo amplitude is generated on the primary side of the transformer, vprim. In this way, the conventional SVPWM technique is modified to obtain three-level PWM voltage waveforms which are used to control the line currents together with the supply voltage.
2.2. Principle of Operation
The control strategy used in the AC-DC converter is based in a SVPWM technique allowing DC output voltage regulation using an index modulation, being easy to implement with a fast response compared to other methods of PWM [17,18,19]. The conventional SVPWM technique is modified with a ZVT strategy, in such a way that the semiconductor devices are soft switched. The fundamental of operation of the SVPWM technique with ZVT is described below assuming negligible output voltage ripple and lossless components. Figure 2a–c show the active rectifier switching states, Sa, Sb and Sc, of a conventional SVPWM scheme for one switching period in the first sector, which ranges from 0° to 60°, where 1 and 0 indicate on and off states respectively. These switching states are splitted to define the switching states of the H bridge and those of the matrix converter.
The H-bridge switching states Sx and Sy are presented in Figure 2d,e, with a duty cycle of 50% and a short-circuit period, TSV0H, that generates the voltages vxG (Figure 2f), and vyG (Figure 2g) referred to the G node of the DC rail. The H-bridge voltage (Figure 2h), vxy = vxG − vyG, clamps the secondary side of the transformer to zero Volts when the H bridge is in the short-circuit state. During the first semi cycle, ∆T/2, the voltage in the secondary side of the transformer, vsec, is clamped to Vo and the switching states of the matrix converter legs, Sam, Sbm and Scm (Figure 2i–k) are equal to Sa, Sb and Sc respectively. When Sa, Sb and Sc are equalized in the three inverters legs, a short-circuit occurs; which is caused in the modular version through the H bridge during TSV0H, such that the matrix converter retains the last switching state combination. During the second semi cycle, a mirrored state sequence occurs, since the output voltage in the H bridge becomes vsec = −Vo and the switching states in the matrix converter are the complement of Sa, Sb and Sc. The H-bridge short-circuit is caused again and the matrix converter retains the last switching states when Sa, Sb and Sc are equal. In this way, the neutral combination is again caused by the H bridge instead of the matrix converter.
The matrix converter voltages referred to the DC rail node G, vacG, vbcG and vccG are shown in Figure 2l–n, which are the product of the primary voltage vprim (vprim = nvsec) and the individual switching state of each leg. When the short-circuit is caused by the H bridge, the matrix converter voltages are clamped to zero Volts.
2.3. SVPWM Technique
Six active voltage space vectors, sv1 to sv6, are obtained at the central nodes of the matrix converter shown in Figure 1b by using six switching states combinations, SQ1 to SQ6, which are listed in Table 1, with respect to the states of Sam, Sbm and Scm. These space vectors are plotted in the bi-dimensional α-β plane of Figure 3 using the Clarke transform [20]. sv1 to sv6 are generated using the switching states of the matrix converter together with its output voltage ±nVo. A neutral space vector, sv0, is produced by using any state combination of the matrix converter together with the H-bridge short-circuit. sv0 is located at the origin of the α-β plane.
An arbitrary averaged voltage vector, vcav = Vcpk∟θc, can be generated at the converter input using a Volts-seconds balance to control the input line currents together with the supply voltages. Since the matrix converter output voltage reverses its biasing during half of the switching cycle, the Volts-seconds balance utilises the operating sector and its opposite sector of the α-β plane. For example, during the first semi cycle of a switching period in sector S1, vcav is determined by:
where , and .
Whereas, during the second semi cycle, vcav is defined by:
where , , since vprim = −nVo.
The same procedure applies for the rest of the sectors. Table 2 summarizes the switching states according to the sector location of θc together with the biasing of vprim.
vxy and vsec are shown in Figure 4a,b respectively for straight comparison to describe the generation of the secondary transformer current, iLS, shown in Figure 4c. During the first semicycle, iLS is assumed positive together with vsec clamped to Vo. The slope of iLs is negative since the converter voltage is greater than the AC supply voltage even when the matrix converter switches from SQ1 to SQ2; whilst during the H-bridge short circuit the matrix switching state SQ2 is retained, such that the slope of iLS is inverted. A current reversal occurs in iLs since vxy is clamped to −Vo and vsec to zero during an overlap period Tovl that is calculated with Equation (3):
where Iprimpk is the peak magnitude of the current in the primary side of the transformer, iprim.
In this way, the ZVT is performed in the semiconductor devices during the current reversal to obtain soft commutation. The overlap period finishes when iLS reaches the same magnitude with an opposite sign, such that the first semi cycle becomes to an end. The second semi cycle is a mirror of the first since the complementary switching states of SQ1 and SQ2, SQ4 and SQ5 respectively, are used to operate the matrix converter and because the H bridge has clamped vxy to −Vo.
iLs is equal to niprim, where iprim depends on the switching of the line currents. Table 3 lists the equivalence of iprim respective to the line currents and the matrix switching states.
3. ZVT AC-DC Converter
A block diagram for the AC-DC operation of the circuit of Figure 1b is shown in Figure 5. In this figure θc and the index modulation, Ma, are the inputs required for the SVPWM scheme. Since the converter of Figure 1b is divided into two parts, a sequenced operation is used and described below:
- (a)
- The conventional active rectifier switching states are generated using Ma and θc. These are equivalent to the control signals of Figure 2a–c.
- (b)
- Sam, Sbm and Scm, shown in Figure 2i–k, are generated and multiplexed to assign the control signals for each bi-direccional switch.
- (c)
- Sx and Sy, shown in Figure 2d,e, are generated from the active periods of the conventional active rectifier.
- (d)
- An overlap is required to turn on and off the bidirectional switches during the reversal of current iLS.
3.1. H-Bridge and Matrix Converter Switching States
The derivation of the H-bridge and matrix converter control switching states is described using the block diagram of Figure 6, which are obtained from the switching states of the conventional active rectifier, as described in Section 2.2. Firstly, Sa, Sb and Sc are generated using θc and Ma. The conventional SVPWM active periods, Ta, Tb and Tc, are compared with a high-frequency carrier triangular waveform to produce three digital signals, PWMa, PWMb and PWMc, which are shown in Figure 7. These signals are multiplexed with respect to the sector location to derive the switching states Sa, Sb and Sc, (Figure 7e–g). The H-bridge switching states, Qa, Qc, Qb an Qd, are obtained with a sequential circuit using Sa, Sb and Sc as inputs.
Other set of multiplexers are utilized to derive three digital signals, Sa’, Sb’ and Sc’, that produce the active switching states by using off and on states instead of the short and long pulse trains of PWMa and PWMc respectively, as is shown in Figure 7h–j. Sa’, Sb’ and Sc’ are also multiplexed with respect to the sector location and are processed to derive the switching state of each matrix converter leg. The digital circuit to generate the matrix converter control signals for the first leg, Q1a, Q1b, Q4a and Q4b, is shown at the right-hand of Figure 6. This circuit commutates the switching states to the opposite side of the α-β plane, sending the complement states when vsec is clamped to negative voltage. The same circuit is used to generate the control signals for the second and third matrix converter legs.
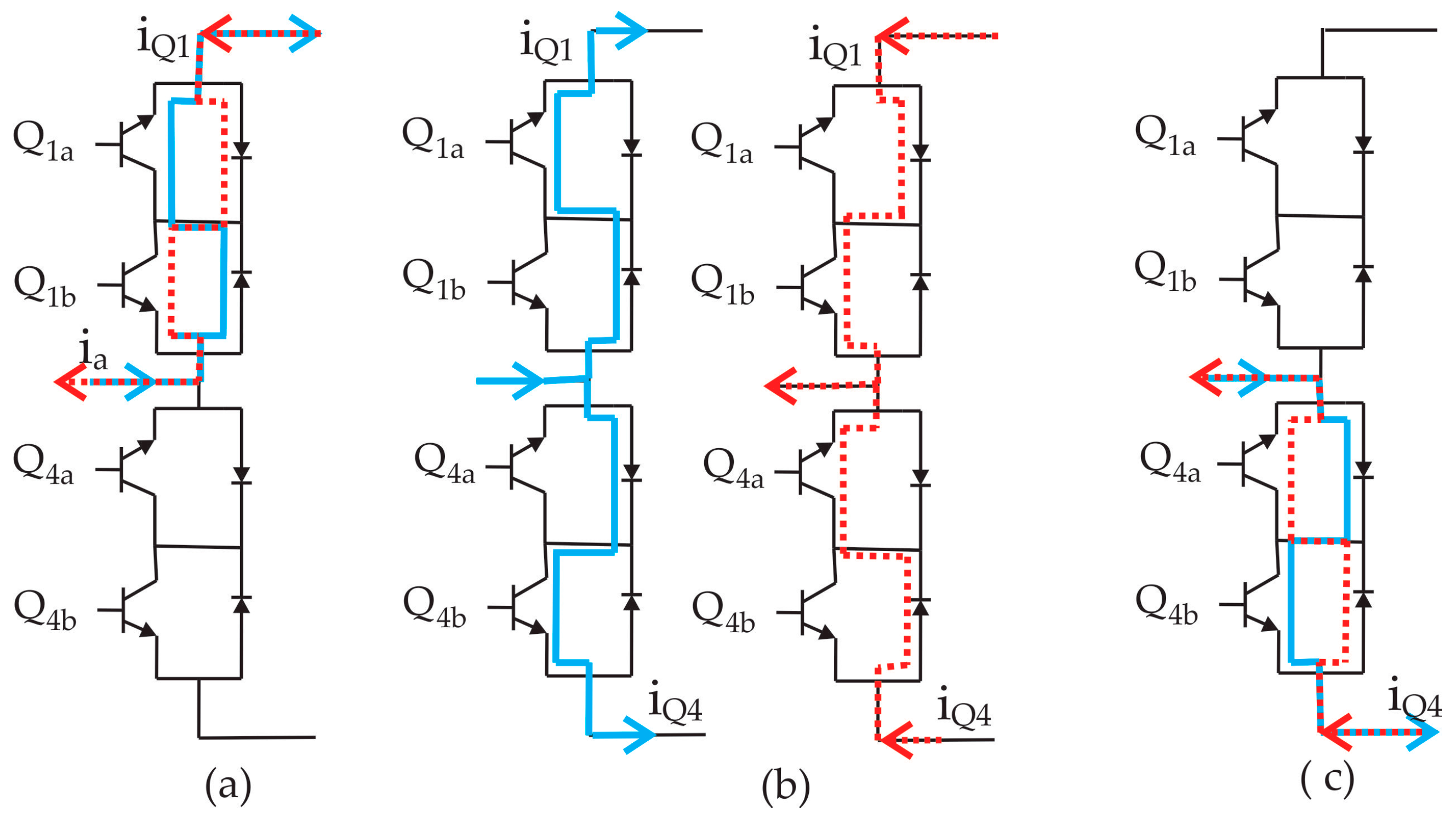
3.2. Neutral-to-Active Switching Transition in the Matrix Converter
Since each bi-directional switch in the matrix converter is built with two semiconductor devices with a common collector configuration that allows the current flow in both directions, an overlap in all the matrix converter legs is required to commutate the flowing of current in one direction to the opposite direction during the negative biasing of vsec. Figure 8 shows the switching sequence of Q1a, Q1b and Q4a, Q4b to turn off Q1 and turn on Q4.
In Figure 8a, Q1a and Q1b are conducting the current in the blue or red arrow direction, iQ1. When Q1 and Q4 are commutated to the on and off states respectively, Q1b is turned off and Q4b is turned on when the current is flowing in the blue arrow direction; and Q1a is turned off and Q4a is turned on when the current is flowing in the red arrow direction (Figure 8b). Finally, when the current flow stops due to the biasing inversion of vsec through the corresponding arrow, the transistors of Q4 are turned on, (Figure 8c), and, therefore, the current in Q4, iQ4, flows in the opposite direction through the matrix converter leg.
The logic circuit that generates the overlap in the first matrix converter leg is included in the right-hand of Figure 6. This diagram shows the zero crossing detector signals Cz1 and Cz2 that are used to indicate the end of the overlap.
3.3. Active-to-Active Switching Transition in the Matrix Converter
The transition between two active vectors takes place twice in a switching period. In Figure 2a the transition occurs from SQ1 to SQ2 during the first semi cycle; whereas in the second semi cycle, the transition occurs from SQ5 to SQ4. The transition between adjacent active vectors implies a switching state change in one matrix converter leg. By instance, the state of the second matrix leg, Sbm in Figure 2, switches from the off to the on state producing an active-to-active transition. The turn on-to-off sequence of Q3 and Q6 is shown in Figure 9.
In Figure 9a, Q6a and Q6b are firstly turned on and the current flows in the red or blue arrow direction, iQ6; then, in Figure 9b Q6a and Q3a are turned off and on respectively to allow the current reversal in the matrix converter leg when the current is flowing in the blue arrow direction; or Q6b and Q3b are turned off and on respectively to allow the current reversal when the current is flowing in the red arrow direction. In this figure, the transistors of Q6 are turned on for a period of time tD longer than the turning off time of the semiconductor device, tr, to guarantee that the current stops flowing through it. This bidirectional switch configuration comes to an end when the transistor of Q6 is turned off as shown in Figure 9c. Lastly, the sequence finishes by turning on transistors of Q3, as shown in Figure 9d, with iQ3 flowing in the opposite direction.
4. Steady-State Analysis and Parameters Selection
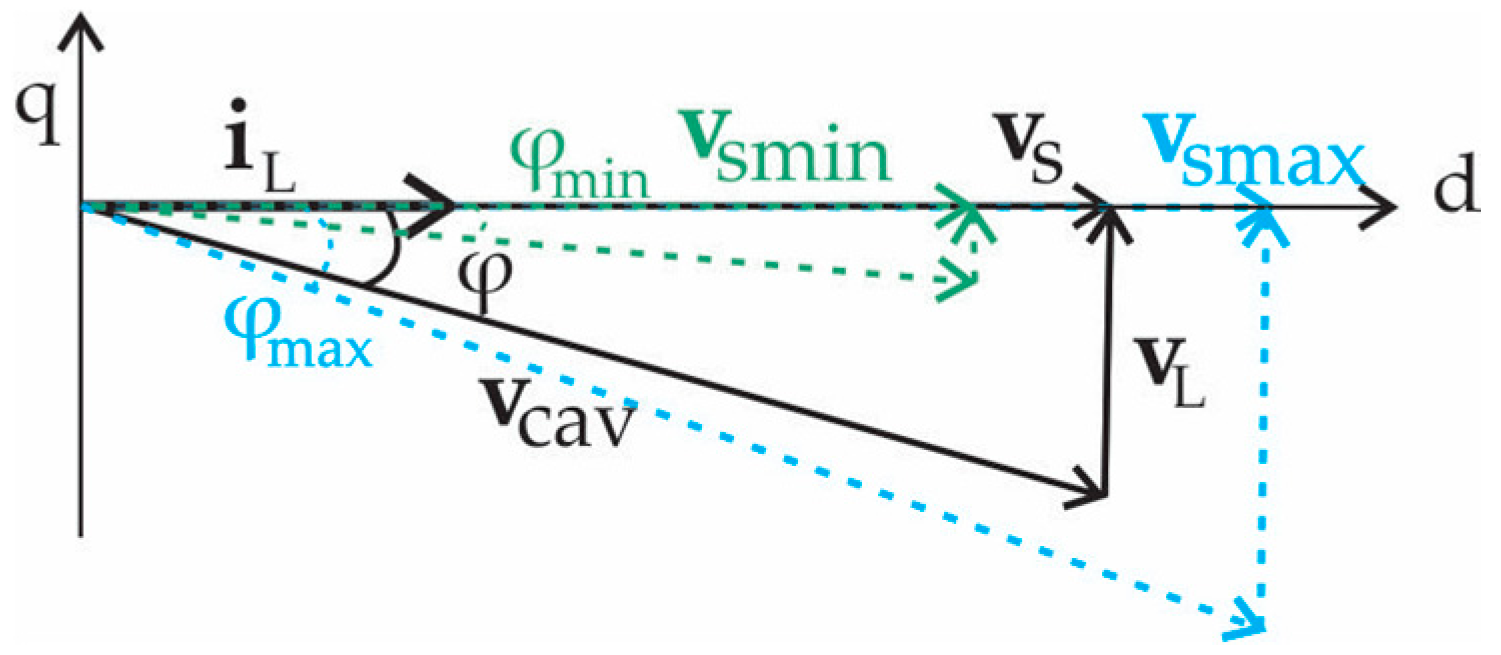
A steady-state analysis of the AC-DC modular converter is derived using the generalized diagram of Figure 10, where vs is the three-phase source voltage vector, L is the line inductor, vL is the line inductor voltage vector, vcav is the converter voltage vector, n:1 is the transformer turns ratio that links the off-board AC-AC module with the AC-DC module; Vo is the DC output voltage and R is the output load.
Assuming a vectorial current control to drive the phase and magnitude of the line current iL and produce high power factor, a phasorial diagram is shown in Figure 11 which describes the behavior of the AC-DC converter of Figure 1. In this diagram, vs, vL and vcav are defined by:
vs = Vspk∟0°,
vL = VLpk∟90°,
vcav = Vcpk∟ϕ°
Whereas the current iL is obtained with Equation (9):
Equations (9) and (10) are used to derive the amplitude of iL, ILpk, which is defined by:
where ω = 2πf. Assuming ideal conditions, a power balance is derived:
where Pin and Pout are the input and output power converter respectively and are equivalent to Equation (13):
Substituting Equation (11) in (13), the power balance becomes:
According to Figure 11, the AC-DC converter can operate under two extreme conditions; a minimum supply voltage, Vspkmin, obtaining a maximum phase, ϕmax, with a maximum power demand at the output, Pomax; and a maximum supply voltage, Vspkmax obtaining a minimum phase, ϕmin, with a minimum power demand at the output, Pomin. Therefore, ϕmax and ϕmin are obtained using Equations (15) and (16) respectively:
Considering Pomax = 5 kW, Pomin = 500 W, Vspkmin = 144 V and Vspkmax = 216 V, ϕmax and ϕmin are obtained for different values of L. Figure 12 is used to select the optimal L that allows an appropriate range of phase control. L was judged to be 3 mH, in such a way that ϕ can be ranged from 0.46° to 10.3°.
The voltage Vcpk is expressed in function of the modulation index, Ma, when the converter operates with a SVPWM scheme [14], as follows:
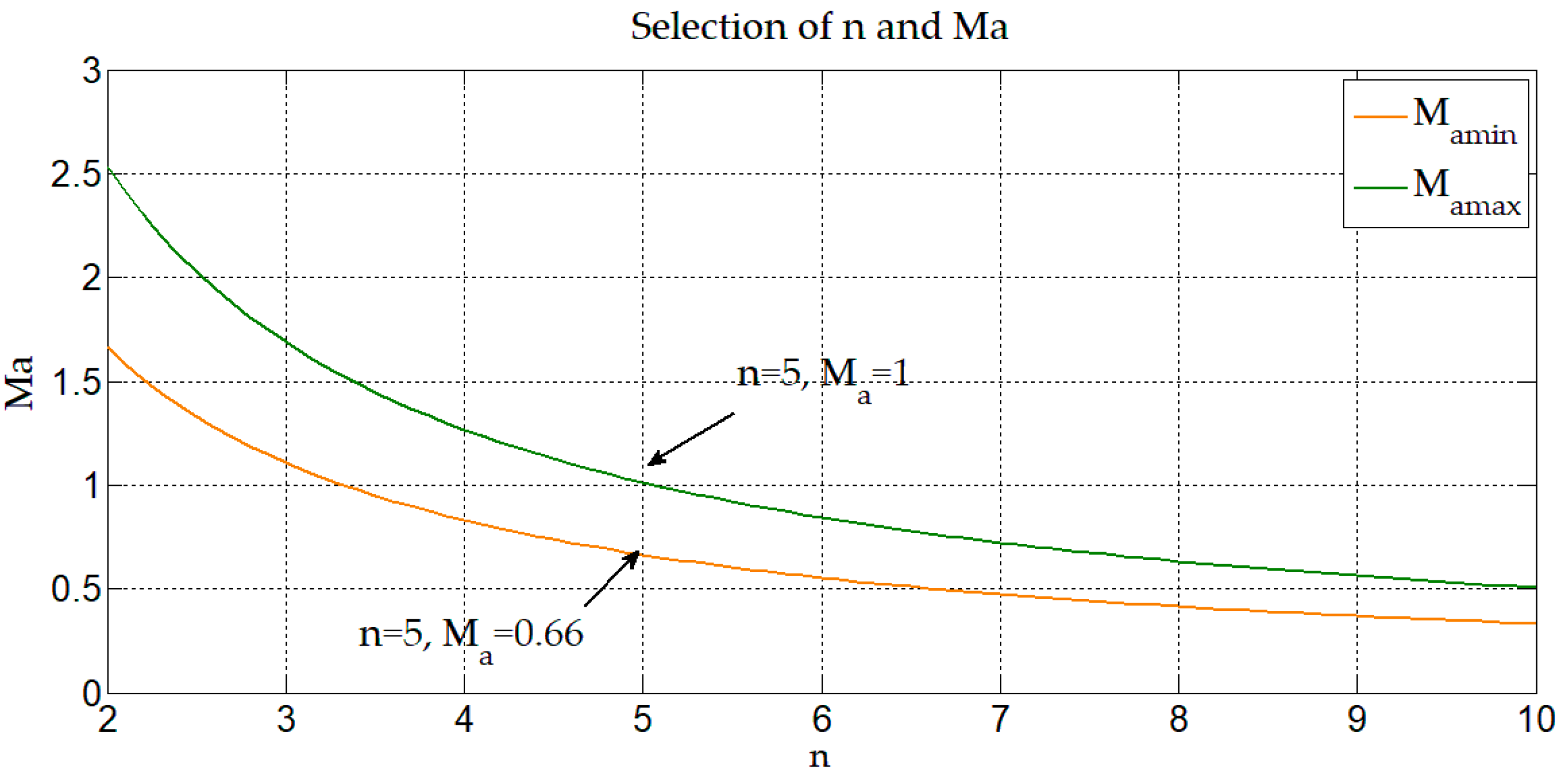
The minimum and maximum converter voltages, Vcpkmin and Vcpkmax, are utilized to obtain the minimum and maximum modulation indexes, Mamin and Mamax respectively, which are shown in (18) and (19):
where Vcpkmin = 144.004 Volts and Vcpkmax = 219.53 Volts were calculated using Equation (7) for Vspkmin and Vspkmax respectively. An optimal value for n was determined by using Equations (18) and (19) and ranging n from 2 to 10, such that the results are plotted in Figure 13. n was selected to be 5 since Ma can be set between 0.66 and 1 to control the amplitude of the converter input voltage. It was judged in this work that n should be 5 to allow the converter an appropriate SVPWM operation and leave a small upper range of Ma for the ZVT effects since the maximum value of Ma is 1.16 for SVPWM [20].
Equations (14) and (17) show that there is a compromise between the selection of the parameters n, ϕ and L to reach a wide range of Ma within the conventional active rectifier operation range.
5. Numerical Verification
To verify the principle of operation of the modular AC-DC converter and the SVPWM with ZVT control strategy, a simulation in Saber was performed using ideal components and the parameters listed in Table 4.
5.1. Verification of the Modified SVPWM
A Saber simulation was performed synchronizing the operation of the divided rectifier control signals with the fundamental frequency of the supply, using the scheme of Figure 14. ILpk is the current reference used to define θc and Ma for the SVPWM operation of the rectifier and cause high power factor as shown in Figure 11. The converter voltage was phase shifted to align the line currents with the supply using the vectorial control system of Figure 14. A reference current of ILpk = 19.54 A was used to obtain a 100 V, 5 kW output with high power factor supply. The component of Vcav in the q axis, Vcavq, was determined using Equation (7) and the phasorial diagram of Figure 11, Vcavq = 22.1 V, such that Vcavd = Vspk = 180 V, therefore, the phase between vs and vcav was φ = 7°.
To confirm the correct operation of the scheme shown in Figure 14, Figure 15 shows a Saber result plot of the supply and converter phases, θS and θC, for current references of 9.4 A and 19.54 A and cause 2.5 kW and 5 kW respectively. In Figure 15a a phase shift of 3° is obtained, whereas in Figure 15b the phase shift becomes of 7° since the current reference was increased. The effectiveness of the SVPWM rectifier operation of the circuit of Figure 1b was verified analyzing the Saber simulation results of the line currents and input voltages of the converter. Figure 16a shows Saber results of the source voltage vaN and the line current ia. The resultant line current ia is sinusoidal with a 3.3% ripple. Figure 16b shows the five-level converter voltage, vacN, to verify the correct operation of the space vector strategy. The current and voltage in the primary side of the transformer, iprim and vprim are shown in Figure 16c, where iprim is the rectified version of the line currents, but, inverted in one quadrant of the switching cycle producing a high-frequency AC square current.
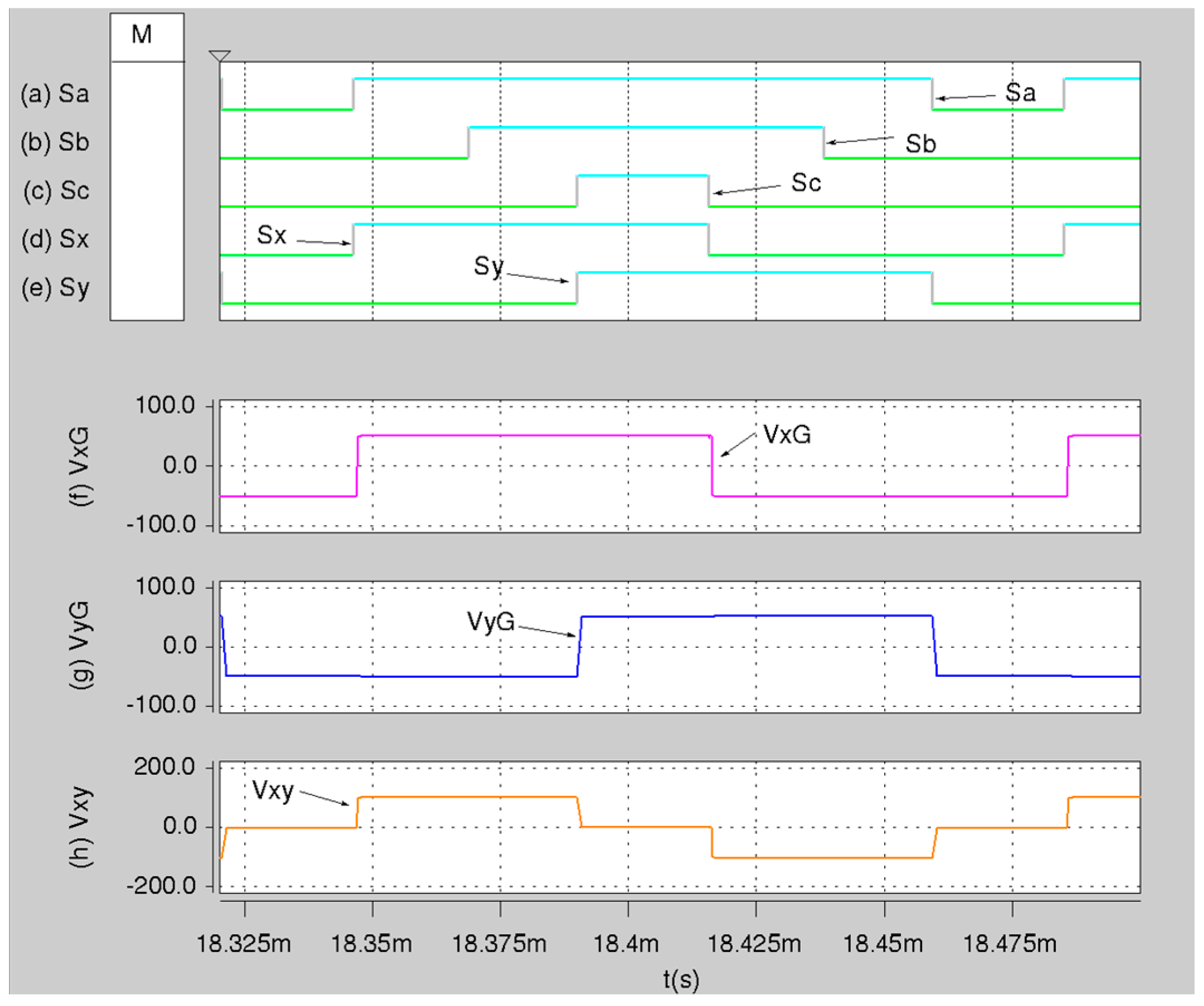
The operation of the H bridge was verified contrasting the conventional SVPWM states with the phase-shifted control signals of the H bridge. Figure 17 plots the Saber results of Sa, Sb and Sc (Figure 17a–c, respectively) in contrast to Sx and Sy (Figure 17d,e). The H-bridge input voltages vxG and vyG are shown in Figure 17f,g, respectively, and its difference vxy is shown in Figure 17h. In the latter figure, vxy is a ±Vo quasi-square waveform, whose zero level is effectively produced by the H-bridge overlap, which can be used to produce the neutral vectors required by the conventional rectifier states in a switching cycle.
The SVPWM strategy for the divided AC-DC converter of Figure 1b was verified by contrasting a switching cycle of the states Sam, Sbm and Scm with Sa, Sb and Sc. The upper plot of Figure 18 shows Sa, Sb and Sc together with Sam, Sbm and Scm; whilst the three-phase input converter voltages with respect to the G node of the DC link, vacG, vbcG and vccG, are shown in the lower plots of Figure 18 (Figure 18g–i) for straightforward comparison with those plotted in Figure 2. In these plots vacG and vccG are positive and negative rectified waveforms of vxy; furthermore, vbcG becomes a fully AC waveform due to the state reversals of the matrix converter leg since this switching cell utilizes the active-to-active switching transition.
5.2. ZVT Verification
The effects of the ZVT in the transistors of the matrix converter were initially verified analyzing the quasi-square voltages vxy and vsec together with the transformer secondary current, isec = iLs, as shown in Figure 19 for direct comparison with Figure 4. In Figure 19a,b, during the first semi cycle, vxy and vsec are clamped to Vo such that iLs (Figure 19c) has a smooth negative slope; however, this slope becomes positive when the H bridge is in its overlap state to produce a neutral voltage vector at the converter AC input. A expanded portion of the first semi cycle of iLs is shown in Figure 19d.
At the beginning of the second semicycle, iLs is reversed in an overlap period of TovL = 3 µs, as shown in the expanded portion of Figure 19e, which was confirmed using Equation (3), since vxy and vsec are now clamped to −Vo and zero respectively; whereas the rest of the second semicycle iLs becomes a mirrored wave of the first, which is shown in the expanded portion of Figure 19f. iLs is an AC trapezoidal waveform that is shaped by the switched operation of the H bridge and the matrix converter, which needs to be controlled to ensure stability and prevent saturation by the aid of a DC blocking capacitor, or a peak current control [21], since a high-frequency transformer is used in the proposed converter.
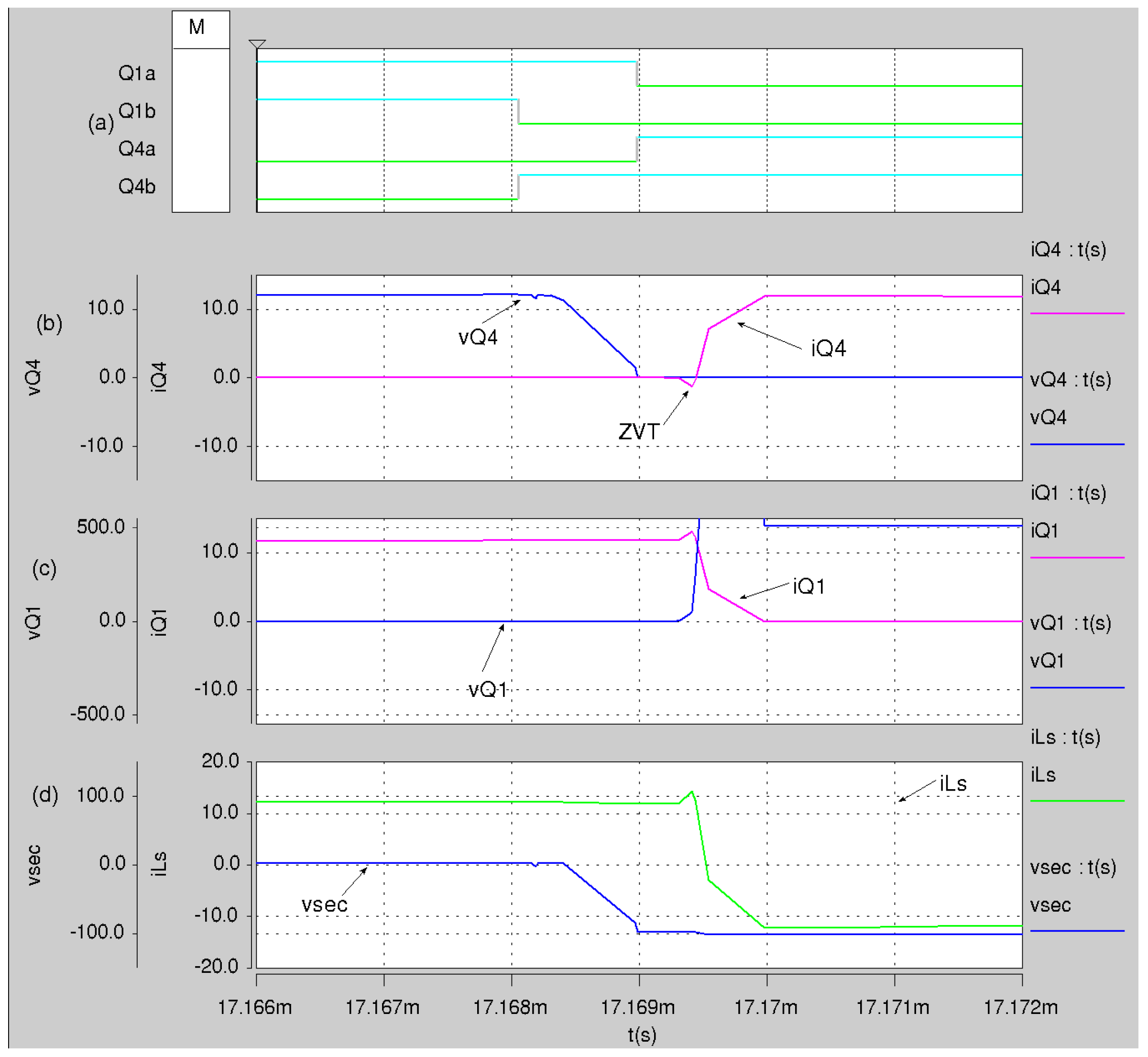
A zero-voltage switching transition is achieved in the matrix converter legs due to the zero-voltage biasing of its bidirectional switches whilst iLs is being reversed. This was verified analyzing the voltage and current waveforms in the first matrix leg switches Q1 and Q4 when an iLS reversal occurs. Figure 20 depicts the simulated switching transition result described in Figure 8 to turn on Q4 and turn off Q1.Initially in Figure 20, the switches of Q1, Q1a and Q1b, and those of Q4, Q4a and Q4b, are in the on and off states respectively. Later in Figure 20a, Q1a and Q4a have an overlap period that cause to the voltage of Q4, vQ4, decrease to zero, and then iQ4 increases as shown in Figure 20b, achieving a ZVT turn on in Q4 during the current reversal. Whereas iQ4 increases, iQ1 falls to set Q1 to the off state, as shown in Figure 20c, which depicts a hard switch off transition. During the overlap, vsec is clamped to zero and then biased to −Vo at the end of the overlap, whilst the current reversal in iLs occurs (Figure 20d).
Figure 21a shows the simulated results of the opposite switching transition to turn on Q1 and turn off Q4. Mirrored waveforms are obtained for iQ1, iQ4, vQ1 and vQ4 in contrast to Figure 20. The ZVT is shown in Figure 21b when iQ1 becomes positive during the zero voltage in Q1. vsec is clamped to +Vo whilst iLs is reversed.
5.3. Steady-State Power Balance Verification
To verify the input-to-output active power balance, the DC output power was calculated by the aid of the H-bridge output current irect. The current iLs and irect are shown in Figure 22a,b, respectively. In these figures iLs is seen to be rectified by the H bridge since irect may become either ±iLs, during the ±Vo clamping of vxy respectively or zero when the H bridge is in its short-circuit state. The average or irect, Irect, was calculated using the simulation results shown in Figure 22, and it was found that Irect = 50 A and, therefore, the output power is 5 kW, since the Saber simulation was performed assuming a constant DC output voltage of Vo = 100 Volts. In this fashion, the output power equalizes the active supply power, demonstrating the principle of operation of the AC-DC divided converter of Figure 1b.
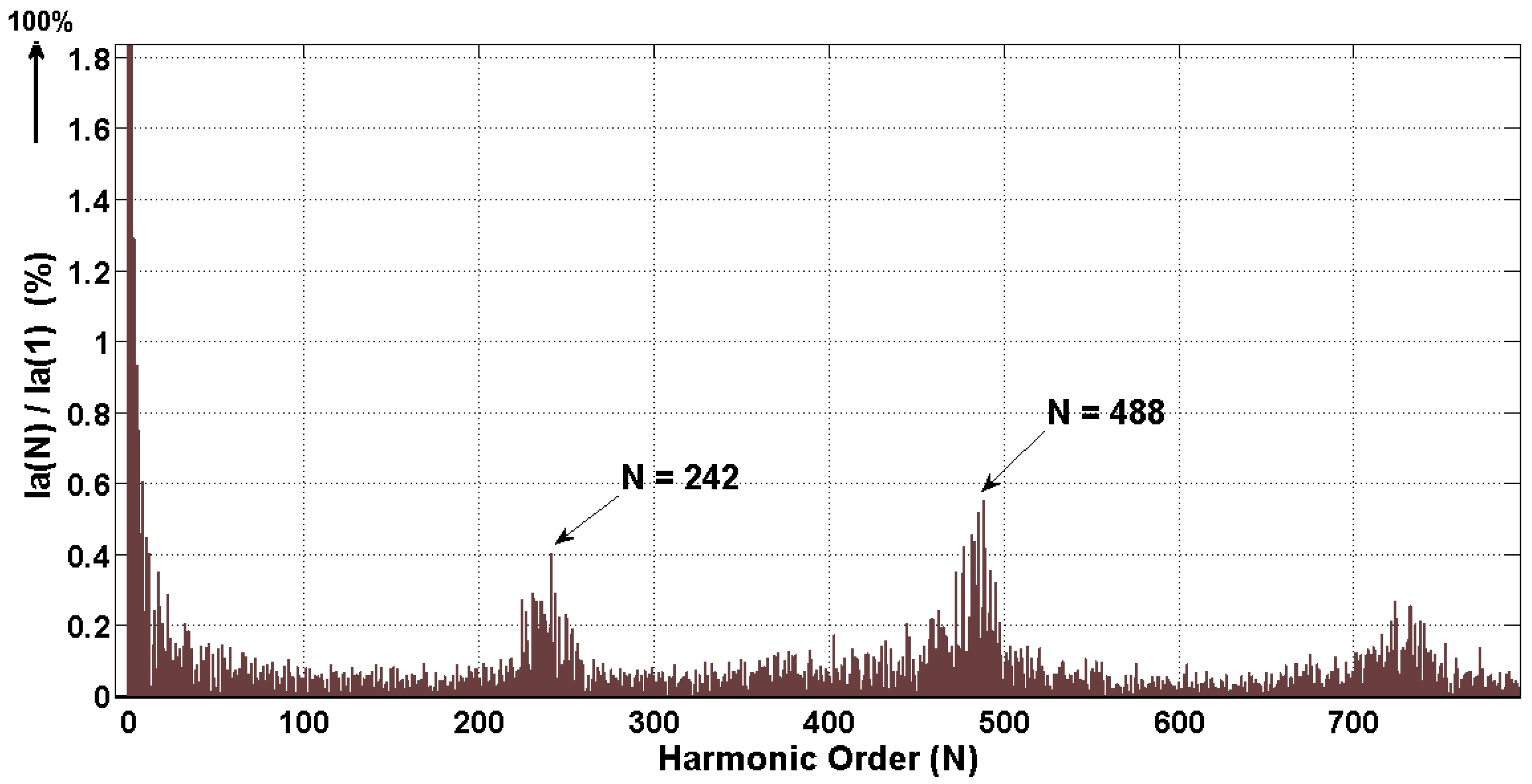
To verify the high-quality supply currents the harmonic content in the line current ia was calculated, as shown in Figure 23; the measured current THD was 4.43%, being the power rated at 5 kW. Two main current harmonic clusters were found at the harmonic order of n = 242 and n = 488, corresponding to the frequencies of 14.5 kHz and 29.28 kHz, which were increased in amplitude since four switching transitions take place between space vector combinations during a switching period.
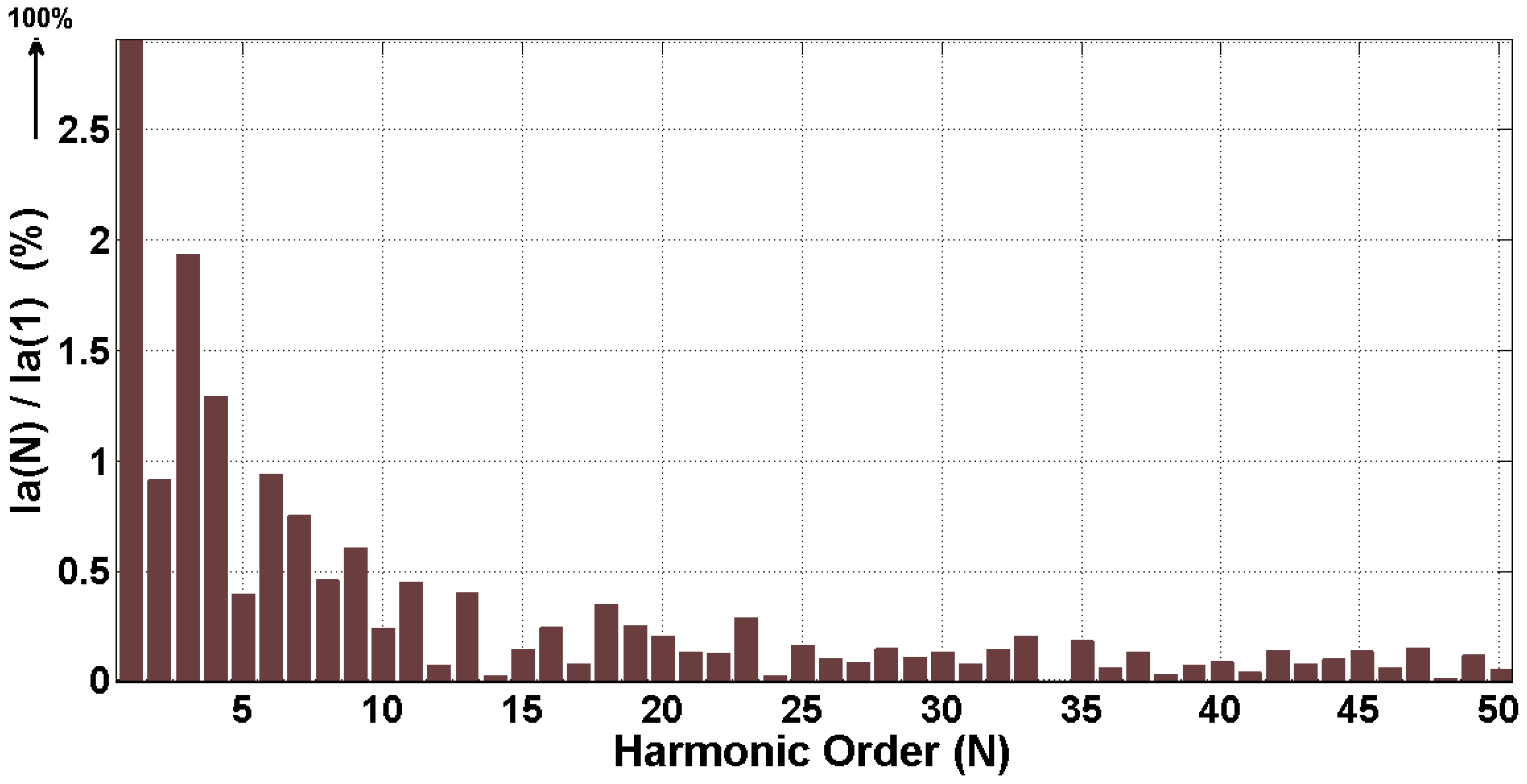
The low order harmonic content of the input current was compared with the Standard EN61000-3-2 [22], for the limits of Class A converters. Figure 24 shows that the components are within the standard limits; for example, for n = 3, the amplitude is 0.39 A, 2% of the fundamental, that is less than limit, 2.3 A.
6. Comparison of the Proposed Converter with Other AC-DC Topologies
Table 5 presents a detailed comparison of the proposed topology with four other AC-DC converters of different levels. The first row of this table is referred to the charging power levels for EVs, which are currently three according to the International Electrotechnical Commission standard IEC61851 [23]. Level 1 is for small on-board battery chargers with typical use in home or office; Level 2 is for medium power battery chargers that can be used in private or public outlets, and Level 3 is generally designed for a recharging station for commercial and public transportation. The proposed topology is intended for Level 3 applications, which justifies the use of a three-phase voltage supply.
Table 5 shows that the number of switching devices used in the proposed converter is slightly higher in contrast to the topologies described in [14,15,16]; however, only four of them are located on-board the vehicle. The use of the bidirectional switches in the matrix converter allows the possibility power flow reversal through the converter, being more suitable to future smart grids. The implementation of the proposed AC-DC modular converter is considering the use of high-frequency, nanocrystal magnetic materials for the transformer core. In this fashion, higher power capability may be obtained with distributed gapped cores, such as the used in [15], increasing the efficiency limit by the actual wireless coupling techniques used in actual AC-DC chargers for wireless electric vehicles [22].
7. Conclusions
The splitting of a conventional active rectifier into a matrix converter and an H bridge linked through a high-frequency transformer resulted in an AC-DC modular converter topology ideal for high power density applications. The converter portion on board makes the topology particularly attractive for PEV’s; nevertheless, the technique is suitable for other applications. A SVPWM technique with ZVT was proposed for the described converter which allows symmetric generation of virtually square current waves that are attractive for high-frequency wireless transmission of high power.
The topology was verified using a numerical prediction performed in Saber which resulted in high-quality supply currents with a current THD of 4.43%. An input-to-output power balance was verified ensuring reliable power transmission. The high-frequency switching of 7.2 kHz allowed ZVT of the semiconductor devices, since a short overlap period was caused by a simple sequential logic circuitry which aids to the reduction of the switching power losses of typical SVPWM schemes; nevertheless, semiconductor current monitoring is required to obtain correct switching behavior of the matrix converter.
Future aims of research of this topology consider its practical development at higher switching frequencies, allowing further reduction of size and weight, possibility of wireless power transmission, which would be particularly attractive for reliable and risk free charging of electric vehicles. Furthermore, the application of the proposed topology could be examined for other power electronic topologies.
Acknowledgments
The authors are grateful to the Fronteras de la Ciencia Research Project No. 101 of the Consejo Nacional de Ciencia y Tecnología of Mexico (CONACyT), the Instituto Politécnico Nacional of Mexico (IPN) for their encouragement and kind economic support to realize the research project. In addition, we are grateful to the Fondecyt Regular 1160690 Research Project.
Author Contributions
Jazmin Ramirez-Hernandez and Ismael Araujo-Vargas developed the principle of operation of the proposed AC-DC converter. The topology of the AC-DC converter was proposed by Marco Rivera. The numerical simulation results were obtained by Jazmin Ramirez-Hernandez using the Synopsis Saber Software, which was validated by Ismael Araujo-Vargas. Furthermore, the paper writing was done by Jazmin Ramirez-Hernandez and revised by Ismael Araujo-Vargas with a technical revision scope of Marco Rivera. All authors were involved and contributed in each part of the article for its final depiction as a research paper.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| Cz1, Cz2 | Zero crossing detector signals |
| ia, ib, ic | Line current in phase a, b and c respectively |
| iL | Three-phase line current vector |
| iLS | Current through the leakage inductance |
| iQ1, iQ4, iQ3, iQ6 | Current through switches Q1, Q4, Q3 and Q6 respectively |
| iprim | Current in the primary side of the transformer |
| isec | Current in the secondary side of the transformer |
| Iprimpk | Peak magnitude of the current in the primary side of the transformer |
| irect | H-bridge output current |
| Irect | Peak magnitude of H-bridge output current |
| L | Line inductor |
| Ls | Transformer leakage inductance |
| Ma | Modulation index |
| Mamin, Mamax | Minimum and maximum modulation index variation |
| n | Transformer turns ratio |
| Pin, Pout | Input and output power |
| Pomin, Pomax | Minimum and maximum output power variation |
| PWMa, PWMb, PWMc | Digital signals obtained from the comparison between conventional active periods and a high-frequency carrier triangular waveform |
| Q1-Q6 | Bi-directional switches in the matrix converter |
| Qa, Qb, Qc, Qd | H-bridge control signals |
| Q1a, Q1b, Q4a, Q4b | Control signals in the first matrix converter leg |
| Q3a, Q3b, Q6a, Q6b | Control signals in the second matrix converter leg |
| R | Output load |
| Sa, Sb, Sc | Conventional active rectifier switching states |
| Sa’, Sb’, Sc’ | Intermediate signals to obtain the matrix converter switching states |
| Sam, Sbm, Scm | Matrix converter switching states |
| Sx, Sy | H-bridge switching states |
| sv1 to sv6 | Active voltage space vectors |
| sv0 | Neutral voltage space vector |
| SQ1 to SQ6 | Vector of matrix converter switching states combinations |
| S1 to S6 | Sectors in the α-β plane |
| T | Switching period |
| Ta, Tb, Tc | Conventional SVPWM active periods |
| tD | Overlap period required in the active-to-active switching transition |
| TovL | Matrix converter legs overlap period |
| tr | Turning off time in the semiconductor devices |
| TSV0H | Short-circuit period in the H-bridge |
| TSV1, TSV2, TSV4, TSV5 | Active times of the space vectors sv1, sv2, sv4 and sv5 respectively |
| va, vb, vc | Phase a, b and c voltages |
| vacG, vbcG, vccG | Matrix converter voltages referred to the G node |
| vcav | Averaged converter voltage vector |
| Vcpk | Peak magnitude of the averaged converter voltage vector |
| vcavd, vcavq | Converter d-q-axis voltage |
| Vcpkmin, Vcpkmax | Minimum and maximum peak converter voltage variation |
| vL | Line inductor voltage vector |
| VLpk | Peak magnitude of line inductor voltage vector |
| Vo | Output voltage |
| vprim | Voltage in the primary side of the transformer |
| vQ1, vQ4 | Voltages in switches Q1 and Q4 respectively |
| vsec | Voltage in the secondary side of the transformer |
| vs | Three-phase source voltage vector |
| vsmin, vsmax | Minimum and maximum three-phase source voltage vector variation |
| Vspk | Peak magnitude of the three-phase source voltage vector |
| Vspkmin, Vspkmax | Minimum and maximum voltage supply variation |
| vxy | Voltage generated by the H bridge |
| vxG, vyG | H-bridge legs voltages referred to the G node |
| θc | Converter operation phase |
| θs | Source phase |
| φ | Phase between vs ad vcav vectors |
| φmin, φmax | Minimum and maximum phase φ variation |
References
- Fariborz, M.; Wilson, E.; Wiliam, G.D. Efficiency evaluation of single-phase solutions for AC-DC PFC boost converters for plug-in-hybrid electric vehicle battery chargers. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010. [Google Scholar]
- Lingxiao, X.; Zhiyu, S.; Dushan, B.; Paolo, M.; Daniel, D. Dual Active Bridge-Based Battery Charger for Plug-in Hybrid Electric Vehicle with Charging Current Containing Low Frequency Ripple. IEEE Trans. Power Electron. 2015, 30, 7299–7307. [Google Scholar] [CrossRef]
- Muntasir, U.; Wilson, E.; Fariborz, M. A hybrid resonant bridgeless AC-DC power factor correction converter for off-road and neighborhood electric vehicle battery charging. In Proceedings of the Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Hernandez, J.; Ortega, M.; Medina, A. Statistical characterization of harmonic current emission for large photovoltaic plants. Int. Trans. Electr. Energy Syst. 2014, 24, 1134–1150. [Google Scholar] [CrossRef]
- European Committee for Electrotechnical Standardization. Limits for Harmonic Current Emissions; CENELEC: Brussels, Belgium, 1995. [Google Scholar]
- Bhim, S.; Sanjeev, S.; Ambrish, C. Comprehensive Study of Single-Phase AC-DC Power Factor Corrected Converters with High-Frequency Isolation. IEEE Trans. Ind. Inform. 2011, 7, 540–556. [Google Scholar] [CrossRef]
- Rao, S.; Berthold, F.; Pandurangavittal, K.; Benjamin, B.; David, B.; Sheldon, W.; Abdellatif, M. Plug-in Hybrid Electric Vehicle energy system using home-to-vehicle and vehicle-to-home: Optimizaton of power converter operation. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 16–19 June 2013. [Google Scholar]
- Fariborz, M.; Wilson, E. Overview of wireless power transfer technologies for electric vehicle battery charging. IET Power Electr. 2014, 7, 60–66. [Google Scholar] [CrossRef]
- Deepak, R.; Vamsi, K.; Akash, R.; Najath, A.A.; Sheldon, S.W. Modified resonant converters for contactless capacitive power transfer systems used in EV charging applications. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016. [Google Scholar]
- Chia-Ho, O.; Hao, L.; Weihua, Z. Investigating Wireless Charging and Mobility of Electric Vehicles on Electricity Market. IEEE Trans. Ind. Electron. 2015, 5, 3123–3133. [Google Scholar] [CrossRef]
- Chunyang, G.; Krishnamoorthy, H.; Prasad, N.; Yongdong, L. A novel medium-frequency-transformer isolated matrix converter for wind power conversion applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Peschiera, B.; Williamson, S. Review and comparison of inductive charging power electronic converter topologies for electric and plug-in hybrid electric vehicles. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 16–19 June 2013. [Google Scholar]
- Zhao, J.; Jiang, J.; Yang, X. AC-DC-DC isolated converter with bidirectional power flow capability. IET Power Electron. 2010, 4, 472–479. [Google Scholar] [CrossRef]
- Rizzoli, G.; Zarri, M.; Mengoni, A.; Tani, A.; Attilio, L.; Serra, G.; Casadei, D. Comparison between an AC-DC matrix converter and an interleaved DC-DC converter with power factor corrector for plug-in electric vehicles. In Proceedings of the IEEE International Electric Vehicle Conference, Florence, Italy, 17–19 December 2014. [Google Scholar]
- Whitaker, B.; Barkley, A.; Cole, Z. A High-Density, High-Efficiency, Isolated On-Board Vehicle Battery Charger Utilizing Silicon Carbide Power Devices. IEEE Trans. Power Electron. 2014, 29, 2606–2617. [Google Scholar] [CrossRef]
- Bojarski, M.; Asa, E.; Colak, K.; Dariusz, C. Analysis and Control of Multi-Phase Inductively Coupled Resonant Converter for Wireless Electric Vehicle Charger Applications. IEEE Trans. Transp. Electr. 2017, 3, 312–320. [Google Scholar] [CrossRef]
- Il-Oun, L. Hybrid PWM-Resonant Converter for Electric Vehicle On-Board Battery Chargers. IEEE Trans. Power Electron. 2016, 31, 3639–3649. [Google Scholar] [CrossRef]
- Dong-Gyun, W.; Yun-Sung, K.; Byoung-Kuk, L. Effect of PWM schemes on integrated battery charger for plug-in hybrid electric vehicles: Performance, power factor, and efficiency. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Onur, S.; Erkan, M. Investigating DC link current ripple and PWM modulation methods in Electric Vehicles. In Proceedings of the 3rd International Conference on Electric Power and Energy Conversion Systems, Istanbul, Turkey, 2–4 October 2013. [Google Scholar]
- Grahame, D.; Lipo, T. Modulation of Three-Phase Voltage Source Inverters. In Pulse Width Modulation for Power Converter Principles and Practice; Wiley-IEEE Press: Piscataway, NJ, USA, 2003; pp. 215–258. ISBN 9780470546284. [Google Scholar]
- Forsyth, A.J.; Mollov, S.V. Modelling and control of DC-DC converters. Power Eng. J. 1998, 12, 229–236. [Google Scholar] [CrossRef]
- Jianyong, L.; Yitong, C.; Deliang, L.; Lin, G.; Fei, D.; Fangjun, J. Novel network model for dynamic stray capacitance analysis of planar inductor with nanocrystal magnetic core in high frequency. In Proceedings of the IEEE Conference on Electromagnetic Field Computation, Chicago, IL, USA, 9–12 May 2010. [Google Scholar]
- Pedersen, A.; Martinenas, S.; Andersen, P.; Thomas, M.S.; Henning, S.H. A method for remote control of EV charging by modifying IEC61851 compliant EVSE based PWM signal. In Proceedings of the IEEE International Conference on Smart Grid Communications, Miami, FL, USA, 2–5 November 2015. [Google Scholar]
Figure 1.
(a) Conventional active rectifier; (b) Circuit diagram of the proposed modular AC-DC converter.
Figure 1.
(a) Conventional active rectifier; (b) Circuit diagram of the proposed modular AC-DC converter.

Figure 2.
Derivation of the transistor switching states of the modular active rectifier of Figure 1b together with their voltage converter waveforms: (a) switching state Sa; (b) switching state Sb; (c) switching state Sc; (d) switching state Sx; (e) switching state Sy; (f) voltage vxG; (g) voltage vyG; (h) voltage vsec; (i) switching state Sam; (j) switching state Sbm; (k) switching state Scm; (l) voltage vacG; (m) voltage vbcG; (n) voltage vccG.
Figure 2.
Derivation of the transistor switching states of the modular active rectifier of Figure 1b together with their voltage converter waveforms: (a) switching state Sa; (b) switching state Sb; (c) switching state Sc; (d) switching state Sx; (e) switching state Sy; (f) voltage vxG; (g) voltage vyG; (h) voltage vsec; (i) switching state Sam; (j) switching state Sbm; (k) switching state Scm; (l) voltage vacG; (m) voltage vbcG; (n) voltage vccG.

Figure 3.
Space Vector Bi-dimensional plane.

Figure 4.
Ideal wavfeorms: (a) Voltage vxy; (b) voltage vsec; and (c) current through the transformer, iLS.
Figure 4.
Ideal wavfeorms: (a) Voltage vxy; (b) voltage vsec; and (c) current through the transformer, iLS.

Figure 5.
Block diagram for AC-DC operation of the modular converter of Figure 1b.
Figure 5.
Block diagram for AC-DC operation of the modular converter of Figure 1b.

Figure 6.
Block diagram to generate the switching states for the matrix converter and the H bridge.

Figure 7.
Generation of PWM signals, and conventional active rectifier switching states. (a) High-frequncy triangular carrier signal; (b) digital signal PWMa; (c) digital signal PWMb; (d) digital signal PWMc; (e) switching state Sa; (f) switching state Sb; (g) switching state Sc; (h) digital signal S’a; (i) digital signal S’b; (j) digital signal S’c.
Figure 7.
Generation of PWM signals, and conventional active rectifier switching states. (a) High-frequncy triangular carrier signal; (b) digital signal PWMa; (c) digital signal PWMb; (d) digital signal PWMc; (e) switching state Sa; (f) switching state Sb; (g) switching state Sc; (h) digital signal S’a; (i) digital signal S’b; (j) digital signal S’c.

Figure 8.
Switching sequence in the on-to-off transition from neutral-to-active switching state. (a) initial current flow; (b) overlap time; (c) current flow in the opposite direction.
Figure 8.
Switching sequence in the on-to-off transition from neutral-to-active switching state. (a) initial current flow; (b) overlap time; (c) current flow in the opposite direction.

Figure 9.
Switching sequence in the on-to-off transition from active-to-active switching state. (a) initial current flow; (b) overlap time; (c) current flow in the opposite direction; (d) bidirectional switch in on state.
Figure 9.
Switching sequence in the on-to-off transition from active-to-active switching state. (a) initial current flow; (b) overlap time; (c) current flow in the opposite direction; (d) bidirectional switch in on state.

Figure 10.
Generalized diagram for steady-state analysis

Figure 11.
Phasorial diagram for the AC-DC converter operation.

Figure 12.
ϕmin and ϕmax obtained for different values of L.

Figure 13.
Mamin and Mamax obtained for different n.

Figure 14.
General scheme used in simulation.

Figure 15.
Variation of φ: (a) φ = 3°; (b) φ = 7°.

Figure 16.
Simulation results (a) Supply voltage vaN and line current ia; (b) converter voltage in phase a; and (c) High-frequency current and voltage in the primary side of the transformer. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 16.
Simulation results (a) Supply voltage vaN and line current ia; (b) converter voltage in phase a; and (c) High-frequency current and voltage in the primary side of the transformer. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 17.
Simulations results: conventional switching states (a) Sa, (b) Sb and (c) Sc; H-bridge switching states (d) Sx and (e) Sy and voltages (f) vxG (g) vyG and (h) vxy. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 17.
Simulations results: conventional switching states (a) Sa, (b) Sb and (c) Sc; H-bridge switching states (d) Sx and (e) Sy and voltages (f) vxG (g) vyG and (h) vxy. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 18.
Simulations results: (a) conventional switching states Sa; (b) Sb; and (c) and Sc; (d) matrix converter switching states Sam; (e) Sbm; and (f) Scm; (g) Voltage vacG; (h) vbcG; and (i) vccG. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 18.
Simulations results: (a) conventional switching states Sa; (b) Sb; and (c) and Sc; (d) matrix converter switching states Sam; (e) Sbm; and (f) Scm; (g) Voltage vacG; (h) vbcG; and (i) vccG. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 19.
Simulation results: (a) voltage vxy; (b) vsec; (c) current iLs; (d) Expanded portion of the first semicycle; (e) expanded portion of TovL; and (f) expanded portion of the second semicycle. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 19.
Simulation results: (a) voltage vxy; (b) vsec; (c) current iLs; (d) Expanded portion of the first semicycle; (e) expanded portion of TovL; and (f) expanded portion of the second semicycle. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 20.
Simulation results to verify ZVT during the switching transition to turn on Q4, (a) control signals Q1a, Q1b, Q4a, Q4b; (b) iQ4 and vQ4; (c) iQ1 and vQ1; and (d) vsec and iLs. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 20.
Simulation results to verify ZVT during the switching transition to turn on Q4, (a) control signals Q1a, Q1b, Q4a, Q4b; (b) iQ4 and vQ4; (c) iQ1 and vQ1; and (d) vsec and iLs. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 21.
Simulation results to verify ZVT during the switching transition to turn on Q1, (a) control signals Q1a, Q1b, Q4a, Q4b; (b) iQ1 and vQ1; (c) iQ4 and vQ4; and (d) vsec and iLs. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.
Figure 21.
Simulation results to verify ZVT during the switching transition to turn on Q1, (a) control signals Q1a, Q1b, Q4a, Q4b; (b) iQ1 and vQ1; (c) iQ4 and vQ4; and (d) vsec and iLs. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 22.
Simulations results for (a) iLs; (b) irect. Supply: 127 V, 60 Hz, Output: 100 V, 5 kW.

Figure 23.
Harmonic content for line current ia.

Figure 24.
Low Harmonic content for line current ia for comparison with Standard EN 61000-3-2.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Switching states vectors of matrix converter.
| Switching State Combination | Sam, Sbm and Scm States |
|---|---|
| SQ1 | (1, 0, 0) |
| SQ2 | (1, 1, 0) |
| SQ3 | (0, 1, 0) |
| SQ4 | (0, 1, 1) |
| SQ5 | (0, 0, 1) |
| SQ6 | (1, 0, 1) |
Table 2.
Switching states vectors.
| Angle θc | Sector | vprim (+) | vprim (−) |
|---|---|---|---|
| Switching State | Switching State | ||
| 1–60° | S1 | SQ1, SQ2 | SQ4, SQ5 |
| 61–120° | S2 | SQ2, SQ3 | SQ5, SQ6 |
| 121–180° | S3 | SQ3, SQ4 | SQ6, SQ1 |
| 181–240° | S4 | SQ4,SQ5 | SQ1, SQ2 |
| 241–300° | S5 | SQ5, SQ6 | SQ2, SQ3 |
| 301–360° | S6 | SQ6, SQ1 | SQ3, SQ4 |
Table 3.
iLS magnitude for each switching state.
| Switching State | iprim |
|---|---|
| SQ1 | iprim = ia − ib − ic |
| SQ2 | iprim = ia + ib − ic |
| SQ3 | iprim = ib – ia − ic |
| SQ4 | iprim = ib + ic – ia |
| SQ5 | iprim = ic − ib – ia |
| SQ6 | iprim = ia − ib + ic |
Table 4.
Simulation Parameters.
| Parameter | Value |
|---|---|
| Source voltage va, vb and vc | 180 V peak |
| Source frequency | 60 Hz |
| Switching fequency | 7.2 kHz |
| Input inductor L | 3 mH |
| Index modulation Ma | 0.628 |
| Input resistor R | 0.1 Ω |
| Leakage Inductance Ls | 50 µH |
| Turns ratio n | 5:1 |
| Output voltage Vo | 100 V |
| Output Power Po | 5 kW |
Table 5.
Comparison with three other AC-DC converters.
| Topology | Proposed AC-DC Modular Converter | Three-Phase PFC Rectifier with DC-DC Converter, [14] | AC-DC Matrix Converter, [14] | Isolated On-Board Vehicle Battery Charger Utilizing SiC Power Devices, [15] | Inductively Coupled Multi-Phase Resonant Wireless Converter, [16] | |
|---|---|---|---|---|---|---|
| Factor | ||||||
| Level | 3 | 2 | 2–3 | 1–2 | 1 | |
| Supply voltage phases | 3 | 3 | 3 | 1 | 1 | |
| Switching Devices | 16 (4 on board) | 12 | 12 | 6 | 6 | |
| THD | 4.40% | <5% | <1% | 4.20% | <5% | |
| Switching losses | Virtual 0 W (ZVT) | 241.1 W | 165.2 W | 0 W (using ZVT) | 0 W (using ZVT) | |
| Switching Frequency | 7.2 kHz | 10 kHz | 10 kHz | 250 kHz | 83–88 kHz | |
| Capability to reverse power flow | Yes | No | Yes | No | No | |
| Possibility to split the converter | Yes | No | No | No | Yes | |
| Output Power | 5–20 kW | 22.6 kW | 20.4 kW | 6.1 kW | 1 kW | |
| Efficiency | 95.8% (estimated) | 97.72% | 96.80% | 94% | 93.34% | |
| Total Volume On-Board Converter | 1700 cm3 (Estimated) | 8430 cm3 | 6668.5 cm3 | 1742 cm3 | 5250 cm3 (Estimated) | |
| Power Density | 10 kW/dm3 (Estimated) | 3.8 kW/dm3 | 4.3 kW/dm3 | 5 kW/dm3 | 192 W/dm3 (Estimated) | |
| Advantages over others | Reduces the size of the converter located on-boar the vehicle. The SVPWM together with ZVT generate high-quality sinusoidal currents with null switching losses | Eliminates harmonics, improves the power factor, great simplicity, stable and reliable operation | The volume of the reactive components is reduced. Passive components are not needed in intermediate steps | The switching frequency is increased, the size and weight is reduced | Full-range regulation from zero to full power without switching losses | |
| Major Drawbacks | The efficiency can be reduced by using the transformer | Need to be followed by a step-down DC-DC converter. Passive components are required in intermediate steps | The converter is on-board the vehicle. When the switching devices reach the temperature of 145°, the maximum output power decreases | The conversion is made by three steps with intermediate passive components. Not suitable for high power applications | Not suitable for high power applications. More than transformers are used, increasing the losses | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ramirez-Hernandez, J.; Araujo-Vargas, I.; Rivera, M. A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles. Energies 2017, 10, 1386. https://doi.org/10.3390/en10091386
AMA Style
Ramirez-Hernandez J, Araujo-Vargas I, Rivera M. A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles. Energies. 2017; 10(9):1386. https://doi.org/10.3390/en10091386
Chicago/Turabian StyleRamirez-Hernandez, Jazmin, Ismael Araujo-Vargas, and Marco Rivera. 2017. "A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles" Energies 10, no. 9: 1386. https://doi.org/10.3390/en10091386
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.